长江口深水航道遭遇周边船舶失控的应对策略
2024-02-27周雪松
周雪松 杨 柏
目前每天进出上海港的各类船舶近千艘次,船舶数量高企意味着发生失控险情的可能性也大幅增加。据海事管理机构对2023年上半年因船舶机电故障导致的失控险情的统计,上海海事局辖区内共发生失控险情66艘次,造成事故4起。部分失控险情发生在长江口深水航道内,以6月为例,4日“S”轮在D35浮附近失控,8日“B”轮在D27浮附近主机故障,19日“J”轮在D11浮附近主机故障,26日“Z”轮在D35浮附近失控。使用长江口深水航道的船舶大部分为重载船,而南北导堤间基准水深达到-12.5 m的深水航道仅350~400 m宽,航道外可利用水深及可航水域宽度受限,当航道内正常交通流编队中有船突然失控时,会造成航行秩序被打乱、通航效率下降和航道阻塞等不良影响,严重的甚至危及航道与船舶安全。
船舶在长江口深水航道内失控,若在主航道上搁浅打横会导致通航环境栓塞,而近距离态势突变又会与附近船舶形成碰撞危险,本文着重分析周边船舶面对此类风险时的应对策略。
一、航道的相关概念与法规
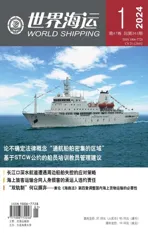
狭水道是指可航水域宽度狭窄,致使船舶操纵受到一定限制的天然水道。航道是指开敞性可航水道或有港口当局加以疏浚并维持一定水深的可航水道。以上海港为例,长江口深水航道是典型的狭水道,如图1所示。按照《长江口深水航道通航安全管理办法(试行)》第六章“附则”第32条,(一)“长江口深水航道”是指长江口船舶定线制A警戒区西侧边界线至圆圆沙警戒区东侧边界线之间航道,总长约43 n mile。A警戒区西侧边界线至D12灯浮航道底宽400 m,D12灯浮至圆圆沙警戒区东侧边界线航道底宽350 m。深水航道底宽维护水深为理论最低潮面以下12.5 m,其边界线由虚拟AIS航标标示。(二)“边坡100 m水域”是指深水航道两侧边界线向外各100 m的水域,其外侧边界线由侧面标标示。该水域主要用于大型重载集装箱船与大型邮轮超宽交会和应急操作,可供拖轮、疏浚作业船、引航作业船和测绘作业船使用。通常习惯称呼的“北槽航道”包括长江口深水航道和两侧边坡各100 m水域,而北槽航道外水浅且多变化,只有在借助潮高、留足富余水深的前提下才能被船舶用于追越或让槽。

图1 深水航道的侧面标及边界线等要素
《长江口深水航道通航安全管理办法(试行)》第15条规定:“在深水航道航行、作业的船舶发生或发现事故或险情,存在或疑似存在船体、动力设备、操纵设备等影响航行安全的异常情况,应通告周围船舶同时向吴淞VTS 中心报告。发生上述异常情况及事故或险情的船舶应当及时采取相应安全措施,并避免在航道内抛锚或妨碍他船正常航行,尽可能及时让出航道。”《长江上海段船舶定线制规定》第41条规定:“有关船舶避让事宜,凡我国现行有关法律法规及本规定未作规定的,适用《1972年国际海上避碰规则》。”可见,当失控险情发生时,失控船应及时处置并尽可能让出航道,而周边船舶应当依规主动避让失控船。
