Voronoi分布式虚拟结构制导炸弹群控制策略设计
2024-02-01盛安冬路绳方
陈 烨,盛安冬,梁 苑,路绳方
(1.南京工程学院 人工智能产业技术研究院, 南京 211167; 2.南京理工大学 自动化学院, 南京 210094)
0 引言
近年来,制导炸弹以其成本低廉、杀伤可控、作战灵活、打击高效等诸多优势,受到众多国家军事装备部门的高度重视,成为各国空军重要作战力量[1-2]。为提高制导炸弹的控制精度,考虑工程研制的实际需求,近几年来,国内外学者针对制导炸弹的飞行控制方法及精度进行了深入的研究。文献[3]针对海洋环境中的海面反射/散射、海情等因素对激光制导炸弹的影响进行了研究。文献[4]基于终端滑模变结构控制理论及有限时间收敛性理论,提出一种考虑落角约束的制导炸弹有限时间控制制导律。文献[5]基于序贯截尾检验方法,采用Monte-Carlo方法,通过分析不同的CEP指标,对激光制导炸弹的投放精度进行了评估。文献[6]针对常规航空炸弹制导化改进需求,提出了一种由稳定控制回路和弹体构成的闭环系统方案。文献[7]利用Radau伪谱法对制导炸弹最优滑翔弹道进行了研究,给出了此种条件下的最优控制轨迹解析解及一阶必要性条件。文献[8]将极小值原理与自适应进化粒子群算法相结合,提出了一种适用于航空制导炸弹增程弹道的组合优化设计方法。文献[9]针对新型制导炸弹攻击区的求解问题,建立了受约束条件下的制导炸弹动力学模型,并给出了一种基于Gauss伪谱法的求解方法。文献[10]通过简易人工势场模型,对多枚反舰导弹航路规划问题进行研究,并对饱和攻击效果进行验证。
在实际作战时,制导炸弹群各弹体弹着点不同,会极大影响毁伤效果,因此如何控制制导炸弹群使得其在攻击区域目标时获得最佳毁伤效果,成为当前亟须解决的问题。文献[11]采用多智能体编队控制策略对这一问题进行了初步研究,并取得了不错的攻击效果,为此问题接下来的研究奠定了基础。文献[12]指出航空制导炸弹集群作战已成为未来发展重要趋势,其在协同攻击、高效毁伤等方面具有不可替代的优势。
基于以上分析,针对面向区域目标时的制导炸弹群控制策略设计问题是目前制导炸弹领域研究重点问题。并针对现有基于人工势场等方法最终弹着点散布结果是势场中各作用力相互作用的结果,具有一定的不可控性及下落队形散乱等问题,提出了一种Voronoi导引的分布式一致虚拟结构控制方法,不仅可保证弹着点位置满足计算几何意义上的最优覆盖,还可解决制导炸弹群下落过程中的队形控制问题,对制导炸弹个体制导律设计具有一定指导意义和参考价值。
1 制导炸弹群运动模型
为便于设计制导炸弹群的控制策略,需建立简化制导炸弹群运动模型,参照文献[11],水平与垂直方向运动解耦,建立制导炸弹群运动模型如下。
水平方向制导炸弹群状态向量为


(1)
其中
diag(·)n×n表示块对角矩阵,m为制导炸弹个体质量,u为控制输入。
(2)

为便于下文分析,参照文献[10],做出如下假设:
1) 各制导炸弹具备相同物理性质(如质量等)。
2) 所有制导炸弹在同一高度释放。
3) 制导炸弹在飞行过程中,空气阻力系数、空气密度等不变。
4) 制导炸弹群在飞行过程中形成的通信拓扑图始终是强连通的。
2 理论弹着点计算
为使得制导炸弹群中的各炸弹落在目标区域中较为理想的位置,对区域目标完成较好覆盖打击,特运用计算几何中的Voronoi图进行理论弹着点位置计算。
定义1[13]令Q为距离函数为d的空间,P=[pi…pj…pn]为空间Q中非空点集,共n个点。对应于pi的Vi称为关于pi的Voronoi区域,由空间Q中所有到pi的距离不大于到pj(j≠i)的点的集合,满足
Vi={x|x∈Q,d(x,pi)≤d(x,pj), ∀j≠i}
(3)
设区域目标Q制导炸弹群水平初始位置P=[pi…pj…pn],为使制导炸弹群面对区域目标时产生最佳覆盖打击效果,应使目标区域中任一点与制导炸弹群中某一弹体着点距离尽量小,这样从理论上可满足面对区域目标时的较好覆盖打击效果,基于此,定义目标函数

(4)
因此,制导炸弹群面对区域目标时的理论弹着点计算问题可用上式表征。为解决此问题,给出如下引理。
引理1[13]当P中各点位于各自相应Voronoi区域Vi的最小外接圆圆心位置CC(Vi)时,称此时P为最小外接圆圆心Voronoi点集,且此时函数HDC(P)取得最小值。
引理2[13]最小外接圆圆心Voronoi点集会逐渐收敛包含在ADC(Q)的闭包的最大弱不变集中,其中ADC(Q)表示所有最小外接圆圆心Voronoi点集的集合。
为解决式(4)中极值问题,给出定理1如下。
定理1设制导炸弹群中个体i当前位置为pi,则由下式即可给出制导炸弹i水平投影平面内收敛至CC(Vi)的连续运动轨迹。

