基于沙漠治理智能小车的创新实验教学系统设计
2024-02-27李强徐伟谷永傲王鑫涛胡芃哲
李强,徐伟,谷永傲,王鑫涛,胡芃哲
(江汉大学 a.智能制造学院;b.工程训练中心;c.人工智能学院,武汉 430056)
0 引言
在高等教学教学改革中,培养具有创新精神和实践能力的高素质创新型人才是高等人才培养工作的重要任务。实践教学型人才培养模式是高校教育改革的重中之重,实践教学已成为高校人才培养的重要环节,可以激发学生学习兴趣、培养学生创新思维、团队合作以及解决实际问题的能力,打造知识、能力、素质协调发展的创新型人才。
本设计教学系统将学科竞赛和创新实践教学相结合,锻炼了学生学科知识综合实验应用能力。在深入解读大赛专题内容的基础上,本项目组成员选择用于修复自然生态的机械装置——防风固沙机械装置。沙漠化对农业的危害特别大,它破坏土地资源,导致水土流失,使可供农牧的土地面积减少,土地滋生能力退化,土地贫瘠。我国在治沙防沙方面主要采取的措施是通过铺设草方格、埋设防沙障等方式固定沙丘,防止沙漠进一步扩张。由于防沙治沙需要投入大量的人力、物力,尤其是很多工作需要手动完成,劳动量大,导致治沙工人数量增多,为了减少沙漠的扩大,亟需开发自动化电控化的治沙装置。
本文设计的作品属于防沙固沙装置,主要用于通过铺设石子方格作为防沙障,可以有效防止沙漠进一步扩张,如图1所示。

图1 石子方格防沙障
1 总体结构设计
防风固沙装置主要的机械装置是铺设草方格、植树造林、铺设砾石,该方面的设备用于开发设计投入生产的有:杨其随[1]设计的自动沙漠方格栽草机,该设备可以铺设长100 cm、宽100 cm、高10~20 cm的草方格,该设备技术完善,已投入使用。东北林业大学刘九庆[2]设计的一种间歇式造林大苗植树机,该设备针对大苗栽植,适用于多种地形条件,该设备也已投入使用。中国科学院寒区旱区环境与工程研究所的安志山[3]发明了一种砾石铺设装置,这种砾石铺设装置是通过砾石将砂砾进行稳固,这对于风力较小的地区能起到非常好的效果。该设计方案还有待完善,无法实现铺设自动化。综合分析文献资料项目组成员决定对砾石铺设装置进行重新设计研究,达到砾石铺设的自动化。在多次论证、咨询专家后确定设计模型,如图2所示,该模型以缩小2倍于实际机构的比例进行设计。该装置主要包括储料箱、接料板、推料板、驱动装置等结构。

