一种双视场电视/激光测距接收共光路一体化机设计
2024-02-18常伟军李超良杨华梅李明星
常伟军,李超良,杨华梅,李明星,于 跃,张 智
(西安应用光学研究所,陕西 西安 710065)
引言
双视场电视/激光测距接收共光路一体化机(以下简称一体化机)主要提供良好的昼间电视图像,与系统激光发射组合,对目标进行重频测距,能够对空中运动的远距离目标、近距离目标进行探测、识别[1-3]。一体化机通过视频控制单元接收系统指令,操控大/小视场切换。在进行目标跟踪时,可选用长焦距/小视场,以保证跟踪距离和精度;在捕获和观察时,使用短焦距/大视场,可以很好地兼顾系统对目标的捕获、跟踪与监视[4-5]。激光测距发射组件发射激光信号至被测目标,被测目标对激光信号进行散射,通过一体化机光学系统、分光镜透射会聚于雪崩管靶面上,激光测距接收组件可进行自适应调整控制,实现激光回波信号的接收,并完成激光测距工作。
1 技术指标
双视场电视/激光测距接收共光路一体化机设计技术指标为
1)光学视场角
电视大视场:6.9°×5.5°(水平×垂直);
电视小视场:1.8°×1.4°(水平×垂直);
激光接收视场:3.25 mrad。
2)电视作用距离
能见度不小于23 km;
相对湿度不大于80%条件下,对2 m×2 m 目标跟踪距离≥13 km。
3)相对孔径
电视大视场:1/4;
电视小视场:1/5.5;
激光接收视场: 1/0.96。
4)工作波段
700 nm~900 nm &1 064 nm。
5)整机质量
整机质量不大于10 kg。
2 器件选型
2.1 CMOS 选型
CMOS 选型主要基于两点考虑:一是光学系统的适配性,二是器件帧频特性、动态范围、照度特性以及小型化等。根据应用需求,大视场时Camera-Link 数字视频采用1 280×1 024 @100±0.5% fps 进行输出,小视场时可输出2×2 并的1 280×1 024 @100±0.5% fps 视频。选择IMX252 型CMOS 图像探测器成像组件,技术指标为:有效像素数2 560×2 048,像素大小3.5 μm×3.5 μm,帧频100 fps,电子快门为全局。其光谱响应曲线如图1 所示。
