货运索道自动化路径选择及结构设计研究
2024-02-29张飞凯李其莹
刘 晨,秦 剑,张飞凯,李其莹
(1.中国电力科学研究院有限公司,北京 100055;2.国网山东省电力公司,山东 济南 250001)
1 引言
架空输电线路施工专用货运索道(以下简称货运索道)具有结构简单、操作简便、地形适应能力强、运输工效高、受外部环境影响小等优点,对自然环境破坏小,是山区机械化物料运输施工的重要装备[1-2]。
传统索道路径规划工作主要包括图上选线、收集资料、现场初勘、规划方案、终勘选线、方案审核等。索道路径规划工作主要由人工采用现场勘测方式进行,由于输电线路沿线覆盖面积大,存在路径规划周期长、人工成本高等缺点。索道路径规划需充分考虑地理信息对山区物料运输的科学性和经济性的影响,涉及多目标决策问题[3-7],对施工技术人员技术能力要求高,实现难度大。另外,货运索道部件受力复杂,而且各部件受力存在联动性,受地形参数影响极大。目前施工单位对部件的选型计算也多依靠简化算法,忽略了运行过程中产生的部件受力状态变化,导致支架、鞍座等关键部件的选型不合理[8-10]。
因此为提高索道架设质量,保证工期进度,实现索道架设投资可控,减少对环境的影响,利用地理信息系统(Geographic Infor‐mation System,简称GIS),提出可自动适应地形的货运索道中间支架自动选取方法,实现货运索道规划路径选取,结合输电线路货运索道结构设计计算方法,实现标准化部件选型,进一步减轻索道设计难度,提高索道运输的经济效益和社会效益。
2 输电线路货运索道
货运索道由工作索系统、支架系统、运行小车系统、驱动系统、地锚系统等多个系统组成。工作索系统由钢丝绳实现各功能,主要包括承载索、返空索、牵引索。承载索主要承担物料的重力,牵引索拖拽运行小车行进,返空索与牵引索配合实现运行小车的循环运动。支架系统通过支架使工作索脱离地面、保证运行小车安全通过、分担工作索压力。支架系统由支腿、横梁、鞍座、转向滑车等组成。货运索道主要部件,如图1所示。

图1 货运索道主要部件Fig.1 Main Components of Material Ropeway
输电线路中货运索道主要采取循环式单跨或多跨架设方式,如图2所示。根据承载索数量,可分为单索、双索、四索货运索道等类型。
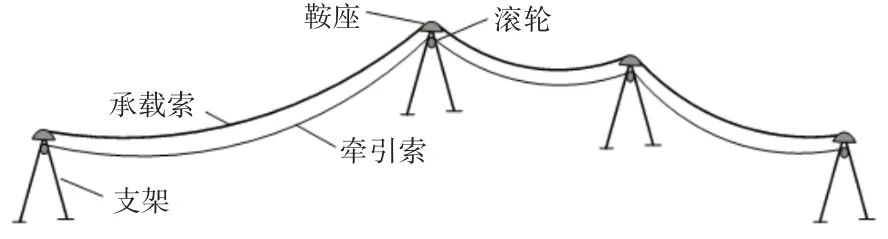
