倾转机翼/旋翼机过渡姿态规划分析
2024-02-01王宗辉杨云军
王宗辉,杨云军
(1.中国航天空气动力技术研究院, 北京 100074; 2.彩虹无人机科技有限公司, 北京 100074)
0 引言
倾转旋翼机是一种结合了传统直升机悬停能力和固定翼飞机高速巡航能力的先进飞行器,它优异的飞行性能使其既可以作为伴随海军中大型水面舰艇或陆军野战部队的支援保障飞行平台,又能成为复杂地形执行侦察打击任务的有力武器。倾转旋翼机在兼具2种传统构型飞行器优点的同时,也存在诸多研发设计挑战[1]。一方面,倾转旋翼机在以直升机飞行模态下垂直起降或悬停时,旋翼与固定翼之间产生复杂的气动干扰问题,导致飞机悬停性能和爬升性能下降,增加了倾转旋翼机的功率损耗。另一方面,倾转旋翼机在进行悬停模态到固定翼模态转换过程中,倾转旋翼、机身以及短舱存在复杂的姿态变换。
传统构型倾转旋翼机整段机翼固定于机身,这种构型导致在直升机悬停模态下,旋翼下洗气流会碰撞到固定翼表面,产生“喷泉效应”,从而使整个飞行器的悬停效率下降[2-5]。为了提高倾转旋翼机悬停效率,欧洲的ERICA项目中提到将机翼部分分为与机身连接的固定段以及随短舱倾转的旋转段[6-7]。虽然后续众多学者对带有倾转机翼段的倾转机翼/旋翼机进行了悬停状态气动效率分析计算[3,8],但对它的倾转过渡姿态规划却少有研究。
倾转旋翼机的倾转过渡状态是一种带有复杂气动干扰的变构型飞行过程[9-12]。在倾转过程中,飞行器前飞速度、旋翼桨距角、机身与固定翼迎角都会随着短舱倾转角的变化而变化。为了实现平稳过渡飞行,倾转旋翼的拉力与机翼的升阻力需要保证在不同角度和飞行速度工况下达到动态平衡。Wang等[13]建立了针对共轴旋翼无人机的多飞行状态纵向飞行平衡方法。Maisel等[14]在XV-15倾转旋翼机报告中列举了倾转过程飞行数据,但没有关于倾转走廊方面的计算研究。曹芸芸[15]将倾转走廊计算分为低速段和高速段,根据前飞速度过低可能导致机翼失速,以及前飞速度过高可能受到发动机功率限制等因素进行了倾转角度-速度包线计算。陈皓[16]采用同样方法计算了传统构型倾转旋翼机倾转走廊,并研究了匀速、加速前飞状态下飞行器倾转过程的非定常气动特性。左卓等[17]将倾转走廊计算过程分为旋翼操纵段和非旋翼操纵段,并通过发动机需用功率进行了校核。Ma等[18]建立了包含推进方向、空速和飞行高度组合的三维倾转走廊。目前对于传统构型倾转过渡状态气动干扰研究相对较多,但对于倾转机翼/旋翼机倾转走廊研究较少,并且对于倾转过程前飞速度、旋翼桨距角、机身迎角姿态规划研究更少。
本文中对机翼外段随短舱倾转的倾转机翼/旋翼机进行了倾转过渡状态的计算分析。提出一种基于动量叶素理论的高速段倾转角度-速度包线计算方法,采用低速时机翼失速限制和高速时旋翼可用功率限制来确定倾转过渡走廊,对比了传统构型倾转旋翼机和倾转机翼/旋翼机的倾转过渡走廊差别。最后对2种构型倾转旋翼机倾转过渡状态下前飞速度、机身迎角、旋翼桨距角姿态进行了规划分析。
1 倾转走廊计算模型
倾转旋翼机在倾转过渡过程中,需要满足旋翼拉力水平分量能够平衡整个飞行器阻力,同时机翼升力与旋翼拉力垂直分量需要保持与飞行器重力相等。在连续倾转过程中,对应于每一个短舱倾角都存在一个前飞速度范围。一方面前飞速度过低可能导致机翼失速,另一方面当前飞速度太高时,则会受到发动机可用功率、动力稳定性等条件限制[19]。本文中倾转走廊低速段倾转角度-速度包线计算方法参考文献[15],而高速段采用一种基于动量叶素理论计算旋翼限制功率的方法来确定最大前飞速度。在此基础上,通过对传统构型计算模型的进一步改进来计算带有倾转机翼的新构型倾转旋翼机倾转走廊。
1.1 低速段倾转走廊边界
求低速段倾转走廊边界主要限制条件是整个倾转过程中机翼不能发生失速情况。由于旋翼系统纵向周期变距的存在,倾转旋翼机即使在悬停状态,发动机短舱仍可以向前倾转一定的角度[20]。因此,需要先求得倾转过程起点的最大前倾角
(1)
式(1)中:in为发动机短舱角,其中短舱与机体水平线垂直时为90°,平行时为0°;a1为旋翼桨盘后倒角;xm、ym为旋翼桨毂中心相对飞行器重心得纵向和垂向距离。悬停时的最大后倒角可表示为
(a1)max=(-B1)max
(2)
式(2)中:B1为旋翼的纵向周期变距。图1给出了飞行器倾转过渡过程的受力分析图,图中αf为机身前飞迎角。

