篮球投篮机器人手臂运动轨迹优化方法研究
2024-02-29王第亮许思毛
王第亮,许思毛
(1.桂林信息科技学院,广西 桂林 541004;2.广西师范大学,广西 桂林 541004)
1 引言
篮球投篮机器人是执行投篮任务的机器装置,融合了机械机构与智能化控制等多种技术。机器人手臂是其中重要的组成部分,可保证篮球投篮机器人灵活执行投篮任务。优化机器人手臂的运动轨迹控制过程,可以提高机器人的目标控制稳定性[1],使机器人抛射篮球时更精准和快速。由此可见,研究机器人手臂运动轨迹优化控制方法[2]具有重要意义。
文献[3]采用改进的双模式混合差分进化算法,计算机器人手臂运动轨迹的参数解。将DHDF 算法中的F 因子改进处理为K因子,并采用天牛须算法展开优化提升,再结合DE策略,完成改进多目标轨迹优化方法。该方法可提高机器人的稳定性,但存在运动轨迹的角位移偏差等问题。文献[4]在笛卡尔模型中以机器人手臂为目标寻找到最佳路径,利用三次样条插值算法对最佳机器人手臂运动轨迹展开拟合优化处理,目的是让机器人手臂最末端运动轨迹持续光滑,保证机器人手臂运动的稳定性,降低轨迹运行带来的冲击力。但机械臂运动轨迹的角速度有待提升。文献[5]将平均五次B样条参数加入机器人手臂结构内建立插值曲线,在运动学限制的范围内,采用牛顿解法对机器人手臂运动轨迹的参数展开迭代并获得参数解。可提升机械臂运动速度,但角加速度的稳定性还需加强。
为了解决上述方法中存在的问题,提出篮球投篮机器人手臂运动轨迹优化控制方法研究。通过速度控制、扭矩控制和位置控制构成传达信息模式,构建投篮机器人手臂模型,获取机器人手臂位置的测量值。利用五次多项式函数规划篮球投篮机器人手臂的运动轨迹,提高机器人手臂关节控制能力。采用粒子群算法将粒子初始化后,得到粒子向量值,经迭代处理获取最佳值,完成投篮机器人手臂运动轨迹优化控制。
2 构建投篮机器人手臂控制模型
投篮机器人手臂运动轨迹控制模式是根据控制器向驱动器传达信息完成的,其传达信息模式的类别可分为速度控制、扭矩控制、位置控制。其中位置控制模式是篮球投篮机器人手臂运动过程中点至点之间的运动轨迹掌控。速度控制模式可精准获知投篮机器人手臂在规定时间范围内运动状态。
式中:υ—投篮机器人系统中断控制周期;li—投篮机器人系统输入值;期望状态下,该系统的第i个控制周期内可收到第i个周期的张量。使用速度li展开运动,运用投篮机器人系统中断控制周期时间υ,获取系统状态向量值可表示为:
式中:ε—预计投篮机器人手臂运动轨迹的中断周期数;条件为0 ≤t≤ε—投篮机器人手臂的初始状态—投篮机器人手臂运动的状态—机器人手臂在第0周期的运动轨迹数据采集—机器人手臂在第t周期的运动轨迹数据采集;—机器人手臂在第ε周期的运动轨迹数据采集。
当投篮机器人手臂运动轨迹状态nt为0时,输入预计控制周期轨迹可掌控投篮机器人手臂完成从开始至的完整过程。可用下式表示:
通过机器人手臂的运动轨迹,构建篮球投篮机器人手臂模型,如图1所示。

图1 投篮机器人手臂模型Fig.1 Shooting Robot Arm Model
将投篮机器人手臂底座定义为笛卡尔坐标系[6],该末端位姿定义为笛卡儿坐标系Ye,投篮机器人手臂基座的变换矩阵表示为0eY。进一步提升投篮机器人手臂的控制精度,使用外力视觉传感器对该机器的末端位置展开检测[7],在笛卡儿坐标系中,视觉传感器的末端位姿表示为Yc,变换矩阵表示为0cY,在视觉传感器的坐标系中,机器人手臂的位姿表示为ceY。检测得到投篮机器人手臂在笛卡儿坐标系的位姿表示为Ye,过程如下:
反馈模型为:
式中:ct—在t时刻的投篮机器人手臂系统状态,G(⋅)—运动学方法,通过上式(7)得知,Yc—固定值,检测后的投篮机器人手臂位置的测量值ceY等同于系统状态ct的函数。观测模型表达式为:
式中:ct—t周期状态;mt—t周期系统方差;Mt—测量噪声;xt—系统状态ct下,受到测量误差影响mt作用的测量值;g—映射关系;mt=0—不确定因素;理想测量值如下式:
通过以上步骤,完成投篮机器人手臂模型的构建。
3 投篮机器人手臂关节运动轨迹优化控制
根据上述模型得知各关节之间的时间与变化向量的参数关系,先对投篮机器人手臂的运动轨迹展开离散化处理,再加入逆运动学研究。采用三次多项式差值设计手臂运动轨迹时,只能保证位置连续位移和正常速度,在加速度状态下,容易发生跳跃情况和位移不连续的问题。而上述问题又会引发投篮机器人手臂关节之间的冲击与抖动情况,缩短了机器人的使用年限。在三次多项式的基础上采用五次多项式函数规划篮球投篮机器人手臂的运动轨迹[8],保证了机器人手臂关节间的速度、加速度、位移的连续性。五次多项式插值比三次多项式插值的次数多,能适应的条件也随之增多,所以利用五次多项式插值来拟合投篮机器人手臂各关节,获得连续平滑的运动轨迹。
设计更新投篮机器人手臂运动轨迹过程为:
式中:v0、v1、v2、v3、v4、v5—运动轨迹中五次多项式中的待定函数。
式(10)需要满足运动轨迹的起始点、末端点、速度、加速度要求,并作为设定条件,条件分别为
在投篮机器人手臂模型基础上使用五次多项式插值函数设计机械臂运动轨迹,并找出机械臂运动轨迹中对应的起始点b0和加速度s0、末端点b1和加速度s1、起点关节角w0、终点关节角w1,将以上的参数输入(10)中,获得机械臂运动轨迹过程,过程如下式:
考虑机器人工作过程中受到的冲击、消耗的能量及其工作效率,建立多目标机器人手臂运动轨迹优化控制目标函数:
式中:d1—投篮机器人手臂运行的整体时间,即关节间隔总数,可以决定机械臂的工作效率;d2—投篮机器人手臂关节运动轨迹的加速度,即消耗指标;d3—该手臂关节中的平均急动度,即冲击指标;T—投篮机器人手臂运动轨迹的总时间;si—机器人手臂关节的加速度;ki—机器人手臂关节的急动度。投篮机器人手臂运动中受到很多的约束条件,定义条件可分别表示为:
式中:h1(t)—投篮机器人手臂初始速度;h2(t)—手臂平均速度;h3(t)—手臂平均加速度;h4(t)—手臂平均急动度;Wkmax—关节位移最高值;Bkmax—速度最高值;Skmax—加速度最高值;Kkmax—急动度最高值。
4 粒子群算法优化控制运动轨迹
设计完投篮机器人手臂运动轨迹后仍存在问题,利用粒子群优化算法[9]改进并优化提升篮球投篮机器人手臂运动轨迹。首先对粒子展开初始化,采取迭代方法检索最佳值,每次迭代粒子都会通过两个最高值不断更新数值。两个最高值分别为个体极值pbest、全局极值gbest。检索空间定义为f,第个粒子i位置向量和速度向量定义为yi=[yi1,yi2,…,yif]T、bi=[bi1,bi2,…,bif]T,第i个粒子的个体极值pbest与全局极值gbest定义为Oi=[Oi1,Oi2,…,Oif]T、Og=[Og1,Og2,…,Ogf]T,优化算法下更新公式为:
式中:N—粒子群总数量—第l次迭代粒子i飞行速度向量的第f维分量—第l次迭代粒子位置向量的第f维分量;Oif—粒子在第f维的个体极值点位置pbest;Ogf—粒子群在第f维的全局极值点位置gbest;v1,v2—加速度因子;e—惯性因子;rand(⋅)—[0,1]之间的任意数值。
篮球投篮机器人手臂运动轨迹使用粒子群优化算法步骤如下:
(1)将粒子群β0i初始化处理,并在粒子与粒子群中寻找两个极值,分别表示为个体极值pbest和全局极值gbest。
(2)掌握各个粒子的向量值,根据上述式(11)中计算获得其目标参数,每次迭代后自动更新当前极值,当全局极值高于个体极值时,重新找寻个体极值。
(3)通过式(14),改变粒子的位置、速度。
(4)当达到最高迭代次数[10]或最佳值时,实现投篮机器人手臂运动轨迹的优化;如果没有满足上述条件返回(2)中,直到满足条件为止。以此,完成篮球投篮机器人手臂运动轨迹的优化控制。
5 实验与分析
为了验证篮球投篮机器人手臂运动轨迹优化控制方法研究的有效性,通过搭建图2所示篮球投篮机器人实验平台进行实验分析。本次实验篮球的重量在(605~595)g之间,测试所用篮球投篮机器人,如图2所示。

图2 篮球投篮机器人Fig.2 Basketball Shooting Robot
实验将角位移、角速度、角加速度、振动响应作为指标,采用篮球投篮机器人手臂运动轨迹优化控制方法与文献[3]方法、文献[4]方法和文献[5]方法实行对比测试。
5.1 角位移测试
采用所提方法、文献[3-5]方法对运动轨迹的角位移展开检测,如图3所示。
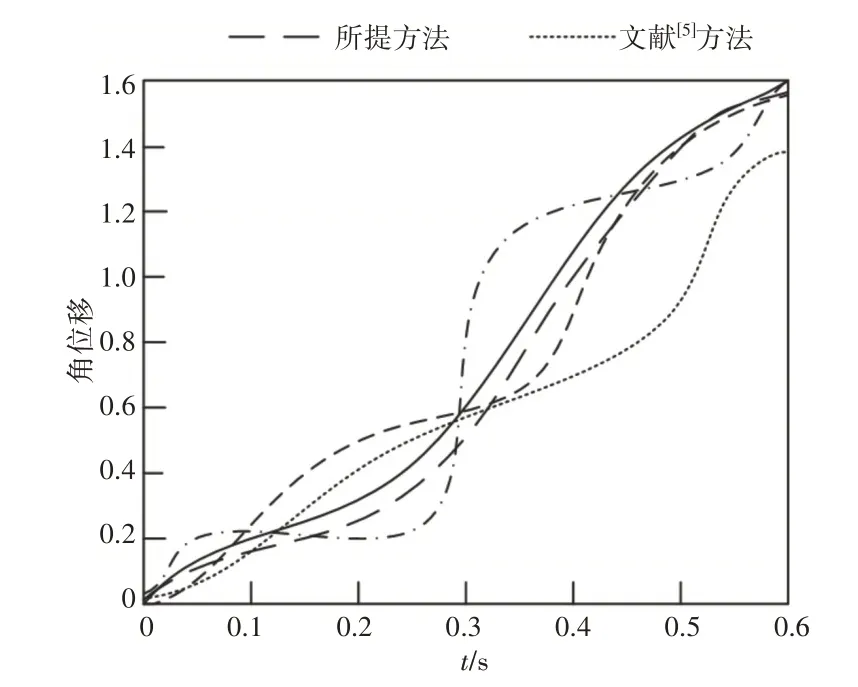