(5)

为保证制导炸弹群下落中队形可控,并避免其对中心节点的依赖,设计分布式一致虚拟结构法如下。
3 分布式一致虚拟结构法
为保证制导炸弹群下落中队形可控,运用虚拟结构法将制导炸弹群视为整体刚体进行控制,将期望队形质心作为虚拟结构中心,并通过设置各制导炸弹个体相对于虚拟中心位置及角度构造期望队形。
令B={bi,1≤i≤n}表示由n个制导炸弹组成的集群,有向图G为制导炸弹群运动过程中各制导炸弹间通讯连接关系。从bi到bj的有向边(bi,bj)表示制导炸弹j可收到制导炸弹i的信息,称j为i的邻居节点。若有向图G中任意两节点间存在通路,称有向图G为强连通。若有向图G中至少存在一个节点,其到其余所有节点均存在通路,则称有向图G存在一颗生成树,此节点为根节点。相应制导炸弹群虚拟结构示意图如图1所示。其中,CI为惯性坐标系,CF为以虚拟结构中心为原点建立的编队坐标系。虚拟结构中心在坐标系CI中坐标为(xF,yF),偏航角为θF。bi为制导炸弹i当前所处水平投影位置,bi,d为相应期望位置。
令(xi,d,yi,d,θi,d)表示制导炸弹i在CI中的期望位置及偏航角,可得
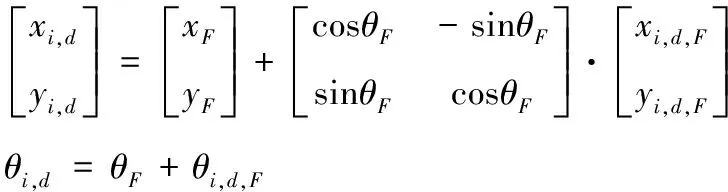
(6)
其中,(xi,d,F,yi,d,F,θi,d,F)表示制导炸弹i在CF中的相对位置和相对偏航角。
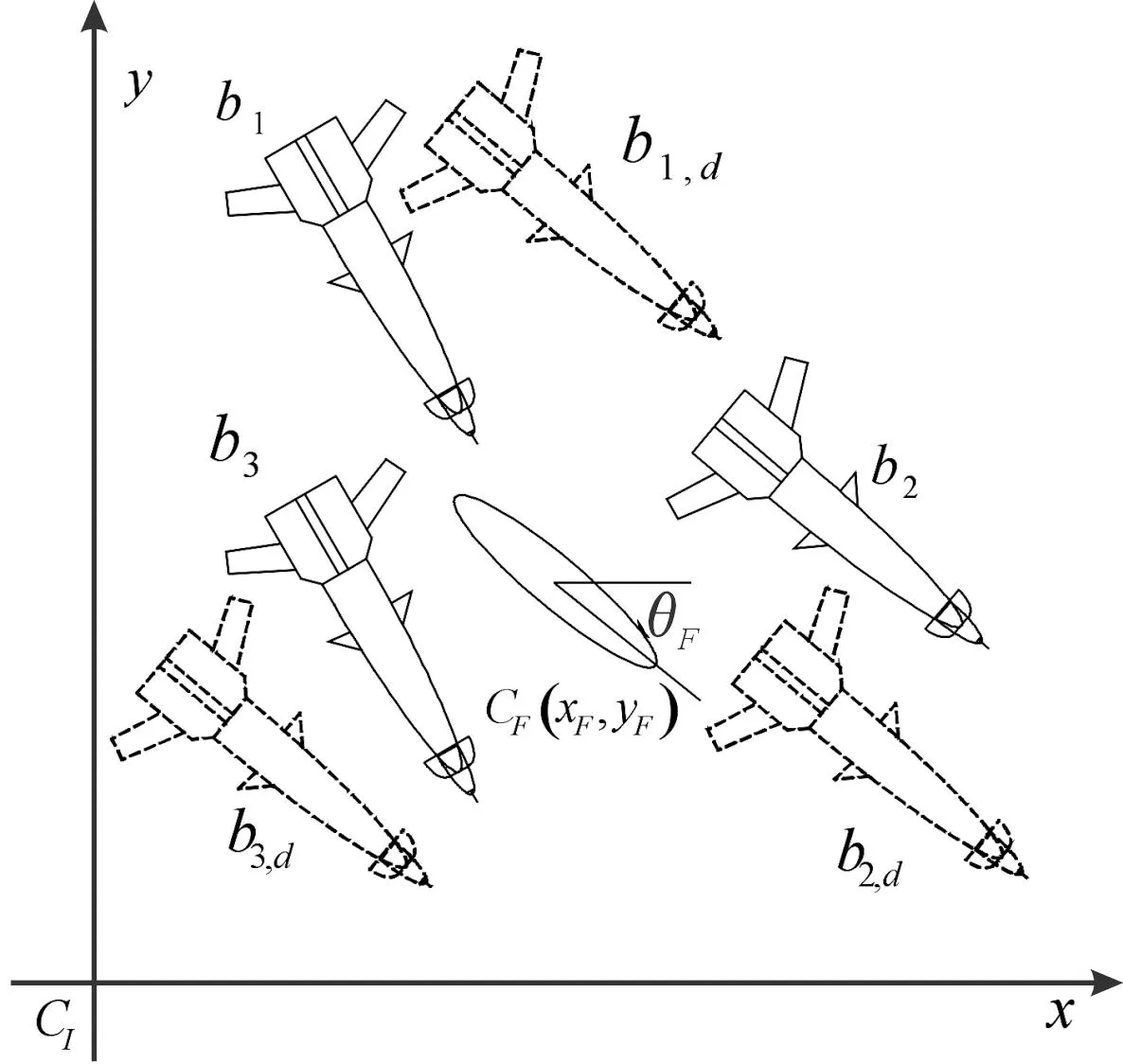
图1 制导炸弹群虚拟结构示意图
为解决经典虚拟结构法中,各个体均需同中心节点进行通信,若中心节点被摧毁或干扰,则整体系统无法继续正常运行的问题,提出一种分布式一致虚拟结构法对制导炸弹群飞行过程进行控制。其中各个体仅需同其邻居节点进行通信,即可完成制导炸弹群整体关于虚拟结构中心信息的一致性。
设制导炸弹i虚拟结构中心信息为Si=[xi,F,yi,F,θi,F],Ts为各节点一致性信息交互采样周期,由如下信息一致算法即可完成各制导炸弹关于虚拟结构中心信息的一致性。