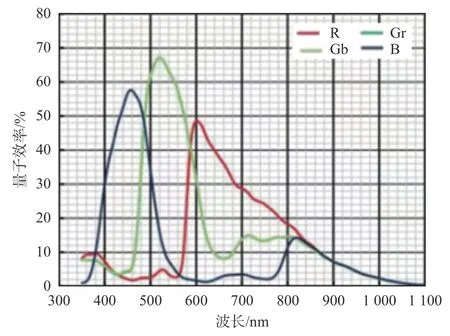
图1 CMOS 光谱响应曲线Fig.1 Spectral response curves of CMOS
2.2 雪崩管选型
根据激光测距接收要求,选择Excelitas Technologies 公司(美国)的C30950E-EL 型雪崩管,技术指标是:激光波段1.064 μm,光敏面直径Φ0.8 mm,光谱响应度1.41×105V/W。其光谱响应曲线如图2所示。
3 光学设计
3.1 光学系统设计
为了降低光学系统的空间尺寸,以及具备较大的相对孔径成像能力,本光学系统采用宽波段、双视场电视/激光测距接收共光路设计方案。双视场电视单元工作过程是:当目标反射光从共光路镜组入射后,经分光镜、大视场中继镜组、反射镜至共用COMS,通过大视场中继镜组的切换来改变系统焦距,从而实现电视大/小视场之间的切换。其中大视场中继镜组在光路中默认为大视场,大视场中继镜组切出光路时为小视场,大/小视场光学系统如图3 和图4 所示。激光测距接收单元工作过程是:当目标反射光从共光路镜组入射后,经过分光镜透射至激光接收镜组,与系统激光发射组合,通过激光测距接收镜组进行激光回波接收,完成激光测距工作。
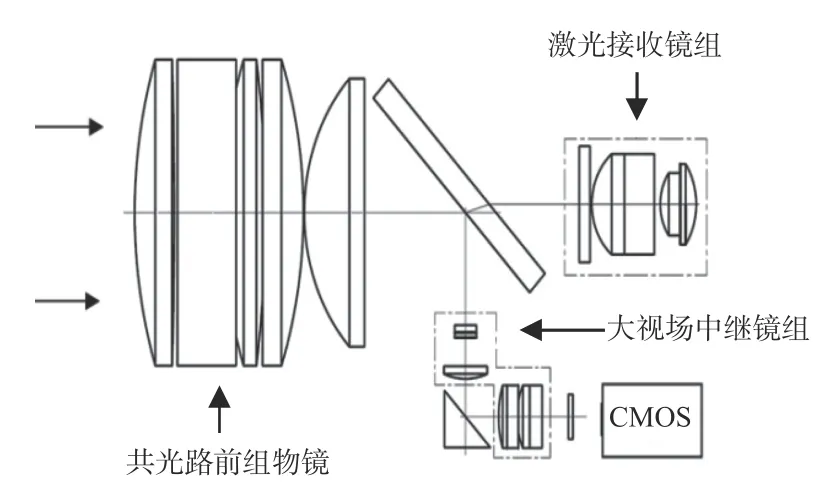
图3 大视场光学系统示意图Fig.3 Schematic diagram of big field of view optical system
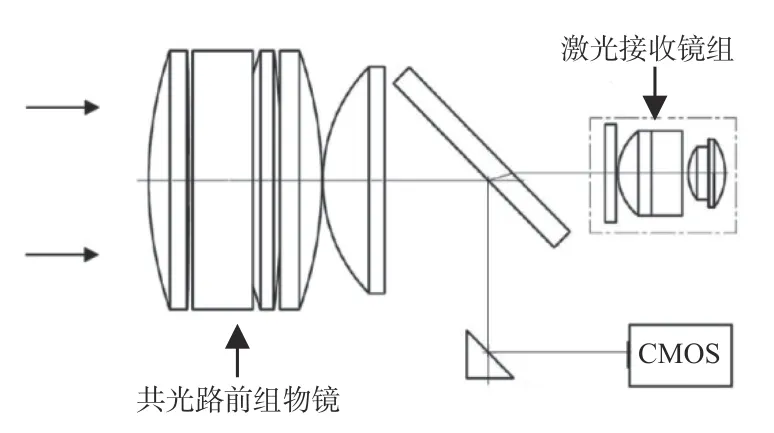
图4 小视场光学系统示意图Fig.4 Schematic diagram of small field of view optical system
根据一体机的视场要求以及CMOS 探测器件的靶面尺寸要求,按照公式(1)计算各视场焦距[5-6]:
式中:f′为焦距,单位mm;ω为垂直半视场角,单位(°);d为水平(垂直)靶面半高度,单位mm。具体计算结果如表1 所示。
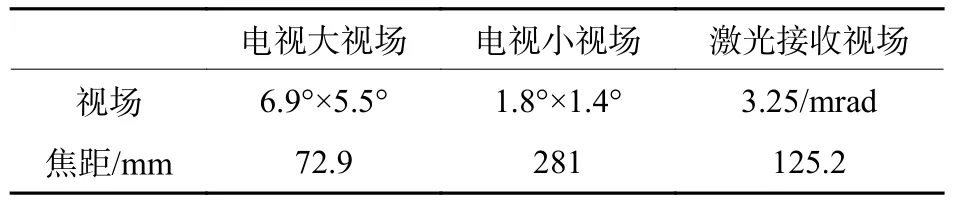
