高温涡轮叶片变形重构研究
2024-02-29李恒春位燕辉
魏 莉,李恒春,位燕辉
(1.武汉理工大学机电工程学院,湖北 武汉 430070;2.湖北省数字制造重点实验室,湖北 武汉 430070)
1 引言
高温涡轮叶片主要应用于汽轮机或航空发动机,在这些场合工作的涡轮叶片处于高温高压的环境中,同时,涡轮叶片的转速可高达数万转每分钟,承受离心力及其弯矩、热应力等复杂的应力,工况恶劣[1]。
目前对于高温涡轮叶片进行的研究主要为设备的健康运行状况[2]、相关传感器的运用[3]、振动状态的分析[4]以及气路状态的监测[5]等方面,其中常用的传感方式主要包括电阻应变片、压电敏感元件、热电偶、电涡流传感等[6]。
得益于FBG传感器抗电磁干扰、重量轻、对叶片运行状态影响最小,耐高温且便于组网等独特的优势,光纤光栅传感技术应用于基于应变信息的结构变形监测已被广泛研究与应用,并提出了逆向有限元法、模态转换法、KO位移理论和结构曲率算法等变形重构方法[7]。
在进行结构的变形重构时,逆有限元法不需要知道结构的相关材料信息及载荷状况,但需要依据结构的三维模型进行,计算量大,不适用于复杂结构的变形检测;模态转换法可利用少量测点位置的应变信息得到结构的变形情况,但对传感器的布点及结构的材料属性描述有严格要求;结构曲率法和KO位移理论适用于复杂结构的变形重构,原因在于它们在没有三维模型、结构材料信息和外界载荷状况的情况下即可实现对结构的变形重构,但结构曲率法一般用于较大面积的柔性板结构,KO位移理论中传感器的数量在一定程度上会影响结构的测量精度。高温涡轮叶片工作场合不一、形状各异、材料不同,根据各变形重构算法的特点,在进行高温涡轮叶片变形重构时,KO位移理论具有极强的适用性。2009年,文献[8-10]提出了KO位移理论,该理论将梁形结构分段线性,在每一分段上假设其变形为线弹性小变形,从而得到结构整体的变形信息,目前该理论已运用到变截面梁、简支梁、楔形简支梁等不同结构及不同载荷形式上。
这里针对航空发动机、燃气轮机等高温涡轮叶片变形监测的需求,以KO位移理论为基础,采用光纤光栅应变传感系统测得叶片表面应变,重构测点处的变形,并将实验结果与仿真结果和接触式位移传感器测得的变形进行了对比,证实了FBG传感器测量高温涡轮叶片应变信息及利用变形重构算法重构叶片变形的可行性,进而为高温涡轮叶片的健康监测以及故障预测等提供参考。
2 高温涡轮叶片变形分析
叶片工作时,作用在叶片上的力主要有两种:一是由于涡轮叶片自身质量和围带、拉金质量的存在,在高速旋转时会产生离心力,离心力在叶片中不仅产生拉应力,而且会因偏心拉伸的存在产生弯应力;二是气流作用在叶片上时,会对叶片冲击而产生弯曲应力;离心力和气流力也可能会在叶片工作时产生扭转应力;此外,叶片受热不均匀也会引起热应力;在一般情况下,扭转应力和热应力的数值都较小[11]。
