到达时间差与扫描时间差定位精度分析
2024-02-02姚山峰杨宇翔欧阳鑫信
邓 兵,姚山峰,杨宇翔,贺 青,欧阳鑫信
(信号盲处理国家级重点实验室, 成都 610041)
0 引言
对于周期性旋转扫描雷达信号辐射源的定位属于无源定位的研究范畴之一,长期以来受到国内外众多学者的关注[1-7]。常用的雷达信号无源定位方法主要包括测向交会定位(angle of arrival,AOA)与到达时间差(time difference of arrival,TDOA)定位2种技术体制[8-13]。其中测向交会定位利用2个以上接收站对雷达信号的来波方向进行测量,然后通过不同的测向线交会得到目标的位置信息。而到达时间差则利用2组以上雷达信号到达不同的接收站路径差异所带来的时间差值实现目标辐射源定位。由于以上方法隐蔽性强、实用性好、系统复杂度低等优势,在实际当中受到广泛应用。
然而由于测向交会定位精度受限于目标来波方位估计精度,而高精度测向系统往往复杂度较高,对于天线尺寸、构型等有较高要求;时差定位技术需要3站或者3站以上,要求信号能够多站同时接收,且一般信号时差估计精度受限于接收站所获取雷达信号的信噪比、带宽等因素,对于站间同步精度要求高[14]。这些因素制约了测向交会与时差定位2种体制在部分高精度定位需求场合下的使用。
针对静止或者慢速运动的周期性旋转扫描雷达辐射源,提出一种基于到达时间差与扫描时间差联合的无源定位方法。该方法仅需要2个接收站,通过测量2站之间所接收雷达信号的到达时间差(TDOA)和雷达辐射源信号主瓣扫描到2个接收站之间的时间差,即扫描时间差(time difference of