图2 固沙装置小车模型
储料箱结构如图2所示,其底部为倾斜斜坡,并包括条形的出料口,储料箱底部有滑动板,靠电动驱动装置水平移动,达到开启关闭的目的。当推杆电动机拉动滑动板时,出料口打开,砾石落入接料板,电动机驱动蜗轮蜗杆,蜗轮带动两个驱动轮旋转,驱动轮的轮销插入推杆下端的销孔,带动推杆摆动,推杆上端的销孔和推料板销接触,使得推料板沿着双导轨做水平移动,其驱动装置如图3所示。最后将砾石推成条状推到沙漠表面。为了实现自动化运作,在机架下端增加四轮驱动,经仿真软件模拟小车完成一个工作循环后,石子成田字形排列。
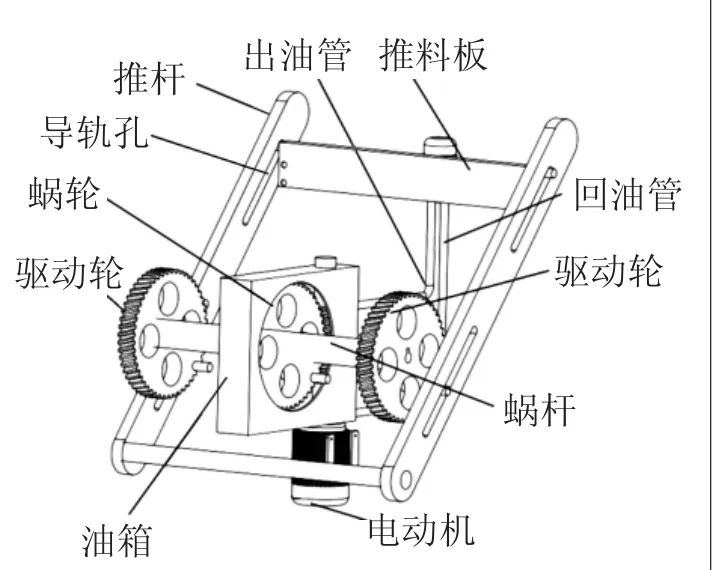
图3 驱动装置
2 机械部件模型设计
由机架、推料的尺寸,确定每次推板推砂砾2000 g,推杆施加在推料板上的力为100 N,假设砂砾在运动过程中匀速运动,速度为0.05 m/s。
2.1 推杆长度的计算
设定接料板的长度为300 mm,板下端至定位销所在水平线的垂直距离是200 mm,选定定位销距离接料板后端面垂线的距离是100 mm。由工作原理图可知,推杆在运动过程中有3个特殊位置,如图4所示。推杆在接料板的最右端;推杆运动到垂直位置(图中未标注),推杆运动到接料板的最左端。
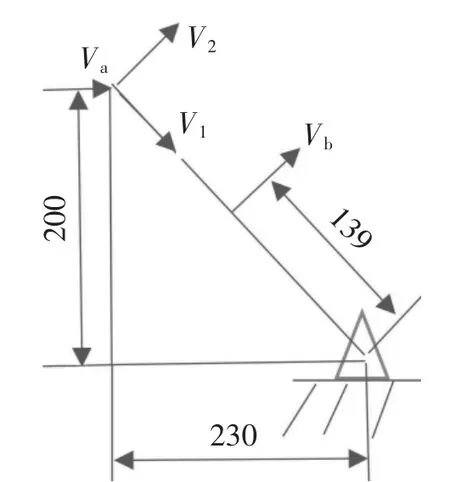
图4 推杆在左端的瞬时速度运动图
