半挂汽车列车AEBS 控制策略研究
2021-12-30郭祥靖刘双平
郭祥靖,刘 勇,刘 壮,刘双平
(东风商用车技术中心,湖北 武汉 430000)
自动紧急制动系统(Advanced Emergency Braking System,AEBS)是一种高级辅助驾驶系统(Advanced Driver Assistance System,ADAS)。该系统通过雷达、摄像头等传感器探测前方目标,当判定自车与前车或行人有碰撞危险时,通过仪表等图像、声音方式对驾驶员进行预警,若驾驶员不采取主动避撞措施,且达到AEBS系统所判断的碰撞危险状态时,系统将对车辆进行紧急制动,以避免或减轻碰撞的发生。
文献[1]建立了以驾驶意图、天气、路面、自车车速、反应时间、车辆制动最大减速度及车辆期望加速度为模糊集的模糊推理算法,并通过引入碰撞时间,提出了带有辅助制动的主动避撞控制算法,结果表明,该算法提高了预警的可靠性、实时性和准确性。文献[2]引入适应系数对安全距离进行调节,通过建立本车车速、前车车速、前车纵向加速度及适应系数的模糊规则控制算法,并采用粒子群算法在线优化模糊系统,结果表明,该算法能提高驾驶员对碰撞系统的接受程度,可以减少不必要的报警。文献[3]提出了一种基于路面附着系数和驾驶员驾驶倾向的纵向安全距离模型,并从行车安全距离、制动控制器、制动力分配器分析,设计纵向主动避撞系统,最后利用dSPACE进行了整车实验,验证了控制策略的合理性。文献[4]提出一种基于峰值附着系数曲面的路面辨识算法,并建立了制动系统执行机构控制模型以及防抱死控制模型,最后通过CarSim、Simulink和AMESim配置的软件仿真环境进行了控制策略的验证。张雪峰等[5]利用车辆速度为依据,对车辆行驶状态进行低速和高速两种分类,分别使用车头时距和传统基本制动的方法建立安全距离模型,使用危险系数对车辆安全状态进行划定,基于模糊数学理论实现了对路面摩擦系数识别的方法,对驾驶员反应时间系数进行模糊化推理,更适合多种风格的驾驶员。在中低速工况下实现了车辆的自适应巡航,并且在危险工况下可以实现主动避撞功能,使用CarSim与Simlink搭建模型在不同路面进行仿真,验证了系统优秀的控制效果。文献[6]利用BP神经网络算法预测车辆的相对减速度和跟随距离,通过仿真得出该方法能提高预警距离的预警精度。文献[7]建立了基于附着系数和驾驶意图的纵向安全距离模型以及车辆侧向动力学稳定的单输入单输出系统模型,并提出了基于约束的再生制动强度的制动力分配策略,最后验证了纵向和侧向安全距离的安全性和车辆的操纵稳定性。
本文基于安全距离提出了一种基于危险系数的分级制动控制策略,并以前馈期望的制动压力和反馈PID算法相结合的控制策略得到各轴车轮制动压力,最后利用TruckSim搭建AEB典型的3种试验场景,通过与Simulink进行联合仿真对控制策略进行了验证。
1 碰撞预警模型
1.1 安全距离模型
建立准确的安全距离模型对于AEBS系统的危险等级判断是至关重要的,其直接影响最终的避撞成功率。由于安全距离与本车和前车的制动距离有关,本文将安全距离的计算分为前车减速、前车匀速、前车静止、前车加速4种场景进行分析。
1.1.1 前车减速行驶
当前车减速行驶时,本车与前车的驾驶场景以速度分析有3种状态:本车速度小于前车速度、本车速度与前车相等、本车速度大于前车速度;以减速度分析同样是3种状态:本车减速度小于前车减速度、本车减速度等于前车减速度、本车减速度大于前车减速度。设本车制动前的速度为vh0,本车完全制动减速度为aht,前车制动前的速度为ve0,前车制动减速度为aet。
当本车制动前速度大于前车制动前速度,且本车完全制动减速度小于前车制动减速度时,最终只需两车车速相等即避免碰撞,故安全距离可表示为:

式中:t1——驾驶员反应时间,s;t2——制动器夹紧过程所需要的时间,s;t3——制动减速度线性增加过程时间,s;ΔS——本车与前车都停止时保持的最小间距,m。
当本车制动前速度大于前车制动前速度,且本车完全制动减速度等于前车制动减速度时,最终需要两车车速均减速至0时,才能避免碰撞,故安全距离可表示为:

当本车制动前速度等于前车制动前速度,且本车完全制动减速度大于前车制动减速度时,最终只需两车车速均减速至0时,才能避免碰撞,故安全距离可表示为:

当本车车速与前车车速相等,且本车制动减速度大于前车制动减速度,或本车制动减速度等于前车制动减速度时,无碰撞危险,故本文不作讨论。
1.1.2 前车匀速行驶
当前车匀速行驶时,只有本车制动前速度大于前车制动前速度时,才会有碰撞危险。其最终只需两车车速相等即避免碰撞,故安全距离可表示为:

1.1.3 前车静止
当前车为静止车辆时,最终只需两车车速均减速至0时,才能避免碰撞,故安全距离可表示为:

1.1.4 前车加速行驶
前车加速行驶,当本车车速小于前车车速时,无碰撞危险;当本车车速大于前车车速时,两车的距离达到最小安全距离时就会存在碰撞危险,故本文只考虑本车车速大于前车车速的情况。
当本车制动前速度大于前车制动前速度,其最终只需两车车速相等即避免碰撞,故安全距离可表示为:

1.2 分级制动模型
由于自动紧急制动的驾驶场景极其复杂,故需要对危险预警的判断进行细致区分,即能够及时提醒驾驶员进行避撞,以及通过系统判断进行自动紧急避撞,还需尽可能地考虑紧急制动时驾驶员的舒适性和接受程度。本文通过危险系数作为紧急制动时不同危险等级状态的判断依据。
当车辆在道路跟车行驶时,跟车距离在不同驾驶员心里有不同的接受度,其除了必要的紧急制动安全距离以外,还需加上驾驶员所接受的额外心理安全距离,故定义报警安全距离Sw为:

式中:S——紧急制动安全距离,m;vr——前车与本车相抵车速,m/s;tw——驾驶员所允许的最小安全时距,一般取1.2~2.0s[8],考虑到半挂汽车列车的制动距离较长,驾驶员心里所允许的时距更大,故取2~2.5s。
危险系数表征了车辆在道路行驶时,本车与前方车辆或行人发生碰撞的可能性。通常情况下,wh大于0时表示本车行驶安全,或者有潜在碰撞风险,wh小于0时表示即将发生碰撞,需要自动紧急制动系统主动干预制动。危险系数的计算公式如下所示[9]:

式中:Sr——前车与本车实时相对距离,m。
2 控制策略设计
2.1 基于危险系数的分级制动控制策略
通常情况下,自动紧急制动系统划分为3种危险状态:行驶安全状态、碰撞预警状态、碰撞危险状态。危险系数针对以上3种状态也大致以wh>1.0,0.4≤wh≤1.0,0≤wh≤0.4,wh<0四个区间来描述,并以制动器的状态分别称为待机状态、预制动状态、间歇制动状态、紧急制动状态[10]。其中待机状态和预制动状态可理解为行驶安全状态,间歇制动状态可理解为碰撞预警状态,紧急制动状态可理解为碰撞危险状态。考虑到半挂汽车列车紧急制动距离长的特点,本文将待机状态和预制动状态合并为同一种状态,即行驶安全状态。故本文按照通常方法,最终划分为3种安全等级:行驶安全级I级、碰撞预警级II级、碰撞危险级III级。I级表示本车行驶安全,无碰撞危险;II级表示本车有潜在的碰撞风险,需要驾驶员进行主动干预车辆进行制动或换道措施以避免碰撞,本文只通过仪表警示灯光、声音对驾驶员进行提醒,系统不进行主动干预;III级表示本车即将发生碰撞,需要紧急制动系统进行主动制动以避免碰撞的发生。
本文结合中国汽车技术研究中心发布的C-NCAP(China-New Car Assessment Programme)中国新车评价规程和GB/T 38186-2019商用车辆自动紧急制动系统(AEBS)性能要求及试验方法,设定了3种AEBS测试工况,主要为:本车接近前方静止目标车CCRs(Carto Car Rear stationary,CCRs),本车接近前方移动的目标车CCRm(Carto Car Rear moving,CCRm),本车接近前方制动的目标车CCRb(Carto Car Rear braking,CCRb)。
本文利用整车动力学仿真软件TruckSim搭建以上3种测试场景,得到了碰撞数据,制定了以下针对半挂汽车列车不同车速下的危险系数与对应安全等级,详见表1。并针对3种安全等级,制定了相应的期望减速度:当安全等级为I级时,期望减速度为0;当安全等级为II级时,本文不对车辆进行主动制动控制,故期望减速度为0;当安全等级为III级时,期望减速度为4m/s2。