图2 3档货运索道Fig.2 Material Ropeway with 3 Span
3 基于GIS平台的索道路径选择
3.1 GIS平台
依托于GIS平台,通过高清晰航摄影像数据,利用GPS测量及图解空三方式构建立体模型,集成输电线路设计信息、DEM、道路、坡度、外业调绘等信息,使技术人员在逼真的立体环境下以最直观的方式综合考虑道路、装货点、卸货点、索道架设条件等多方面的因素,完成索道架设方案的规划选择,GIS平台,如图3所示。
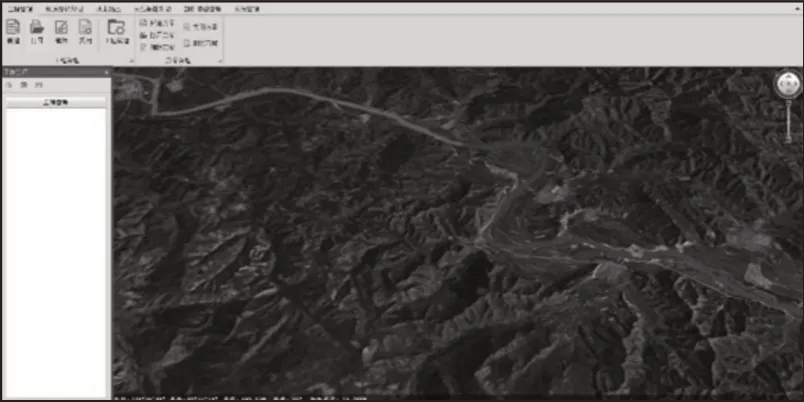
图3 GIS平台Fig.3 GIS Platform
如图4所示,通过观察杆塔附近地形,在GIS平台中可获得适宜的装货点和卸货点,并取得地形平断面信息,为索道路径选择提供地理信息数据。

图4 索道装货点、卸货点二维地形平断面Fig.4 Two-Dimensional Terrain Profile of the Loading and Unloading Points of the Material Ropeway
3.2 架设点选取
路径选择方法中的关键环节为货运索道中间支架位置的选取,需要在地形平断面曲线上获得可满足索道架设、运输要求的支架,保证货物顺畅通过各个支架而不与地面发生接触。
在此,提出了一种货运索道中间支架自动选取方法,可自动适应各种地形变化。
首先分别以装货点和卸货点正上方的某位置作为索道承载索的起始端和末端,建立承载索构型,此时承载索构型与二维地形平断面曲线无干涉点(承载索构型高于地形平断面曲线且两者间最小距离大于1m);然后通过向下移动承载索构型起始端和末端来控制单跨索道的承载索构型向二维地形平断面曲线靠近;在此过程中,每当承载索构型与地形平断面曲线产生干涉时,在干涉点处增设一个中间支架,该支架可帮助索道承载索构型适应地形平断面曲线,阻止承载索构型与地形平断面曲线发生干涉;当承载索构型起始端和末端分别与装货点和卸货点重合时,即可完成中间支架的搜索。货运索道中间支架自动选取过程,如图5所示。

图5 货运索道中间支架自动选取过程Fig.5 Automatic Selection Process of Intermediate Trestle of Material Ropeway
