小型无人机载横滚-俯仰结构光电载荷前向对地扫描技术研究
2024-02-18袁屹杰张卫国程勇栋伊兴国
袁屹杰,张卫国,王 谭,程勇栋,王 毅,王 超,伊兴国
(西安应用光学研究所,陕西 西安 710065)
引言
光电信息侦察领域中,由小型无人机平台搭载光电载荷构成的侦察系统,具备对指定区域进行小范围搜索或定点持续监控能力,在近期国际冲突热点中起到了越来越重要的作用[1]。随着新应用对信息感知的全面性、实时性要求越来越迫切,让小型无人机侦察系统具备类似大型侦察平台对地宽区域扫描的能力[2],可以极大地提升小型无人机侦察系统的综合效能,为拓展可执行任务的样式创造有利条件。
应用于小型无人机侦察系统的两轴光电载荷一般可分为方位-俯仰构型与横滚-俯仰构型两种结构。方位-俯仰结构光电载荷可方便地实现前向对地宽区域扫描搜索[3-4],但载荷挂载时突出机身包络的结构部分容易破坏平台气动外形,增加飞行阻力[5]。横滚-俯仰结构光电载荷能方便地实现与平台外形整合,气动干扰较小,主要应用于高空、高速平台,实现对平台下方或侧下方区域扫描搜索[6-10]。对于有较长航时要求的小型无人机侦察平台,若采用横滚-俯仰结构光电载荷并以低空飞行状态实现前向对地宽区域扫描(简称为宽区域扫描),无疑是高效且安全的技术方案[11],但目前还鲜有对横滚-俯仰结构光电载荷宽区域扫描的研究。
针对上述背景,本文提出一种横滚-俯仰结构光电载荷实现宽区域扫描的方案,建立扫描搜索数学模型,给出具备在线扫描幅宽最优化能力的控制参数获取方法,为实现小型无人机平台光电载荷宽区域搜索提供理论基础。
1 扫描侦察方案
小型无人机侦察系统做低空飞行,实施宽区域扫描侦察时,横滚-俯仰结构光电载荷需工作于小俯仰角、横滚扫描状态。俯仰未作补偿状态下的横滚扫描视轴足点(视轴与地面交点)的轨迹线如图1 中的扫描轨迹1。从图1 中可以看出,随着横滚角偏离中间位置越大,视距急剧增大,在光电载荷最远作用距离限制下,将严重限制载荷有效扫描幅宽。相应的解决方案是,横滚扫描的同时俯仰进行动态补偿,使扫描轨迹线垂直于航迹地面投影线,如图1 中的扫描轨迹2,可以在光电载荷最远作用距离受限条件下,充分拓宽扫描范围。