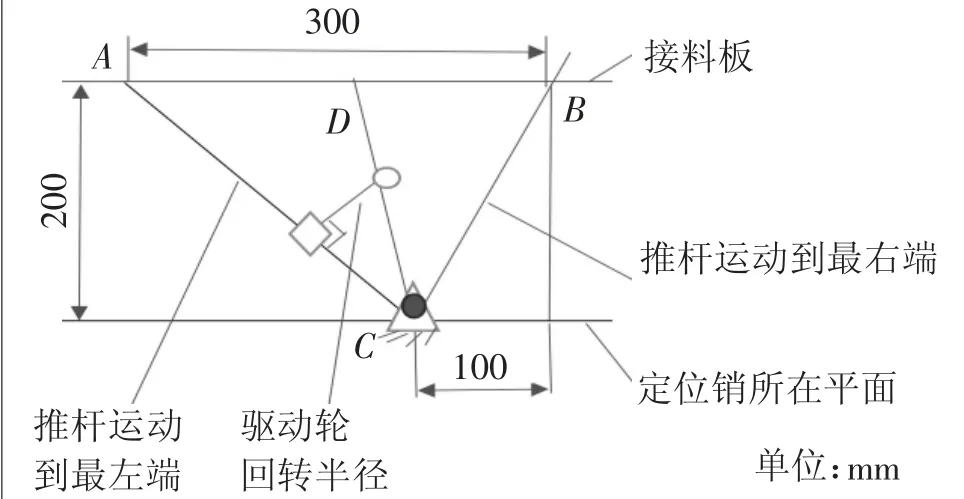
图4 推杆运动极限位置
当推杆在最左端时,计算得到推杆上销孔的上端至定位销的距离是305 mm。考虑两端的加工余量,得到推杆总长为330 mm。
2.2 驱动摇臂回转中心位置确定
驱动摇臂的回转中心在∠ACB的角平分线上,如图4所示,推杆运动到最左端或最右端时,驱动摇臂垂直于推杆。根据机架高度和定位销的位置,选取驱动摇臂回转中心距离机架底面的距离为80 mm。则计算得到点O到AC的垂距为42 mm。
2.3 推杆滑动销孔长度的计算
推杆上有上、下滑动销孔。关于上端销孔的长度计算,最高点设置在推杆运动到最左端时位置,当推杆在竖直位置时,也就是上销孔下端到支撑杆底部的距离为200 mm,计算得到上销孔的长度为105 mm,为了留出加工余量,上销孔定位为110 mm。
驱动轮上的推杆销和旋转中心的连线和推杆重合时,计算下销孔的长短。经计算得到下销孔长度为160 mm。推杆的设计结构如图5所示。
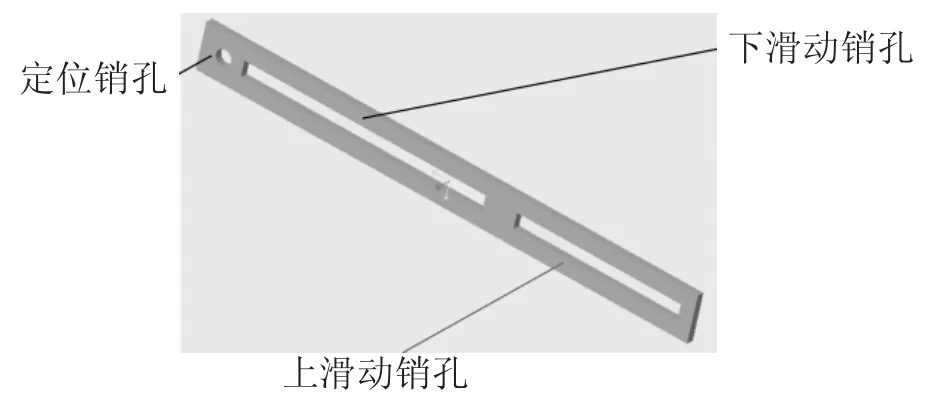
图5 推杆
2.4 电动机的转速和转矩的计算
选取蜗轮蜗杆传动比为45:1,对推杆进行受力和运动分析,计算电动机的转速及转矩。
1)推板受到的力为100 N,计算在起始位置时齿轮的转速。推杆的受力图如图6所示