(1)将装货点和卸货点分别记为点a和点d,分别以点a和点d为起始端和末端建立索道承载索构型;如果该承载索构型与地形平断面曲线不干涉,那该索道仅需在起始端和末端位置架设支架,无需额外架设中间支架;如果干涉,控制点a和点d同步上移,直至承载索构型与地形平断面曲线有且仅有一个干涉点。
(2)将该干涉点记为点b和点c,同时在此处设置中间支架,原承载索构型ad被该支架分割为两条新的承载索构型ab和cd。以微小的步长同步向下移动点a和点d,分别判断承载索构型ab和cd与地形是否干涉,依次找到它们的干涉位置1和2。
(3)依次将干涉位置1和干涉位置2重新记为点b和c,重复步骤(2),直至点a和点d与装货点和卸货点重合,可获取所有中间支架的位置。
索道支架间承载索可采用抛物线近似,可表示为:
式中:Z0—承载索构型上的点与曲线起始端的相对高度;X0—承载索构型上的点与曲线起始端的相对水平距离;l—承载索构型末端和起始端的相对水平距离;C—承载索构型的末端与起始端的相对高度;f—承载索构型的档中挠度,其取值范围为(0.05l~0.08l)。考虑承载索载重,取f=0.065l。
该方法以三维地理信息数据为基础,实现了货运索道支架架设点的自动选择,且架设位置可满足货物通行要求。
3.3 索道路径确定
索道路径主要依据架设费用确定。对于有不同装货点、卸货点形成的架设点方案,需开展多方案选比,分别通过索道支架规格型号及使用数量确定索道结构费用,通过GIS平台数据统计获得架设点处的土石方开挖量确定索道架设施工费用。根据各方案的经济性,最终确定索道路径选择结果。根据路径选择结果,结合索道周边地物及标绘情况,在GIS平台上确定索道各支架位置,完成索道路径在GIS平台上构建,如图6所示。
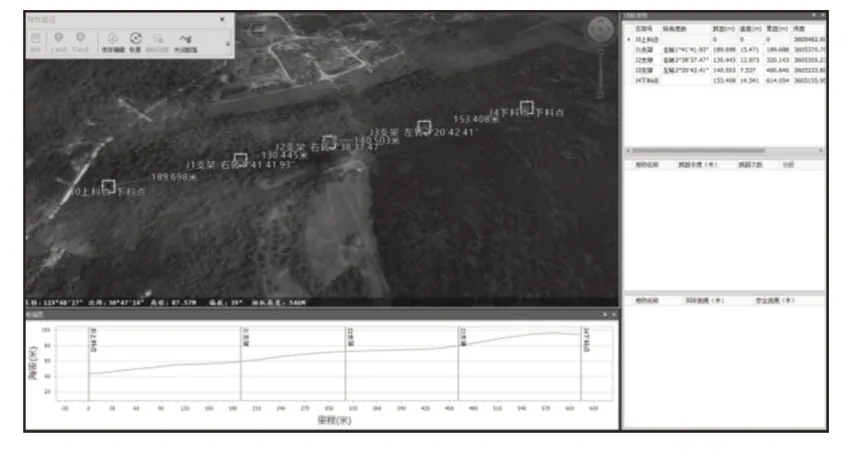
图6 索道路径选择功能界面Fig.6 Interface of Path Selection Function of Material Ropeway
4 货运索道结构设计计算方法
在货运索道结构设计计算中,需建立包含承载索和牵引索、承载索和载荷间结构连接的理论分析模型[11]。下面以多跨循环式索道为例进行说明。
4.1 索道基本设定
结合货运索道施工运输特点,对承载索、牵引索、鞍座、运行小车的结构进行如下设定:
(1)索道施工运输过程承载索和运行小车间保持接触状态。
(2)承载索与牵引索应力应变满足线弹性关系。
(3)承载索与牵引索被鞍座、载荷等分割为仅受重力作用的悬链线索段。