二、船舶失控分析
船舶失控是指船舶在航行过程中由于各种原因无法正常操纵或控制。
(一)失控原因
长江口深水航道船舶失控险情产生的原因有机器故障、人为误操作、恶劣天气或某些特别原因如季节性特点明显的禁渔期小鱼阻塞滤器、汛期或台风过后的水变浅等。(1)主机故障。船舶失去动力和对船速的控制,短时间内可利用余速及舵效控制船位。(2)舵机故障。船舶失去对运动方向和艏向的控制,如果最后施舵不在正舵位置会发生偏转,偏转速率受最后舵角的大小影响,可利用倒车控制冲程。(3)发电机故障。全船失电,主机、舵机不可用,应急发电机的启动需耗时约45 s才能为舵机及锚机等关键设备供电且功率有限,可利用抛锚降速或控制船位。
(二)险情特点
根据2023年上半年海事管理机构发布的《关于防范船舶机电设备故障险情的通报》,船舶机器故障导致的失控险情存在以下特点:(1)主机故障占比最大,为71.2%;其次是舵机故障占比为18.2%;发电机故障占比为10.6%。(2)散货船机电设备故障多发,占比为43.9%;然后依次为干杂货船、集装箱船、液货船等。(3)船龄越大,发生机电故障的概率越大。15年以上的船舶占比高达40.9%,10~15年的船舶占比为33.3%,10年以下的船舶占比较小。
三、遭遇周围船舶失控的操作
遭遇周围船舶失控是指本船因周围某船发生失控导致两船会遇态势恶化或本船被迫更改原有状态的情形。
使用长江口深水航道进出港的船舶通常按序组成编队并保持一定航速通过深水航道。受失控险情影响的船舶包括交通流编队中的对驶船,失控船前后的同向航行船,横穿航道船,附近的疏浚船、引航船、测绘作业船、拖轮或锚泊船等。下文以本船处正常航行状态而周围有船失控为例来分析险情,并从判断及避让角度阐述相关操作。
(一)险情判断
失控险情对环境的影响会因发生时间、地点的不同而有所差异。白天或夜晚,低潮或高潮,平水或急流,直航道、弯曲航段或航道端口,影响程度、控制方式及处置难度均有不同。失控船影响区域的范围具有不规则性。受余速、舵效、失电卡舵时的最后舵角、风、流、潮汐、水深地形、有无侧推器或拖轮协助、是否抛锚和锚链受力情况等影响,船舶实际运动方向难以估测,影响范围大小不一。
鉴于以上特点,船舶能及时发现并准确判断失控险情,变得极为关键。
(1)正规瞭望,保持“疑险从有”。当发现被关注船表现出明显有别于航道内船舶常规操纵行为的异常时,应即刻产生怀疑,寻求联系确认,并准备启动应急预案。
(2)与失控船建立有效联系。应了解会遇船舶的船名、船型、吃水、目的港等信息,当确认对方失控时选择最利于避险的对应操纵,采取为对方处置失控提供更久时间和更大空间的对应行动;当无法联系确认时,应立即降低航速至维持舵效或停车以增加判断时间,并寻求VTS中心介入。