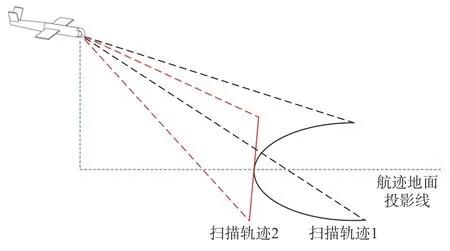
图1 横滚-俯仰结构光电载荷宽区域扫描示意图Fig.1 Wide-area scanning diagram of roll-pitch structure electro-optic payload (EO)
光电扫描有多种实现方式[12-15],鉴于小型平台所搭载的光电载荷尺寸与成本因素,可采用步进凝视方式进行扫描搜索。进行宽区域扫描时,光电载荷首先依据平台参数以及限定的内部参数,生成扫描控制参数与扫描控制坐标点,然后光电载荷逐一调转,使光轴指向预定的扫描控制坐标点。每步进调转到位后,视轴保持稳定一段时间,以获得清晰图像,然后再调转至下一扫描控制坐标点,如此循环,直至完成预定搜索。
1.1 扫描方案建模
宽区域扫描应用中,提升光电载荷扫描幅宽是技术方案的关键,需要研究实现扫描幅宽最优化的控制参数获取方法。
为便于建模,做以下设定:光电载荷执行宽区域扫描时,飞行平台作恒高、匀速直线运动;同一扫描排中不考虑平台位置变化导致的视距变化;光电载荷横滚角运动范围关于中性面(即过平台的垂线与航迹地面投影线构成的平面)对称,如图2(a)所示;光电载荷视场两维度视角差别较小,扫描参数优化时视场角统一采用控制视场 θ进行表征、计算。
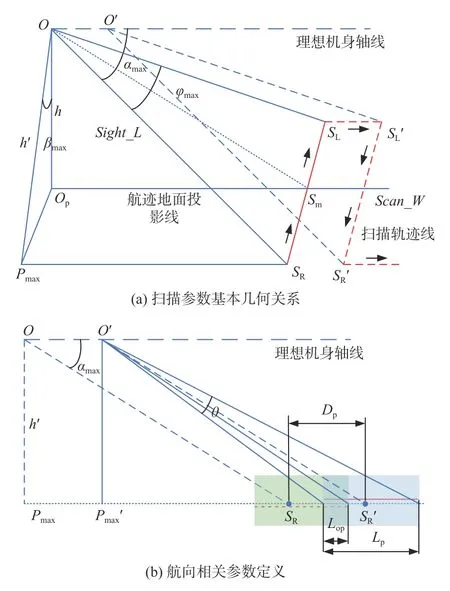
图2 光电载荷扫描数学建模示意图Fig.2 Schematic diagram of EO scanning mathematical modeling
相关参数几何关系如图2 所示。模型数学表达式为
式中:Dp为单排扫描时间对应的平台航向位移;h、v分别为平台的飞行高度与速度;t为扫描步进周期;n为单排步进数;Sight_L为单排扫描中最大视距;βmax为单排扫描中最大横滚角;αmax为最大横滚角对应的俯仰角;Lp为控制视场 θ在扫描极限面(由O、Pmax、SR构成的平面)上形成的航向对地覆盖距离;Lop为前后两扫描排的控制视场 θ在扫描极限面上形成的航向对地重叠覆盖距离;Aop为航向角重叠率;Bop为横向角重叠率;φmax为理想最大扫描视轴夹角;Scan_W为扫描幅宽。