这里对等截面直旋转叶片进行研究,简化旋转叶片模型,分析叶片应变和变形之间的关系,并由测得的应变重构叶片变形。高温涡轮叶片一般设计为薄壁件,工作时叶片变形较大,而轮毂变形很小,因此可将叶片视为绕中心刚体旋转的等截面梁。叶片在静止状态时没有离心力的作用,可将叶片在旋转状态时流体的作用力简化为集中力的作用,此时可将叶片与轮毂可简化为等截面悬臂梁模型。
气流对叶片作用力的方向基本上沿着叶片截面刚性最小的方向,即对叶片在叶轮平面内进行冲击产生弯曲振动,此方向上最危险且最容易发生变形;而叶片在轴向方向上的刚度非常大,往往产生会低阶的振动,不易使叶片发生变形;此外,在较长的叶片上,常常会出现叶片在长度方向上的扭转变形。
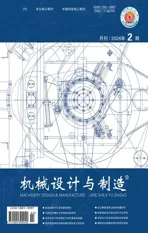
高温涡轮叶片根部固定而端部自由,因此通过叶端和叶边的位移来反映叶片的变形,叶端的位移体现叶片的弯曲变形,叶边的位移体现叶片的扭转变形,所以叶片的变形一般可分为:弯曲变形、扭转变形和弯扭复合变形,如图1所示。
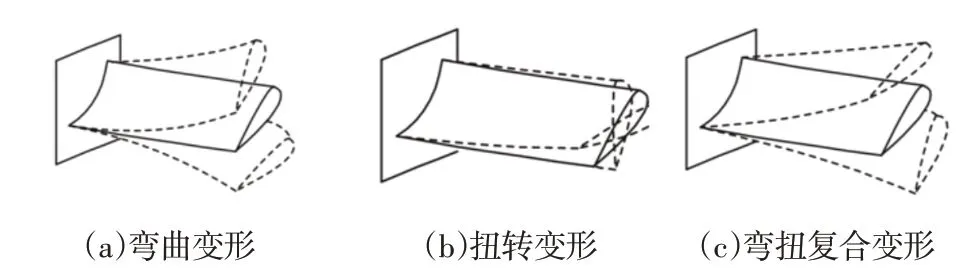
图1 叶片变形的一般形式Fig.1 General Forms of Turbine Blade Deformation
3 变形重构算法
3.1 弯曲变形的KO位移算法
当梁结构受到弯曲载荷时,其微分方程为:
式中:x—结构长度;y—测点位置处的挠度;M(x)—结构所受弯曲载荷;E—材料弹性模量;I—x位置处梁截面的惯性矩。假设在x位置梁表面到其中性面的距离为c(x),弯曲应变为ε(x),则结构的微分方程可以表示为:
假设梁结构长度为l,在其长度方向上均匀布置n+1个应变传感器,每两个传感器之间的长度为Δl(Δl=xi-xi-1),在Δl足够小的情况下假设应变ε(x)在各段长度Δl内为分段线性函数,那么,在两个相邻的传感器之间的区域(xi-1,xi)内:
3.1.1 斜率方程
对悬臂梁来说,在(xi-1,xi)区域内,其轴向斜率可对式(2)进行一次积分得到:
式中:tanθ(x)—xi位置处的斜率值。则:
当结构的厚度满足ci-1=ci=c时,均匀悬臂梁的斜率公式为:
3.1.2 挠度方程
对式(5)进行一次积分,可得在(xi-1,xi)区域内,非均匀直悬臂梁在x位置处结构的位移函数y(x):
式中:yi-1—xi-1处应变位置的挠度
随着梁的非均匀性减小,当ci-1=ci=c时,均匀悬臂梁的表达形式为:
式(8)明确地表明,应变传感器xi处的挠度yi可以仅通过将当前应变传感器xi处的应变(ε0,ε1,ε2,…,εi)相加得到。
对于悬臂梁结构,其固定端位移及斜率均为0,有tanθ0=y0=0;
光纤光栅传感器处于工作状态时,会同时受到温度与应变的共同作用,为消除温度的影响,在同一传感结构中采用两种作用的光纤光栅,一种光纤光栅用于感知应变但同时会受到温度影响,另一种光纤光栅在测量过程中仅受到温度的影响,可得到待测点的真实应变为:
式中:λB—FBG的初始中心波长;ΔλB—受到温度及应变作用时的波长漂移量;α—光纤的热膨胀系数;η—光纤的热光系数;Pe—有效弹光系数。