(3)判断及避让过程中持续关注失控船动态。掌握失控船运动态势变化,了解失控船的转头角速度变化来判断其旋回圈或影响范围的大小。了解失控船是否下锚及并通过锚链受力情况来估算落锚点、最终停船位置及紧急处置所需范围。如可能,尽量控制航速等待失控船稳定船位,尽量使用失控船驶向区域外的其他水域安全通过,当距离接近到无法避免产生紧迫局面或碰撞时应采取最有助于避碰或最大程度降低碰撞损失的操纵行为。
(4)鉴于两船之间直线距离最短,根据“匀变速直线运动的位移与时间关系公式”,本船与失控船之间的距离为
式中:s为本船确认对方失控时双方之间的直线距离;v0为本船确认对方失控时的速度;t为本船从确认对方失控到最接近失控船的时间;a为加速度,取决于本船采取减速、停车、倒车或者抛锚等降低动能行为,以及现场风、流、潮汐或水深影响本船速降的因素。
根据式(1)可推断出以下关系:①当本船与失控船接近时,距离越远,判断、避让时间越充足;②速度越慢,到达风险区越晚,留给失控船紧急处置的余地越大;③发现失控船越早,控速越早,避让空间越大;④速降越快,抵达失控船影响区域所需时间越长,给予失控船处置时间越充分;⑤在与失控船接近过程中使用倒车或拖锚等降速行为能有效增加判断时间。
总之,遭遇周围船舶失控时,准确判断有利于本船规避的受制约点包括:因失控船运动态势变化不明、信息交流不畅或避让举动不协调,采取正确避让措施受制约;因处于交通流编队内航行,船舶密集时航速提升或降低受制约;因可航水域狭窄,灯浮较多,转向或掉头避让受宽度制约;因槽外水深较浅且经常变化,潮高未升时重载船舶利用槽外水域避让受制约。
(二)操纵避让
船舶失控时,若应对不及时或采取措施不当,极易发生搁浅、碰撞等事故,造成巨大损失。导致船舶失控的类型较多,但应对措施的选取主要围绕如何保向、控速和控制船位进行。当设备发生故障时,应合理利用本船资源和外部资源以确保船舶安全。在实际操作中,由于每次进出港时的可用资源不同,只有熟练掌握不同情况下恰当的应急反应操作和程序,培养情景意识,提升应变反应速度和能力,并根据实际情况充分合理利用内外部资源,从容面对各种突发情况并稳妥处理,才能最终保证船舶进出港过程中的安全。[1]
1.近距离避让
当离失控船较近且态势极为紧迫时,根据会遇态势可选择加车、大幅度向右或向左转向甚至掉头、减速或停车以拉大安全距离;当距失控船极近或碰撞无法避免时,应大幅度倒车甚至抛双锚将船在最短距离内拉停,必要时对着失控船转向以避免对方大角度撞击本船或争取并靠以最大限度减小双方损失。
(1)对于失控船附近船舶(疏浚船、测量船等),应关注失控船态势变化,避免本船处在失控船前行路径上或影响区域里;拖轮可参与救助,帮助稳定船位,避免局势恶化。
(2)对于失控船后方尾随船舶,应减速至维持舵效或停车,为判断失控船运动趋势、评估本船所处局面和选择应对方案留出时间,为失控船紧急处置创造空间。
(3)对于失控船前方船舶,如情况允许,应加速驶离,避免本船船舶领域被失控船侵扰,为失控船紧急处置留出空间。