图6 推杆受力分析图
根据力矩平衡方程式可以得到
由F2、驱动轮半径可以求得驱动轴的转矩为6.048 N·m,根据蜗轮蜗杆的传动比45:1,最终求得电动机的输出转矩为0.134 4 N·m。
2)推板的移动速度为0.05 m/s,设为Va,计算在初始位置时电动机的瞬时输出转速,图7所示为推杆的瞬时速度运动图。将Va分解为V1、V2,经计算得到V1为0.33 m/s。
根据动力学公式V=ω·r,可以得到线速度Vb为0.15 m/s,由线速度公式:V=D·π·n,求得齿轮的转速是0.6 r/s。由蜗轮蜗杆的传动比45∶1,可以得到电动机的输出转速是27 r/s。
2.5 机械部件模型的仿真分析
本模型的可行性分析是基于CREO4.0的机构运动仿真与分析。主要对受力件推杆的运动轨迹、速度和加速度进行运行动态分析。单击“机构”-“ 分析”(Analysis)-“ 机构分析”(Mechanism Analysis)来处理分析。推杆顶端的仿真曲线如图8~图10所示。

图8 推杆顶端运动轨迹曲线

图9 推杆顶端加速度曲线
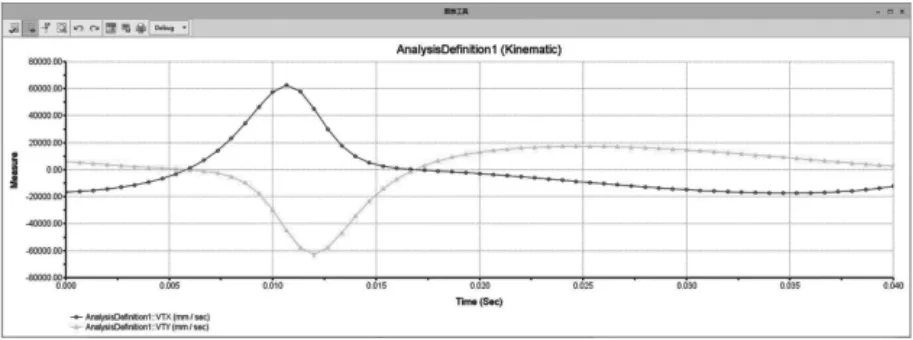
图10 推杆顶端速度曲线
经仿真分析,该机构可以运用于工程实际,曲柄连杆结构在运动过程中不存在干涉,为了解决死点的运动特性,选择飞轮代替曲柄销。
3 控制电路设计
本文设计的固沙装置,手持遥控装置实现石子方格的铺设,主要由电源系统、控制单元、信号采集系统、驱动电动机、无线通信系统和软件等组成[4]。控制原理图如图11所示。为了保证系统正常运转,电源电压采用12 V电源系统,车轮电动机、蜗杆电动机、推杆电动机都是属于12 V直流控制电动机,分别完成轨迹行驶、砾石铺设、漏斗落料3种动作。控制单元是电控系统的核心,将接受的外部触碰信号采集处理放大后,发出执行信号输入电压调节器,由电压电调器控制电动机的运转。手动遥控控制系统采用的是主控板叠加手柄扩展板形成一个无线遥控手柄,用于无线遥控。
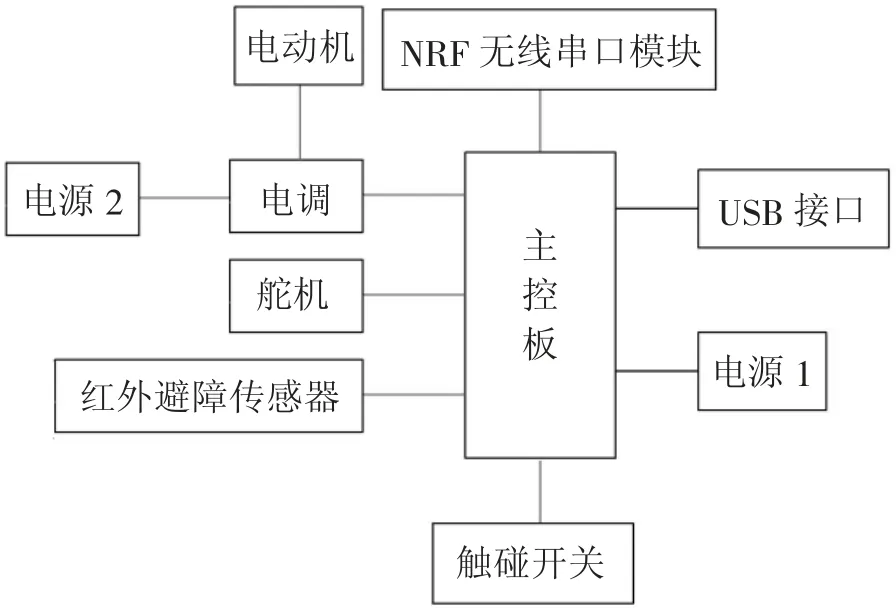
图11 固沙装置控制原理图
本微控制器编程使用Arduino编程语言(基于Wiring)和Arduino开发环境(以Processing微为基础)[5]。Arduino可以接收来自各种传感器的输入信号从而检测出运行环境,并通过控制光源、电动机以及其他驱动器来影响周围环境。本设计在防沙固沙装置工作过程的软件流程如图12所示。
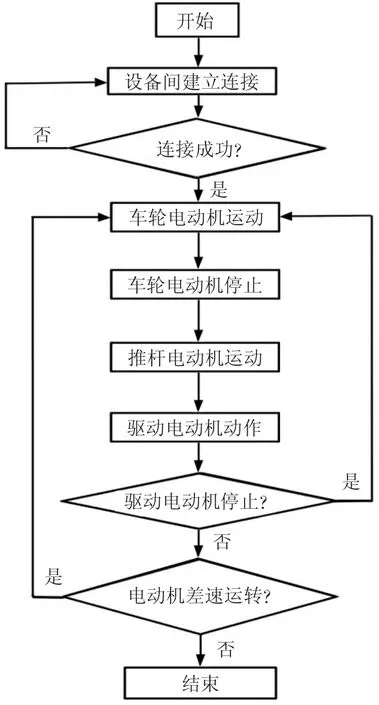
图12 固沙装置软件流程图
当按下遥控开关后,固沙车前进,到达适当位置,固沙车停止移动,驱动电动机驱动推杆转动,推料板将石子推下,固沙车继续移动400 mm,固沙车停止,驱动电动机动作,推板将石子推下。重复上述动作两次,然后车头旋转270°,重复上述动作,一个石子方格铺设完成,如图13所示。

