基于显著性的双鉴别器GAN 图像融合算法
2024-02-18谢一博刘卫国李梦晗
谢一博,刘卫国,周 顺,李梦晗
(西安工业大学 光电工程学院,陕西 西安 710021)
引言
随着现代科技的快速发展,传感器技术不断进步与完善,应用不断复杂化。为了更好地满足不同领域的需求,各种类型的传感器不断涌现并应用于不同的环境和场景,以获取更为全面且准确的信息。红外传感器得到的红外图像通过区分物体之间的辐射差异来进行目标和背景的区分,在夜间环境下能有较好的工作效果;而可见光传感器获取的可见光图像则可以提供清晰度的纹理细节信息和高分辨率。单一类型的传感器所采集到的信息可能很难对某一问题做出准确的判断。因此将红外图像和可见光图像进行融合处理,可以构造出包含热辐射源和多光谱信息的图像,既解决单一红外传感器背景模糊、细节缺失的问题,又克服了可见光传感器对环境条件的依赖性。由于红外和可见光图像的融合可以大大提高图像信息的解读能力,其已成为图像融合领域的重要组成部分。该融合技术最早应用于军事领域,在1999年,国外研发出第一个红外与可见光图像融合的夜视系统,用于在夜晚探测隐藏目标[1]。随后,各国相继研制出其他彩色图像融合系统、多功能望远镜、夜视镜等设备。随着红外与可见光融合技术的进步,当前该技术在夜间辅助驾驶、社区安防监控、目标检测等实际应用中具有实际价值[2]。
典型的传统融合方法包括基于多尺度变换方法[3]、基于稀疏表示方法[4]、基于子空间方法[5]、基于显著性方法[6]、基于总变异方法[7]等。然而,这些方法的局限性十分明显,传统方法没有考虑不同传感器图像的特征差异,而是采用相同的变换对不同的源图像提取特征,导致提取的特征表达性较差,因此基于深度学习的图像融合方法应运而生并成为学者们研究的热点[8]。在红外与可见光图像融合方面,基于深度学习的融合方法主要分为三大类:基于自编码器的图像融合[9]、基于卷积神经网络的图像融合[10]以及基于生成对抗网络(generative adversarial networks,GAN)的图像融合[11]。2015 年,HUANG W 等[12]通过构建堆栈自编码网络保留了全色图像的细节特征和多光谱图像的光谱特性。后来,LIU 等提出了一个基于卷积稀疏表示的融合框架,该方法有效利用图像的稀疏性特征,便于表征融合图像。随着研究的深入,Li 等[1]基于VGG-19 构建深度学习框架对图像分解后的细节部分进行特征提取与融合。