(4)对遇的船舶可根据不同情况做出合适的选择(加速驶离、减速或停车倒车等待、大角度旋回让出航道、保向保速或抛锚等最有助于避碰的行为)。
避让结果不应导致另一碰撞危险或紧迫局面发生;狭水道避让空间受限,应注意避让水域的水深、当时潮高、底质,以及是否有锚泊船或灯浮等。
2.远距离避让
(1)及时预警,主张失控船权利、采取措施控制船位、降低船速、减小动能,必要时抛锚避免搁浅或碰撞。
(2)充分发挥交通组织服务的功能,在不同程度上人为干预船舶交通,以利于船舶安全通行,提高通航效率。[2]暂时关闭航道为失控船腾出紧急处置空间,降低其他船舶与失控船会遇或进入失控船处置区的频次,降低航道内交通流速度为失控船处置创造空间并给他船更多判断态势的时间。
(3)周边船舶积极配合,降低航速,准确判断失控状态的发展趋势,避免进入失控船影响水域,采取安全举措完成会遇,对陷入紧迫局面或碰撞危险的采取果断行动避免碰撞或降低碰撞损失。
(4)失控船应尽快解决导致失控的问题,恢复本船适航状态,减少对航道通航环境的影响。本船无法处理的,控制船位减少对航道的影响,配合周边船舶安全通行,并尽快在拖轮协助下航行至锚地或船厂接受修理。
案例1:Y轮(船长300 m,吃水11.5 m)因失控在16号浮下游出口航道抛锚,有多条拖轮协助控制船位,计划将其绑拖至锚地检修,出口船利用潮高合适、进口船暂停的有利时机,规避平水时段可能出现的Y轮打横阻断航道的风险,借助进口航道边坡慢速通过,如图2所示。
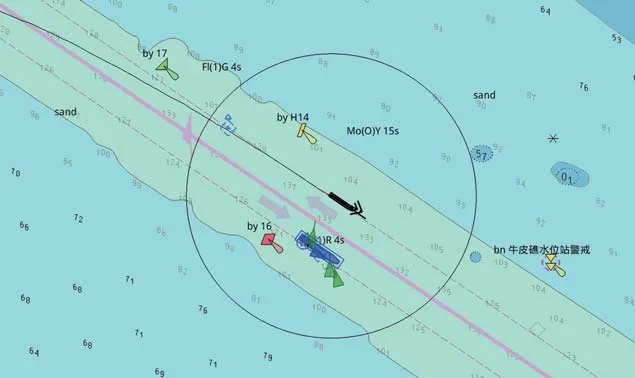
图2 出口船借助边坡驶过失控风险区域航段
总之,周边船舶应避免驶入失控船紧急处置所需水域。失控船在利用潮高、满足富余水深前提下应尽量使用深水航道外水域进行紧急处置;特别是船长大于300 m的,应谨防平流时段船身横亘航道或阻塞航路。
四、预防措施
面对难以预测的突发故障或意外导致的失控险情,除了当事船舶应尽可能控制好船位船速避免态势恶化外,周边相关船舶应当事先做好预防工作,防患未然,其中既包括现场操纵前的充足准备,也包括防患意识和应急能力的培养。
(一)增强失控风险判断及避让成功率的举措
(1)对所有计划使用长江口深水航道的船舶,应变预案应包括严格按照要求对车、舵、主电源和应急电源等船舶关键性设备进行测试,保证其处于良好状态;备锚(锚松至水面以上3 m以备紧急时抛下)、瞭头(加强瞭望、操纵抛锚)、备缆(船首两侧及船尾处松出缆绳方便拖轮系带),本船操纵或避让能力较弱时安排拖轮护航等。在狭窄受限水域操船时,驾引人员应熟知受风影响下船舶的漂移和偏转规律,尽量操控船舶占据上风位置,对运动中的船舶应准确估计风压差并进行保向操作,结合航行速度预置安全漂移距离。[3]
