多智能体系统圆形编队控制与一致性
2024-02-05肖斯斯
张 华,杨 艳,肖斯斯
(重庆理工大学 理学院, 重庆 400054)
0 引言
萤火虫闪烁、鱼群觅食、候鸟编队飞行等动物集群运动是自然界和人类社会中的常见现象。集群运动作为组织高效、能耗最低的自组织行为[1],已引起国内外学者的广泛关注。而多智能体系统的协调与编队控制是研究热点之一,控制目的是设计一组控制器使得智能体系统形成或保持稳定的几何形状[2]。目前,多智能体系统的协调与编队控制被广泛应用于无人机(UAV)[3]和航天器的编队控制[4]、协同机器人[5]、传感器网络[6]等领域。其中,圆形编队问题研究是该领域的一个重要分支[7],在现实生活中具有广泛应用,如目标跟踪[8]、环球导航[9]、诱捕[10]等。
在过去的几十年中,学者们一直致力研究群体生物的迁移和聚集行为,以及衍生行为(包括避障、觅食和目标跟踪)。考虑到运动模式约束,圆形编队问题具有普遍性和广阔的工程应用前景,其中涉及环动力学的研究近年来受到了大量关注。例如,Sepulchre等[11]考虑了完全耦合的网络结构的平面粒子模型,粒子以恒定速度移动,通过应用基于势函数的控制律来实现圆周运动,并利用转向控制律改变其相位;Sepulchre等[12]进一步将其推广到一般通信拓扑网络结构;Jain等[13]进一步研究了相位同步和平衡的圆形编队问题。同步意味着每个智能体与其他智能体在相同时间方向上移动时的情况[14]。平衡的圆形编队意味着所有智能体相对于固定中心移动时的情况,该中心代表智能体的平均位置[15-16]。Jain假设每个智能体最初围绕具有不同半径和不同中心的单个圆移动的情况下,智能体在围绕公共圆的集体圆形运动中具有稳定性[17],并进一步利用有界势函数分析了轨迹约束区域[18-19]。
需要注意,上述文献中的所有模型都基于多智能体系统中所有智能体的速度是常数且相等。而具有非恒同速度的智能体系统的运动协调问题更具有复杂性和挑战性,在无人机应用方面更具实际意义。鉴于此,Allgower等[20]研究了具有不同固定速度的智能体的圆形编队控制问题,并分析了编队的螺旋运动特性。但以上模型中的智能体都围绕公圆运动。近几年,Liu等[21]提出了一种新的控制器,通过为每个智能体定义一个虚拟中心,使得智能体渐近收敛到覆盖区域上的质心Voronoi划分。Sun等[22]针对一组具有不同匀速约束的单环形智能体,设计并实现了几种不同的编队方法。Chen等[23]提出了一种控制方法,使编队飞行器收敛于以中心为时变参考的圆形运动。
上述讨论均基于系统的初始角频率一致的情况,而本文重点针对具有非恒同速度的智能体系统提出了2种编队方法,即基于位置方法和基于位移方法[24],能够使智能体系统的运动轨迹渐近稳定于圆形队形,其中智能体的初始状态(角频率、相位、位置状态)是随机、不同的,从理论上证明了如何形成期望的轨迹。本文的主要贡献包括:第一,给出了作用于相位上以通过控制智能体的方向来实现期望的圆形队形的2种方法,即基于位置方法和基于位移方法,其中队形的排列通过圆心来定义;第二,确定拉普拉斯相势,利用其梯度定义相位控制,并协调了相位控制与编队控制之间的稳定性,进而使得智能体实现相位同步或相位平衡;第三,研究的多智能体系统的初始角频率是随机且不一致的,设计反馈控制器作用于角频率,使得角频率渐近一致且收敛到指定的值。
1 预备知识

2 模型介绍
设第k个智能体的动力学方程为
(1)
其中:复数rk=xk+iyk∈Z表示第k个智能体的位置;θk为其相位;vk为其线速度;wk∈R为其角频率。记w=[w1,w2,…,wN]T∈RN。当wk>0时,智能体沿顺时针方向旋转;当wk<0时,智能体沿逆时针方向旋转[20]。uk∈R和μk∈R分别为作用在第k个智能体的反馈控制器,分别控制其运动方向和角频率。
对于具有非恒同速度的智能体,如果控制器uk=μk=0,wk=w0(w0是一个非零常数),则所有智能体做圆周运动,旋转半径为ρk=vk/|w0|,旋转方向由w0的正负决定。定义智能体沿顺时针方向运动,则w0>0。第k个智能体的中心为ck=rk+iρkeiθk。智能体的编队形状将用中心位置ck定义,记c=[c1,c2,…,cN]T。
在实际应用中需要同时控制智能体系统的队形和运动航向,这需要队形控制与相位控制相结合,其目的是同时控制智能体的相位并实现编队队形。在本文中将控制器uk分为2部分:

(2)

基于有限通讯网络结构对应的拉普拉斯矩阵,定义系统(1)的拉普拉斯相势为[1]

(3)

(4)
其中:w0为期望角频率;K>0是一个常数。
为实现期望的角频率,使得具有不同初始角频率的智能体以期望的角频率运动,设计一个控制器μk作用于角频率,则有

(5)
3 编队设计与结果说明
针对任意初始状态具有非恒同速度的多智能体系统编队控制问题,讨论将一组智能体绕公圆运动的结果扩展到稳定的非公圆队形。通过基于位置方法和基于位移方法来设计智能体的编队控制器。
3.1 基于位置方法


(6)
其中,λ>0。
定理1考虑N个具有非恒同速度的多智能体系统(1)。在控制器(4)、(5)和(6)的同时作用下,当K<0时,智能体的频率w(t)收敛于期望频率,并实现相位同步。此外,位置r(t)的所有解收敛于圆周运动,并实现了期望的队形。
证明定义Lyapunov函数

(7)
则V1沿系统(1)的轨线关于时间的导数为
(8)


O1(r,θ,w)={r,θ,w|uk=0;wk=w0}
(9)

(10)


定理2考虑K>0个具有非恒同速度的智能体系统(1),在控制器(4)、(5)和(6)的同时作用下,当K>0时,智能体的频率w(t)收敛于期望频率,并实现相位平衡;位置r(t)的所有解收敛于圆周运动,并实现期望的队形排列。
证明定义Lyapunov函数
(11)
式(11)沿系统(2)的时间导数为

(12)
O2={(r,θ,w)|uk=0,wk-w0=0}
(13)

注1定理1和定理2的目的是使得一组具有非恒同巡航速度的智能体在任意初始状态的无序运动情况下稳定到一个单一固定中心的圆周运动,其中各自的圆心互不相同。在结果中,每个智能体的轨迹都围绕单个的中心运动,这确定了所需要的运动形状。此外,基于位置方法的控制策略没有使用智能体之间的耦合通讯关系,每个智能体不使用其他智能体相关的期望位置信息。但是这种队形定义方式需要智能体获得自己在全局坐标系下的位置,因此对传感器测量能力要求较高。
3.2 基于位移方法

(14)

定理3考虑N个具有非恒同速度的智能体系统(1)。在控制器(4)、(5)和(14)的同时作用下,当K<0时,智能体的频率w(t)收敛于期望频率,并实现相位同步;位置r(t)的所有解收敛于圆周运动,并实现期望的队形排列。
证明定义Lyapunov函数
(15)
V3沿动力学系统(1)的时间上的导数为


O3(r,θ,w)={r,θ,w|uk=0;wk=w0}
(16)


(17)
定理4考虑N个具有非恒同速度的智能体系统(1),在控制器(4)、(5)和(14)的同时作用下,当K>0时,智能体的频率w(t)收敛于期望频率,并实现相位同步;位置r(t)的所有解收敛于圆周运动,并实现期望的队形排列。
证明定义Lyapunov函数
(18)
V4沿动力学系统(1)的时间上的导数为