scan,TDOS),其中到达时间差(TDOA)确定了一条以2个接收站为焦点的双曲面,与地球球面相交后,形成了一条到达时间差定位双曲线;扫描时间差(TDOS)确定了一个到2个接收站夹角为定值的曲面,该曲面以两接收站连线为弦,以等角度线为弧线组成弓形,绕两接收站连线对称旋转形成,同样与地球球面相交后,形成了一条定位扫描时差等角度线,雷达辐射源位于到达时间差定位双曲线和扫描时间差等角度线交点上。
雷达信号到达时间差估计可以通过脉冲描述字(pulse description word,PDW)参数提取,精度较高;扫描时间差可以通过检测两站雷达信号幅度随时间变化曲线的峰值位置估计雷达主瓣信号经过两接收站的扫描用时,进而获得扫描时间差信息,该信息简单易获得、精度很高[1,10]。因此,通过到达时间差与扫描时间差联合定位方法不仅定位精度高,而且可以减少传统时差系统对于接收站的数量需求,相对3站接收,双站共视接收概率更好保证,提高对于周期性旋转扫描雷达辐射源信号的定位成功率。
文中首先给出到达时间差与扫描时间差联合定位基本原理以及定位方程,并给出了闭式求解算法,在此基础上,推导了该体制定位克拉美罗下限(cramer-rao low bound,CRLB),分析了对目标定位精度有影响的不同因素,最后通过计算机仿真总结出了提高到达时间差和扫描时间差角度信息参数测量精度、增大站间基线长度、减小平台位置误差来提升目标定位精度的基本结论,并通过在到达时间差为20 ns、扫描时间差为10 μs(等角误差约为0.001°)典型值情况下,距离接收站连线中心处450 km处,目标定位精度可以达到50 m,证明了该方法具有很好的实际应用价值。
1 到达时间差与扫描时间差定位原理
1.1 扫描时间差定位原理