4.2 索道结构守恒
货运索道施工运输过程中,涉及与工作索结构相关参数无变化,建立如下方程:
(1)各跨高差和跨距守恒,即跨内承载索、牵引索各索段的高差、跨距之和与每跨两端支架的高差、跨距相等。
(2)各索段内的跨距及高差守恒。
(3)承载索长度守恒,即承载索的原始总长度始终保持不变。
(4)牵引索长度守恒。运输物料通过与牵引索连接实现牵引,牵引索段原始长度始终相同,如图7所示。

图7 载荷间牵引索Fig.7 Pulling Rope Between Loads
4.3 工作索张力平衡
4.3.1 承载索与运行小车
运行小车滚轮对承载索无轴向作用力,仅产生横向压力,故承载索在载荷两侧的切向张力相等。
4.3.2 承载索与鞍座
承载索可在鞍座上前后滑动或固定不动,鞍座两侧承载索切向张力差等于鞍座对承载索的摩擦力。可以建立鞍座两侧承载索张力差与摩擦力的平衡方程,如图8~图9所示。
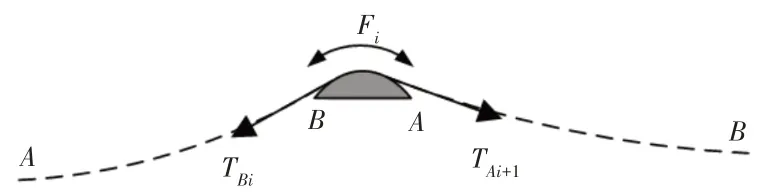
图8 承载索与鞍座摩擦示意Fig.8 Friction Between Carrying Rope and Saddle
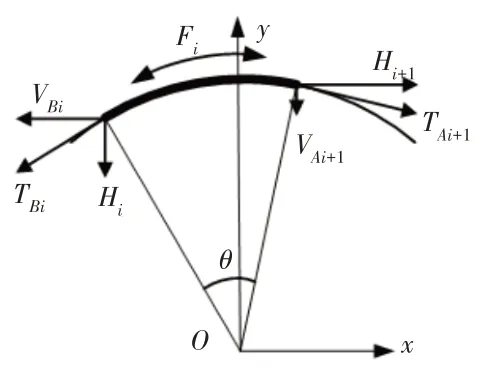
图9 承载索在鞍座上的摩擦力分析Fig.9 Friction Analysis of Carrying Rope on Saddle
当TBi-TAi+1>0时,摩擦力方向为x正方向,当TBi-TAi+1<0时,摩擦力为x负方向。因此,摩擦力可表示为:
式中:TBi—鞍座前承载索张力;TAi+1—鞍座后承载索张力;μ—摩擦系数;Np—鞍座所受载荷,等于平均切向张力和包角的乘积,即:
而包角θ为承载索与鞍座的接触段弧度:
式中:VBi—TBi在水平方向上的分力;Hi—TBi在垂直方向上的分力;VAi+1—TAi+1在水平方向上的分力;Hi+1—TAi+1在垂直方向上的分力。
4.3.3 牵引索张力平衡
牵引索在支架上的滚轮上窜动,忽略滚动摩擦力,认为支架前与支架后牵引索的切向张力相等。
4.4 结构耦合关联
运行小车与承载索、牵引索、载荷相连,而且会通过支架鞍座,是货运索道结构发生联动的核心部件,索道结构的耦合主要通过运行小车的力学平衡体现。
运行小车受承载索切向张力、两侧牵引索切向张力、载荷共同作用,如图10~图11所示。