1.2 扫描参数优化
选择 αmax、βmax和n作 为扫描控制参数,同时引入视距限S ight_Llim,对扫描过程中目标分辨能力进行约束。通过分析扫描控制参数与关联参数的内在关系,可知扫描幅宽最优时需要满足:视距取不大于且最接近视距限的数值,同时n使航向角重叠率、横向角重叠率均大于重叠率阈值且取值最小。由此不难看出,n可以作为非独立参数,其属性为:在满足视距限以及航向角重叠率限制时,n取满足横向角重叠率限制且数值最小的整数,数学表达式为
式中:C_OP为重叠率阈值,Ceil()为取不小于括号内数值的整数。
在平台飞行高度与视距限的作用下,可使用φmax替代扫描幅宽作为优化目标。参数优化数学模型为
式中:αt、αl与 βt、βl分别是 αmax、βmax的上界限和下界限。(3)式是一个两参数的单目标寻优问题,对于嵌入式计算平台,可采用带限制条件的参数域采样遍历计算法得到最优解。具体算法如下:
第一步,横滚角设为下限值;
第二步,俯仰角设为下限值;
第三步,计算视距,大于S ight_Llim则跳至第五步;
第四步,计算n及相应的Aop,若Aop在对应的横滚角下第一次小于C_OP,则记录上一参数组对应的数据,然后跳至第六步;
第五步,俯仰角累加俯仰步进角,若俯仰角未超过上限值,则跳至第三步;
第六步,横滚角累加横滚步进角,若横滚角未超过上限值,则跳至第二步;
第七步,在记录数据中寻找 φmax数值最大的参数组,该参数组即为最优参数。
2 最大扫描幅宽参数分析
最大扫描幅宽(简称扫描幅宽)是多参数综合影响的参数,通过分析扫描幅宽与对应的各参数间相互关系,可以验证参数优化方法的合理性,同时揭示扫描最优化时的参数选择规律。
扫描幅宽影响因素中与光电载荷相关的参数有:扫描步进周期、视距限及重叠率阈值;与平台相关的参数有:飞行高度、飞行速度。与光电载荷相关的参数需要依据设备性能、应用环境等进行匹配,本文仅分析平台参数对扫描幅宽的影响。