目前红外与可见光图像融合中最常用的方法为基于GAN 网络的方法。2019 年,MA J Y 首次将GAN 网络应用于图像融合,提出了基于GAN网络的无监督融合模型(FusionGAN)[13],但存在细节丢失和目标边缘模糊的问题。2020 年,MA J Y团队又提出了一种基于双鉴别器生成对抗网络的红外与可见光图像融合方法(DDcGAN)[14],该算法将红外与可见光源图像分别输入两个鉴别器,生成器与鉴别器对抗博弈能更好地保留红外和可见光图像的信息,使得到的融合图像具有更好的纹理细节和目标热辐射信息,但双鉴别器会忽略掉高层语义信息。2021 年HOU J L 等人[15]提出了基于语义分割的红外与可见光图像融合方法(SSGAN),该网络既考虑了红外和可见光图像的底层特征,又考虑了红外和可见光图像的高层语义信息。
由于基于GAN 的红外与可见光图像融合方法在对抗训练过程中会丢失部分细节信息,因此,本文对GAN 的网络结构以及损失函数进行优化,提出了更加适用于红外与可见光图像融合的网络模型。通过以两幅源图像的显著性区域作为鉴别器输入判定融合图像,从而使得融合图像保留原始图像更多显著特征;并借助添加梯度约束这一损失函数,保存显著对比度和丰富纹理,防止高对比度目标区域边缘扩散造成的背景纹理污染。
1 生成对抗网络模型
2014 年,GOODFELLOW I 等学者提出了由生成模型G和鉴别模型D组成的生成对抗网络GAN[16]。该模型是两个网络相互对抗博弈的过程,通过不断地反向传播更新参数,能提高生成器的生成能力和鉴别器的判别准确度,从而在数据中学习并生成新的数据。基于GAN 的图像融合框架如图1 所示。
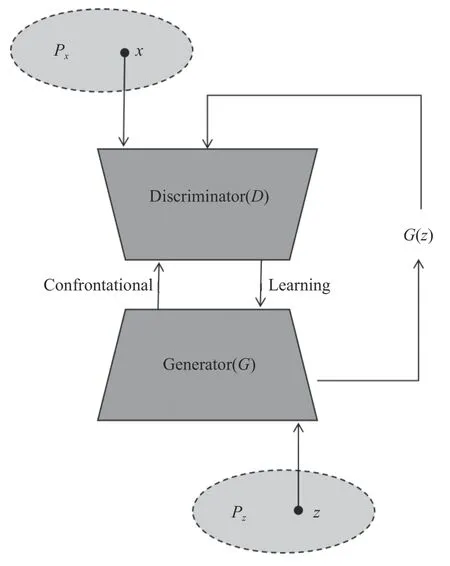
图1 基于生成对抗网络的结构框架图Fig.1 Structural framework diagram based on generative adversarial networks
从数学的角度来看,为了学习生成器在数据x上的分布PG,首先对输入噪声变量定义一个先验,然后对数据空间的映射表示为G(z;θg),其中G是一个可微分的函数,由参数为θg的多层感知器表示。再定义第2 个多层感知器D(x;θd),输出一个标量,表明数据x来自于输入数据而非PG。通过训练D,以最大限度地提高为训练实例和样本分配正确标签的概率;同时训练G,使其最小化log(1-D(G(z))[16]。生成器G和鉴别器D之间进行一场对抗性训练,此过程表示如下:
基于生成对抗网络的强大生成能力,一种基于GAN 网络的无监督融合模型(FusionGAN)[13]被提出。在该模型中,红外与可见光图像在生成器的指导下融合成一幅图像,鉴别器判定融合图像来自真实图像的概率,直到鉴别器无法区分融合图像与真实图像时博弈结束,此时融合规则下得到的融合图像为最佳图像。
