基于高速相位调制器的超快偏振控制
2020-06-15蒲国庆义理林
张 力,蒲国庆,义理林
(上海交通大学 区域光纤通信网与新型光通信系统国家重点实验室,上海 200240)
0 引 言
近几十年来,随着光纤通信系统传输速率的提高,偏振控制技术得到了广泛关注。其中,扰偏和稳偏技术是研究的重点,并且取得了不错的研究成果[1-2]。偏振控制器(Polarization Controller,PC)的响应速度对于扰偏和稳偏技术的性能至关重要[3]。在过去的相关研究中,大多数PC的响应速度仅在ms或μs级别,如基于延迟片、液晶、光纤挤压器以及波导的PC[4-10]。其中,一个基于波导的PC在磷化铟(InP)上集成了有源InGaAlAs/InAlAs多量子阱移相器和无源半脊偏振转换器,实现了低于5 ns的响应速度,这是目前所知最快的偏振控制之一[10]。而目前最快的商用PC则是基于铌酸锂(LiNbO3)的PC,其响应速度在ns级别。然而,在需要更高速扰偏时或为了应对更高速的偏振态(State of Polarization,SOP)变化时(如闪电引起光纤中SOP的瞬时变化),PC的响应速度就成了扰偏和稳偏性能的瓶颈。为了进一步提高响应速度,本文提出了一种基于商用低速电控偏振控制器(Electronic Polarization Controller,EPC)和高速LiNbO3相位调制器(Phase Modulator,PM)的新型光学结构,实现了超快响应速度的偏振控制。
1 实验设计
1.1 超快偏振控制系统结构介绍
本实验的主要思想是使用具有μs级响应速度的EPC和具有ps级响应速度的PM来实现具有ps级响应速度的超快偏振控制。具体来说,任何完全偏振光都可以分解为两个相互正交的线偏光,并且这两个线偏光的幅度和相位差是确定的。在本实验结构中,EPC用来改变初始SOP,由于EPC的响应速度是μs量级的,所以两个正交线偏光的幅度和相位差会以μs级响应速度变化。然后PM进一步改变两个正交线偏光的相位差,其响应速度是ps级的。因此,可以通过慢速偏振控制和快速相位调制的组合来实现超快偏振控制,并且所实现PC的响应速度等于PM的响应速度,可达到ps级。