图13 田字形砾石铺设
4 硬件选取
4.1 机械部件材料的选取
外围的框架结构选择了方铝管,铝管质量轻、耐腐蚀、不易氧化,并且成型性好。特殊凹槽设计与配套的压铸铝连接件可以任意组装成各种框架产品,且易于拆卸,十分方便。对于其他支撑材料,选用了具有很好的耐热性、抗冲击性、加工性的ABS板。
考虑到驱动齿轮、蜗轮蜗杆、传动轴、销轴需要起到抗弯、抗扭、抗压的作用,采用的是45钢加工而成,45钢是中碳结构钢,冷热加工性能良好,力学性能较好,具有更高的强度和抗变形能力[6]。
对于部分支撑部件(如接料板、漏斗、推料板等),考虑到承受力小,采用的是亚克力板,亚克力板属于一种有机玻璃材料。亚克力是由甲基丙烯酸甲酯单体聚合而成,或是亚克力粒料经由挤板机挤出而成,是有机玻璃的替代品,零部件采用激光切割和AB胶粘接的方式成型。传动机构的上下箱体、拨料板销采用PLA材料,通过3D打印成型[7]。
4.2 电控零部件的选取
驱动电动机、推杆电动机、控制单元等电控元件的型号如表1所示。
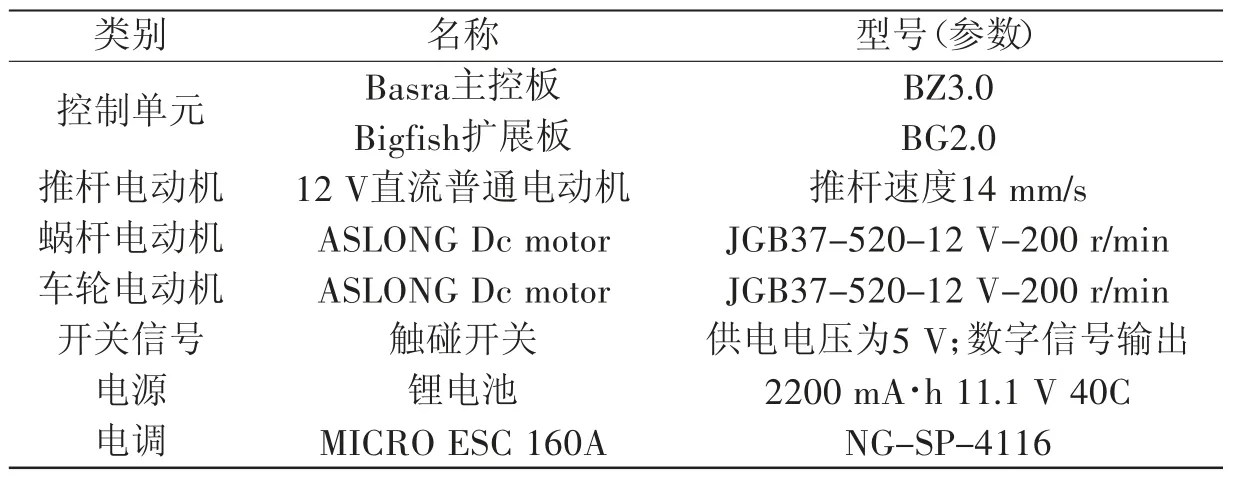
表1 电控系统选型
主控制器Basra是一款基于Arduino Uno开源方案设计的一款开发板。微控制器可以在Arduino、Eclipse、VisualStudio等IDE中通过C/C++语言来编写程序,编译成二进制文件,烧录进微控制器,如图14所示。

