基于双目视觉定位的智能葡萄采摘机设计
2024-02-03刘鸿宇
刘鸿宇
(中南大学机电工程学院, 湖南长沙 410012)
0 引言
葡萄在国内种植品种约800 种, 种植面积约60 公顷,采摘劳动力需求大。我国人口老龄化和农村劳动力流失日益严重,迫切需要葡萄采摘自动化。 乡村振兴战略、美丽乡村建设不断实施,人们不断深入探索采摘自动化。当前学者对葡萄采摘自动化研究如下, 日本冈山大学Monta 等[1]针对棚架种植设计了基于激光扫描识别的5自由度葡萄采摘机器人;李慧鹏等[2-3]针对葡萄采摘机自然环境下采摘点定位困难问题,对葡萄、葡萄果梗识别和采摘点定位问题进行了研究;杨皓天等[4]针对机械臂藤蔓避障问题, 进一步优化完善了藤蔓干涉情况的数据计算与分析能力;单海勇等[5-6]以葡萄采摘机构为研究对象,向读者展示了各自的葡萄采摘实现机构。 当前学者针对葡萄、葡萄果梗识别的研究较多、且大多理论已较成熟,但采摘机构的研究多为针对大型葡萄种植基地的大型采摘机,针对中小型葡萄种植户的小型自动化葡萄采摘机研究较少。针对以上研究现状,本文设计了一款适用于中小型葡萄种植户的基于双目视觉定位的智能葡萄采摘机, 实现了葡萄采摘、封装和运输一体化操作,提高了采摘效率、降低了劳动成本。
1 智能葡萄采摘机整体设计
本文基于现代智能识别技术和计算机远程操作模式,设计了一款基于双目视觉定位的智能葡萄采摘机(下文简称“智能葡萄采摘机”)。智能葡萄采摘机主要包括葡萄的采摘系统、封装系统、分装系统、行进系统、掉落收集系统和视觉定位系统6 部分。 基于MBD (Model Based Design)技术,应用Solidworks 三维建模软件设计的智能葡萄采摘机如图1 所示。

图1 葡萄采摘机整体结构图
该智能葡萄采摘机工作原理如下:首先,在双目视觉系统2 确定采摘葡萄位置后, 主控系统控制行进系统16、左运输臂4 和右运输臂7 的动力系统运动,实现采摘姿态调整;其次,塑料袋供给装置17 将空塑料袋6 安装在袋装装置5,并沿着左运输臂4 运动到采摘葡萄下方,同时展开空塑料袋6 做收集准备;再次,塑料袋装满葡萄后,夹持装置12 将装葡萄的塑料袋从袋装装置5 转移到右运输臂7,并沿着右运输臂7 运动到采摘机的主体仓1内,通过主体仓内壁上的封口装置13 利用铝钉将装有葡萄的塑料袋封口;最后,收集装置14 运动到夹持装置12正下方,夹持装置12 张开后装葡萄的塑料袋掉落到收集装置14 中, 并将葡萄存放到存放装置15 实现葡萄的存放操作。
2 智能葡萄采摘机结构设计
2.1 采摘系统设计
采摘系统包括采摘机械臂、左运输臂、袋装装置和塑料袋供给装置4 部分。 采摘机械臂采用带剪子的6 自由度机械臂, 末端执行器上的剪子用于实现葡萄与藤蔓的分离。 左运输臂是设有橡胶轨道的环状支撑臂,安装有2个袋装装置可以沿着橡胶轨道运动。 左侧电机转动可驱动左运输臂实现倾斜角度调整。
袋装装置结构如图2 所示, 空塑料袋安装在袋装装置后,左、右固定夹持器闭合实现塑料袋的固定操作。 伸缩吸盘吸附住靠运动导轨侧的塑料袋外侧后, 伸缩吸盘与左、右固定夹持器同时向着运动导轨中间方向运动,实现塑料袋的展开操作。
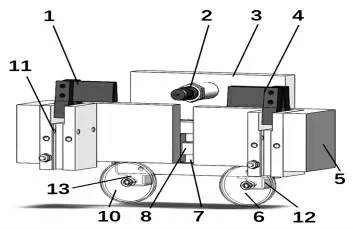
图2 袋装装置结构示意图
2.2 封装系统设计
封装系统包括右运输臂、 夹持装置和封口装置3 部分。右运输臂侧面设有橡胶轨道,臂上安装有1 个夹持装置可沿橡胶轨道运动。 右侧电机转动可驱动右运输臂实现倾斜角度调整。
夹持装置用于实现葡萄从袋装装置到右运输臂的转移,其结构如图3 所示,是一个可在X 方向、Z 方向运动的2 自由度机械臂。

