下肢助行外骨骼结构设计与仿真分析
2024-02-27贾宁庭尚雅层来跃深常宏
贾宁庭,尚雅层,来跃深,常宏
(1.西安工业大学机电工程学院,西安 710021;2.西安北辰亿科电子科技有限公司,西安 710399)
0 引言
外骨骼机器人是补充和增加人的能力的机械系统,可以具体提供支持、保护、增强、信息交互等功能,其本质是一种可穿戴机器人。外骨骼机器人按照其结构可以分为上肢外骨骼、下肢外骨骼与全身外骨骼;按照其功能可以分为负载助力型外骨骼、医疗康复型外骨骼与运动助力型外骨骼[1]。其中,负载助力型外骨骼可帮助人体增强肌肉能力、减轻负荷,可应用于工业领域及军事领域;医疗康复型外骨骼可辅助肢体运动障碍患者进行康复训练,使患者恢复丧失的运动机能;运动助力型外骨骼介于负载助力型和医疗康复型之间[2],既可增强使用者肌肉能力,又可以为肌肉力量不足者提供辅助,可应用于身体机能衰退或不足以应付日常操作的健康人群的日常活动以及老年人的健康锻炼,为相应人群的日常生活提供便利。
下肢助行外骨骼作为一种辅助助力设备,其可穿戴性和移动性在辅助人体下肢进行正常、轻松的行走和辅助老年人、弱行动力人群以及需要为行走提供助力的人群行走方面具有独特的优势,可以发挥良好的工作能力。因此,下肢助行外骨骼设备的研究有着很好的研究前景和研究意义。
1 外骨骼结构设计
根据制定的下肢外骨骼设计方案,以人体髋关节以及腿部结构为研究参考,进行下肢助行外骨骼的机械结构设计。根据《中国成年人人体尺寸》[3]中的部分人体尺寸同时结合自身,使用SolidWorks软件对下肢助行外骨骼的各零部件尺寸进行设计。下肢助行外骨骼整体结构设计如图1所示,其设计细节如下。
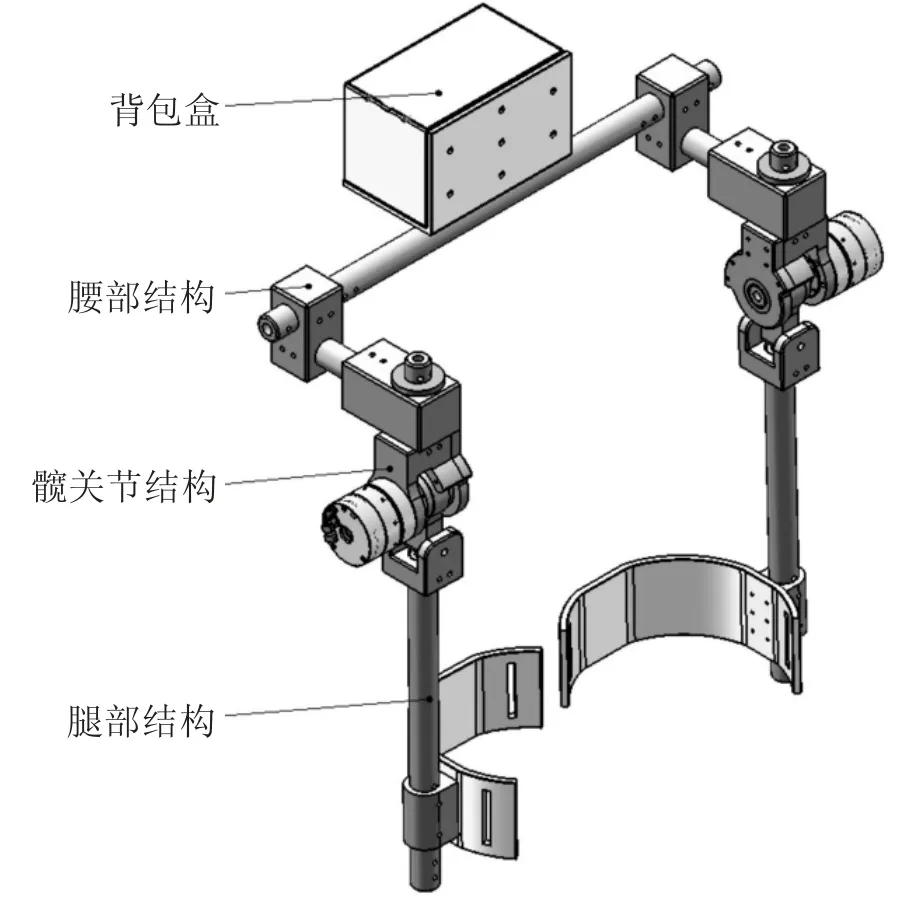
图1 下肢助行外骨骼设计结构图