FusionGAN 网络模型首次运用GAN 去解决图像融合问题,尽管该网络可以避免手动设计融合策略,通过引入GAN 并生成具有丰富细节信息的融合图像,但仍然存在细节丢失和目标边缘模糊的问题。为了进一步提高融合图像的质量,该问题在当前亟须解决。
2 本文方法
2.1 网络总体结构
针对单鉴别器无法同时获取两幅源图像信息的问题,本文设计了一个基于显著性的双鉴别器GAN 红外与可见光图像融合方法,模型框架如图2所示。在内容损失和感知损失的指导下,生成器将生成一张信息丰富且细节完整的融合图像。鉴别器的作用是不断迫使生成器学习,直到能够生成与鉴别器输入相似的图像为止,因此,为了使融合图像保留两幅源图像的显著区域,将构建两幅源图像的视觉显著图(即IR_SM、VIS_SM)作为两个鉴别器的输入。鉴别器分别鉴别源图像视觉显著图和融合图像,指导生成器生成高质量的包含源图像的细节信息和显著区域的融合图像。生成器与鉴别器进行不断对抗性训练,当鉴别器无法区分融合图像与可见光图像时,判定融合图像中的细节信息分布与可见光图像中的细节信息分布近似,最终获得一幅包含红外图像辐射信息及可见光图像纹理细节的融合图像。
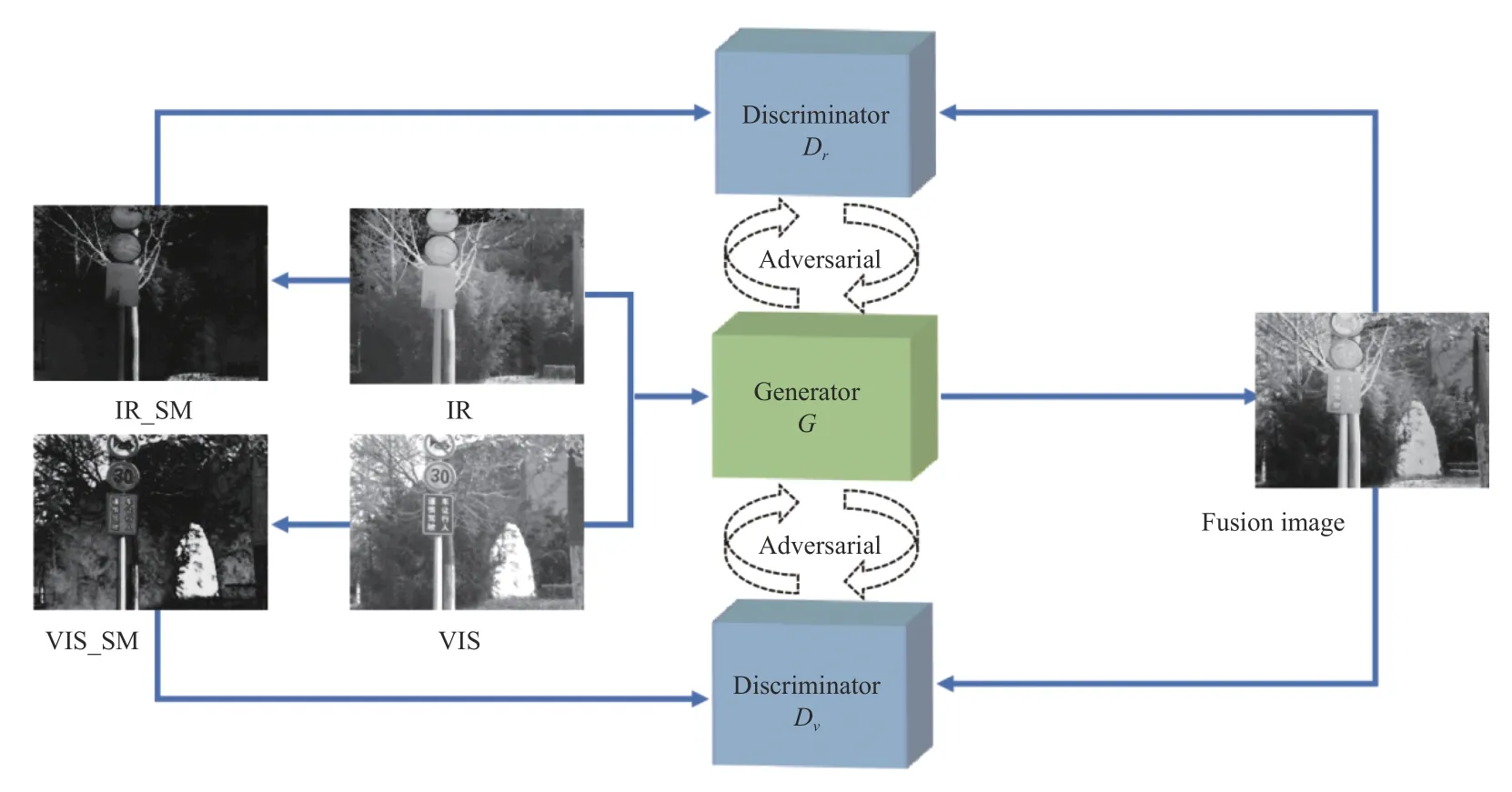
图2 本文算法模型结构框架图Fig.2 Structural framework diagram of proposed algorithm model
本文方法的主要核心包括3 部分:1)显著性视图的构造,通过均值滤波与中值滤波的结果作差来求解两种图像的显著图,并将其作为鉴别器的输入图像;2)网络结构,两个鉴别网络模型与一个生成网络模型的结构;3)损失函数,在生成损失函数中引入梯度约束以保留更多的细节信息,及两个鉴别损失函数的数学表示。
2.2 视觉显著图的构造
视觉显著图(saliency map,SM)能够反映图像中像素点的显著性程度,具体流程如图3 所示。首先采用均值滤波处理红外与可见光两幅源图像,再采用中值滤波,并将两者输出结果作差处理,即获得相应的高通图像[17-18]。
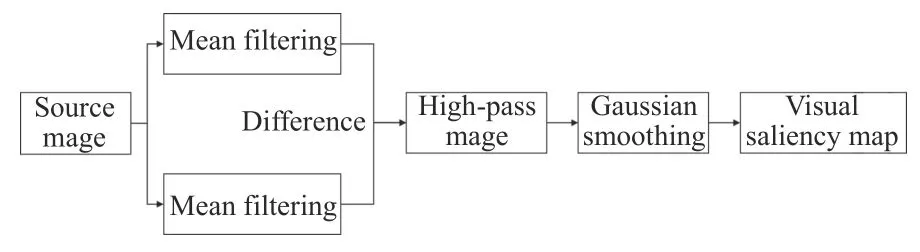
图3 视觉显著性提取流程图Fig.3 Flow chart of visual saliency extraction
红外图像与可见光图像分别由I1、I2表示,对应的高通图像分别由H1、H2表示,其过程由式(2)表示:
式中:(x,y)表示图像像素坐标;φμ1和φμ2为两幅源图像均值滤波输出;φρ1和φρ2为两幅源图像的中值滤波输出。
之后,对两幅高通图像H1和H2进行高斯滤波平滑处理,即获得两幅图像的显著值图像S1与S2。由式(3)表示:
对可见光的灰度图像进行显著性区域提取,结果如图4 所示。通过该方法提取到图像的显著性区域,其中石头与标牌为图像的主要信息。
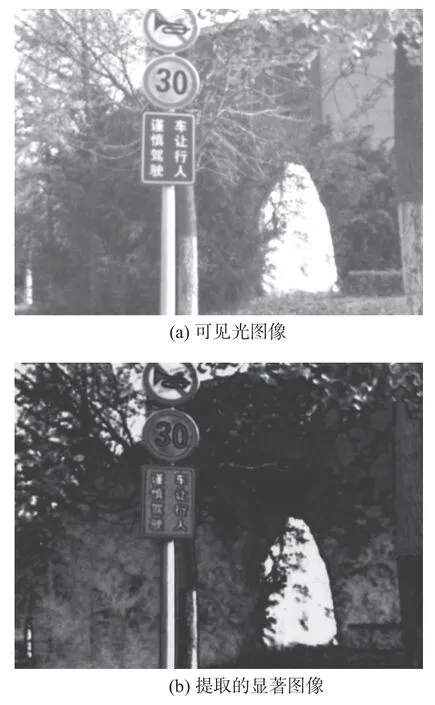
图4 可见光显著性区域提取结果Fig.4 Extraction results of visible-light salient area
2.3 网络结构
本文算法采用了基于卷积神经网络的生成器和鉴别器两个部分组成整个网络结构。
生成器G的网络结构如图5 所示,红外与可见光图像作为生成器的输入,而最终输出为IRRGB 融合图像。该生成器由5 个公共卷积层组成:对于每个卷积层,padding 设置为SAME,步长设置为1,特征图的大小将不会改变。为了解决数据初始化的敏感性以及避免消失梯度,所有卷积层中均采用批量标准化(BatchNorm,BN)模块和激活函数。如图5 中的箭头所示,在前4 层中应用来自密集连接卷积网络的密集连接层。以前反馈方式在每层和所有层之间建立连接,以实现特征重用,防止在卷积过程中删除一些重要信息,选择的输入和输出通道是2∶16、16∶16、32∶16、48∶16 和64∶1。
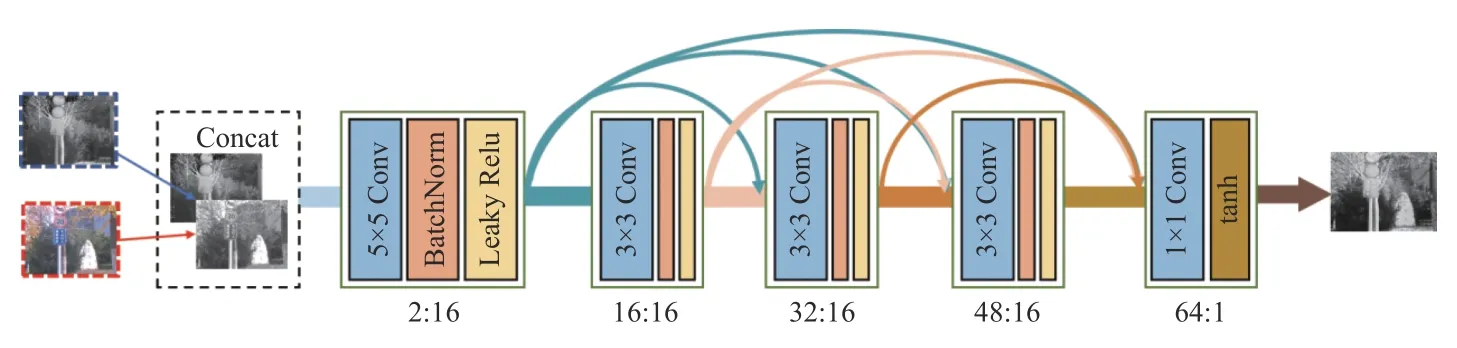
图5 生成器G 的网络结构图Fig.5 Network structure diagram of generator G
本文设计算法的网络中有两个鉴别器Dr和Dv,它们具有相同架构,如图6 所示。其作用均为分类器,生成一个输入图像来自真实数据而不是G的概率。该鉴别器采用4 个卷积层和1 个全连接层,步长和padding 分别设置为2 和VALID,因此不需要池化层。该网络的前4 层卷积核大小为3×3,卷积核个数分别为32、64、128 和256,因此输入和输出通道分别为1∶32、32∶64、64∶128 和128∶256。
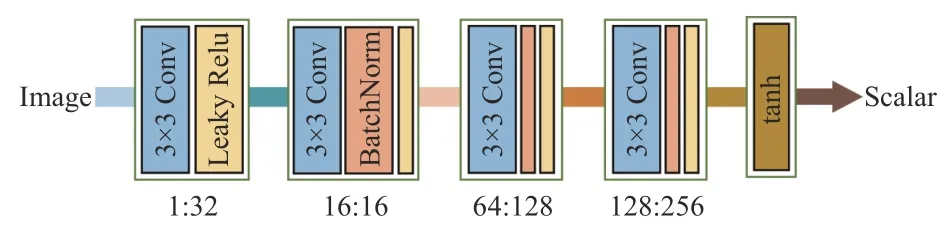
图6 鉴别器D 的网络结构图Fig.6 Network structure diagram of discriminator D
2.4 损失函数
在对网络进行训练时,需要以预测值和真实值之间的误差为基础对网络进行惩罚,这种惩罚通过损失函数来计算。由于损失函数种类繁多,因此需要根据不同的目标任务选择最适合的损失函数,以达到最佳的训练效果,从而使网络能够成功实现我们所期望的功能。生成对抗网络的损失函数主要包括生成器损失函数和鉴别器损失函数。