将得到的真实应变值分别代入式(8)中即可对高温涡轮叶片的变形进行重构计算。
3.2 扭转变形的KO位移算法
在梁结构两边各布置一传感器阵列,分别得到梁结构在两侧边位置处的弯曲变形,如图2所示。
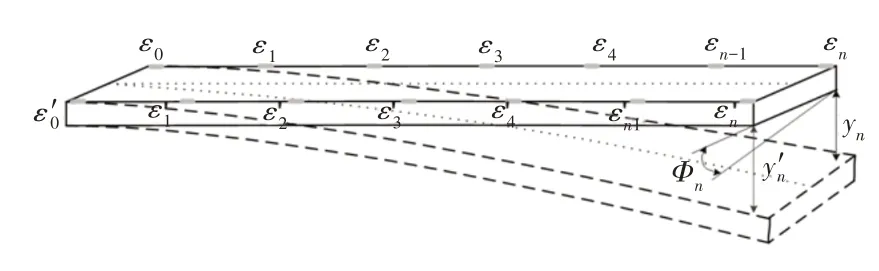
图2 等截面梁的应变测量原理图Fig.2 Strain Measurement Diagram of a Constant Section Beam
假设传感器路径1测量得到的应变数据为εi,传感器路径2测量得到的应变数据为ε'i,通过挠度公式可得到前后梁的位移,分别为yi、y'i,则叶片xi位置处横截面的扭转角可以表示为:
由式(10)可知,根据结构在路径1与路径2上的弯曲变形情况便可得到结构的扭转变形。
对于叶片的等截面悬臂梁模型,可通过将叶片的几何参数和弯曲应变数据输入挠度方程计算叶片的挠度,因此,不需要知道叶片的抗弯刚度EI就可以得到叶片的整体变形信息。
4 重构算法实验
4.1 平台搭建
增加传感器的数量可以提高KO位移算法变形重构的精度,受限于光纤光栅栅区的长度,在空间有限的叶片表面布置传感器数量;光纤光栅的波分复用技术可实现光纤光栅在单根光纤中依次排列,从而获得多个待测参量的应变值。
叶片布点及坐标建立,如图3所示。高温涡轮叶片为等截面结构,长180mm,宽为100mm,为自由叶片,一端固定,一端悬空,上下表面最厚为2.91mm,最薄为1mm,叶片材料为45钢,在进行ANSYS分析时设置该材料的弹性模量为210GPa,泊松比为0.3,密度为7850kg/cm3,热膨胀系数为(1.2 ×10-5)℃-1;设路径1 为FBG1、FBG2、FBG3 和FBG4 组成的光纤串,路 径2 为FBG5、FBG6、FBG7和FBG8组成的光纤串。

图3 叶片布点及坐标示意图Fig.3 Diagram of Blade Distribution Points and Coordinates
4.1.1 常温下的实验方案
设置固定约束为叶片外的部分,分别对叶片的侧边、另一端、一端及侧边和端点施加载荷,分别用来模拟叶片在工作时受到的扭转载荷、弯曲载荷、弯扭组合载荷及集中载荷,如图4所示。每个箭头代表加载2N,其中在端点加载的集中载荷为6N。

图4 叶片不同负载的加载形式Fig.4 Loading Modes of Turbine Blades with Different Loads
在ANSYS中输出变形图,由仿真分析图可得到叶片在每个方向上的最大变形,如表1所示。无论何种载荷下,叶片的变形主要反映在垂直于叶片表面上,即z方向的变形,其他方向的变形很小,可忽略不计。
表1 常温载荷下,叶片仿真各方向的最大变形Tab.1 Under Normal Temperature Load,the Maximum Deformation of the Blade in Each Direction