O4(r,θ,w)={r,θ,w|uk=0;wk=w0}
(19)
注2与基于位置方法不同的是,基于位移方法只需要每个智能体在局部坐标系下可以实时获得自己与其邻居的位移。当所有智能体与其邻居之间的当前位移达到期望位移时,多智能体系统实现了期望队形。该控制原理仅要求智能体获得在局部坐标下与其相邻智能体之间的位移,故智能体之间的通讯满足连通条件即可。
注3式(9)、(13)、(16)和(19)分别定义了系统解的不变集。这4个不变集看起来类似,实际是不同的。O1和O3包含的是同步的相位解,O2和O4包含的是平衡的相位解。此外,O1和O2包含的位置r(t)解是基于位置方法下智能体的运动轨迹,O3和O4包含的位置r(t)解是基于位移方法下智能体的运动轨迹。
4 仿真模拟
4.1 参数初始化
在模拟过程中,多智能体系统由5个智能体组成,每个智能体的初始参数设置如表1所示。
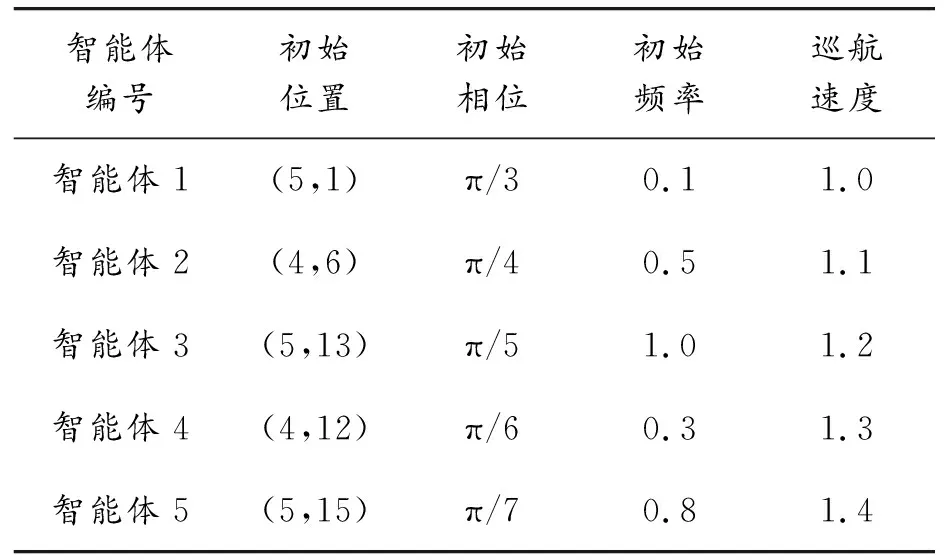
表1 系统初始参数设置