图10 工作索与运行小车耦合关系Fig.10 Coupling Relation Between Working Rope and Running Car

图11 运行小车受力分析Fig.11 Force Analysis of Running Car
将各切向张力在水平方向及垂直方向进行分解,建立运行小车的力平衡方程如下:
式中:各变量中上标l—承载索;上标t—牵引索。
4.5 非线性计算方法
建立非线性方程组,计算方法见参考文献[11],通过求解该方程组,可计算索道设计部件选型数据。
通过将计算结果与工程试验中的实测数据对比表明,计算结果吻合良好,最大张力误差不超过2.5%,完全满足工程设计、分析需要,可有效解决货运索道的计算问题。
5 货运索道部件选型方法
结合货运索道结构设计计算方法获得索道运行过程中各部件最大载荷,在有限元软件中建立标准化部件模型,进行仿真计算得到部件极限载荷[12],根据以下公式,判断是否满足安全性能要求,可以实现货运索道各部件选型。
式中:σlim—索道部件极限应力;σmax—索道运行过程中部件最大应力;n—索道部件安全系数。
货运索道部件主要包括横梁、支腿、鞍座、运行小车、转向滑车。
5.1 部件受力分析
5.1.1 横梁
横梁结构形式有双工字钢、单工字钢、方钢管、H型钢等。货运索道施工运行过程中,横梁承受承载索下压力Fc、返空索下压力Fr,载荷位置分别位于1/3、2/3横梁长度处,横梁受力示意图,如图12所示。
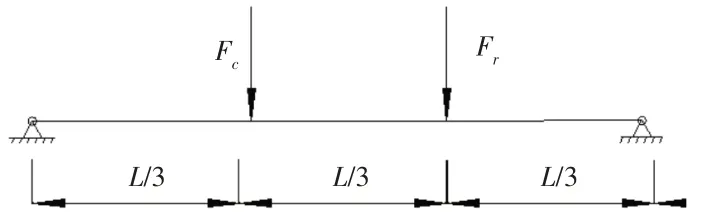
图12 横梁受力示意图Fig.12 Schematic Diagram of Force Analysis of Crossbeam
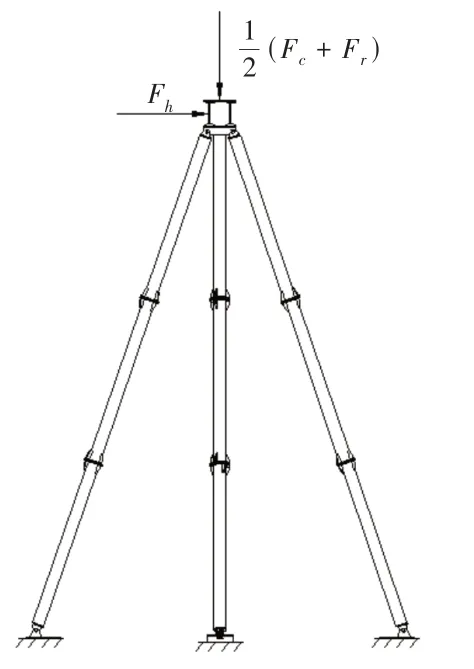
图13 支腿受力示意图Fig.13 Schematic Diagram of Force Analysis of Leg
5.1.2 支腿
支腿主要承受工作索对支腿的水平作用力和垂直作用力,以三支腿支架为例进行载荷分析,水平作用力Fh根据实际高差、跨距确定,垂直作用力为1/2(Fc+F)r,支腿受力示意图,如图12所示。
5.1.3 鞍座
鞍座结构形式有单索鞍座、双索鞍座、四索鞍座。实际使用中,由于鞍座支撑承载索的托索板可以绕轴转动,其承载力主要沿鞍座支架方向,水平力较小。鞍座承受承载索下压力Fc、牵引索下压力Fp,鞍座受力示意图,如图14所示。