2.4.1 生成器损失函数
根据网络中生成器的目的,需要通过训练来欺骗鉴别器,并且要求约束内容中生成图像与源图像之间的相似性。故生成器包含生成器与鉴别器之间的对抗损失Ladv和生成图像与真实图像之间的内容损失Lcontent,生成器损失函数定义如下:
式中:α为平衡系数;Ladv和Lcontent定义如式(5)、式(6)。
图像的梯度信息能够反映边缘比较锐利的清晰度,且图像梯度值较大,则反映相应的图像边缘更加锐化。通过在损失函数中引入梯度约束来增强图像的细节信息。其中,损失Lgrad表示梯度约束,强制融合的图像If具有类似于Ir和Iv的梯度,具体定义如下:
式中:H和W代表输入图像的尺寸;∇为梯度算子;μ为平衡参数。
强度损失Lin约束融合图像保持与源图像相似的强度分布,以便保留重要的对比度信息,强度损失定义为
式中:||·||F表示矩阵Frobenius 范数;ξ是控制两项之间权衡的参数。
2.4.2 鉴别器损失函数
鉴别器的作用是通过训练输出一个标量将真实数据与虚假数据区分开来,在提出的图像结构中,使用两个独立的鉴别器(即Dr、Dv)来约束生成器分别捕获更多的对比度和纹理信息。Dr、Dv旨在分别将融合图像与红外和可见光图像区分,需要同时考虑生成器与鉴别器之间的对抗关系和Dr与Dv的平衡。鉴别器的对抗性损失能够计算出分布之间的散度,从而识别出强度或纹理信息是否虚假,以尽可能获取真实信息[14]。将相应的损失函数LDr和LDv定义为
鉴别器则是通过提取可见光与红外图像中的显著性特征来帮助区分融合图像和可见光图像。网络中采用最小平方损失函数,并基于最小化皮尔逊 χ2散度的原则,使网络训练过程更加稳定,从而使得鉴别器的损失函数能快速收敛。
依据两者图像不同的特性,可见光图像中主要存在丰富的纹理结构信息,而红外图像中主要存在显著的对比度信息。然而,在红外图像中也包含了一些结构信息;同样地,可见光图像也包含一些对比度信息。通过网络连续对抗的方式,本文方法可以生成具有良好视觉效果的融合图像,且以双鉴别器的方式在保留红外和可见光的固有信息方面取得了良好的平衡。
3 实验结果与分析