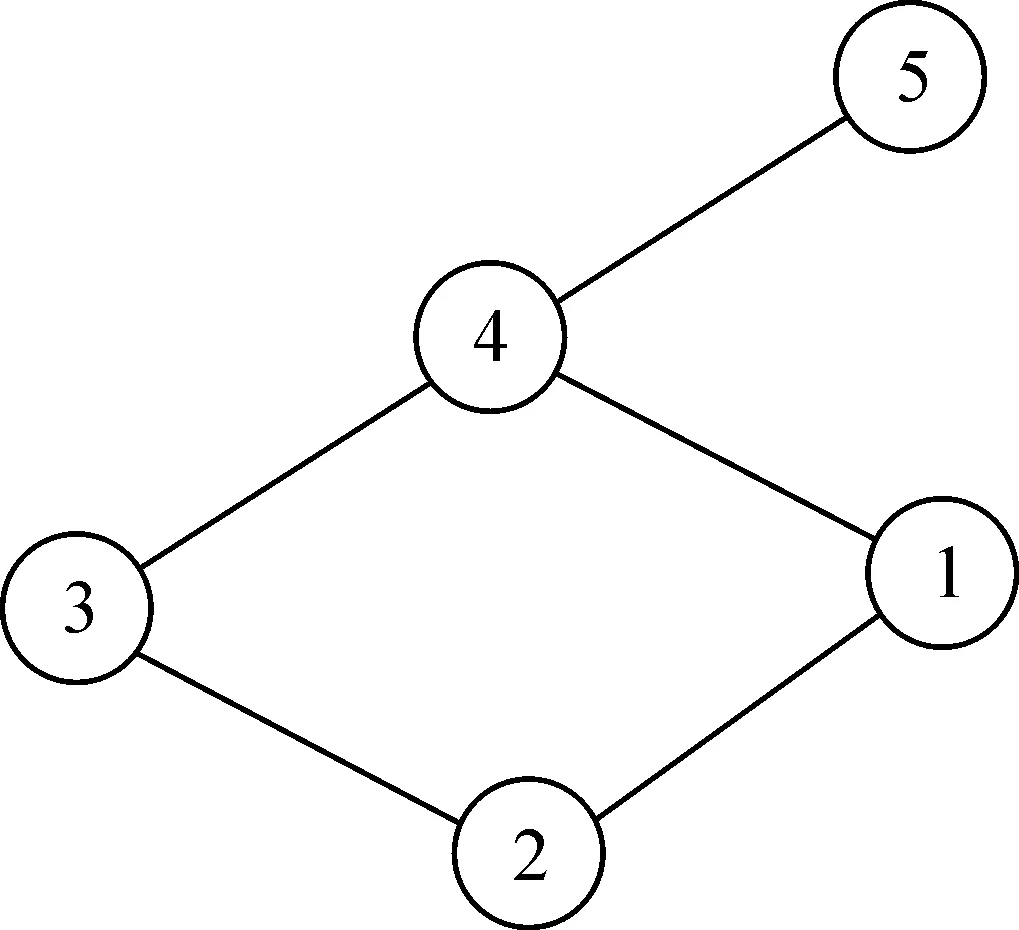
图1 能体系统通讯拓扑图
4.2 多智能体编队模拟及结果
首先考虑基于位置的情况,结合控制律(4),(5),(6),在图2中,(a)显示了耦合强度K=-1.5时多智能体系统在600 s的时间内绕着期望中心运动的运动轨迹,(b)显示了在585.2~600 s时间段内智能体的运动轨迹,在该时间段内智能体运动了4个周期,此时智能体的运动圆心分别为(5.008 1,1.992),(5.005 7,5.998 3),(5.009 6,9.990 7),(5.018 4,13.974 7),(5.006 