平台参数对扫描幅宽的影响采用表1 所示参数进行分析。分析中 αmax、βmax的上、下界限均分别为90°、10°,结果如图3 所示。由图3 可知,平台处于同一高度时,随着速度增加,扫描幅宽呈现阶梯状降低趋势。选取图3 中高度500 m 曲线上的点Ⅰ~点Ⅶ数据进行参数相关性分析,对应参数见表2 中序号Ⅰ~Ⅶ。其中点Ⅰ、Ⅱ、Ⅲ处于扫描幅宽的同一“平台”区间,对应的扫描幅宽相等,且由点Ⅰ~点Ⅲ,随着速度增加,航向角重叠率Aop逐渐减小,而横向角重叠率Bop则始终等于C_OP;当由点Ⅲ处进一步增加速度,此时Aop已是极限值,需要缩小 αmax、βmax以维持Aop不小于C_OP,此时n不变,致使Bop增大,见点Ⅳ数据,扫描幅宽进入“下行”区间;当速度进一步增大,αmax、βmax继续缩小,保持Aop等于C_OP,且使Bop增大至较大数值,见点Ⅴ数据;若速度继续增大,此时单排少扫一个步进也仍然可以确保Bop不小于C_OP,见点Ⅵ数据,此时幅宽进入下一“平台”区间,见点Ⅶ数据。

表1 光电扫描仿真参数Table 1 EO scanning simulation parameters
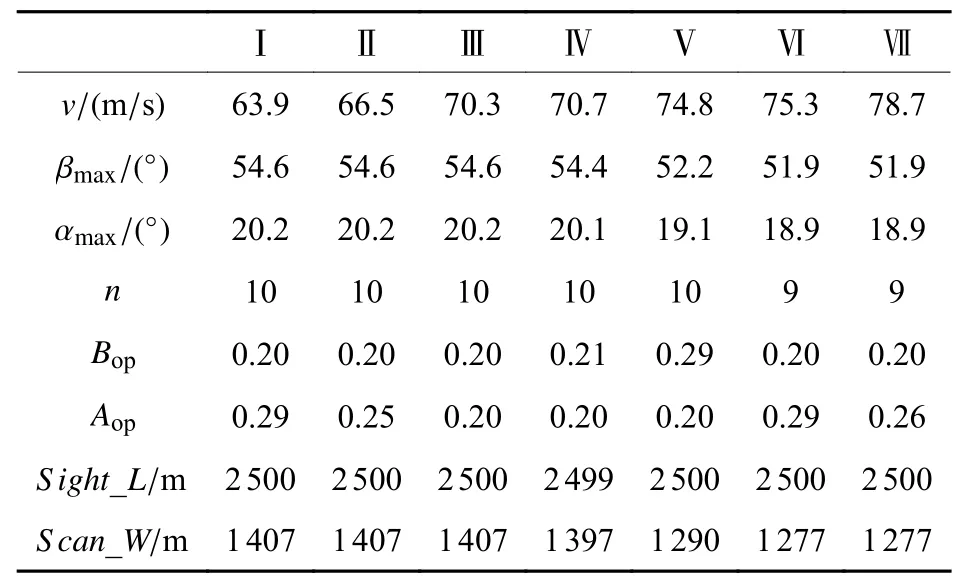
表2 宽区域扫描参数优化算例表Table 2 Example data of wide-area scanning parameters optimization
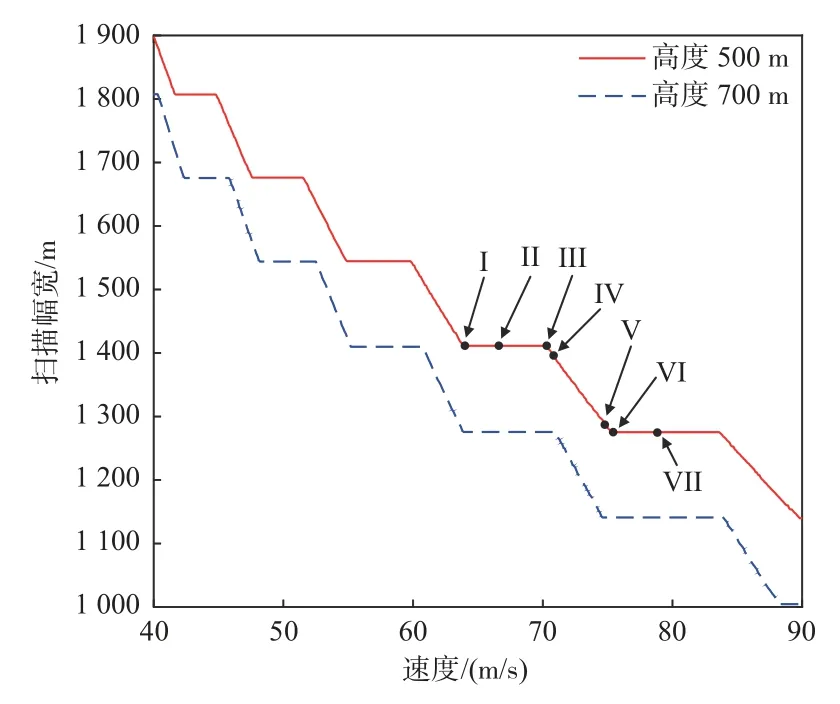
图3 平台参数与扫描幅宽相关性示意图Fig.3 Schematic diagram of correlation between platform parameters and maximum scanning width
同时注意到,在7 个数据点中,Aop与Bop至少有一个数据与C_OP相等,特别是点Ⅲ的Aop与Bop同时等于C_OP。点Ⅲ数据对应的扫描参数无疑是最优的,其他点的最优化属性可代表性地选取位于“平台”区间的点Ⅱ以及位于“下行”区间的点Ⅴ进行分析。对于点Ⅱ,数据中Bop与C_OP相等,增大αmax和 βmax,可增大 φmax,若n保持不变时,将导致Bop小于C_OP,若增大n,由于富余的航向重叠量较小,将导致Lop成为负值,出现航向漏扫,显然点Ⅱ对应的数据是最优的。