超快偏振控制系统结构如图1所示,工作波长为1 550 nm的激光器输出功率为6 dBm的完全偏振光。系统中所用的EPC是美国Lightwave2020公司的商用PC,响应速度低于10 μs,插入损耗约为1.2 dB。此EPC可以由4个0~150 V直流电压驱动,每个产生0~π的相位延迟,从而能够产生庞加莱球上所有可能的SOP。现场可编程门阵列(Field Programmable Gate Array, FPGA)用于生成4个随机序列,然后由4个12位分辨率175 MSa/s更新速率的数模转换器(Digital Analog Converter, DAC)芯片将其转换为模拟信号。DAC输出信号被电压放大器放大后,产生4个0~150 V的随机电压来驱动EPC。保偏的PM用来改变快轴和慢轴上线偏光的相位。
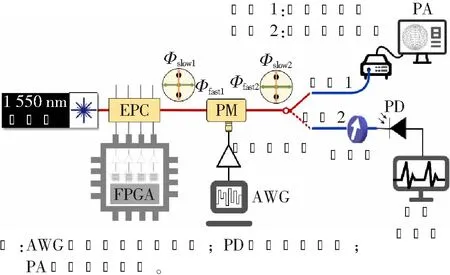
图1 超快偏振控制系统结构图
定量来分析,光的电矢量可以在空间直角坐标系中表示为分量的形式:
式中:Ex和Ey分别为保偏光纤快轴和慢轴上的电矢量;Ax和Ay分别为电矢量Ex和Ey的初始振幅;ω为光的角频率;t为光传播的时间变量;k为光的传播常数;z为光传播的距离变量;δx和δy分别为电矢量Ex和Ey的初始相位。
两个正交向量的幅度和相位差就决定了一个确定的SOP。如果我们可以任意改变两个正交矢量之间的幅度和相位差,则可以实现任意SOP,并且幅度或相位的变化速度与偏振控制的速度相对应。由于保偏光纤快轴和慢轴之间调制效率的差异,PM的驱动电压会在快轴和慢轴上引起不同的相位变化,从而在两个正交矢量之间引入相对相位差。如图1所示,在快轴上引入的相移Фfast2-Фfast1小于慢轴上的相移Фslow2-Фslow1,从而产生了两个轴的相位差。需要指出的是,通常需要较高的电压(大约为PM半波电压的4倍)才能在正交矢量之间产生相对2π的相移。实验中利用AWG生成随机序列,然后信号再通过电压放大器来驱动PM,从而在两个正交矢量之间生成随机0~2π相位差。EPC可以将特定的输入SOP转换为任意输出SOP,也就是能够任意的改变两个正交矢量之间的幅度和相位差,因此EPC和PM的组合也可以生成任意SOP。最后,SOP通过图1中的分支1显示在PA中。
总的来说,如果没有PM,则SOP切换的响应速度完全由EPC决定,响应速度大约为10 μs,但加上PM之后,EPC和PM可以协同工作,在EPC切换的每两个不同SOP之间生成许多其他由PM带来的新SOP。因此,SOP切换速度取决于PM的响应速度,约为50 ps。
1.2 偏振控制响应速度的测量方案