表1 电视视场焦距计算结果Table 1 Calculation results of focal length of fields on TV camera
3.2 像质评价
3.2.1 几何分辨率计算
根据约翰逊准则,以及探测识别目标所需的空间频率,根据公式(2)计算出作用距离[5]:
式中:l为目标到系统距离,单位m;Z为目标临界尺寸(最小高度或宽度),单位m;N为识别目标所需空间频率,单位lp/m;f′为物镜焦距,单位mm;Nc为CMOS 的极限分辨率,单位lp/mm。几何分辨率计算结果如表2 所示。
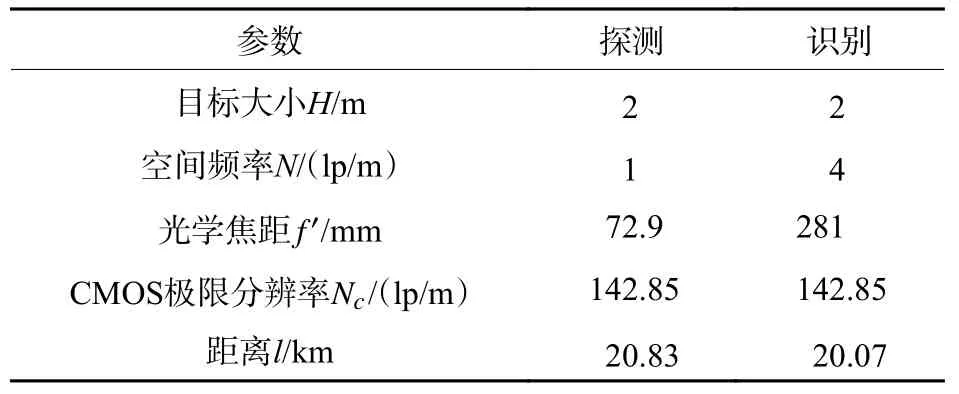
表2 几何分辨率计算结果Table 2 Calculation results of geometric resolution
由几何分辨率计算结果可知,该光学系统的设计以及选择的CMOS 探测器件能够满足指标要求的探测与识别作用距离。
3.2.2 点列图
用点列图中点的密集程度可以判断光学系统的成像质量。电视大视场可见光点列图如图5 所示。从图5 可以看出,点列图中点的密集程度较高,整体像质优良。电视小视场可见光点列图如图6 所示。从图6 可以看出,点列图中点的密集程度较高,点列图的均方根(RMS)小于或接近探测器像元尺寸,整体像质优良。激光测距接收可见光点列图以及激光回波光斑与探测器靶面分析示意图如图7 和图8 所示。从图7 和图8 可以看出,激光接收系统在不同视场点列图的均方根(RMS)均小于光敏面直径(Φ0.8 mm),且激光回波光斑在不同视场的大部分能量落在探测器靶面之内。
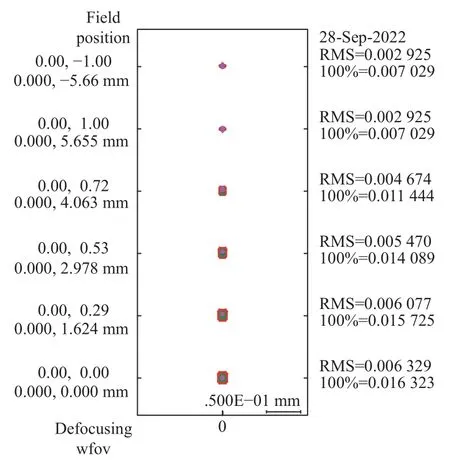
图5 大视场点列图Fig.5 Spot diagram of large field of view
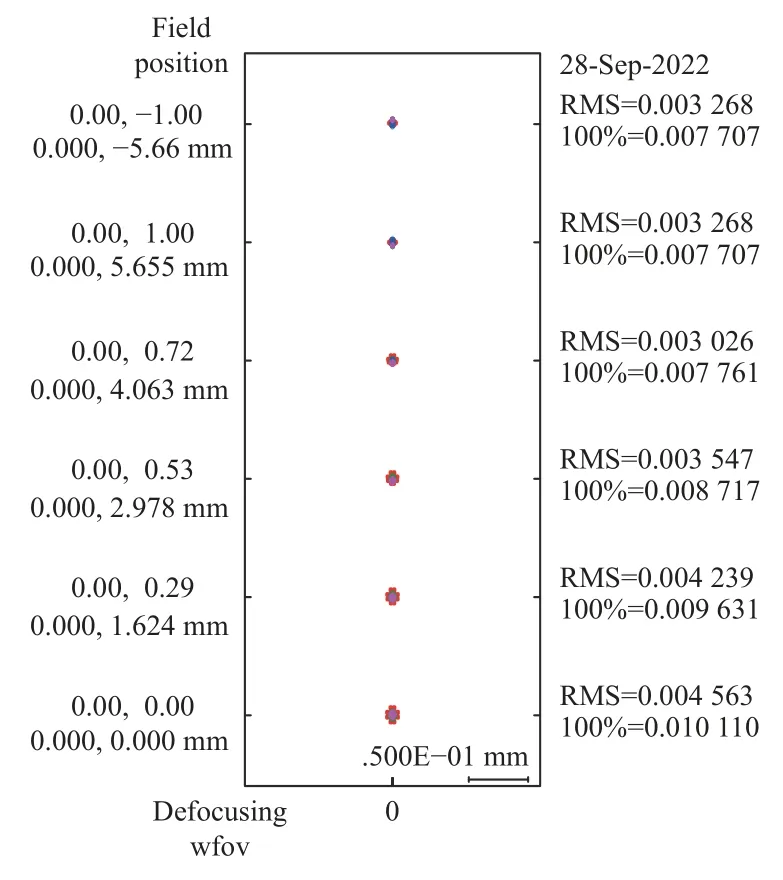
图6 小视场点列图Fig.6 Spot diagram of small field of view
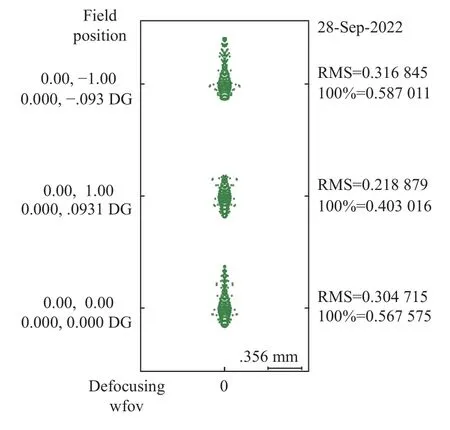