本文的实验图像均来自于自主搭建的红外-可见光成像系统,红外相机与可见光相机的分辨率、像元尺寸、帧率分别为1 280×1 024 像素和1 280×1 024像素、12 μm 和4.8 μm、25 frame/s 和211 frame/s。两相机相对位置固定,通过软件触发控制采集图像。由于两相机之间具有不同的外部及内部参数,故在图像融合之前需对图像进行配准裁剪,最终进行融合实验的图像分辨率均为800×600 像素。为了突出本文算法的优越性,本文选用几种算法进行定性和定量比较,包括:基于强度色调饱和度(intensity hue saturation,IHS)[19]、主成分分析(principal component analysis,PCA)[19]、拉普拉斯金字塔(Laplacian pyramid,LP)[20]、离散小波变换(discrete wavelet transform,DWT)[21]、双尺度融合算法(two-scale image fusion,TIF)[22]、FusionGAN[13]及GANMcC[23]、DDcGAN[14]与SSGAN[15]。
定量评价依赖于一些现有的统计指标,从不同方面评估融合结果的质量。为了客观地评价各种融合方法的结果,选用信息熵(EN)[24]、平均梯度(MG)[25],空间频率(SF)[26]和边缘强度(EI)[27]作为评价指标来验证本文方法的有效性。不同指标所表示的意义不同,EN 表示图像信息丰富度,MG 用于衡量图像的纹理和细节的表征能力,SF 衡量图像在空间中的活跃程度,EI 表示图像的边缘细节信息。本文选用的评价指标均与图像质量的关系呈正比例。
3.1 融合结果主观评价
不同场景下不同算法进行红外与可见光图像融合的结果如图7 所示。场景1(Img 1)为道路地面场景,Img 1 中红外图像的车位线几乎全黑,在对道路环境不明的情况下很难分辨出其为停车线,容易误判,在可见光图像中井盖与道路“融为一体”,而融合图像较好地还原了道路环境并能分辨出井盖;LP 和DWT 的融合效果更加偏向可见光图像,其结果有丰富的纹理细节,但目标和背景之间的对比并不明显;IHS、PCA、FusionGAN、GANMcC 及DDcGAN 的融合效果更加偏向红外图像,具有良好的热辐射信息,但纹理细节不足;SSGAN的细节信息较明显,但其主观视觉效果不符合真实场景;而TIF 和本文方法更好地融合了红外和可见光的原始特征,相较于TIF,本文方法的融合图像将道路上的石头路障和人更好地显示出来。场景2(Img 2)的红外图像无法识别到石头目标,采用不同算法将红外图像与可见光图像的信息进行融合以突显目标;IHS、PCA 与FusionGAN 的目标同样无法识别;LP、DWT 的结果过亮,主观视觉效果不佳;TIF、GANMcC 与DDcGAN 的结果良好,路牌的文字信息与场景的信息都能够观察;SSGAN方法的融合图像细节信息丰富,但图像中并未蕴含热辐射信息;而本文所提出的算法的融合结果不仅有明显的对比度,而且有丰富的纹理细节。