由于实验中使用PA的输入带宽只有1 MHz,无法通过PA直观显示超快SOP的切换过程,所以SOP在高速切换时需要用其他方法来测量,即把图1中PM的输出连接到分支2。实验中,通过控制EPC的输入电压或PM的调制电压可以实现两个特定SOP之间的切换。在PM之后使用起偏器来区分两个SOP,因为不同的SOP在通过起偏器后得到的光功率不一样。PD用于将光信号转换为电信号,然后发送到实时示波器中。FPGA生成矩形波以确保SOP在测量EPC的响应速度时保持在两个特定SOP之间切换。同样,AWG产生矩形波,确保SOP在测量PM响应速度时保持在两个特定SOP之间切换。
2 实验验证及结果分析
2.1 超快偏振控制的庞加莱球轨迹
首先,测量PM快轴和慢轴之间不同的调制效率,相应的光谱如图2所示。在PM上调制10 GHz的正弦信号,然后通过调整手控PC,让PM仅在快轴或慢轴上传播光。根据图中一阶边带的相对功率,慢轴的调制效率明显高于快轴。

图2 PM慢轴和快轴调制信号的光谱
为了研究由EPC引起的每两个SOP之间SOP的变化过程,通过FPGA设置了加到EPC的两个特定电压组合,这两个电压组合对应了两个特定SOP。图3(a)所示为仅使用EPC时,这两个SOP之间的动态轨迹。可以看到,SOP直接从一个点切换到另一个点。当同时使用EPC和PM时,如图3(b)所示,SOP不是直接从一个点切换到另一个点,而是呈螺旋形轨迹。一旦确定了加在EPC上的电压,加在PM上的快速变化电压将导致SOP在庞加莱球上形成一个圆。需要解释的一点是,图3(b)中是两个圆圈而不是两个点,由于在开始和结束捕获数据时SOP一直在高速变化,因此在开始和结束时肯定会留下一个圆的轨迹。本实验中,在PM上需要加20 V电压才能在两个正交矢量之间引入相对2π的偏移,从而可以在庞加莱球上形成一个完整的圆。由于本实验中加在PM上的信号变化速率比加在EPC上的信号快100倍,因此它将产生100个新的SOP形成图中的螺旋形轨迹。
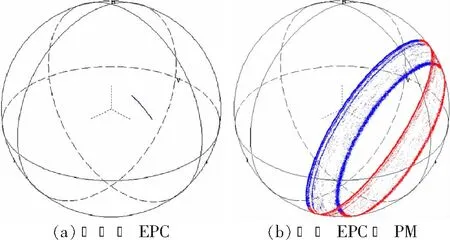
图3 SOP变化轨迹比较
2.2 超快扰偏的测量结果
基于上述现象,如果将完全随机的信号分别施加在EPC和PM上,则可以实现超快扰偏。图4(a)和(b)显示了两种情况下3 s内偏振遍历结果的比较,其中,图4(a)为仅使用EPC,而图4(b)使用的是本文所提方案。FPGA输出随机序列的变化率设为3.3 kHz,AWG输出随机序列的变化率设为330 kHz。在这两种情况下,SOP都可以遍历整个庞加莱球,但在PM工作的情况下,遍历速度快了100倍,因此在同一时间段内图4(b)可以观察到更多的SOP,所以扰偏速度也更快。目前最快的商用EPC来自EOSPACE公司,其响应速度约为10 ns[3]。当将20 GHz随机信号加到PM上时,本文所提方案的扰偏速度比利用最快商用EPC所实现的扰偏速度快数百倍。
