旋转行波型超声电机定子的非线性动力学分析
2024-02-29高建设
陶 征,赵 丹,高建设
(郑州大学机械与动力工程学院,河南 郑州 450001)
1 引言
超声电机(Ultrasonic Motor,简称USM)是一种全新概念的微特电机。它利用压电材料的逆压电效应,激发弹性体在超声频段内的微幅振动,并通过定、转子之间的摩擦作用来实现转子(动子)的旋转(直线)运动。相比于传统电磁电机,超声电机具有低速大扭矩、重量轻、结构紧凑、起停灵敏度高、响应快,不受外界磁场干扰等特点。这些特点使其在航天领域中的空间机器人、火星探测器和卫星等系统中有着广阔的应用前景[1]。2020年11月24日,中国新闻网报道由我国自行研制的超声电机已在嫦娥五号登月工程中获得成功应用,助力嫦娥五号奔月挖土。
超声电机是一项横跨振动、摩擦、材料等多学科的高新技术体系。其结构特点及其工作形式决定了该体系相比于一般的机械振动系统具有强非线性的特性。这一特性严重影响着超声电机运行的平稳性、可靠性,同时也为超声电机的运行控制带来了一定的困难。为此,超声电机的非线性建模问题已在该领域受到广泛的关注。文献[2]考虑定子、转子、摩擦和接触等因素建立了电机整机模型,该模型可预测电机输入输出功率和效率;文献[3]系统地研究了双模态纵扭直线型超声电机的动力学原理,通过数值仿真和实验发现了死区和饱和现象;文献[4]通过理论分析和实验观察得到兰杰文振子的滞后、频率漂移及饱和现象。文献[5-6]建立了定子驻波和行波振动的非线性动力学模型,应用多尺度法研究了定子的主共振响应,发现定子存在多解和跳跃现象;文献[7]在建立了超声电机非线性混沌分析模型后,分析了电机转速控制系统的非线性运行特性;文献[8]考虑了杆式电机摩擦、接触等非线性因素建立了精确有限元模型,设计制造了电机原理样机。这里通过四阶Runge-Kutta法、Lyapu‐nov指数、Poincaré截面等方法,针对TRUSM-60旋转型行波超声电机定子在单相激励下的振动响应特性进行了研究,获得了定子机体在一定激励频率下的非线性响应特性,为进一步研究超声电机的非线性问题提供了一定的基础。
2 定子的非线性动力学模型
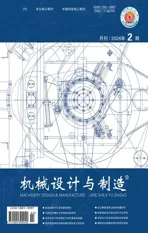
TRUSM-60旋转型行波超声电机定子结构,如图1所示。电机定子主要由线弹性金属体和压电陶瓷片构成。如前所述,当定子中的压电陶瓷片被施加一定频率的交变电压时,其逆压电效应将使定子弹性体产生相应的振动响应,如图3所示。

图1 超声电机定子结构图Fig.1 Stator Structure Chart of Ultrasonic Motor
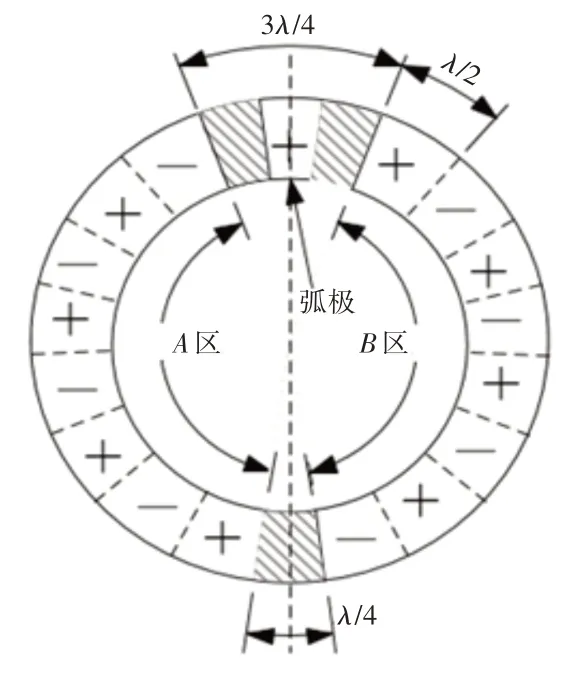
图2 压电陶瓷极化图Fig.2 Polarization Chart of Piezoelectric Ceramics

图3 定子振型图Fig.3 Stator Vibration Shape Chart