图7 激光测距接收点列图Fig.7 Spot diagram of laser ranging reception
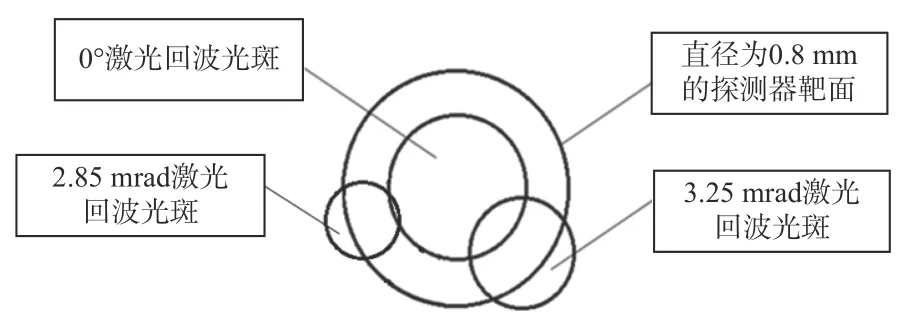
图8 激光回波光斑在探测器靶面的分析示意图Fig.8 Analysis schematic diagram of laser echo spot on detector target surface
4 光、机一体化设计
4.1 系统结构设计
在保障可靠性指标的基础上,尽可能使系统模块化、轻量化,以提高互换性,同时使一体化机性能更好地满足各项指标要求[7-9]。一体化机从功能上分为双视场电视/激光共光路光学组件、分光镜组件、大/小视场切换组件、反射棱镜组件、视频控制组件、CMOS组件、激光测距接收组件。其中分光镜组件、大/小视场切换组件、反射棱镜组件安装在整机主壳体底部且在同一平面上;视频控制组件安装在整机主壳体顶部,当视频控制单元接收到视场切换指令,电机带动齿轮转动,通过齿轮传动带动丝杠转动,丝杠托举装有大视场中继透镜组的支撑板,沿着光杆轴向作直线运动,实现大视场中继透镜组的切入/切出;CMOS 组件、激光测距接收组件与整机主壳体采用轴孔配合方式进行安装,确保CMOS 组件、激光测距接收组件与入射光线良好耦合。一体化机结构组成如图9 所示。
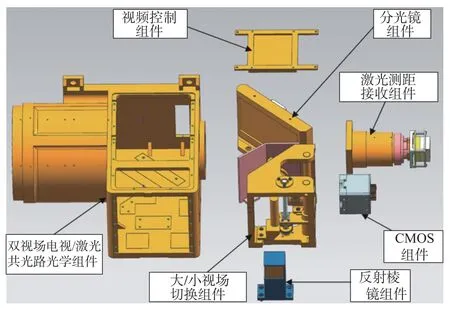
图9 一体化机结构组成图Fig.9 Structure composition diagram of integrated machine
4.2 整机主壳体结构设计
由于一体化机的共光路光学组件尺寸较大、镜片数量多,为更好地适应车载环境冲击、振动以及共光路的设计要求,采用主镜筒与整机主壳体一体化设计,并在垂直于安装面方向和主镜筒方向增加加强肋板,如图10 所示。最后采用整体铸造方式进行加工,材料选用铸铝ZL101A,提高主镜筒与壳体的强度。
为减少光轴零位走动,对各镜组进行定中心装调,采用灌胶固定、止螺固定,提高各镜组间的稳固性[8-10]。成像组件、激光测距接收组件与主壳体采用轴孔配合方式进行安装,提高光轴的一致性。