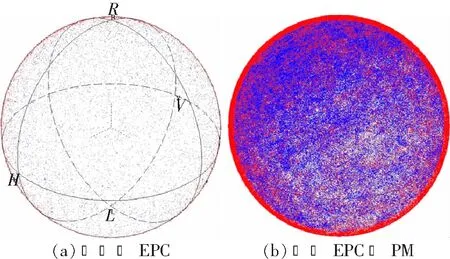
图4 扰偏速度比较
2.3 响应速度的测量结果
测量响应速度时,PM的输出连接到图1中的分支2。EPC的响应速度测量结果如图5所示。

图5 EPC的响应速度测量结果
选定两种不同的电压在EPC上不停地切换,此时EPC的输出SOP从一个SOP切换到另一个SOP的时间是2 μs,反向切换是10 μs。
图6(a)和(b)所示为在PM上调制1和5 GHz矩形波信号时输出SOP的变化。80 GSa/s的实时示波器用于测量分支2中起偏器之后的光功率变化。所以SOP切换的频率分别为2和10 GHz(上升沿和下降沿),证明SOP确实是在以这么高的频率不断切换。为了精确测量响应速度,实验中在PM上调制了100 kHz矩形波信号,此时SOP切换的响应速度即是功率变化的上升沿时间,如图6(c)和(d)所示。实验结果由80 GSa/s实时示波器采样得到,其中上升沿占据4个间隔,相当于50 ps。此结果相较于本实验中所使用的EPC(来自Lightwave2020公司,响应速度约为2~10 μs)快了4万到20万倍,相较于目前最快的商用EPC(来自EOSPACE公司,响应速度约为10 ns)也快了200倍。实际上,该方案SOP切换的响应速度完全取决于PM的响应速度,因此响应速度更快的PM可以实现更快的偏振控制。
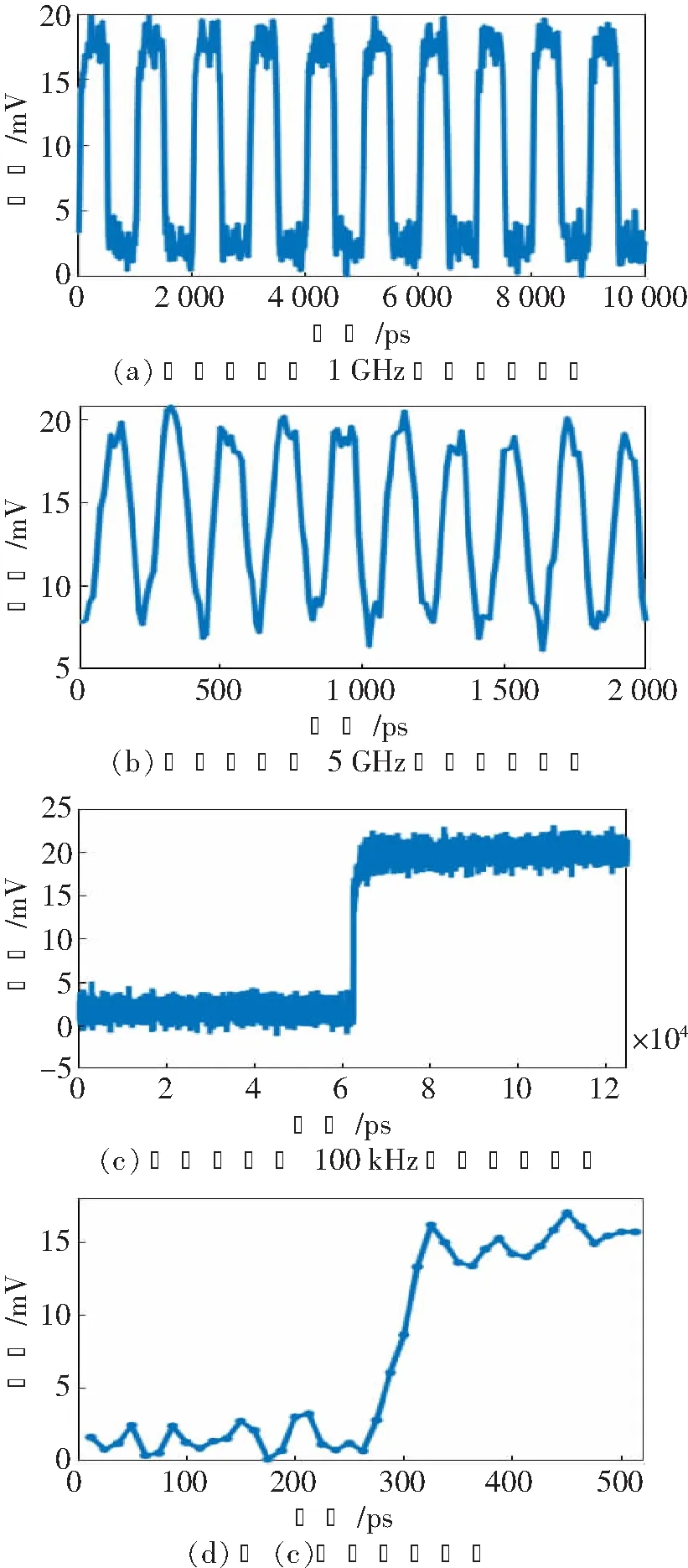
图6 超快偏振控制的响应速度测量结果
除了快速扰偏的应用之外,该技术还适用于其他需要超快偏振控制的应用,例如快速稳偏。对于此类应用,主要任务是尽快找到目标SOP。传统方法的迭代时间受到EPC响应速度的限制,然而使用本文所提方法,目标SOP搜索过程可以使用如下步骤:在庞加莱球上找到随机的SOP,如果不是目标SOP,则通过相位调制在庞加莱球上的一个圆中快速地搜索下一个SOP。因此,得益于高速相位调制,迭代时间可以大大缩短。目前基于所提方案的快速稳偏正在研究中。
3 结束语
本文实验证明了基于低速PC和高速PM组合的超快偏振控制方案。该方案响应速度可达到50 ps,相当于所用PM的响应速度,这比该实验中使用的商用EPC快了4万到20万倍,比目前最快的商用EPC也要快约200倍。由于EPC和PM都可以用任意的电压序列进行调制,所以SOP轨迹可以通过仔细设计所施加的电压序列来定制。而且,我们认为这种超快偏振控制方案将大大有利于扰偏和稳偏技术以及相关的研究。