图14 主控制器Basra
扩展板Bigfish 为核心板主控制器Basra提供外围电路,可连接传感器、电动机、输出模块、通信模块等,如图15所示。主控制器Basra和扩展板Bigfish堆叠使用,如图16所示。

图15 扩展板Bigfish及针脚定义

图16 主控制器和扩展板堆叠图
车轮电动机和蜗杆电动机都是采用JGB520-37、12 V有刷直流电动机,如图17所示,此电动机体积小、质量轻、传动效率高、精度高,采用数字式控制,是当今较理想的调速电动机。此电动机的性能参数如表2所示。在理论计算中得到所需要的电动机转速和转矩,选择此电动机满足设计要求[8]。

表2 电动机参数

图17 直流有刷电动机
推杆电动机的作用是:定时地开启落料口,配合推料板完成砾石的铺设。本机构采用的推杆电动机额定电压为12 V,行程为70 mm,如图18所示。

图18 推杆电动机
电子调速器(英文名ESC),简称电调。针对电动机不同,可分为有刷电子调速器和无刷电子调速器。它根据控制信号调节电动机的转速。本设计中采用的电子调节器如图19所示。

图19 电子调节器
本系统采用的电源系统是锂电池,如图20所示。锂电池具有工作电压高、能量密度大、自放电率低、无记忆效应等显著优点。此电池的容量是2200 mA·h,最大放电倍率40C,额定电压11.1 V。

图20 锂电池
5 结论
本设计方案是在充分社会调研、论证的基础上设计开发的,是一款新型自动化沙漠治理机械,具有一定的使用价值。其创新点主要表现在如下方面:1)在结构上,传动机构采用蜗轮蜗杆传动,蜗轮蜗杆传动比大,降速增扭性能明显,传动过程中可省略减速装置,结构紧凑。传动平稳,冲击、振动、噪声小,而且蜗杆传动具有自锁性,无需考虑逆向传动问题。2)在控制方面,将智能系统安装在固沙车上,将运行路线、推料频率、落料时间输入控制铺设系统,该装置可自动完成砾石铺设。田字形的大小可通过调整程序进行修改。3)该装置解决了铺设过程中的压石问题,铺设间距设计合理,不会出现压石现象;同时调整结构尺寸可以实现砾石口字型、4个田字型、8个田字形排列。
该装置适宜在干旱地区退化植被的恢复重建中推广应用,在实现防风固沙目标的同时,避免或减轻了沙障固定桩和迎风网下的侵蚀,促进植被的恢复。同时,在一定的范围内,砾石固沙能在一定程度上维持调整生态的恢复力,且也不会对生态环境造成影响,通过砾石铺设在沙漠表层,可以起到比较好的固沙效果。对程序调整进行更改,还可以作为园林机械或者农业机械应用,如种料散播等可多用途使用。该装置可以用于机械工程专业、自动化专业的机械原理实验设备,可以开设综合性实验、验证性实验。