当激励频率接近或达到定子的固有频率时,定子达到共振状态。现有资料表明[9],压电陶瓷在强交变电场的作用下,由于极化后的压电陶瓷体内剩余极化残留出现翻转,使得压电陶瓷的机电耦合特性不再是简单的线性关系,强非线性则成为主要的表现特征。压电材料的这种非线性是形成定子体非线性问题的本质,在超声电机的诸多非线性因素中占有重要的地位,对电机性能有着重要的影响。
在科研学者前期研究的基础上,根据电机定子的结构特点,考虑压电材料的非线性本构关系,利用广义Hamilton变分原理和Rayleigh-Ritz模态假设方法建立了TRUSM-60型电机定子在单相电压激励下的非线性动力学模型,如式(1)所示。
式中:Mk—定子模态质量;Dk—定子模态刚度;Ck—模态阻尼系数;P(t)—定子模态坐标;机电耦合系数;Nk—压电陶瓷的电容系数与压电材料相关的非线性系数。压电材料的非线性本构关系为[10]:
式中:cE—平面刚度系数矩阵;e—压电系数矩阵;eS—介电系数矩阵;γ—电致弹性系数矩阵;β—电致伸缩系数矩阵。
式中:ϕwl—定子弯曲振型函数;ϕv—电势分布函数—非线性刚度系数。
令激励电压V(t)=V0cos(wt),将其代入式(1)中第一个方程,可得:
对式(12)进行无量纲化,引入无量纲时间[11]:
引入无量纲小量ε,将阻尼项、非线性刚度项考虑为一阶小量,外部激励项考虑为二阶小量,则动力学式(12)可以表示为:
式中:l—无量纲频率;
Δ—激励频率调谐参数;
ωn—定子固有频率。
3 定子非线性行为分析
分岔与混沌是非线性动力学系统所特有的一种运动形式,且对系统参数有较强的依赖性,因此,这里基于上述定子在单相激励下的非线性动力学方程,采用四阶Runge-Kutta 法、Lyapunov指数、Poincaré 截面等方法,对定子在单相激励下的振动响应随激励频率改变而变化的非线性动力学行为进行研究。仿真过程中所用参数,其中压电陶瓷材料为PZT-8,如表1所示。
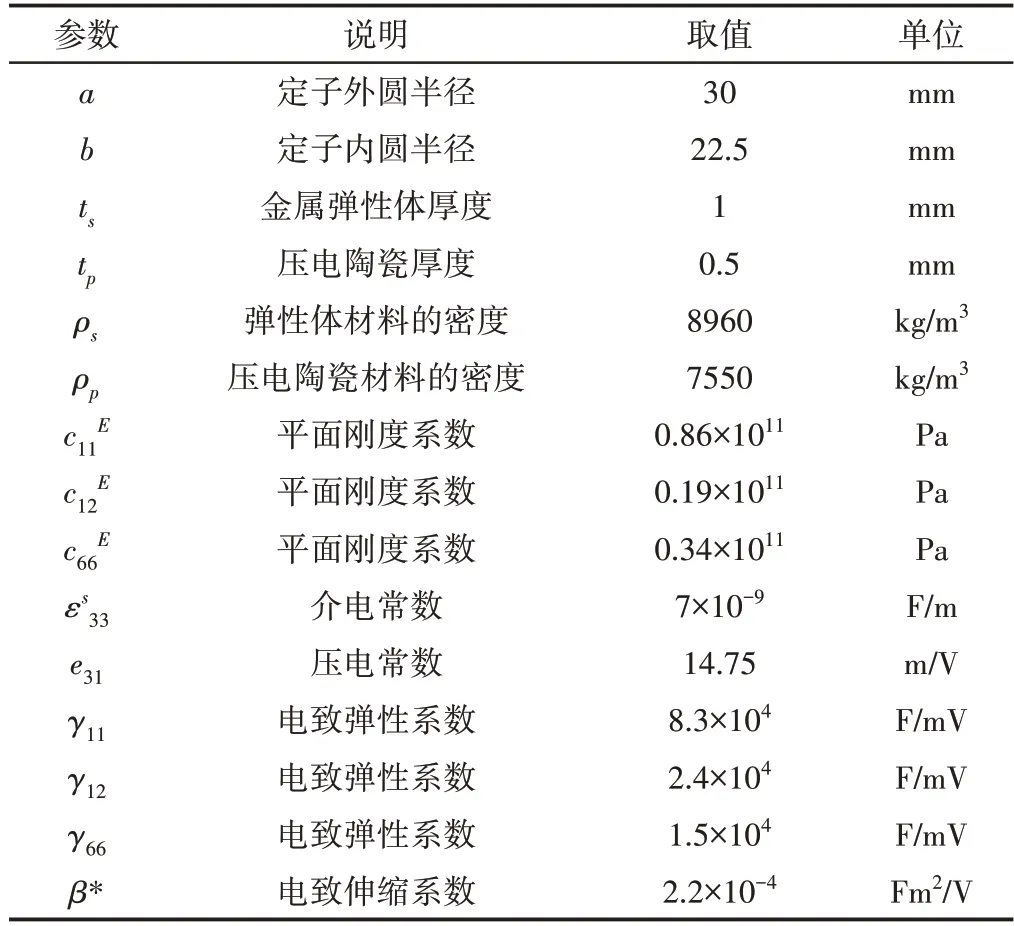
表1 定子的结构参数和材料参数Tab.1 The Structural Parameters and Material Parameters of Stator
当激励电压V0取150V,ε=0.1时,由式(17)可知,改变激励频率调谐参数Δ的值,可得定子在单相激励下的振动响应随激励频率改变而变化的特征,如图4、图5所示。

图4 分岔图Fig.4 Bifurcation Chart
图5 最大Lyapunov指数图Fig.5 Chart of the Largest Lyapunov Exponent

图6 定子系统局部分岔图Fig.6 Local Bifurcation Chart of Stator System