对于点Ⅴ,数据中Aop与C_OP相等,增大 αmax和 βmax,可增大 φmax,若n保持不变时,将导致Aop小于C_OP,若增大n,将使Lop成为负值,出现航向漏扫,因此点Ⅴ对应的数据也是最优的。通过类似方法分析可知,优化算法获得的数据均是最佳扫描状态,优化方法是合理的。
此外,对比图3 中高度500 m 与高度700 m 数据还可知,平台飞行高度越高,相同速度下扫描幅宽越窄。此外,平台处于不同高度时可以获得相近的扫描幅宽,高度较高时对应的速度较小。
3 扫描方案测试及分析
3.1 实时性测试
基于海思HI3519A 平台进行参数寻优实时性测试,设定横滚、俯仰角参数域均为10°~90°,两轴向角度步进幅值为0.1°。扫描控制参数寻优计算耗时小于40 ms,满足实时响应需求。
在实际应用中,还可以依据情况合理设置参数域与角度步进幅值,以优化实时性指标。
3.2 扫描仿真测试
取表2 中序号Ⅲ数据进行扫描仿真。生成扫描控制点坐标的方法本文不做展开,为简化计算,扫描排中位于最外侧两端点之间的控制点坐标采用距离等分法获得。
宽区域扫描仿真结果如图4 所示。由图4 可知,在平台飞行状态稳定状态下,方案较好地实现了扫描区域连续覆盖。扫描还存在以下特点:单排扫描中,扫描点横向偏离平台航迹线的单视场投影区发生旋转并存在未覆盖的三角空白区,且偏离越远,旋转现象越显著,三角空白区范围越大;此外,横向、航向视场重叠性并不是固定的,横向偏离平台航迹线越远,同排间相邻视场重叠部分逐渐减小,排间航向对应的相邻视场重叠部分也逐渐减小。
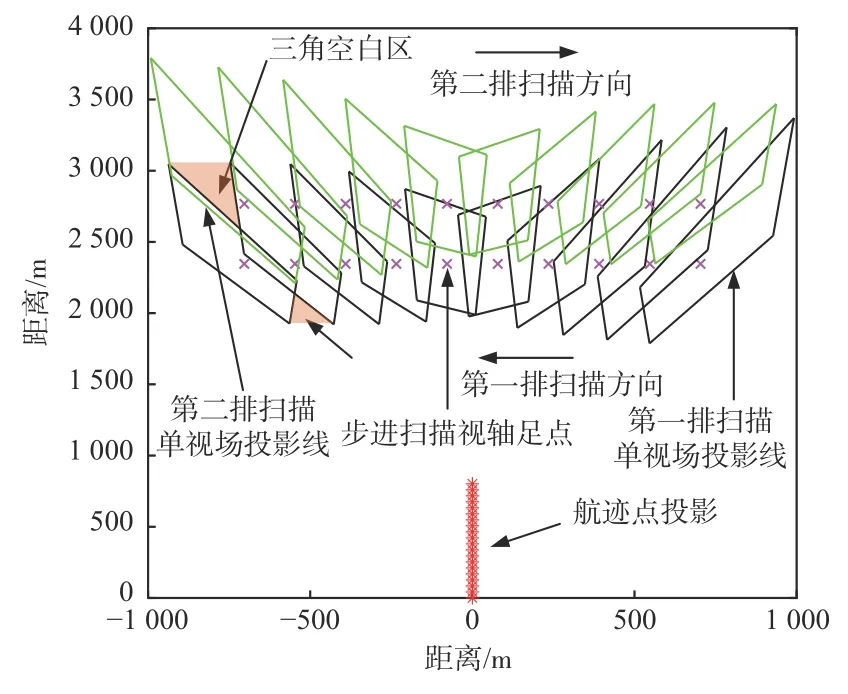
图4 宽区域扫描仿真图Fig.4 Simulation diagram of wide-area scanning
3.3 扫描挂飞测试
采用直升机平台进行挂飞测试,测试平台及测试过程中的平台参数如图5 所示。由图5 可知,直升机平台的高度、姿态以及速度状态保持得并不好。
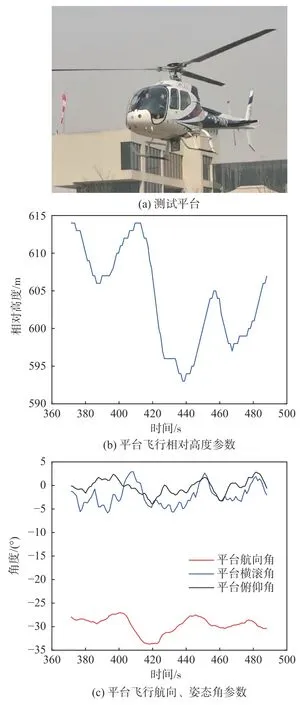