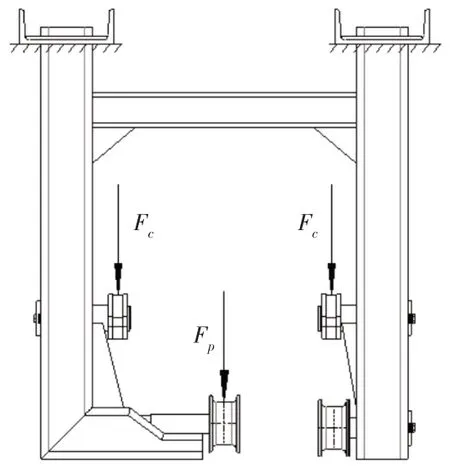
图14 鞍座受力示意图Fig.14 Schematic Diagram of Force Analysis of Saddle
5.1.4 运行小车
运行小车结构形式有单索运行小车(单轮、双轮)、双索运行小车、四索运行小车。运行小车主要承受运输物料载重,以双索运行小车运行为例,在滑轮处设置边界条件,在抱索器施加牵引索载荷Fp,在吊钩处施加物料载重Fg,运行小车受力示意图,如图15所示。
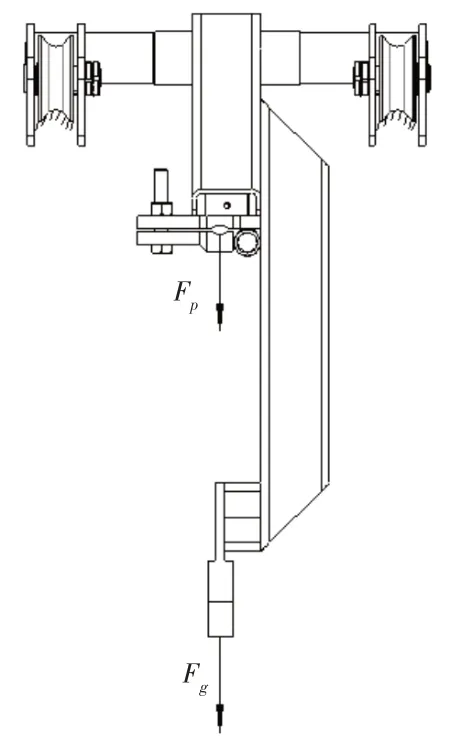
图15 运行小车受力示意图Fig.15 Schematic Diagram of Force Analysis of Running Car
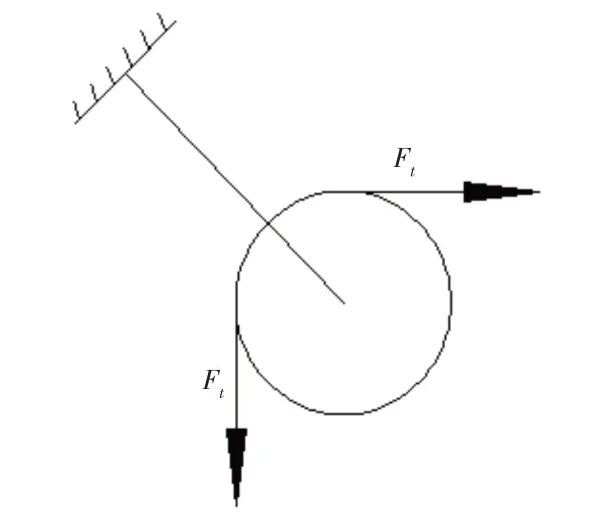
图16 转向滑车受力示意图Fig.16 Schematic Diagram of Force Analysis of Steering Pulley
5.1.5 转向滑车
转向滑车作为牵引索转角的导向装置,要求牵引索在滑轮上的包络角不得大于90°。转向滑车主要承受牵引索张力Ft,当包络角为90°时,转向滑车所受的承载力最大,受力示意图,如图19所示。
5.2 部件三维可视化展示
GIS平台采用3Dmax软件进行三维建模,通过LOD(Levels of Detail)技术完成在GIS平台上的三维可视化展示。根据部件选型结果,在GIS平台上完成索道部件模型的自动栽种,实现索道在三维场景中的可视化三维模拟,如图17所示。

图17 索道可视化三维模拟功能界面Fig.17 Interface of Visual 3D Simulation Function of Material Ropeway
6 索道工程设计案例
以某输电线路工程施工现场为例,根据现场实际地理信息数据,结合GIS 平台开展索道路径选取,对索道路径长度、支架数量、部件选型等进行索道设计,获得索道设计施工方案。
《架空输电线路施工专用货运索道施工工艺导则》(Q/GDW 1418—2014)4.2条规定了不同等级索道最大长度、最大跨距及最大弦倾角,依据标准对货运索道路径进行设计,索道架设设计原则,如表1所示。
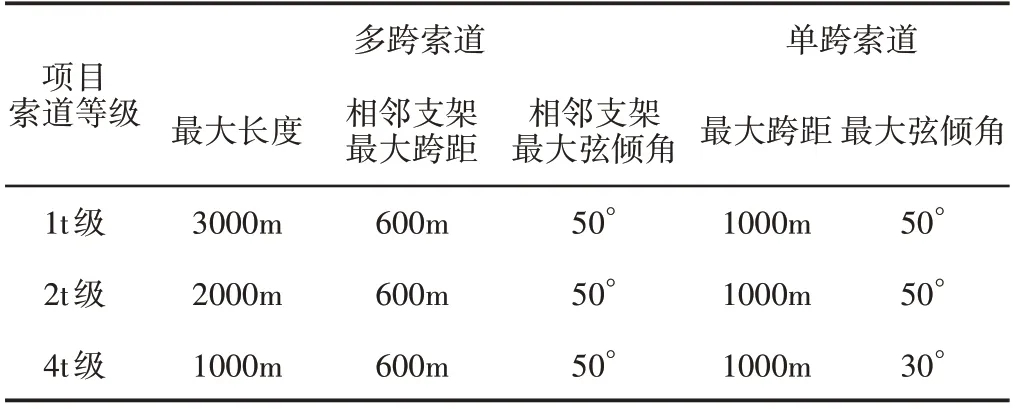