(7)

S(k+1)=(D(k)⊗Im)S(k)+v(k)
(8)

为便于下文进一步分析,给出如下定义说明。

引理3[14]若矩阵Q1、Q2、…、Qn为非周期不可分的,则其乘积Qn…Q1亦为非周期不可分的,满足
(9)


证明由式(8)可得
S(k)=D(k)D(k-1)…D(0)S(0)+

(10)

为设计制导炸弹水平面内运动轨迹,对制导炸弹水平平面运动模型反馈线性化,可得如下简化模型

(11)
由上述模型,制导炸弹群自离开载机后,向目标区域运动,由分布式一致虚拟结构法,可使制导炸弹群下落过程中以期望队形运动,并保证各制导炸弹群到达目标区域时,均可落点于最佳覆盖弹着点位置。
为进一步说明文中所提方法的合理性及实际应用的可行性,将于仿真分析部分对所提方法进行评估。
4 仿真分析
设区域目标由下文图2中不规则多边形表示。制导炸弹群中个体总数为25枚,初值水平面位置为高斯分布,中心点坐标为[-1.5 km,-1.5 km]T,各制导炸弹质量为100 kg,下落过程中空气密度为1.814 kg/m3,垂直方向阻力常数Cd=0.4,制导炸弹运动区域参考阻力系数Ar=1.57 m2。
制导炸弹群向目标区域运动过程中运用文中所提Voronoi分布式一致虚拟结构法对制导炸弹群进行控制。
运用文中所提Voronoi理论弹着点计算方法,可得针对所给目标区域最佳覆盖效果弹着点散布图如下。
图2 制导炸弹群Voronoi弹着点散布图
由图2可以看出,制导炸弹群在所提理论弹着点计算方法下,可获得计算几何意义下的最佳覆盖效果,且附带毁伤较小。
为进一步说明本文中所提出分布式一致虚拟结构法中各制导炸弹个体可在一段时间后,关于虚拟结构中心信息状态达到全局一致,给出各个体关于虚拟结构中心信息与全局均值之间差值随时间变化曲线如图3所示。
图3 虚拟结构中心一致误差图
由图3可以看出,利用文中所提分布式一致虚拟结构法,各制导炸弹仅通过与其邻居节点进行信息交互,即可达成制导炸弹群全局关于虚拟结构中心信息的状态一致。
依据文中所提方法,各制导炸弹运动轨迹XY投影及XH投影如图4所示。
图4 制导炸弹运动轨迹投影图
由图4可以看出,利用所提方法,各制导炸弹在下落过程中可以较为理想的飞行轨迹朝各相应理论弹着点运动,各制导炸弹最终落点与最佳弹着点位置如图5所示。
由图5可以看出,文中所提方法可使各制导炸弹落于最佳覆盖弹着点位置,弹着点误差较小,满足实际应用需求。
5 结论
1) 针对面向区域目标的制导炸弹群控制问题,建立制导炸弹群水平面及铅垂面运动模型。
2) 针对区域目标最佳覆盖毁伤打击问题,基于Voronoi图,给出各弹体最佳弹着点计算方法。
3) 针对制导炸弹群下落过程中的控制问题,建立一种分布式一致虚拟结构控制方法,实现下落过程队形可控。
4) 后续研究制导炸弹实际动力参数模型下的单弹体控制律优化设计问题。