大时滞过程控制方法比较研究
2024-02-03陈宇昊王玎楠朱建国郑天歆
陈宇昊, 王玎楠, 朱建国, 郑天歆
(1.中国空空导弹研究院, 河南洛阳 471009; 2.中国人民解放军95607 部队, 四川成都 610011;3.空装外场局, 北京 100038; 4.中国人民解放军94314 部队, 河南郑州 450000)
0 引言
时滞现象是一种时间上的延迟, 是指系统的扰动不能被及时反映到控制作用上,控制作用往往滞后一定时间才能反映到对象输出上, 调节效果不能被适时反映的现象。 一般认为纯滞后时间与系统的时间常数之比θ〉0.5,则认为该过程为大时滞过程。
1 内模控制方法研究
1.1 内模控制的研究状况
内模控制(IMC)主要特点是结构简单、设计直观简便,具有较少的在线调节参数和易于调整的特点。典型的设计方法包括零极点对消、预测控制、自适应IMC、采用模糊决策和仿人控制等。此外,IMC 还具有良好的鲁棒性能、跟踪性能和动态性能等控制性能[1]。
1.2 内模控制原理
内模控制等效结构图如图1 所示。

图1 内模控制等效结构
根据图1 可得式:

1.3 内模控制器的设计
第一步:分解对象模型

Gm+(s)包含Gm(s)中的纯滞后环节和右半S 平面的零点,且|Gm+(s)|=1,∀ω
通常,Gm+(s)形式如下:
第二步:模型误差的鲁棒性设计
为了能够抑制模型误差对系统的影响、 增强系统的鲁棒性,在内模控制器中加入低通滤波器F(s),一般情况下F(s)只需要取如下形式:
取n 为1。 λ 为时间常数,一般情况下取(0.1-2)λ,选取(0.1,0.5,1.2)τ,使得λ=5,25,50,100。 按照λ 的四种可能分别进行仿真,得如图2 所示。 比较得知λ 取5 时仿真效果最好,可得出内模控制器为:

图2 分别取5,25,50,100 时的仿真图
1.4 内模控制器的仿真研究
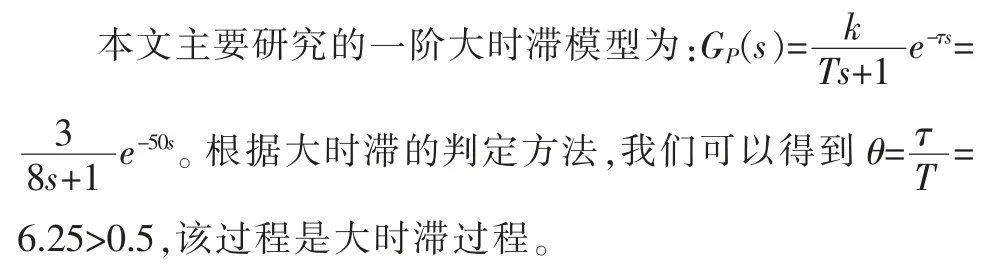
系统给定点输入r(t)=1(t),扰动输入d(t)=0.1×1(t-700),根据扰动D(s)加在Gp(s)之后的仿真图与加在其之前的仿真结果对比如图3 所示。
图3 扰动加在对象之后
分析仿真图可得,扰动加在之前时,它的反应时间相较于加在之后延迟了50s,加在之前的系统对扰动的反应明显更强烈,超调更大,但最终都能较快的归于稳定。
2 史密斯预估控制方法研究
2.1 史密斯预估控制的研究状况
Smith 预估控制的主要目的是对纯滞后进行补偿,通过一个预估模型来估计对象的动态特性, 并将无时滞的被控量反馈给控制器,从而提高系统的控制效果[2]。
2.2 Smith 预估补偿控制原理
Smith 预估补偿控制是一种有效的克服纯滞后的控制方法。 基本原理是在控制器上并联一个补偿环节,用于补偿受控对象中的纯滞后部分。
史密斯预估控制的原理框图如上所示,图中Gc'(s)为控制器的传递函数,Gp(s)=Gp0(s)e-ts为时滞对象的传递函数,Gm(s)=Gm0(s)e-rs是系统的预估模型。
由图4 可以导出闭环系统的传递函数为:
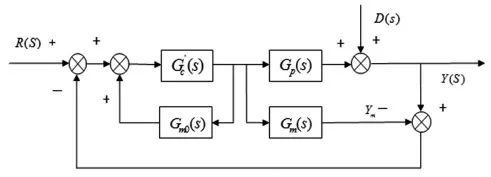
图4 史密斯预估控制系统