5,17.989),渐近收敛到期望圆心,由此可验证定理1中多智能体系统实现了基于位置方法的编队形状的稳定性。图3显示了定理1中耦合强度K=-1.5智能体系统的频率收敛于期望频率。图4显示了耦合强度K=-1.5时势函数收敛到最小值,K=1.5时势函数收敛到最大值,由此可以验证,定理1和定理2中的相位收敛于同步状态或平衡状态。
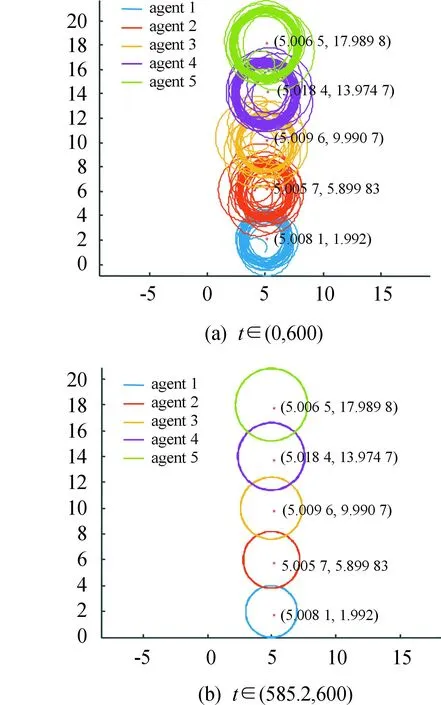
图2 K=-1.5时多智能体系统运动轨迹
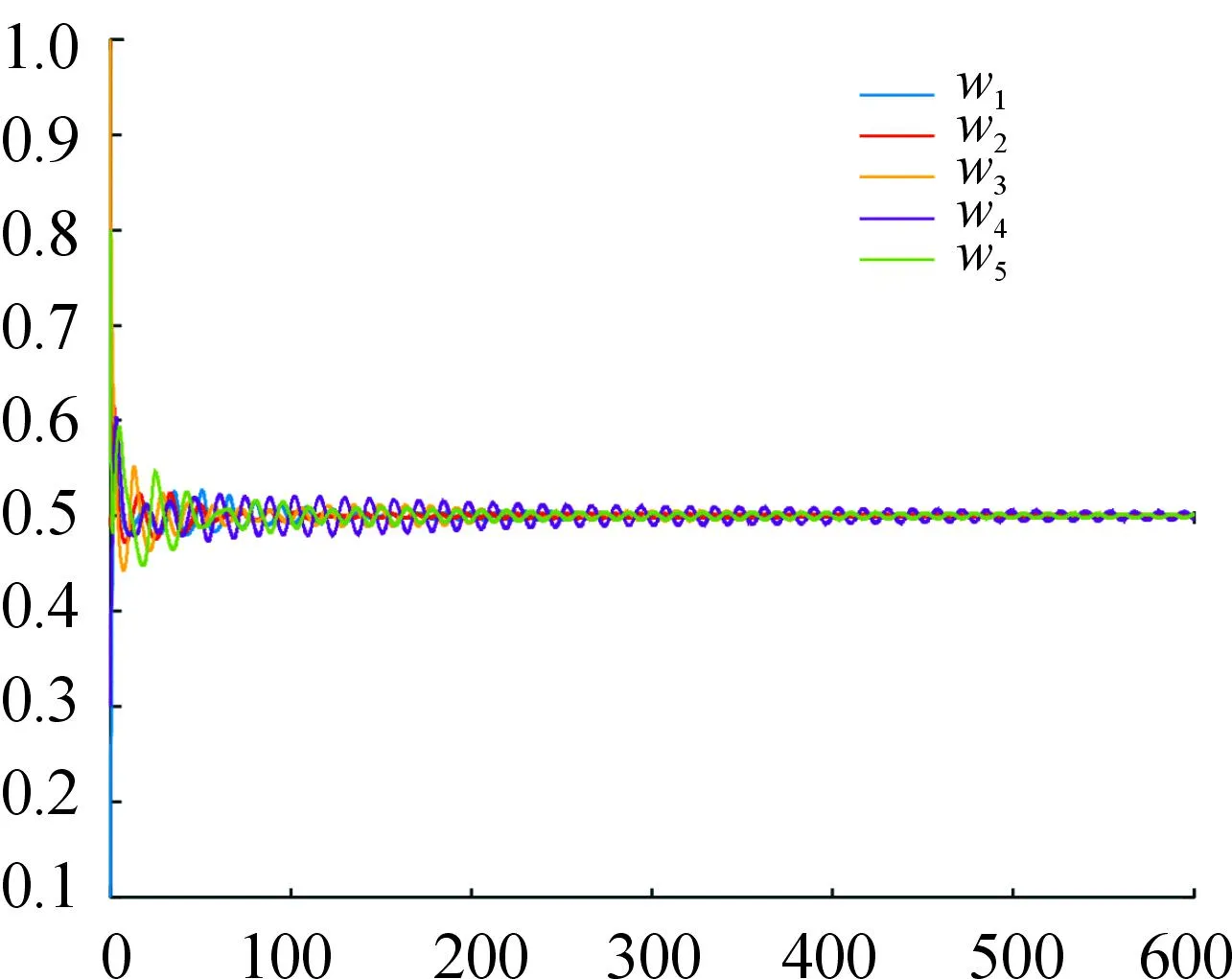
图3 K=-1.5时角频率与时间关系