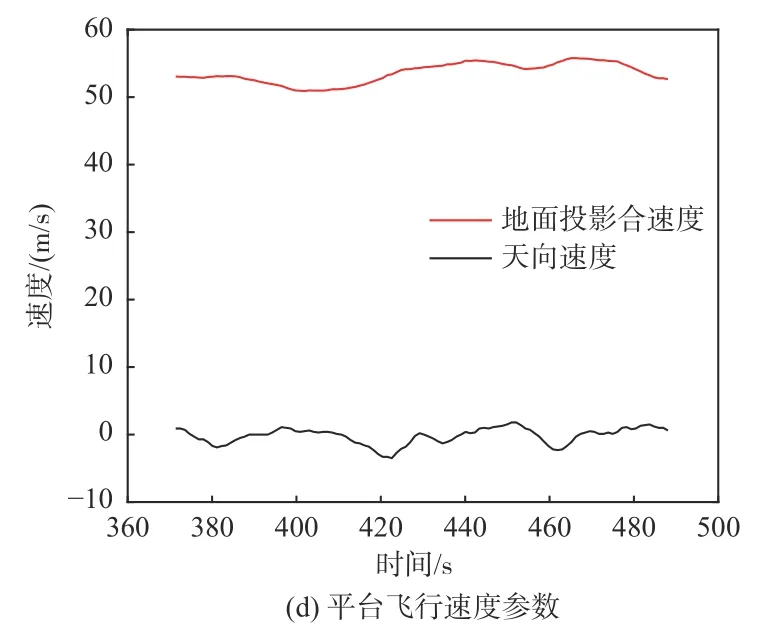
图5 宽区域扫描测试平台及飞行参数Fig.5 Test platform of wide-area scanning and flight parameters
选取图5 中平台飞行参数对应时刻记录的光电载荷扫描参数,复盘光电载荷宽区域扫描态势,结果如图6 所示。由图6 可知,实际扫描视轴足点与扫描控制点吻合得较好,个别位置存在一定偏差量以及“漏扫点”现象;除扫描边缘部分存在局部未覆盖区与“漏扫点”外,其他区域实现了扫描全覆盖。
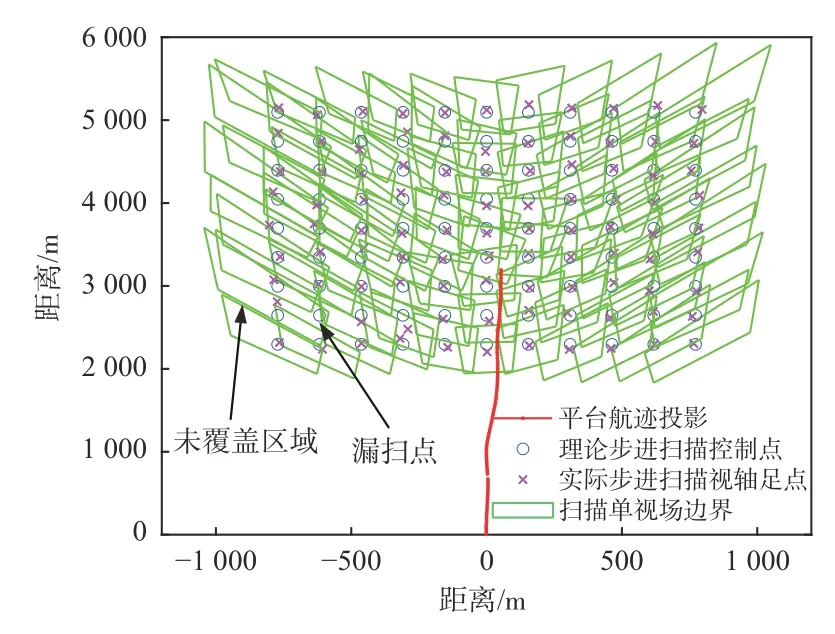
图6 光电载荷宽区域扫描飞行测试图Fig.6 Flight test diagram of EO wide-area scanning
结合平台飞行状态,分析光电扫描复盘数据,可以形成以下判断:
1)平台扰动较大情况下,光电载荷依据地理坐标仍较好地实现了区域扫描。
2)实际扫描视轴足点与控制点位置存在偏差量及“漏扫点”,与扫描控制算法中采用的到位判断逻辑有关,判据是角偏差小于阈值且维持一定时间。阈值量本身即会引入一定偏差,而平台扰动过于剧烈,则会使判断逻辑中的时间条件无法满足,导致扫描步进判断为“未到位”,即产生“漏扫点”现象。
3)扫描边缘存在局部未覆盖区与扫描边缘重叠率减小有关,当平台扰动较大时容易产生相邻视场不重叠的情况。
针对序号2)问题,可以通过采取隔振措施弱化扰动影响,以及优化到位判断逻辑予以解决。针对序号3)问题,在平台扰动无法消除的情况下,可采取将两端最外侧扫描控制点之间的区域作为有效覆盖范围,或通过增大重叠率阈值补偿扰动予以解决。
4 结论
横滚-俯仰结构光电载荷采用横滚步进扫描和俯仰动态补偿的方式,可以较好地实现前向对地宽区域扫描。提出的扫描参数优化方法可以较方便地获得扫描控制参数且实时性较好,光电载荷调转光轴依次指向地理扫描控制点的扫描方法,具有较好的平台扰动适应性。
此外,扫描过程中视场重叠率是动态变化的,且越靠近扫描边缘,相邻视场间重叠范围越小。计算中重叠率阈值取值需在确保扫描效率的同时,避免动态扰动导致的扫描边缘出现漏扫情况。