(2)遭遇周边船舶失控的船舶,在避让时首先要对本船吃水、各区域航道外水深及当地潮高变化充分掌握,以便利用对航道外可航水域范围的了解,对失控风险做出最快响应;掌握即时流向流速,以便准确估算本船位移距离。其次要始终保持VHF守听和全方位目视瞭望。前者能及时了解险情变化趋势,有利于本船提前做好应对准备;后者能以最快的速度对他船态势做出判断和响应,因为目测首向偏转出现异常是最快判断船舶失去保向能力的手段,参见案例2分析。
案例2:出口船M轮(船长215 m,吃水7.8 m)与发生舵机故障的进口船Y轮(船长158 m,吃水8.9 m)会遇的险情如表1所示。
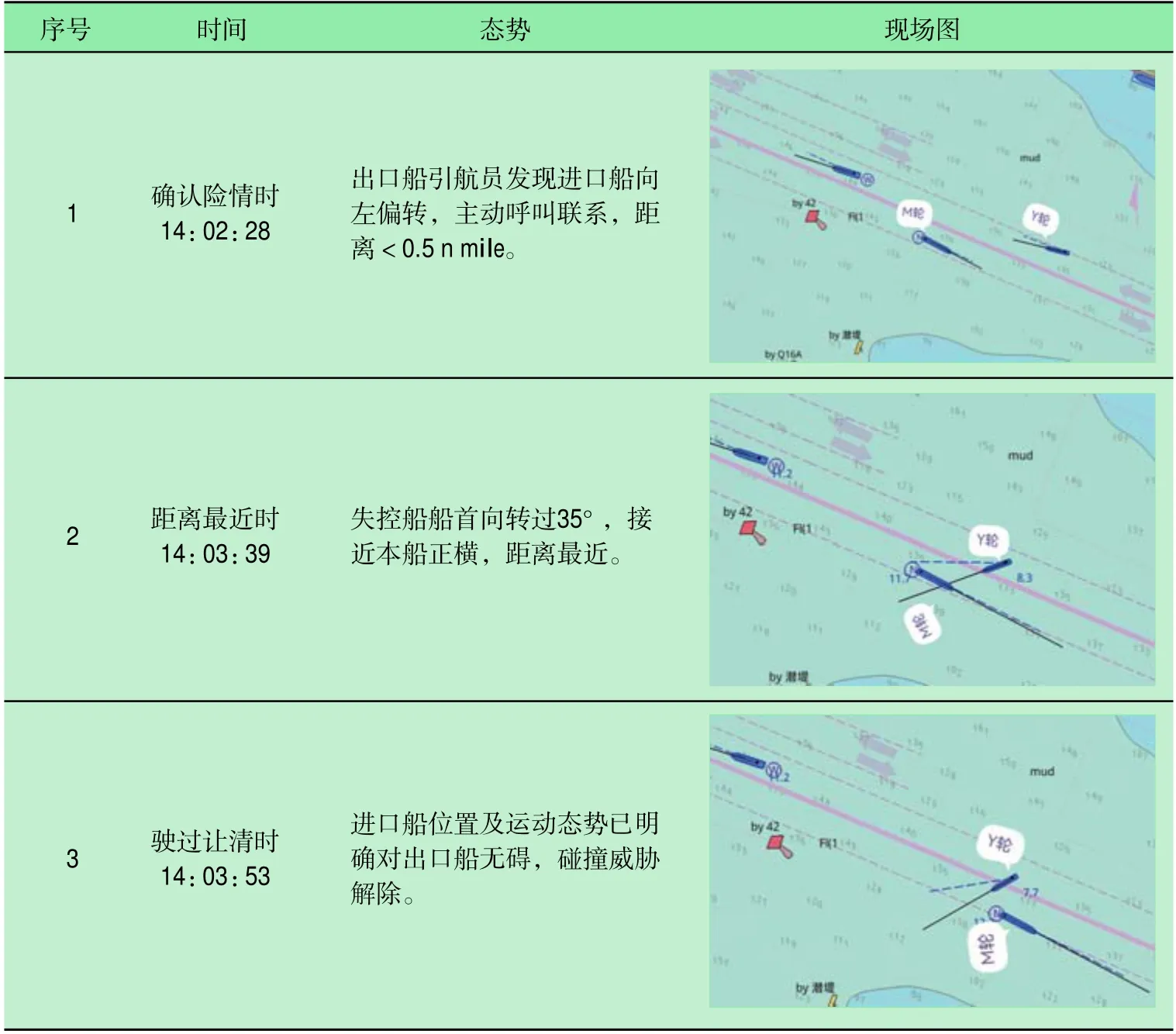
表1 案例2概况
在船舶失控初期,船员由于对自身解决问题或修复机器恢复正常航行抱有侥幸心理,未第一时间在航行频道CH06发布航警或通过交管频道CH09向VTS值班员汇报情况,导致周边船舶未能及时了解情况并采取有效措施进行避让,会遇局面恶化。
出口船及时发现风险,对失控船前行路径判断准确,加速驶离风险区的决策正确、执行果断。在不到2 min的时间内完成“发现风险—判断局面—制定决策—执行避让”,直到驶过让清,这源于长期的经验累积和有效的培训为避让成功打下的扎实基础。在失控船侵入出口航道时避免了因两船距离较近而产生船间效应。出口船航速控制得当,使用前进二转速(前进二与前进三转速对应的速度差4 kn),由于留有储备转速,才能在发现风险时采取加速手段,快速脱离风险区。
避让时要有根据风险来源区别应对的心理准备,周边船舶应避免处在失控船未来的运动路径上;宽让浮筒、抛锚船等固定物标或疏浚作业船等操纵能力受限船,应避免驶近或碰撞;与主航道内其他正常行驶的船舶相互协调好会遇约定;利用TCPA数据合理排序,先近后远处理;当碰撞风险无法解除时,避免人员伤亡和溢油污染,宁愿碰触浮筒也不与失控船发生大角度碰撞。
(二)提升船舶引航员应对失控风险的判断能力和应对技能
通过引航案例数据库的支持和航海模拟器培训,进行常规或应急情境演练,提升引航员的现场应变和局面操控水准,保障港口水域的船舶安全和通行效率。上海港引航站近5年使用长江口深水航道船舶的数据见表2。
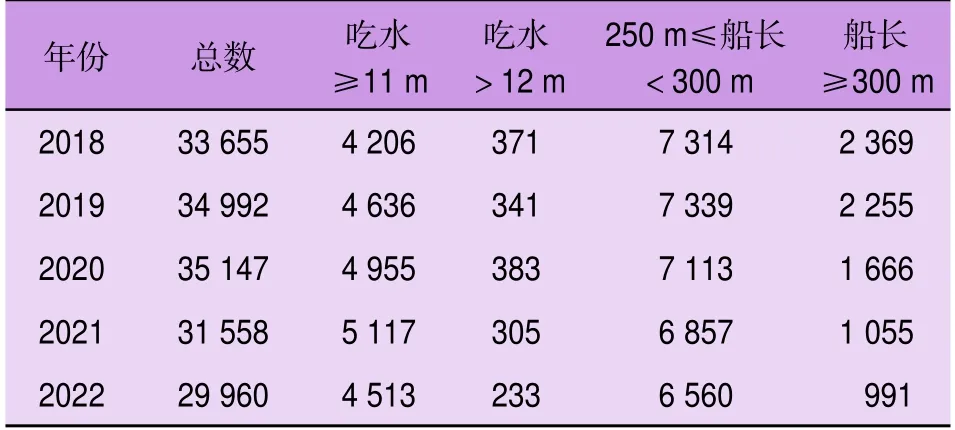
表2 上海港引航站近5年来使用深水航道的船舶艘次
1.充分利用案例数据库
通过案例分析、经验总结或教训反思,以期在遭遇周边船舶失控时现场操纵能做出准确判断。通过历年成功案例寻找出具有普适性的安全、简单、可靠的推荐航法,可供同行参考。
2.加强模拟器训练
模拟器训练有助于增加驾引人员的现场感和经验值,培养安全意识、情境意识、风险意识、危机意识、主动避让意识等五种意识,能及早发现异常情况,了解发展变化趋势,采取及时有效的行动,尽最大可能避免碰撞或搁浅的发生,减小碰撞损失并避免引发次生事故。
五、结语
本文总结了应对各种失控态势的船舶安全操纵,在长江口深水航道航行时应仔细瞭望,精准判断,遭遇失控险情时冷静避让,才能有效保障船舶进出港安全。