周期性扫描雷达通过信号回波提取目标位置及方位信息,其扫描周期 一般固定。通过提取雷达旋转扫描时天线主瓣经过两接收站的扫描用时,可以获取得到雷达辐射源与2个接收站形成的夹角信息,其提取基本原理如图1所示。

图1 雷达目标与两接收站夹角信息示意图
根据几何原理,到达2个定点夹角为固定值的点迹不唯一,故利用该夹角信息与地球表面相交,形成一条以2个接收站为端点的圆弧扫描时间差等角线,则目标位于该等角线上。
而对于该夹角θ,其取值区间为[0°,180°]。当θ=0°时,则扫描时间差等角线为以2个接收站为连线的延长线上;当0°<θ<90°时,扫描时间差等角线为远离2个接收站的近似“8”字圆弧;当θ=90°时,则扫描时间差等角线为以2个接收站为直径的圆;当90°<θ<180°时,扫描时间差等角线为靠近2个接收站的近似椭圆圆弧;当θ=180°时,则等角线为以2个接收站为连线的线段上。如图2所示。
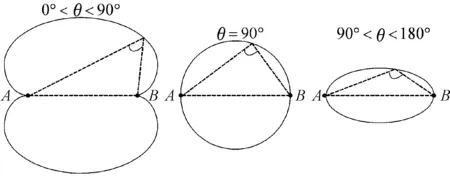
图2 等角线不同情况示意图
同时通过提取雷达目标信号到达2个接收站的时差信息,则同样可以获得一条到达时间差曲线,联合获取的扫描时间差等角线可以实现目标位置求解。其基本原理如图3所示。
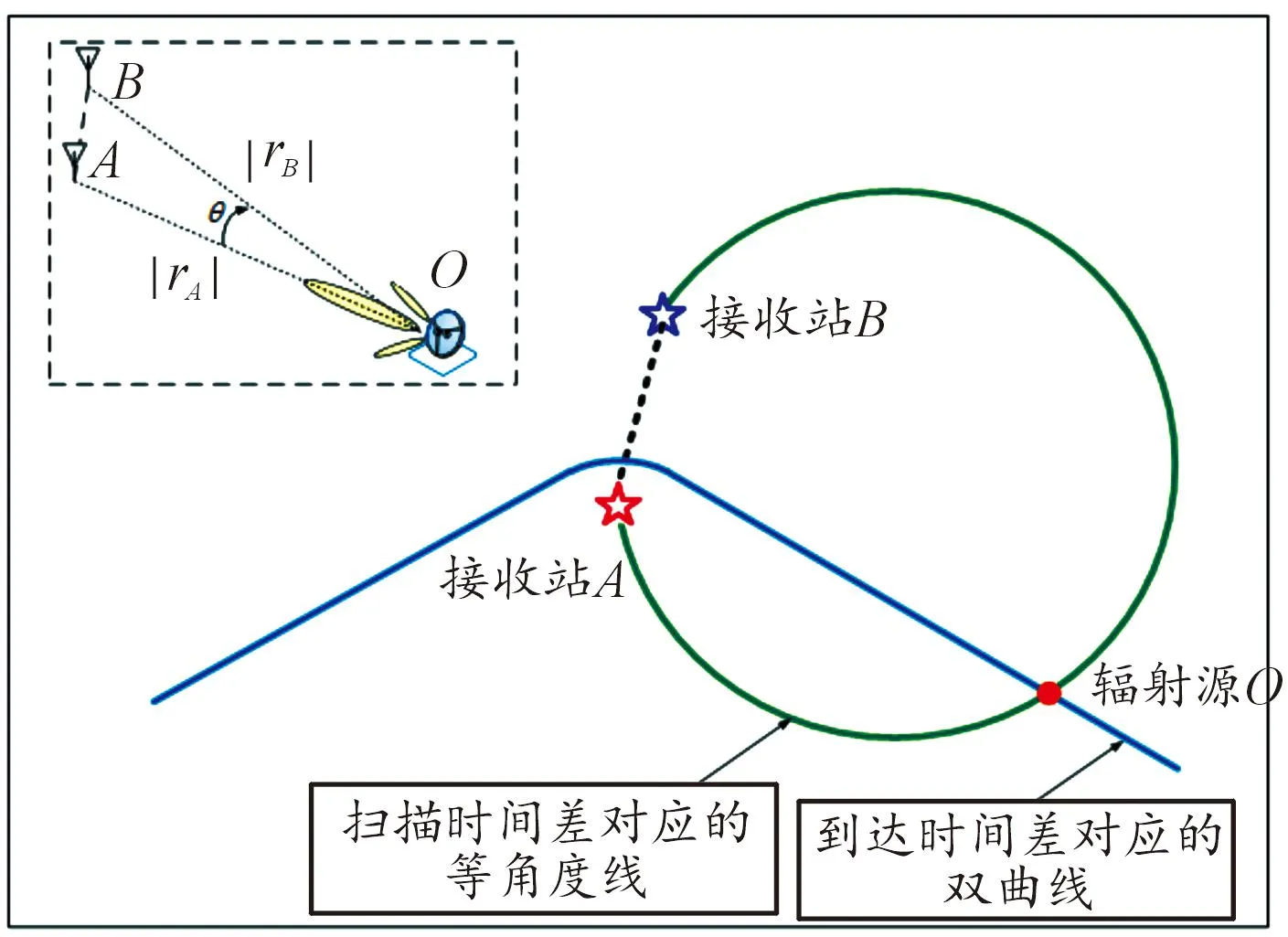
图3 到达时间差与扫描时间差定位原理示意图
1.2 定位信息提取方法
1.2.1到达时间差提取方法
对于雷达信号的时差提取分为2种情况:一是当两站接收信号均为高信噪比的脉冲信号时,提取脉冲的上升沿时间作为脉冲到达时间,然后将两站接收信号的脉冲到达时间直接相减得到时差;二是当2个接收站中有一站的接收信号为低信噪比的脉冲信号或两站接收信号为连续波雷达信号时,通过采样数据二维相关法实现两站接收信号的到达时间差估计[15-18]。利用以上方法,一般到达时间差测量精度可以到10~50 ns级左右。