5 通信控制单元设计
一体化机通信控制单元采用双H 桥电机启动芯片并联控制设计方案。该方案首先提高了运行额定电流,其次,当大视场中继透镜组的支撑板触发限位开关拨片时,限位开关向通信控制单元反馈检测结果,从而实现电机对传动部件的精准限位控制。通信控制单元主要包括通信、大/小视场切换控制功能,主要通过单片机实现,控制原理框图如图11 所示。
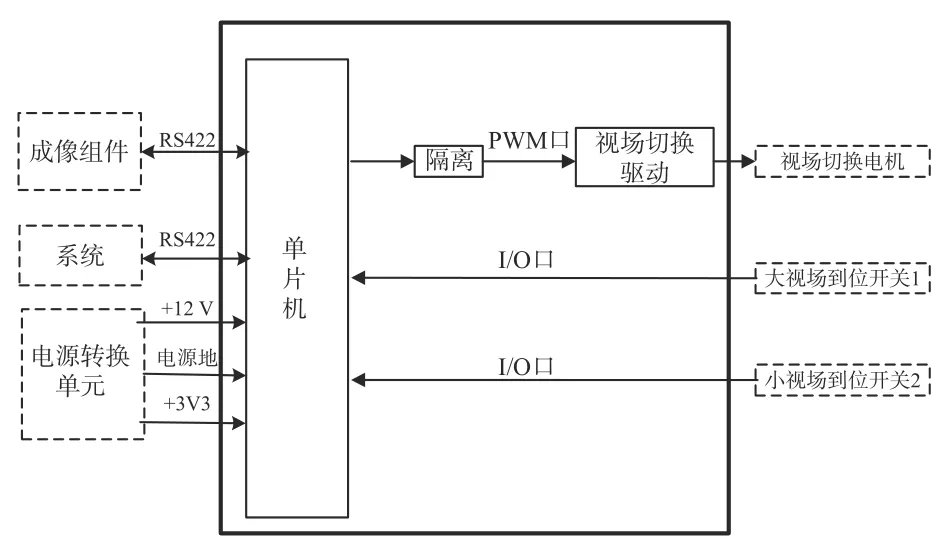
图11 通信控制单元原理图Fig.11 Schematic diagram of communication control unit
通信控制单元控制过程如下:
1)通过配置单片机脉宽调制(PWM)寄存器的参数来调整PWM 的占空比,通过控制占空比实现对电机的转动方向以及转速大小的控制。
2)通过采集霍尔元件、开关信息获得视场切换到位的信息。
3)通过RS422 异步串口通信获得系统控制指令、成像组件与视频处理单元的反馈信息,同时向成像组件及视频处理单元发送控制指令,并向系统反馈相关信息。
6 设计结果
依据应用需求,首先开展CMOS、雪崩管器件的选型工作,然后开展光学、机械、电气系统设计。设计结果表明,一体化机满足双视场电视和激光接收视场、作用距离、搜索/跟踪等技术指标要求,一体化机的实际质量为9.4 kg,满足设计要求和尺寸包络要求,外形如图12 所示。
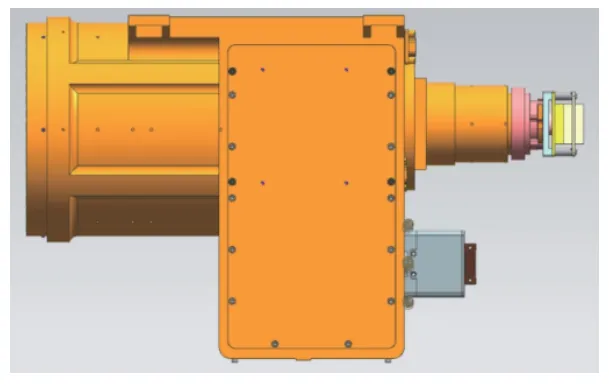
图12 一体化机外形图Fig.12 Outline drawing of integrated machine
7 结论
本文设计了一款双视场电视与激光测距接收共光路一体化机,主要对昼间目标进行成像,通过视场切换组件达到大/小视场的切换,适应大/小两种场景目标的观测,激光测距接收组件与系统激光发射组合,可对目标进行重频测距。给出了光学系统大/小视场计算结果、几何分辨率计算结果和相关点列图,通过理论分析以及Zemax 光学软件和UG 建模软件的仿真评估可知,该系统的光学设计、结构设计等满足指标要求,可广泛应用于车载光电探测、跟踪等方面。