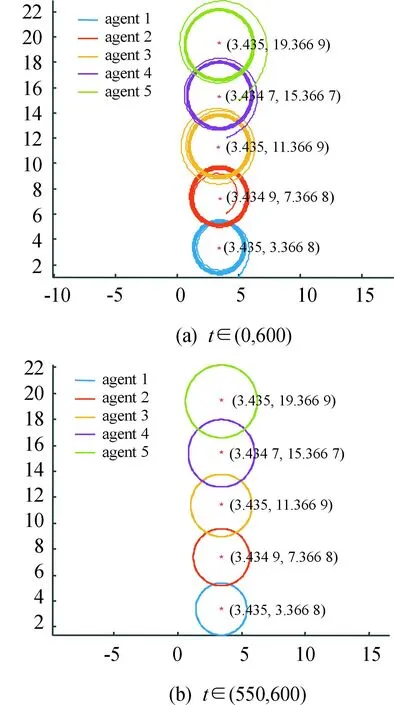
图5 基于位移方法下K=-1.5时多智能体系统运动轨迹

图6 K=-1.5时角频率与时间关系
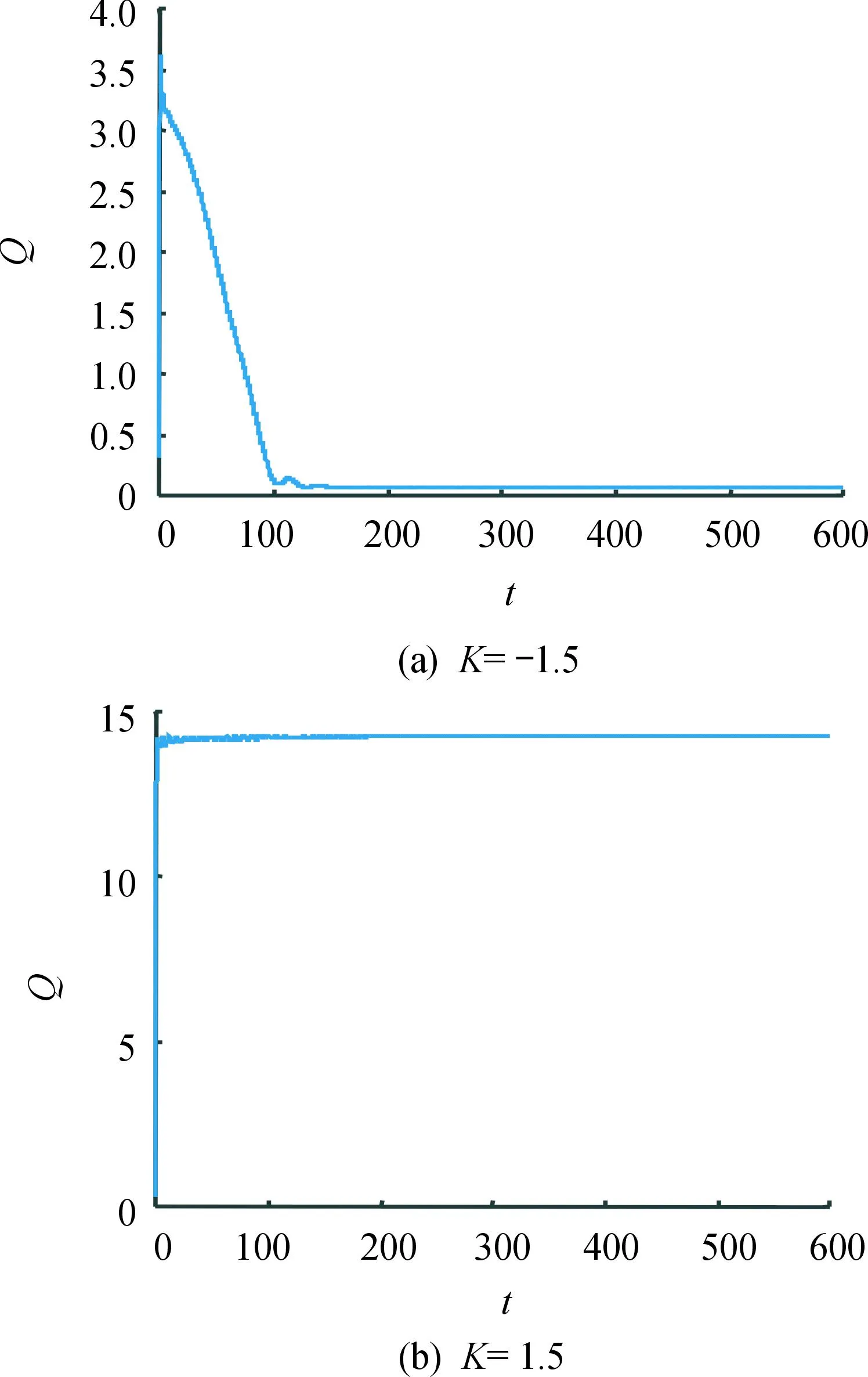
图7 基于位移方法下势函数曲线
对基于位置方法和基于位移方法的模拟结果进行对比,定义的期望中心一致,但智能体的运动状态轨迹显示,图2中5个智能体的圆心分别渐近收敛到如下位置:(4.990 8,17.976 7),(4.966 0,1.952 0),(4.972 6,9.994 6),(4.978 5,6.015 5),(4.980 3,1.996 8);而图5中的5个智能体的圆心收敛到期望的自身与其邻居的相对位移,分别为(-0.000 1,4.000 0),(0.000 1,4.000 1),(-0.000 3,3.999 8),(0.000 3,4.000 2)。存在差异性的原因是2种方法的控制原理不同,主要在于基于位置方法下的智能体在运动时能够感知自身的期望中心位置,因为通讯要求是获得自己在全局坐标系下的位置;基于位移方法中智能体需要感知自身与其邻居之间的相对中心位置,进而实现编队。
5 结论
1) 要实现期望的编队运动需要智能体的相位达到同步或平衡。通过拉普拉斯势函数实现对智能体群线性动量的控制。在相位同步过程中智能体群线性动量达到全局最小值;在相位达到平衡过程中智能体群线性动量达到全局最大值。
2) 多智能体系统能以指定的角频率实现期望的编队队形。重点分析了如何利用2种方法设计编队控制器,其原理是通过智能体之间的测量方式和能力确定不同的几何形状。论证结果表明智能体实现所需的形状与稳定的圆周运动,且角频率渐近一致收敛到指定值。
3) 数值模拟结果截取的最后4个周期运动轨迹表明该组智能体运动轨迹的稳定性,还表明系统的初始状态和参数都会影响系统的收敛速度。未来研究将以此为切入点,分析讨论收敛速度和各参数之间的关系。