按图2所示布点位置粘贴光纤光栅,将叶片固定在支架上,施加不同的载荷,并利用FBG解调仪采集光纤光栅的波长数据,实验实物图,如图5所示。
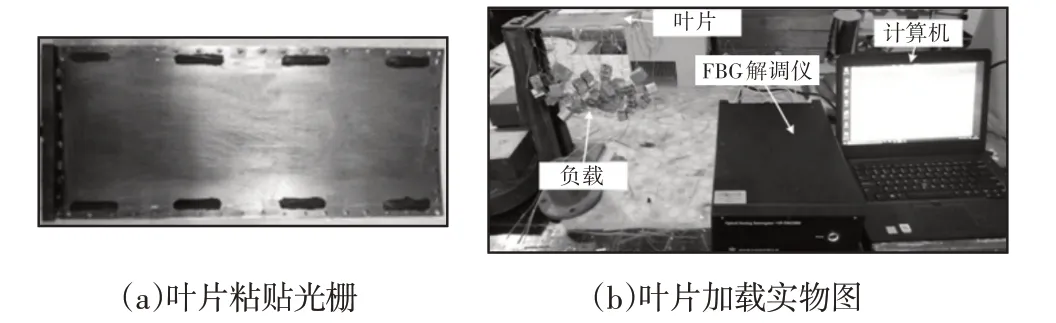
图5 常温下叶片施加载荷Fig.5 Applied Blade Load at Room Temperature
同时,为验证光纤光栅采集数据的合理性,采用基恩士接触式位移传感器(GT2-PA12K,分辨率0.1μm,精度1μm,测量范围12mm)对叶片粘贴光纤光栅位置处进行变形测量,测量实物图,如图6所示。
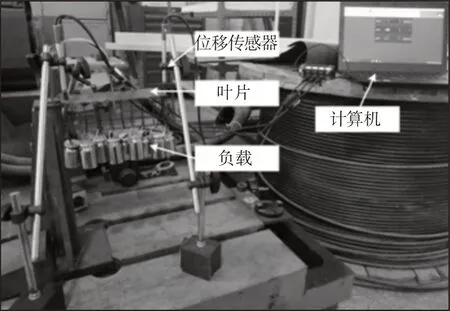
图6 接触式位移传感器测应变实物图Fig.6 Strain Measurement by Contact Displacement Sensor
4.1.2 高温下的实验方案
涡轮叶片的工作环境可达上千摄氏度,但因为冷却装置的存在,叶片的实际承受温度要比工作环境低,结合实验条件,采用500℃作为实验的环境温度;利用ANSYS有限元分析叶片在温度载荷与受力载荷共同作用下的变形,求得叶片在500℃环境下分别施加扭转载荷、弯曲载荷、弯扭组合载荷及集中载荷的变形情况。
在仿真分析中,叶片在xyz三个方向上的最大热膨胀变形分别为1.0368mm、0.2304mm、0.0168mm,根据仿真结果,叶片在减去热膨胀变形后所得为叶片的位移变形,如表2所示,z向变形依旧为主要变形。

表2 500℃载荷下,叶片仿真各方向的最大变形Tab.2 Under the Load of 500℃,the Maximum Deformation of the Blade in Each Direction
高温环境对光纤及粘接剂提出了苛刻的要求,因此需要采用相应的耐高温光纤及耐高温胶。带有聚酰亚胺涂层的光纤具有优良的高温衰减特性,可在(-50~+430)℃的温度环境下工作;同时Durabond公司生产的952胶可适用于1100℃的环境,在950系列的高温胶中,952具有更小热膨胀系数与较大的粘贴强度。将叶片及不同负载放入高温炉中,光纤从高温炉中引出连接到解调仪上,将高温炉进行升温,记录高温炉在室温到500℃升温过程中叶片上各光纤光栅中心波长的变化,实验实物图,如图7所示。
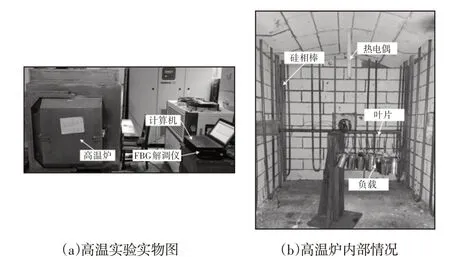
图7 高温实验实物图Fig.7 Physical Picture of High Temperature Experiment
4.2 重构实验结果分析