表1 不同车速下的危险系数与对应安全等级
2.2 下层控制器
2.2.1 期望制动压力模型
当半挂汽车列车在水平道路行驶时,坡道阻力可视为0。针对上述整车紧急制动时所需的期望减速度,假设施加在整车上期望的制动力为Fdes,其纵向动力学方程可表示为[11]:

式中:ηT——传动系的机械效率,%;ig——变速器传动比;i0——主减速器传动比;r——车轮半径,m;g——重力加速度,m/s2;f——轮胎滚动阻力系数;CD——空气阻力系数;A——车辆迎风面积,m2;v——整车车速,km/h;δ——汽车旋转质量换算系数;ades——期望减速度,m/s2;m——整车质量,kg。
由于紧急制动系统触发时,驱动力矩为0Nm,则期望的制动力(N)可表示为:

进一步地,施加在整车的制动压力(MPa)可表示为:

式中:Kb——制动系统压力与制动力之比。
2.2.2 反馈PID算法的控制
上述得到整车所需的期望制动压力,但由于实际制动过程中系统存在扰动和不稳定因素,故本文采用PID控制算法跟踪期望的减速度,以整车期望的减速度与实际减速度的偏差为输入,通过PID反馈调节,得到整车所需的制动压力,最后以牵引车和半挂车的轴荷分配比得到各个车轮所需的制动压力。整车所需的制动压力如下公式所示:

式中:Kp、KI、KD——PID控制参数。
3 控制策略验证
为了验证上述控制策略的有效性,本文在TruckSim中搭建了半挂汽车列车AEB 测试场景,包括CCRs、CCRm、CCRb;主要验证内容有:基于危险系数的分级制动控制策略、上层分级制动控制策略验证、下层前馈制动力和PID反馈控制策略验证。
3.1 CCRs场景工况测试
在TruckSim仿真环境中,设置本车初始车速60km/h,前车初始车速0km/h,前车减速度0m/s2,初始距离80m。
由图1可知,在初始相对距离为80m时,本车及时检测到前方车辆车速较低的情况,仿真开始阶段即进入预警状态,并在2.4s左右进入紧急制动状态。由图2可知,本车较好地跟踪了期望减速度,且响应较快。在图3中可知本车进行了及时有效地制动,最后与前车相距6m。
3.2 CCRm场景工况测试
在TruckSim仿真环境中,设置本车初始车速70km/h,前车初始车速30km/h,前车减速度0m/s2,初始距离80m。
由图4可知,在初始相对距离为80m时,并在0.7s左右时进入预警状态,在之后大概4s的期间,本车并未做出避撞措施,故在4.6s左右进入紧急制动状态。由图5可知,本车较好地跟踪了期望减速度,且响应较快。在图6中也体现出本车在进入紧急制动状态后,及时有效地进行了制动,并避免了碰撞。