场景3(Img 3)为包含天空背景下的人物与石碑场景,在IHS、PCA、FusionGAN、GANMcC 与DDcGAN的融合图像中,天空背景是更加偏向红外图像的黑色,与主观视觉特征不符合;SSGAN 的结果特征细节过于突出,但背景信息不真实;TIF 的结果并没有凸显显著目标,图像整体较为模糊,且人物目标不明显;LP、DWT 与本文方法在凸显显著目标的同时保留了天空背景的视觉特征,但LP 与DWT 对草地表征过亮,整体图像效果不佳;本文方法不仅突出了人物目标,周围的环境信息也得以较好地保留。在场景4(Img 4)中,IHS、PCA、FusionGAN、GANMcC 与DDcGAN、SSGAN 的融合图像中,天空背景偏向红外图像的黑色,且整体图像主管视觉偏暗,不符合拍摄的光照场景;TIF 的结果未凸显人物目标;LP、DWT 与本文方法既凸显了目标,也较好保留了天空背景的视觉特征,周围的树木也较明显;本文方法生成的图像中人物(即目标)和树木(即背景)之间的对比较强,且树木的纹理细节丰富,融合图像在两幅源图像的信息之间取得了较好的平衡。
总结4 组实验结果,IHS、PCA 方法的融合效果接近红外图像,拥有较强的对比度,但缺少纹理细节;LP、DWT 方法的图像接近可见光图像,保留了丰富的纹理细节,但其对比度不明显;TIF 方法的图像目标与背景区分不明显,且主观视觉效果不佳;FusionGAN、GANMcC 与DDcGAN、SSGAN方法的融合图像虽然同时保留了红外的热辐射信息与可见光图像的纹理信息,但是对实际环境背景的描述不恰当,且整体效果偏暗;本文方法的显著性特征明显,且目标信息突出,对环境描述符合实际情况。
3.2 融合结果客观评价
除了通过主观视觉对不同算法进行定性描述之外,本文选择了信息熵、平均梯度、空间频率以及边缘强度4 种评价指标,对10 种图像融合算法在不同场景下的图像进行定量评价。具体的客观评价结果如表1 所示。
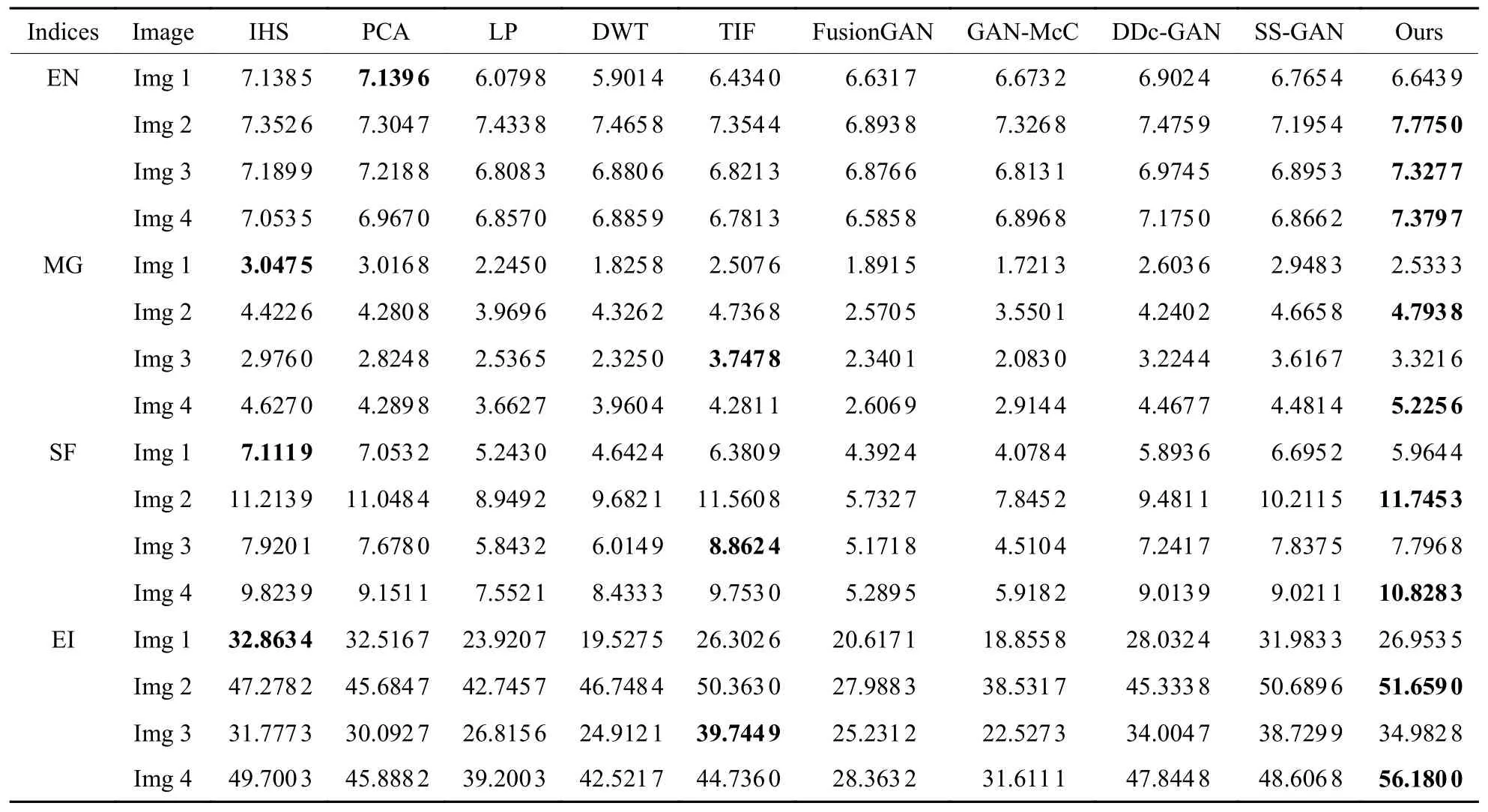
表1 不同方法对比实验客观评价结果Table 1 Objective evaluation results for different methods of comparison experiments