图5 改进的Smith 预估控制系统

图6 Smith 预估控制
经过Smith 预估控制后,系统的特征方程已经不包含纯滞后项, 从而使系统的控制性能大大改善。 实际上,Smith 预估器的模型参数与被控时滞对象肯定存在误差,因此系统的特征方程仍然带有时滞因素。
2.3 改进后的Smith 预估器
本文提供一种表现出色的改进方案。该改进方案旨在提高常规Smith 预估控制系统的性能,同时保持简单易实施的优势。 通过减小稳定域极限的压力,该改进方案成功克服了常规Smith 预估控制系统的局限性。 其结构如下:
最显著优化方案就是用Gn0(0)代替了原来的Gm0(0)。该系统对参考输入的稳态误差为零, 同时对扰动具有抑制作用。
2.4 Smith 预估控制器的仿真
由之前的设计选择, 组成Smith 控制的Simulink 仿真图,再根据需要在仿真的同时调试参数,并且在时间t=200s 时加入一个幅值为1 的阶跃扰动,可得结果如下:
由上图的仿真结果可观察得到,Smith 预估控制方式的目标值跟踪特性较好,其抗扰性能较好,消灭静态误差的能力也很强。
3 PID 控制方法研究
3.1 PID 控制方法的研究状况
工业控制过程中,目前最广泛应用的控制方法是PID控制,因其结构简单、稳定性好、通用性强、鲁棒性好、可靠性高及使用方便等优点,成为最通用的控制方法。 PID控制的一个重要问题是参数整定, 即确定控制器的比例度、积分时间和微分时间[3]。
3.2 PID 控制原理及算法
图7 是典型PID 控制系统结构图, 在PID 调节器作用下对误差信号分别进行比例、积分、微分组合控制,调节器的输出作为被控对象的输入控制量。 PID 控制器是一种线性控制器,它根据给定值r(t)与实际输出值y(t)构成控制偏差。
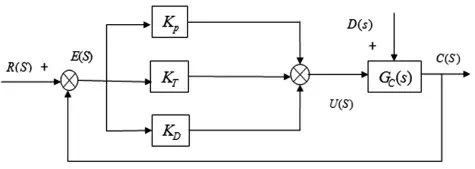
图7 典型PID 控制系统结构图
PID 的控制规律为:
为有效提升房建监理质量,应当提升从业人员的职业水平、专业素养,保证监理人员始终具有高度的责任心、对整个工程的质量进行监管,对居住者的生命财产健康负责。因此,在进行房屋建设监理时,需要事先对监理计划进行制定、预先选择有效的监理措施,对相关不安全因素进行预防,降低质量问题发生几率。除此之外,监理从业人员,需要具备过硬的专业素养,可认真细致的检查工程实际情况,工作严谨、态度认真,脚踏实地、注意细节。严格按照相关规定进行细节检查,透过现象看本质,提升质量监理的有效性。
相应的传递函数为:
式中:KP—比例系数;TI—积分时间常数;TD—微分时间常数。
而通常干扰通道中还会有纯滞后环节, 使被调参数的响应时间滞后一个值τ,即Yτ(t)=Y(t-τ),表明调节过程沿时间轴平移了一个τ 的距离, 所以干扰通道出现有纯滞后不会影响系统调节质量, 但干扰进入系统中的不同位置也会产生不同的作用。
PID 控制器各个校正环节的作用如下:
比例环节:系统的响应速度和调节精度同KP呈正相关, 但KP过大则会产生超调,KP过小则会使响应速度变慢,使系统静动态特性变坏。
微分环节: 微分作用系数Kd可以改善系统的动态性能,但Kd过大会使系统的调节时间延长,抗干扰性能降低。
积分环节:积分时间常数Ti越大积分作用越弱,反之则越强。积分作用系数Ki可以消除系统的稳态误差,但Ki过大会在响应过程产生较大超调,产生积分饱和现象,过小则会使系统稳态误差不易消除。
3.3 PID 控制参数整定方法
一般情况下,PID 控制器的参数整定方法包括比例系数KP、积分时间Ti和微分时间Td这三个参数的选取。 调节器参数的整定方法通常可以分为两大类: 一种是理论计算整定法;另一种方法是工程整定法。 在工程中应用较多的是工程整定法,如临界比例度法、衰减曲线法、经验试凑法和反应曲线法。
3.4 PID 参数整定
本文是在Matlab 环境下进行设计与仿真。 依据主动悬架系统性能指标要求和一些基本的整定参数的经验,选择不同的PID 参数进行仿真。 辅以Z-N 整定,这样既直观方便、计算量小,又便于调整与改进。
(1)只加入比例作用,求出系统等幅振荡时的Ku、Tu
用二分法试凑出比例调节器能产生等幅振荡时的Ku为0.37,由图8(b)得出的Tu有三组数据,分别为118.5、117.1、115.6,三个数据平均值可得Tu≈117.1。
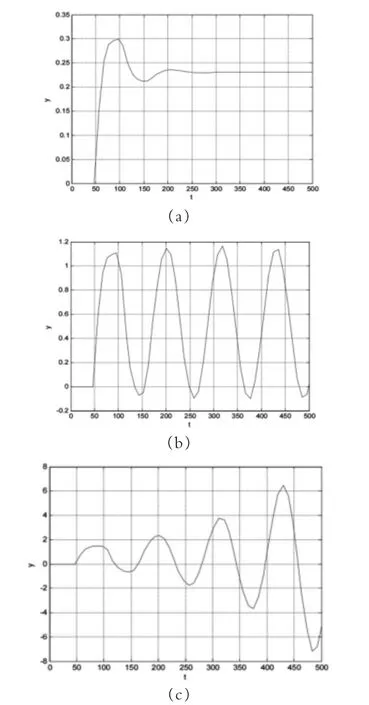
图8 不同Ku 时的仿真图
此时处在收敛状态,应该适当增大Ku。图8(a)图中仿真稳定值为0.22 左右,远远小于预定值1,图8(c)中Ku增至0.5 后发现曲线呈发散状态, 由二分法最终确定Ku取0.37 时系统等幅振荡效果最佳。
(2)已知Ku=0.37,Tu=117.1,当比例、积分、微分都起作用即PID 控制时:
Kp=0.6Ku=0.222,
则有:观察图9 可知,虽然PID 控制器的各项参数都是通过理论计算得到的,但仿真结果并不理想。而图10中是按理想状态下的参数来的,依然在振荡。尝试着继续减小Kp的值,消除静差的速度变快,但是以牺牲响应速度为代价的。