图3 各类方法运动轨迹角位移对比Fig.3 Comparison of Angular Displacement of Motion Trajectories of Various Methods
通过图3得知,在规定的时间内所提方法运动轨迹的角位移与最优轨迹的角位移最符合,文献[3-5]方法运动轨迹的角位移存在位置偏差,所提方法的运动轨迹角位移具有稳定性。
5.2 角速度测试
角速度是指在篮球投篮机器人手臂运动过程中关节的平均速度,各类方法的角速度对比测试,如图4所示。

图4 各类方法运动轨迹角速度对比Fig.4 Comparison of the Angular Velocity of the Motion Trajectories of Various Methods
由图4可知,文献[3-5]方法投篮机器人手臂运动轨迹的角速度均存在不稳定现象,而所提方法运动轨迹的角速度与最优轨迹的角速度基本一致。所提方法的运动轨迹角速度稳定。
5.3 角加速度测试
角加速度是机器人手臂的关节在运动过程中的平均加速度。各类方法关节角加速度测试,如图5所示。根据图5结果表明,所提方法运动轨迹的角加速度与最优轨迹的角加速度同步。其余方法均存在不同步等问题,所提方法运动轨迹角加速度稳定。
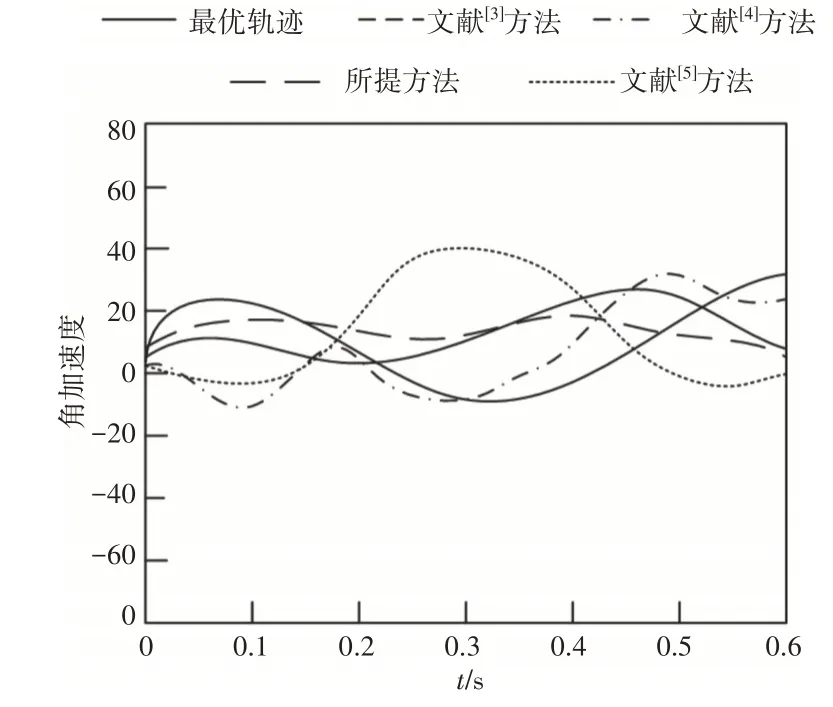
图5 各类方法运动轨迹角加速度对比Fig.5 Comparison of Angular Acceleration of Motion Trajectories of Various Methods
5.4 振动响应测试
振动起伏与传感器有关,各类方法在时间条件下的运动轨迹振动情况,如图6所示。

图6 各类方法运动轨迹振动响应对比Fig.6 Comparison of Vibration Responses of Motion Trajectories of Various Methods
由图6可知,随着时间的增加,各类方法运动轨迹均随之变化。文献[3-5]方法的传感器电压范围分别为(-6.5~10.5)V、(-7~12.5)V和(-9.5~9)V,而所提方法的传感器电压范围为(-7~9.5)V,小于对比方法的电压范围,稳定性更好。因为所提算法在机械臂运动中使用五次多项式插值函数,保证了投篮机器人手臂运动振幅起伏连贯稳定。
6 结束语
投篮机器人是近代自动控制领域出现的一项新技术,并成为现代运动机械制造的一个重要组成部分。因投篮机器人手臂运动轨迹在运动过程中存在角位移,角平均速度、角加平均速度、振动响应不稳定等问题,为此提出篮球投篮机器人手臂运动轨迹优化控制方法研究。该方法构建投篮机器人手臂模型,在此基础上规划手臂运动轨迹,最后结合粒子群优化篮球投篮机器人手臂运动轨迹。保证了运动轨迹角速度、角加速度、振动响应的稳定,减少了角位移的不稳定情况。提升了机械臂轨迹优化技术,可更广泛应用在智能自动化领域。