1)背包盒部分采用ABS材料。背包盒盒体内部由隔板分为电池放置区域与主控板放置区域,其中电池放置区域用以放置给电动机和主控板供电的锂电池,主控板放置区域用以放置主控板等电子元器件。采用隔板将背包分割是为了保证不会因为穿戴者行走过程的晃动而使电池发生偏移并对电子元器件造成损坏。
2)腰部结构为铝合金材质。背部腰杆、侧面腰杆长度可调节,以适应不同体型人群穿戴。其中背部腰杆可调节范围为280~400 mm,侧面腰杆可调节范围为30~50 mm。
3)髋关节结构均为铝合金材质。单侧髋关节仿人体关节结构实现3自由度设计。其中旋内/旋外自由度以及内收/外展自由度为被动自由度,跟随人体运动,屈曲/伸展自由度为主动自由度,由电动机驱动。主动自由度设置有限位,限位范围为前屈90°~后伸50°。
4)腿部结构中腿部托板为ABS材质,其余零件为铝合金材质。腿部托板的高度也可调节,以适应不同穿戴者的大腿长度,其可调节范围为180~235 mm。
2 外骨骼建模与仿真
2.1 D-H参数建模
2.1.1 正运动学求解
由于下肢穿戴式外骨骼在结构上左右对称,因此在这里仅建立单腿运动学模型进行分析。所涉及的下肢外骨骼,单侧腿共有3个自由度,分别是髋关节的旋内/旋外、屈曲/伸展以及内收/外展,其中屈曲/伸展自由度为主动自由度。对下肢外骨骼单侧腿建立如图2所示的D-H坐标系。依据D-H坐标系所确立的各连杆的D-H参数如表1所示。

表1 下肢外骨骼D-H参数表
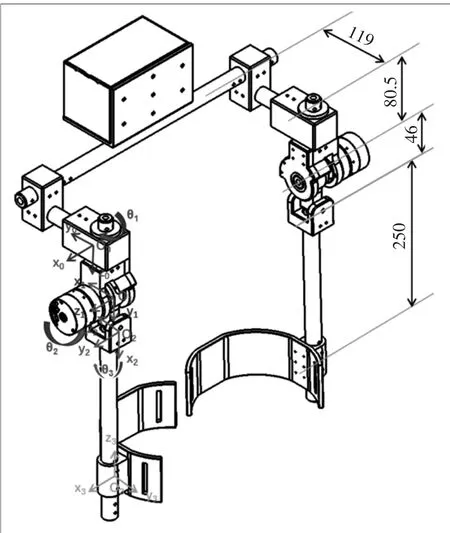
图2 下肢外骨骼D-H 坐标系建立
D-H坐标系之间坐标变换的通用公式如下:
根据该通用公式可以得到各连杆的坐标变换如下:
对照式(1)与式(2),可以得到如下所示的关系:
2.1.2 逆运动学求解
根据
可以得到其逆阵为
式(2)左乘所得逆阵可以得到以下关系式:
根据式(3)可以得到如下关系:
变换上述关系式并结合式(3)可得:
进一步计算可以得到:
下肢外骨骼运动学研究在运动时外骨骼的关节角度与外骨骼机构末端的空间位置关系。通过对外骨骼单侧腿的运动学模型分析,可以得出:外骨骼结构设计与主/被动自由度设置合理,运动末端位姿可控,满足设计要求。
2.2 MATLAB建模验证
2.2.1 D-H建模验证
本部分内容是利用Matlab Robotics Toolbox进行运动学仿真,并验证D-H建模的正确性。机器人工具箱是一款用于运动学仿真、轨迹规划和运动空间求解的MATLAB内置插件,可以将机器人设计过程中的位姿问题具象化,并且可以发现计算中存在的问题并进行纠正。根据机器人工具箱中的Link函数来建立仿真模型,结果如图3所示。

图3 MATLAB 运行结果图
由图3分析可以得出,外骨骼机器人的运动姿态仿真结果与运动学理论计算结果相一致,从而验证了建立的运动学模型在理论上的正确性。
2.2.2 外骨骼工作空间验证
机器人的工作空间是评估机器人工作性能优劣的重要指标。机器人的工作空间(Workspace)是指当机器人执行所有可能动作时,其末端执行器扫过的总体空间体积。工作空间受限于机器人的几何结构以及各关节上的机械限位。
在这里将验证下肢外骨骼在不考虑人体髋关节自由度的活动范围而只考虑外骨骼在所设计的3个自由度活动范围情况下的工作空间。外骨骼3自由度的活动范围如下,外骨骼髋关节旋内/旋外自由度的活动范围为:旋内180°~旋外180°;外骨骼髋关节屈曲/伸展自由度,为主动自由度,且带有限位装置,限位区间大约为屈曲90°~伸展30°;内收/外展自由度的活动范围约为:内收180°~外展180°。故可以确定θ1的取值范围为-180°~180°;θ2的取值范围为-30°~90°;θ3的取值范围为-180°~180°。最终所得外骨骼工作空间如图4所示。
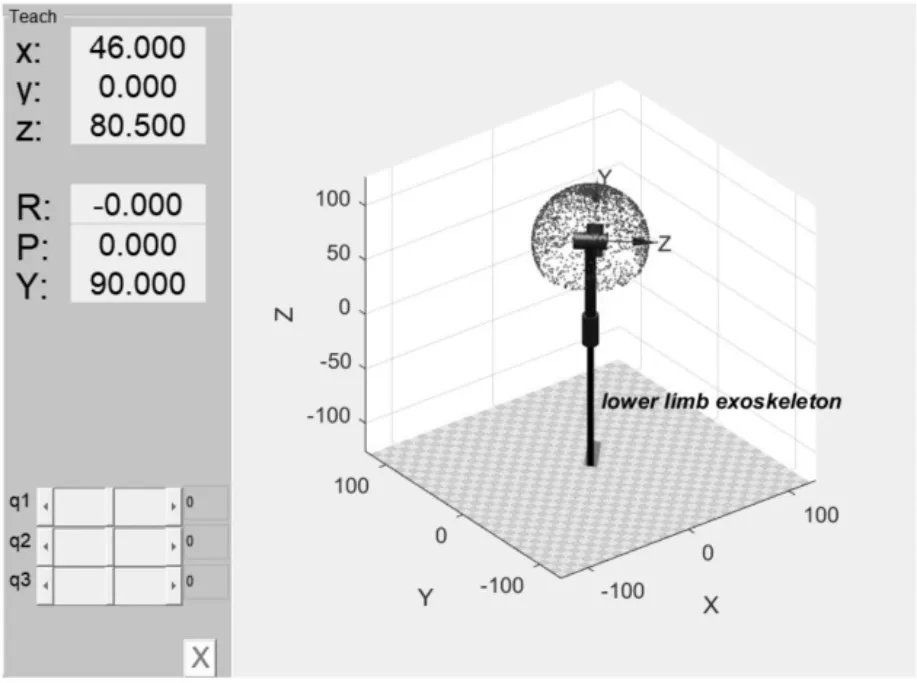
图4 下肢外骨骼工作区间
根据上述所得外骨骼工作空间可知:在外骨骼自身活动范围工作情况下,外骨骼工作空间符合预期设计,可以达到相应工作需求,满足人体下肢活动范围。