1.2.2扫描时间差提取方法
扫描时间差提取方法主要是:对接收信号的幅度包络进行曲线拟合得到信号幅度随时间的变化曲线,搜索信号幅度随时间变化曲线的峰值位置,确定雷达主瓣照射到2个接收站的时刻,由此估计雷达旋转扫描经过两接收站的扫描用时,根据扫描用时以及雷达的旋转方向、旋转扫描速率计算雷达旋转扫描经过两接收站的扫描时间差。
根据该原理可以得到该扫描时间差为
tdos=t2-t1
(1)
式(1)中:t1、t2分别表示雷达信号主瓣到达接收站1、接收站2的时间。
根据雷达扫描周期,可以得到该雷达与2个接收站之间的夹角信息为
θ=|t2-t1|/T*2π
(2)
式(2)中:T为雷达信号扫描周期;θ表示雷达信号与接收站1、2的夹角。当知道雷达旋转方向或者信号到达两站先后时,可以去掉|·|符号。
由于雷达扫描周期一般为秒级,而表示雷达信号主瓣到达接收站1、2的时间差(t2-t1)提取精度比较容易可以达到微秒级。
假设雷达扫描周期为3 s,而扫描时间差提取精度为5 μs,则提取的等角信息测量精度约为6×10-4度,可见,该方法能够获取很高的等角线测量精度,一般可以达到0.01°~0.000 1°左右。
1.3 定位方程
假设辐射源位置坐标为u=[x,y,z]T,接收站的位置坐标为si=[xi,yi,zi]T,i=1,2。
1.3.1时差定位方程
不失一般性,以接收站1为参考,则根据时差定位原理,可以得到时差方程:

(3)
1.3.2角度定位方程