得到应变的点数越多,得到的变形精度越高,所得图形也越光滑。受限于FBG测点长度,FBG的点数反映出的应变点数依旧偏少,因此采用三次样条函数插值得到尽可能多的应变值,提高变形重构算法的精度。在叶片粘贴光纤光栅位置处可得到各点应变值,同时ANSYS仿真结果中,亦可得到各点的应变值,将各点的应变值代入变形重构式(8)中,得到路径1与路径2上重构出的变形;将两种方式重构出的变形值与ANSYS仿真的变形值和接触式位移传感器采集到的变形值进行对比,叶片路径1变形结果,如图8所示。在500℃高温下,接触式位移传感器等其他电子类传感器已无法使用,因此利用光纤光栅测量叶片应变值进行变形的重构,同时对ANSYS仿真得到的应变值进行变形重构,将两者重构后的变形结果与ANSYS仿真得到的变形值进行对比,叶片变形情况,如图9所示。
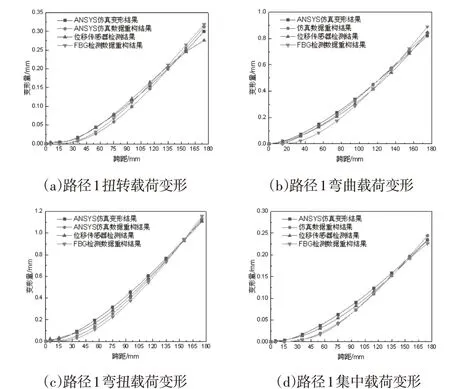
图8 常温下叶片施加不同载荷时的弯曲变形情况Fig.8 The Bending Deformation of Blades Under Different Loads at Room Temperature

图9 500℃下叶片施加不同载荷时的弯曲变形情况Fig.9 The Bending Deformation of Blades Under Different Loads at 500℃
FBG的重构结果与ANSYS仿真应变的重构结果较为吻合,相对误差最大为:常温下4.67%,500℃高温下7.19%;位移传感器检测叶片变形结果与ANSYS仿真叶片变形结果重合度较好,相对误差最大为12.33%。利用重构公式得出的变形值在前段小于仿真结果,原因在于重构计算过程中都假定初始点的变形量为0,而仿真过程中在初始位置也具有变形量,会引入相应的误差;在后段,利用重构公式得出的变形值大于仿真结果,原因在于重构公式会将误差进行累积,因此最终导致误差偏大。因为叶片的受力变形主要为弯曲变形,扭转角度较小,因此在计算时容易产生较大的偏差;同时叶片在发生扭转变形时,属于“约束扭转”,叶片相邻两截面间的翘曲程度不同,会产生附加正应力,因此在计算总变形时存在一定偏差,但对叶片的变形监测依旧具有指导作用。这里路径1的结论同样适用于路径2,实验及仿真分析过程中,在路径1及路径2上采集应变时,位置无法保证在同一点,因此会产生一定的误差;由实验与仿真结果对比分析可知,通过KO位移算法可以估计涡轮叶片的变形,吻合度较好,虽然实验与仿真结果存在一定的误差,但通过校准,可以以较高精度估计涡轮叶片的变形。
5 结论
为保证叶片类设备的安全运行,这里采用基于应变信息的变形重构方法,得到叶片的变形信息。文中分析了高温涡轮叶片的变形形式,通过简化叶片模型,进行叶片在不同负载下的有限元仿真分析,采用波分复用技术,在叶片长度方向上尽可能多地布置光纤光栅,并采用三次样条插值对应变进行插值,在较小的叶片上得到尽可能多的应变值,提高叶片变形重构的精度;在高温环境中,采用带有聚酰亚胺的耐高温光纤及952耐高温胶进行应变信息采集。实验结果表明,KO位移理论对高温涡轮叶片重构的变形与ANSYS仿真分析的变形具有较强的一致性,因此可采用FBG测量应变对高温涡轮叶片进行变形重构,对叶片的安全运行具有重要的意义。