如图4所示,当Δ在(-8~4)范围变化时,定子的振动响应有明显的非稳定状态出现,其中,Δ在(-8~-7.4)区间变化时,定子振动出现Hopf分岔。如图5所示,可知Δ在(-8~-7.4)区间所对应的最大Lyapunov指数约为0,由最大Lyapunov指数特性可知,该处为典型的拟周期运动,定子振动处于不稳定状态。系统Hopf分岔过程中相应的Poincaré映射图,如图7所示。该图显示,当Δ=-7.4(分岔点A)时,Poincaré 截面成吸引环,随着分岔参数的不断变化,吸引不变圈不断膨胀直至变形,最终由拟周期运动过渡为单周期稳定运动状态。
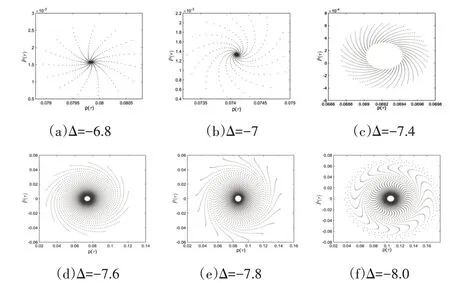
图7 定子分岔过程对应的庞加莱截面图(a)和(b)稳定的焦点;(c)吸引不变圈;(d)和(e)膨胀的吸引不变圈;(f)变形的吸引不变圈Fig.7 Poincaré Cross-Sections Corresponding to Stator Bifurcation Process(a)and(b)Stable Focus;(c)Attraction Invariant Loop;(d)and(e)Expanded Attraction Invariant Loop;(f)Deformation Attraction of Constant Circle
当Δ=-3.52时,系统出现跳跃现象。这一现象我们认为是压电陶瓷在交变电场的作用下,由压电材料的电致弹性和伸缩效应引起的非线性激振力导致能量损失所致。当Δ=(-3.52~-2.45)时,系统再一次出现Hopf分岔并逐渐演化为单周期运动。当Δ大于0,系统进入单周期稳定运动。
超声电机在实际应用中,为了获取能量转换最大效率,一般选取定子的共振频率作为其工作激励频率。以上各非稳定区则均出现在定子固有频率点的左侧,如图4 所示。这一现象似乎对实际工程应用并无影响,然而,由文献[11]可知,随着超声电机的连续工作,由于定转子之间的摩擦以及材料阻尼使机体温度升高而出现定子频率下降的频率漂移现象,导致电机输出稳定性下降。为解决这一现象,当前主流的控制策略是采用频率追踪技术,因此,实施这一控制方法过程中,回避图中非稳态区应得到关注。
另外,如图5所示,可以看出共振点(Δ=0)处的最大Lyapunov指数也是处于略大于0的状态,这一现象表明固有频率点或接近固有频率点处,定子振动状态应该也存在着一定的不稳定性。为此,我们对共振点(Δ=0)附近的定子振动特性作进一步的仿真分析,获得了定子系统分岔图,如图6所示。由图可知,定子在非常接近共振频率时的振动的确存在着一定的相对较弱的不稳定性。为此,我们认为,为了获得最佳电机工作状态,激励频率应适当高于定子固有频率。
4 结论
超声电机具有强非线性,笔者在四阶Runge-Kutta法、Lyapu‐nov指数、Poincaré截面等方法的基础上,用数值分析方法研究了旋转行波超声电机定子在单相激励下随频率变化时的非线性特性,结果表明定子系统在一定的频率范围内存在严重的非线性现象以及在共振点处仍然处于弱非稳定状态。基于上述分析,针对当前所采用的频率追踪控制技术给出了应避开非稳态区所对应频率以及电机激励频率应选取适当高于定子固有频率的建议。这些研究对进一步研究超声电机的动力学机理及工作的稳定性控制技术具有重要的意义。