根据几何关系,目标信号与接收站1、2之间的夹角为:

(4)
联合式(3)和式(4)即得到了基于到达时间差与扫描时间差等角信息联合的目标定位方程:

(5)
可以通过上述方程,利用三角余弦定理和几何关系,推导得到:

(6)
该解析解复杂度低,可以实时计算出目标位置。
2 定位误差分析
根据统计信号估计理论,无偏估计量的方差存在理论下界,常用克拉美罗下限(cramer-rao low bound,CRLB)表示[15-20]。并将算法逼近这一下限的程度作为评价各种算法好坏的一个标准。


(7)
式(7)中:J为Fisher信息矩阵,其表达式为

(8)
(9)
令m=[tdoa,θ]T表示到达时间差与扫描时间差等角测量信息。下面根据以上理论来分析到达时间差与扫描时间差等角信息联合的目标定位克拉美罗界。
2.1 定位误差与测量误差的关系
根据式(5),到达时间差与扫描时间差等角信息测量方程两边对辐射源坐标位置矢量u微分后可以得出:

(10)
(11)

Qm=diag(Qt,Qθ),表示到达时间差与扫描时间差等角信息测量误差协方差矩阵。
则目标定位的均方根(RMSE)误差为
RMSE=tr(CRLB(u))
(12)
式(12)中:tr(·)表示取矩阵迹。
2.2 定位误差与平台误差的关系
由于定位过程中,到达时间差、扫描时间差等角信息测量值与平台的位置相关,若接收平台自身位置在计算时存在误差,则该误差将被引入到目标位置估计过程中,进而使得辐射源位置估计精度受到影响。
进一步推导存在平台站址误差时的定位下限。根据相关文献[19-20],此时的CRLB表达式为:
CRLB(u)=J-1,J=X-YZ-1YT
(13)
(14)