图9 PID 控制
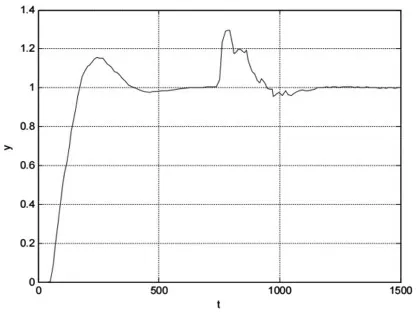
图10 调整后的PID 控制
适当继续减小Kp的值,可得到图10 中Kp为0.01 时的仿真结果,系统的稳定性变好但抗扰性能一般。即Kp减小时,系统跟踪性能变差。
4 控制方法的比较研究
在参数匹配时,内模控制的上升时间很短,动态响应速度较快、无超调、稳定性较好;PID 控制方式的上升时间要长,动态响应速度较慢,有一定的超调,稳定性稍差;PID 控制方式各方面的性能均差于内模控制方式[4]。
在参数失配时,在加入扰动后PID 控制系统的响应较大,波形出现较大波动,抗扰性较差。T 的增大对内模控制系统和PID 控制系统都起到优化的作用。 对于经调整后的PID 控制方式,τ 的增加对系统影响较小。 对于内模控制方式, τ 的增加对系统产生的影响表现在鲁棒性较差。其次,对于K,Τ,τ 减小后的仿真结果显示,K 的减小使PID 控制方式的系统鲁棒性和抗扰性都变好,但内模控制方式的动态响应速度变差。T 的减小对内模和PID 控制方式的影响都较小。 T 的减小并没有因为减小时滞而改善系统的控制品质,而是出现了负振荡。
5 结论
对于一个大时滞系统来说,PID 控制方式的系统除了抗扰性差之外,动态响应特性和鲁棒性相对较好。 PID 控制方式对参数不敏感,只要K,Τ,τ 发生变化,系统就会相应地发生变化。 根据上面的研究,K,Τ 的增加而τ 不变较有利于提高系统的控制品质。