图3 夹持装置结构示意图
2.3 分装系统设计
分装系统包括葡萄的收集装置、存放装置2 部分,其结构如图4 所示。 前、后横向丝杆转动使葡萄接收筐沿X方向运动实现横向位置调节, 纵向丝杆转动使葡萄接收筐沿Y 方向运动实现纵向位置调整。 前/后横向丝杆、纵向丝杆驱动葡萄接收筐运动到右运输臂上的夹持装置下方,夹持机构展开将葡萄放置到葡萄接收筐中;前/后横向丝杆、 纵向丝杆再驱动葡萄接收筐运动到对应葡萄存放格上方,打开底板将葡萄放到存放格实现分装操作。
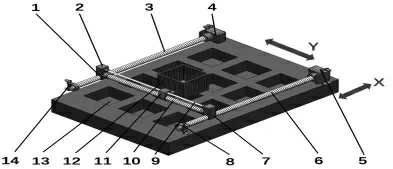
图4 葡萄分装系统结构图
2.4 行进系统设计
行进系统采用履带式行进机构, 在主动轴两端都设有结构一样的行星差速结构。主动电机使主动轴转动,带动左、右主动轴圆锥齿作等速同向转动,进而带动左、右动力输出轴作等速同向转动实现采摘机直线运动; 差速电机转动使左、 右差速输出轴作等速反向转动, 进而使左、右差速行星轮作等速反向转动,导致左、右动力输出轴出现转速差,实现转弯运动。
3 智能葡萄采摘机仿真分析
3.1 智能葡萄采摘机系统仿真
智能葡萄采摘机系统仿真主要验证采摘机的葡萄采摘、封装、运输功能,智能葡萄采摘机的采摘流程如图5所示。

图5 智能葡萄采摘机的采摘流程图
对采摘、封装和运输一体化采摘过程进行仿真。 在一次采摘过程中,极限采摘工况(采摘机械臂处于最大打开状态,完成葡萄采摘、装袋并运至左后方的存放格中)下的目标葡萄串的运动轨迹如图6 所示。

图6 目标葡萄串的运动轨迹示意图
3.2 主要零部件分析校核
智能葡萄采摘机的驱动机构采用市面上的成熟产品进行选型设计,具备较大的安全设计余量,因此不再进行力学分析校核, 主要对自制零部件葡萄接收筐进行校核分析。
葡萄接收筐作为葡萄分装过程的主要承载部件,按照满载葡萄状态(约1.5kg)开展力学分析校核,并根据分析结果对葡萄接收筐挡板进行优化设计, 最后对优化后的结构进行力学分析校核。 结果表明:最大应力为48.3MPa,远小于对应材料304 不锈钢的屈服强度(205MPa);最大变形仅为0.57mm,满足刚强度设计需求。
4 结论
本文设计了一种基于双目视觉定位的智能葡萄采摘机, 详细介绍了该系统的基本原理与各个功能分系统的结构组成,系统仿真了采摘机的葡萄采摘、封装、运输功能, 输出目标葡萄串的运动轨迹, 并基于ANSYS Workbench 软件对主要受力部件开展分析校核,对结构方案设计及材料选型进行验证分析。该系统可自动化实现采摘、封装和运输的一体化操作,具有较强的工程实施价值,相对于传统人工采摘的方式,能有效提高采摘效率、降低采摘人力成本, 对提高葡萄采摘自动化水平有十分重要的意义,同时可以为其他类似自动化产品设计提供参考。