(15)
Qs为对应的平台位置误差协方差矩阵。
3 仿真分析
为进一步说明到达时间差与扫描时间差等角信息联合定位体制中各影响因素对于目标辐射源定位精度的影响,分别从测到达时间差误差大小、等角信息测量大小、平台位置误差大小等方面,进行辐射源定位误差仿真分析,以便直观说明这些因素对于定位误差的影响。
为避免特殊化,假设2个观测平台初始位置分别位于(100° E,40° N,0 m)、(101° E,40° N,0 m)处(表1)。
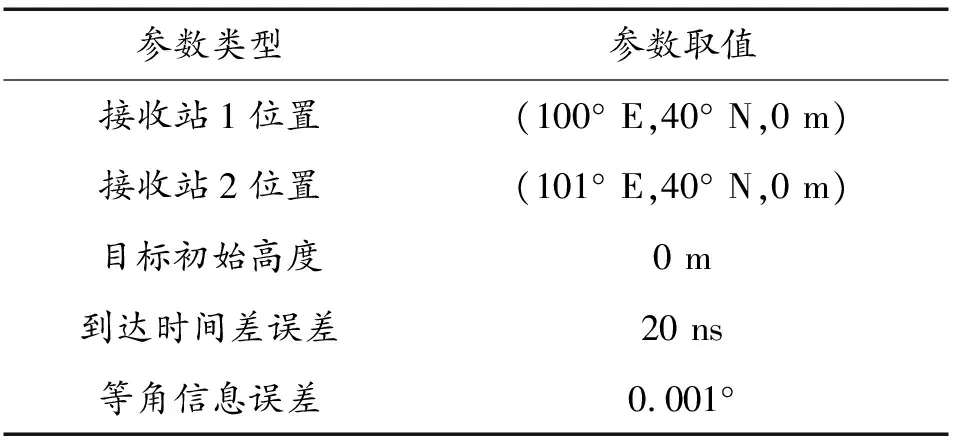
表1 初始仿真参数设置
按照以上参数,仿真得到目标定位GDOP分布,结果如图4所示。

图4 时差等角线定位误差GDOP分布图
从图4可以看出:
1) 目标定位精度关于2个接收站连线呈上下、左右对称分布;
2) 目标位置越靠近2个接收站连线垂线方向定位精度越高,然后随着目标位置的远离定位精度随之下降;
3) 目标位于2个接收站连线延长线上时,定位精度最差,离观测平台越远,误差越大,近乎不可观测。
4) 在到达时间差为20 ns、扫描时间差为10 μs(等角误差约为0.001°)典型值情况下,距离接收站连线中心处450 km处,目标定位精度可以达到50 m,远远超过目前的时差定位系统。
在对于误差分布基本情况有所直观印象下,以定位精度200 m为标准,通过观察满足该精度的目标分布方位,进一步分析不同误差影响因素对辐射源定位精度的影响。
3.1 到达时间差精度影响
首先分析到达时间差测量精度的影响。假设到达时间差测量精度分别为10、20、50 ns。等角信息误差为0.000 1°,在以上参数假设条件下,200 m定位精度GDOP分布结果如图5所示。