图2 本车期望与实际减速度对比

图3 本车车速与前车车速
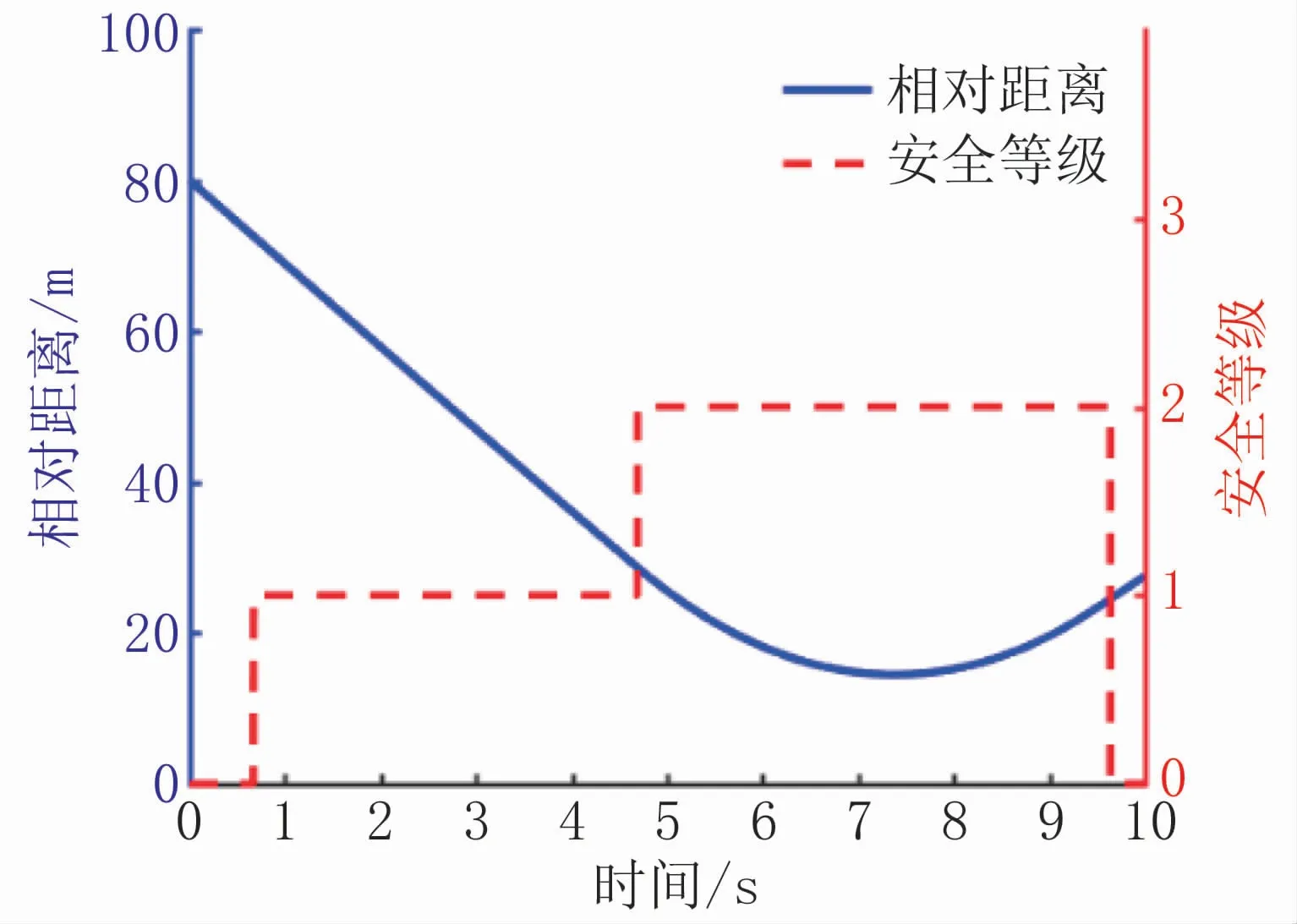
图4 相对距离与安全预警等级

图5 本车期望与实际减速度对比

图6 本车车速与前车车速
3.3 CCRb场景工况测试
在TruckSim仿真环境中,设置本车初始车速60km/h,前车初始车速60km/h,前车减速度3m/s2,初始距离50m。
由图7可知,仿真开始时,前车匀速行驶,故本车一直保持安全形势状态,当4s左右时,前车进入制动减速状态,本车在4.3s左右进入预警状态;由图8、图9可知,本车较好地跟踪了期望减速度,且响应较快。

图1 相对距离与安全预警等级

图7 相对距离与安全预警等级

图8 本车期望与实际减速度对比

图9 本车车速与前车车速
4 结论
本文提出了一种基于安全距离模型的不同车速下危险系数的分级制动控制策略,并以期望减速度得到期望的前馈制动压力,再利用PID算法得到整车所需的制动压力。最后本文在TruckSim中建立CCrb、CCrm、CCrs三种测试场景,对控制策略进行了验证。结果表明,本文所提出的控制策略能够有效避免碰撞的发生,提高了紧急制动时的稳定性和安全性。