2.3 ADAMS分析
使用ADAMS软件对设计的下肢助力行走外骨骼机器人进行仿真分析,其主要目的是:检验设计的多自由度下肢助力行走外骨骼机器人模型的可行性和合理性,检查机构与穿戴者的下肢之间是否存在干涉;通过动力学分析,验证下肢外骨骼与人体的随动性和协调性。
将SolidWorks 中建立的外骨骼模型保存为Parasolid.(x_t)文件,再进入ADAMS中,进行导入。导入外骨骼人机模型后,对导入模型进行材质设置,本文所设计的外骨骼机器人刚体结构以铝合金为主。然后便是为模型添加约束,具体约束如表2所示。上述操作完成之后,下一步便是在下肢助力行走外骨骼的关节处添加驱动,以建立下肢助力行走外骨骼机构ADAMS模型。驱动可以直接添加在转动副上。本文中的虚拟样机采用外骨骼带动人的运动方式,故驱动添加于外骨骼髋关节处的转动副处。
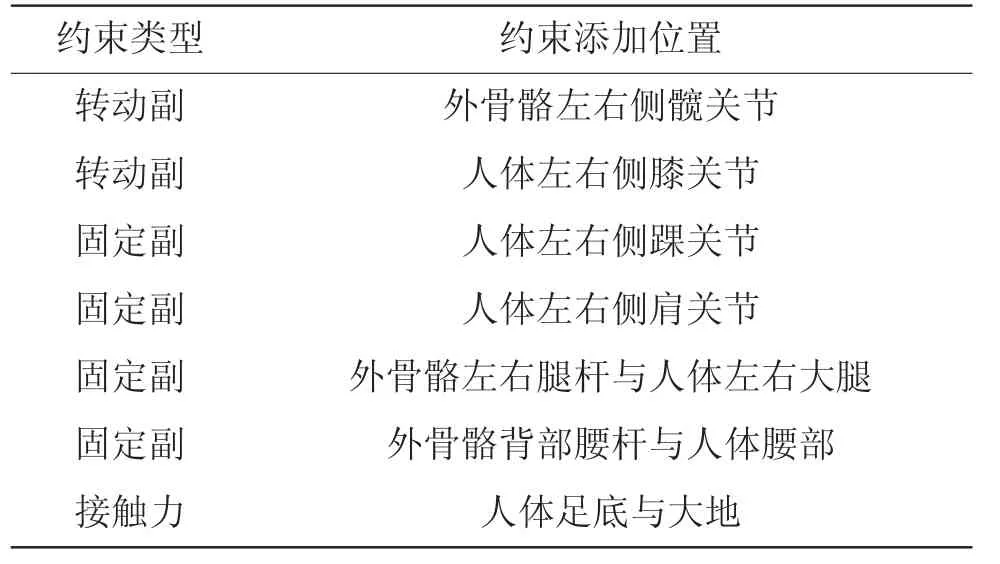
表2 下肢外骨骼约束情况
ADAMS仿真结束后,选择外骨骼左侧腿杆与人体左腿绘制二者沿前进方向坐标轴的位姿与角度曲线,这里仅绘制一个步态周期内的运动曲线图。根据图5 可以得出:外骨骼机器人与人体之间无干涉,且随动性较好;可为人体提供助力,符合预期设计。
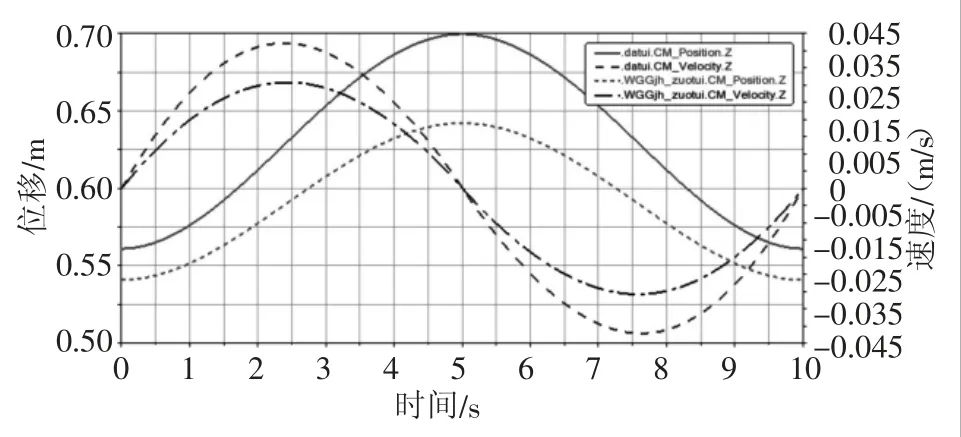
图5 ADAMS 仿真结果曲线图
3 结语
本文以下肢助行外骨骼机器人为研究对象,从外骨骼设计要求与设计方案出发,根据人体下肢结构、尺寸以及下肢运动状态,完成了下肢助行外骨骼的机械结构设计与建模。然后,对设计的外骨骼模型进行了D-H 参数建模,并利用MATLAB 软件和ADAMS软件对外骨骼进行了仿真分析,以验证外骨骼整体结构的安全性、合理性以及正确性。经过分析得出:所设计的下肢助行外骨骼整体结构安全性较高,结构设计合理,可以达到预期设计要求,满足工作需求。