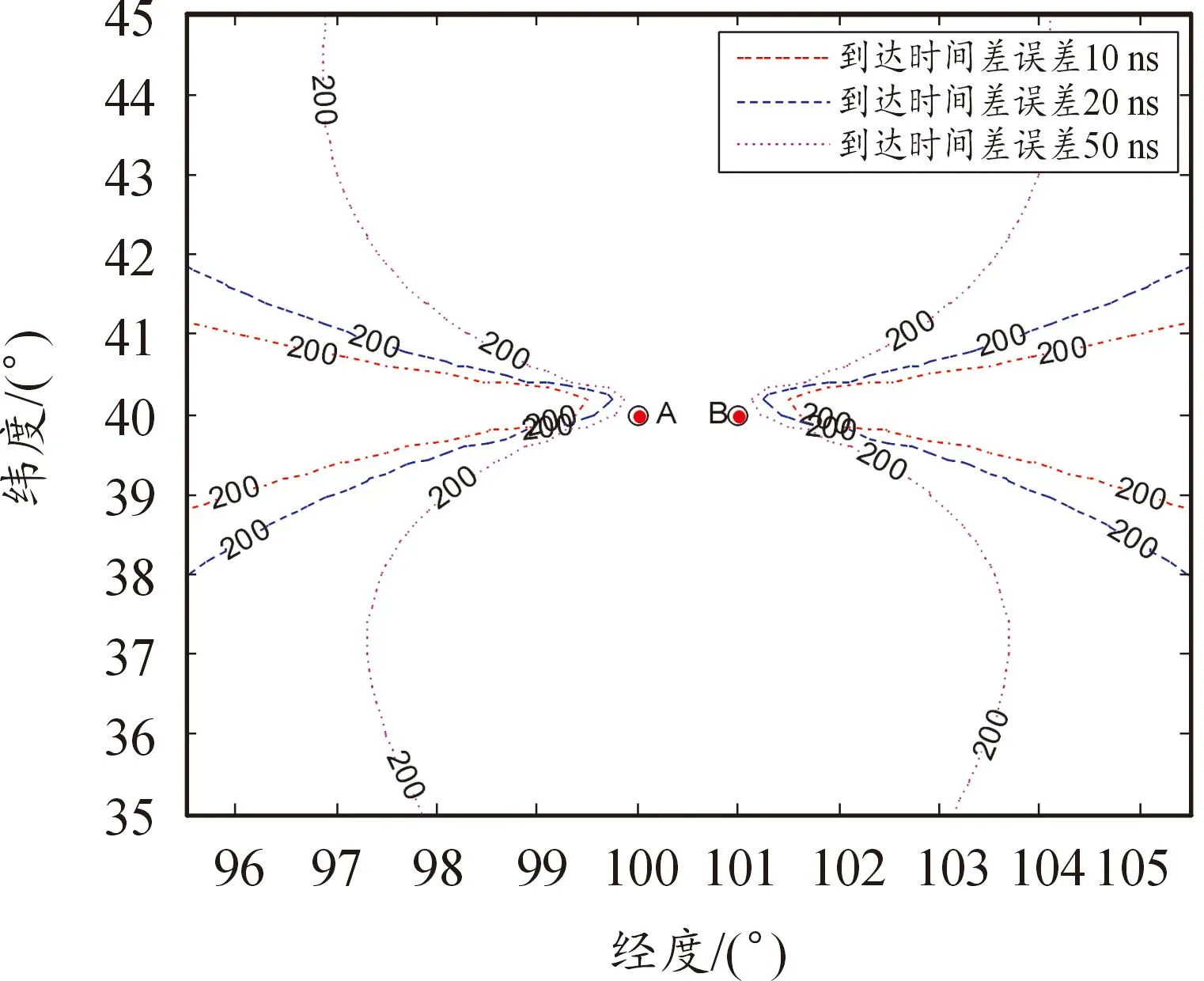
图5 不同时差测量误差条件下GDOP分布图
从该仿真条件下的GDOP结果图可以看出:时差测量精度越高,相同位置处的目标定位精度越高。
3.2 扫描时间差等角信息精度影响
分析扫描时间差等角测量精度的影响。假设到达时间差测量精度为20 ns。等角信息测量误差分别为0.000 1°、0.001°、0.005°。在以上参数假设条件下,200 m定位精度GDOP分布如图6所示。
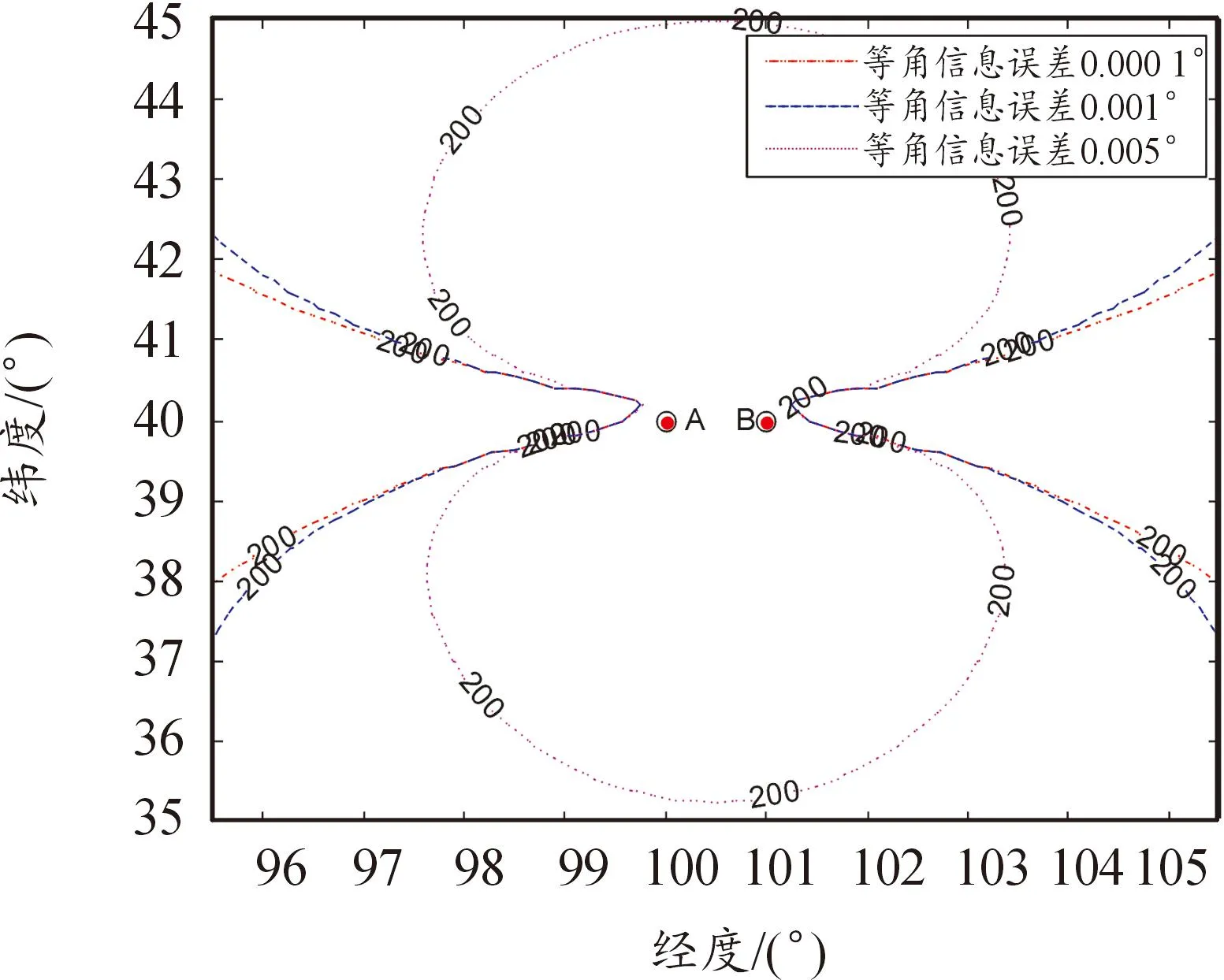
图6 不同等角测量误差条件下GDOP分布图
从该仿真条件下的GDOP结果图可以看出:等角信息测量精度越高,相同位置处的目标定位精度越高。
3.3 基线长度影响
分析不同平台基线长度对定位精度的影响。到达时间差测量精度为50 ns,等角信息误差为0.000 1°,平台高度0 km。假设平台基线长度分别为10、50、100 km。在以上参数假设条件下,目标GDOP分布如图7所示。
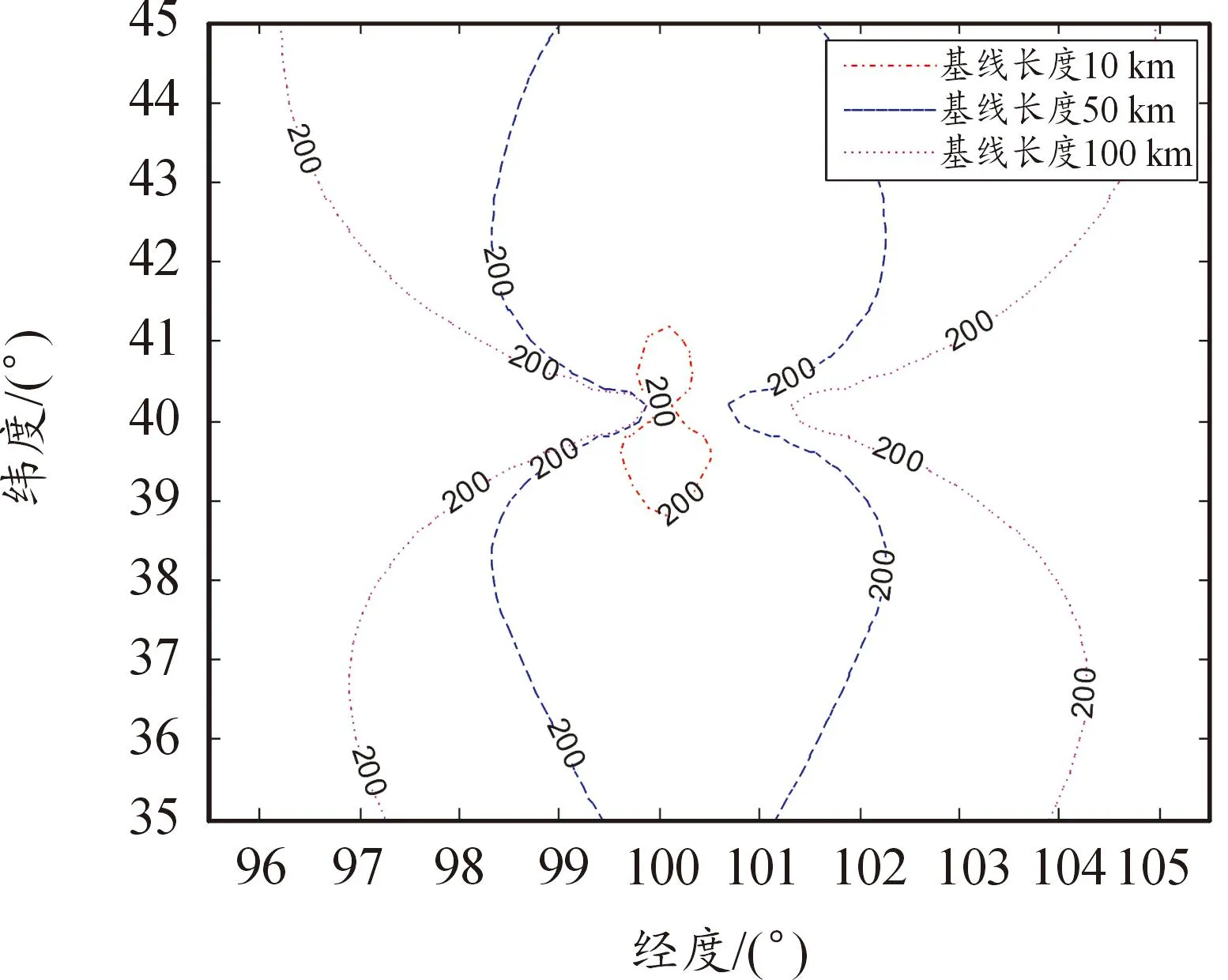
图7 不同基线长度下GDOP分布图
从该仿真条件下的GDOP结果图可以看出:相同测量条件下,接收站平台之间基线越长,相同位置处的目标定位精度越高。
3.4 平台高度影响
分析不同接收站平台高度对定位精度的影响。到达时间差测量精度为50 ns,等角信息误差为0.001°,假设平台高度分别为0、5、10 km。在以上参数假设条件下,目标GDOP分布如图8所示。
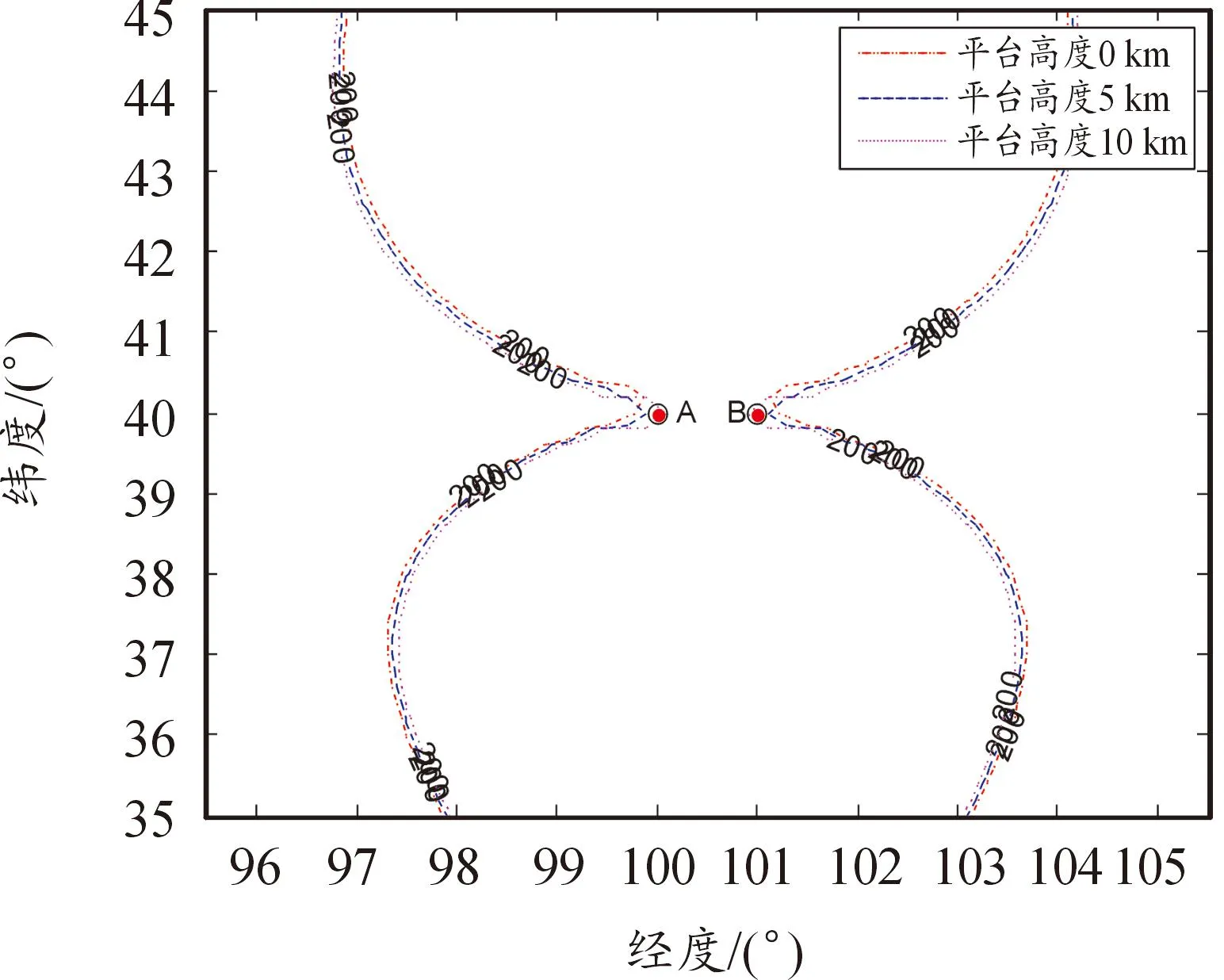