表1 索道架设设计原则Tab.1 Design Principles of Erection of Material Ropeway
根据施工需求,索道设计方案为:索道单件最大运载量为2t,索道形式为双索循环式索道。
根据GIS平台的塔位信息确定满足标准要求的索道跨距、高差,如表2所示。索道路径及支架坐标,如图18所示。根据参数比选,在该路径下,支架数量少、土石方开挖量小,符合工程设计要求。
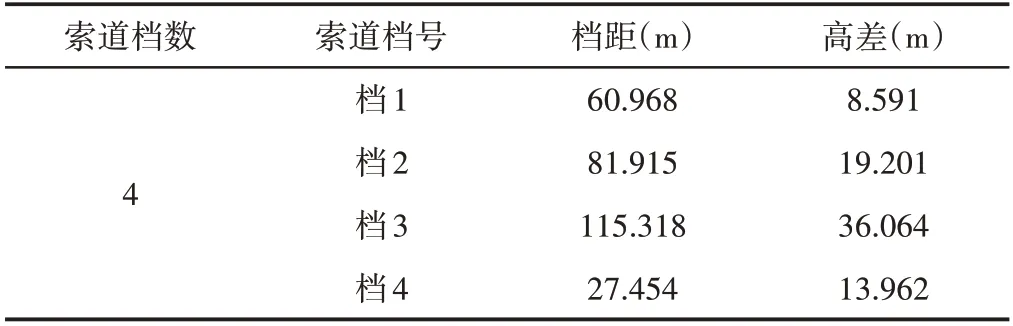
表2 索道架设参数Tab.2 Erection Parameters of Material Ropeway
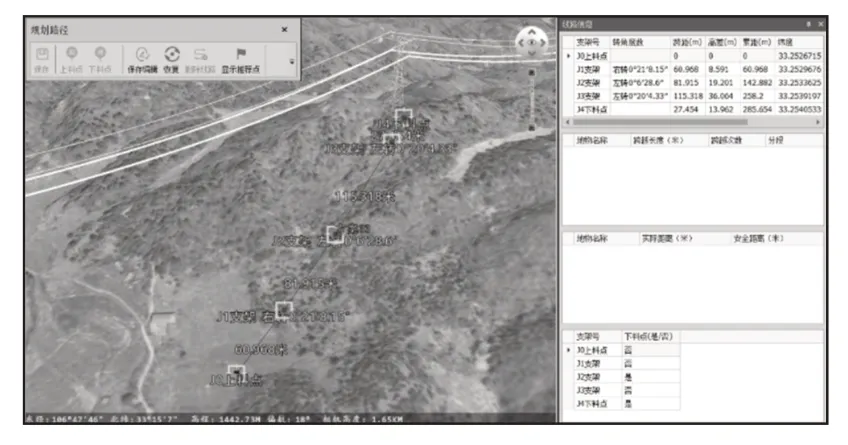
图18 索道路径选择界面Fig.18 Interface of Path Selection of Material Ropeway
根据索道结构设计计算方法得到索道索形计算结果,如图19所示。部件选型结果,如表3所示。部件安全系数均满足标准要求。

表3 索道部件选型结果Tab.3 Component Selection Results of Material Ropeway
7 结论
基于GIS平台,提出可自动适应地形的货运索道中间支架自动选取方法,实现可视化路径选择,结合货运索道结构设计计算方法,实现标准化部件选型,主要结论如下:(1)基于GIS平台,整合线路专题信息,通过观察杆塔附近地形,选取适宜的装货点和卸货点。提出可自动适应地形的货运索道中间支架自动选取方法,确定了索道支架位置,并结合GIS 平台,完成了索道路径选择,大大减少了现场勘查、测量工作量。(2)货运索道结构设计计算方法精确高效,实现了承载索与牵引索、承载索与载荷等多重耦合的分析计算,为索道部件选型提供更准确的参考数据。(3)根据索道结构设计计算结果,确定货运索道运行过程中各部件最大应力,获得部件安全系数,完成部件选型,基于GIS平台实现索道在三维场景中的可视化三维模拟。(4)根据工程实际地形,结合GIS平台实现了索道路径选取及结构设计,数据满足工程使用需求。
提出的方法解决了多跨索道路径选择的难题,实现了标准化索道设计,路径选择及部件选型结果可在GIS平台上实现三维模拟,便于架设布置分析、地面干涉判断,提高了货运索道设计效率,为山区复杂地形下货运索道施工提供技术指导。