分析表1 中不同方法评价指标的结果,就EN 而言,相较于其他融合算法,本文方法的数据结果最佳,其熵值最大表明了其所蕴含的信息量越丰富,说明本文方法较好地实现了两种图像不同信息的融合。就MG 而言,本文方法相较于其他融合算法表现效果更好,TIF 算法次之,本文方法的图像结果平均梯度综合最大,说明该图像所能体现的层次更多,细节表现力更强,图像更清晰。就SF 而言,TIF 算法与本文方法的空间频率数据指标为最高;在不同的实验结果中,除去第1 组实验结果较低,其他几组实验结果证明本文改进的算法更胜一筹,指标值约为8.0~11.0;因此,本文方法所得图像的边缘信息更丰富,对比度更高,图像的融合质量最佳。就EI 而言,本文改进的算法表现更好,在4 组数据中有2 组数据值最高,本文方法的融合图像边缘强度最大,而采用IHS与TIF 算法结果的边缘强度数据次之。可以得出结论,本文方法具有更丰富的细节信息,保留了红外图像与可见光图像中显著的对比度和丰富的纹理。
为了更直观地观察不同方法的指标对比结果,将表1 可视化表示,如图8 中(a)、(b)、(c)、(d)子图分别表示信息熵、平均梯度、空间频率以及边缘强度的折线堆积图。
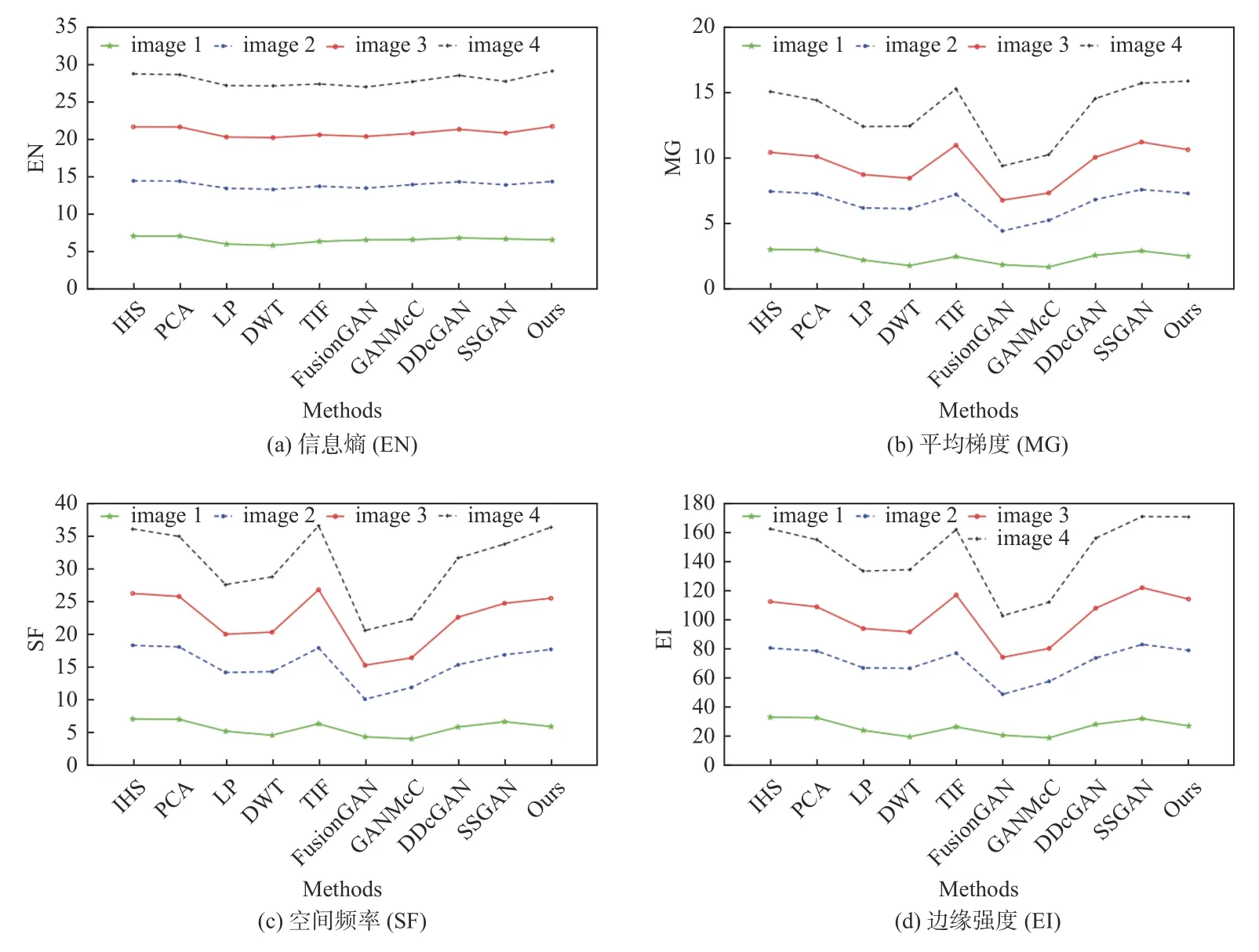
图8 不同方法的评价指标折线堆积图Fig.8 Folded-line stacking diagram of evaluation indexes of different methods
观察图8 不同方法的评价指标折线堆积图,在所有指标中,本文方法与TIF 算法、SSGAN 算法的数据结果较好。综合几组实验及不同指标,本文方法的表现最佳,表明该算法能够从源图像获得更全面且有价值的信息。融合图像既包含了丰富的纹理细节,也较好地保留了源图像的边缘细节特征,其结果具有良好的视觉体验。通过对主观视觉效果图的观察及客观数据的描述,最终得出本文方法在融合图像效果上优于其余算法。
4 结论
针对红外与可见光图像在不同场景下对目标识别能力的强弱问题,本文将红外与可见光图像进行融合,提出了一种基于显著性的双鉴别器生成对抗网络红外与可见光图像融合方法,创新性地以两幅源图像的显著性区域作为鉴别器输入,从而使得融合图像保留原始图像更多显著特征;该网络的生成损失函数中添加了梯度约束,以保留更多的细节信息,防止了高对比度目标区域边缘扩散造成的背景纹理污染。结果表明,本文方法不仅能够保留红外图像强对比的目标信息,而且能够保留可见光图像的主观视觉优势。综合评价验证了本文方法的可行性及优异性。随着红外与可见光图像融合技术广泛应用于工程技术和科学研究中,本文所优化的图像融合方法实现了红外图像和可见光图像的有效融合,提高了融合图像的质量,在目标识别等领域中具有十分重要的意义。