图8 不同平台高度条件下GDOP分布图
从该仿真条件下的GDOP结果图可以看出:相同测量条件下,接收站平台高度越高,相同位置处的目标定位精度越高,但是差距不大,在到达时间差、扫描时间差等角信息测量精度高时可以忽略平台高度的影响。
3.5 平台位置误差影响
分析不同接收站平台位置误差对定位精度的影响。到达时间差测量精度为20 ns,等角信息误差为0.001°,假设平台位置误差分别为1、5、10 m。在以上参数假设条件下,目标GDOP分布如图9所示。
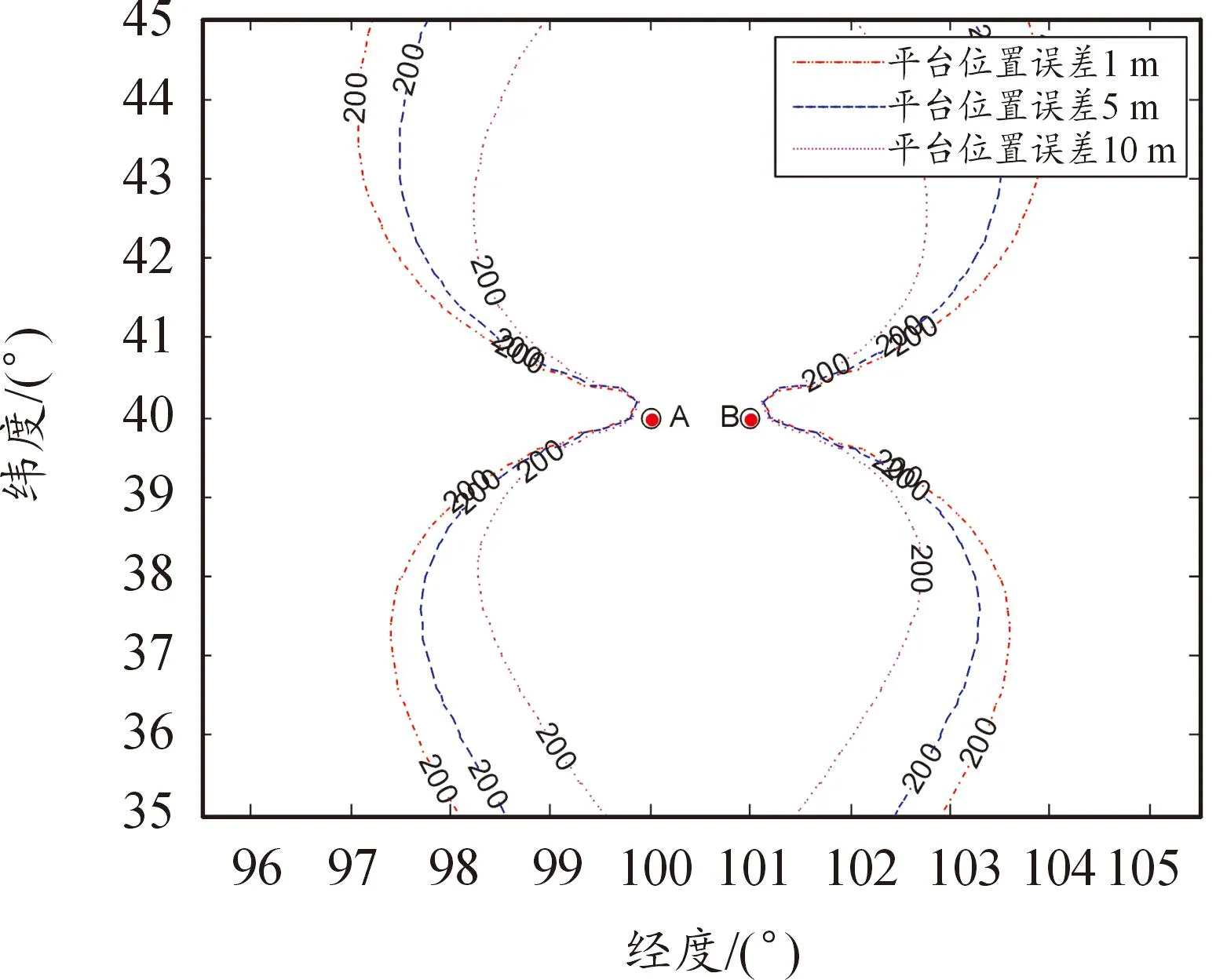
图9 不同平台位置误差条件下GDOP分布图
从该仿真条件下的GDOP结果图可以看出:在当前的参数测量条件下,平台位置误差越小,相同位置处的目标定位精度越高。
3.6 仿真结论
根据仿真结果可以看出,基于到达时间差与扫描时间差联合的无源定位当中,通过提高到达时间差和扫描时间差角度信息参数测量精度、增大站间基线长度、减小平台位置误差等都能够明显提升目标定位精度。
进一步分析可以看出,提高到达时间差和扫描时间差角度信息参数测量精度均是从测量信息入手,越精确的测量参数表明对于目标的信号特征参数估计地越准确;减小平台位置误差等主要是降低定位解算中直接相关的误差项,进而降低目标定位误差。
4 结论
基于双站到达时间差和扫描时间差信息的扫描型辐射源定位系统,相对三站时差定位系统,减少了观测站数目需求,便于灵活布站选址,是一种简单有效的无源定位手段。
下一步,将进一步利用以上定位模型、误差定位克拉美罗界,指导实际系统的信号接收及参数提取、高精度定位算法以及运动接收平台下的目标定位等展开研究工作。