图1 倾转过程受力分析
倾转旋翼机在倾转过渡阶段保持力的平衡关系需要满足:
Tsin(in+a1+αf)+L=G
(3)
Tcos(in+a1+αf)=D
(4)
求低速段倾转走廊边界流程:首先,机身与固定翼部分采用机翼临界失速迎角状态,并采用CFD方法求得此时机身与固定翼部分升阻力与前飞速度的关系并拟合函数表达式L(v)、D(v);根据纵向周期变距以及旋翼桨毂中心相对飞行器重心的位置利用式(1)、式(2)求得悬停状态最大前倾角,确定需求的短舱倾转角in取值,进而得到in+a1+αf;最后将求得L(v)、D(v)、in+a1+αf代入方程(3)、(4)联立求解得到该短舱倾转角下的最小速度v以及旋翼拉力T。当机翼存在与短舱同时倾转段时,L(v)、D(v)分别由2部分组成:
L(v)=L1(v)+L2(v)
(5)
D(v)=D1(v)+D2(v)
(6)

1.2 高速段倾转走廊边界
高速段倾转过程同样需要满足升力与重力、前飞拉力与阻力的平衡关系,同时最大前飞速度还要受到旋翼前行桨叶压缩性、后行桨叶失速效应以及旋翼可用功率等限制。在本文中基于动量叶素理论提出一种可计算不同来流夹角下旋翼功率的方法来确定最大前飞速度。
不同来流夹角下的动量理论计算公式可以表示为

(7)
叶素理论计算公式可以表示为

(8)

由上述动量叶素理论求得的功率P1只包括了诱导功率、废阻功率和爬升功率,考虑到旋翼诱导速度的非均匀性,添加修正系数κ=1.15。型阻功率P2则可表示为[21]
(9)
式(9)中:σ为旋翼实度;Cd0为旋翼等效阻力系数(即桨叶典型剖面的常数阻力系数值);R为旋转半径。考虑到发动机功率损耗10%,实际旋翼总功率P应小于0.9Pe,其中Pe为发动机额定功率。
综上所述,求高速段倾转角度-速度包线功率限制表达式可写为
P=κP1+P2≤0.9Pe
(10)
根据发动机短舱倾转角的变化,通过高速段倾转走廊边界计算模型可以求得倾转角度-速度包线,需要注意的是,高速段倾转角度-速度包线上发动机短舱角45°对应的速度为中止速度,倾转过程中飞行速度不能大于中止速度[22]。
通过建立的低速段、高速段倾转走廊计算模型,以文献[17]倾转旋翼飞行器为例,计算其倾转过渡走廊,并用文献中仿真飞行轨迹进行对比校核,对比结果如图2所示。通过对比可以发现本文中计算的倾转走廊飞行速度能够跟踪上轨迹剖面,满足飞行器的速度安全性指标。
图2 倾转走廊计算模型验证
2 倾转过程计算分析
采用如图3的传统构型倾转旋翼机以及新构型倾转机翼/旋翼机分别计算了它们的倾转过渡走廊,并选择一条倾转角-速度过渡方案,对比分析了它们不同倾转角度及前飞速度下旋翼桨距角和机身迎角姿态变化。
图3中2种构型倾转旋翼机外形差异在于倾转机翼/旋翼机为减少悬停垂直起降状态下旋翼与机翼面的气动干扰,采用了部分机翼跟随短舱倾转方案。倾转旋翼机旋翼有2片高扭转桨叶,旋翼轴可向后倾转5°,为扩大倾转走廊计算宽度,襟副翼舵偏30°。其他主要参数如表1所示。

图3 倾转旋翼机模型

表1 倾转旋翼机主要参数
2.1 最小速度计算流程
为了对比分析倾转机翼部分占比对倾转过渡走廊的影响,分别计算了无倾转机翼构型A、倾转1/3机翼构型B以及倾转1/2机翼构型C的过渡走廊。


图4 机身与固定段机翼升阻力
通过式(1)可以求得悬停时最大前倾角为80°,然后依次取in=60°、45°、30°、0°,将in、a1=5°、αf=12°代入式(3)、式(4),求得对应倾转角下的最小速度如图5所示。
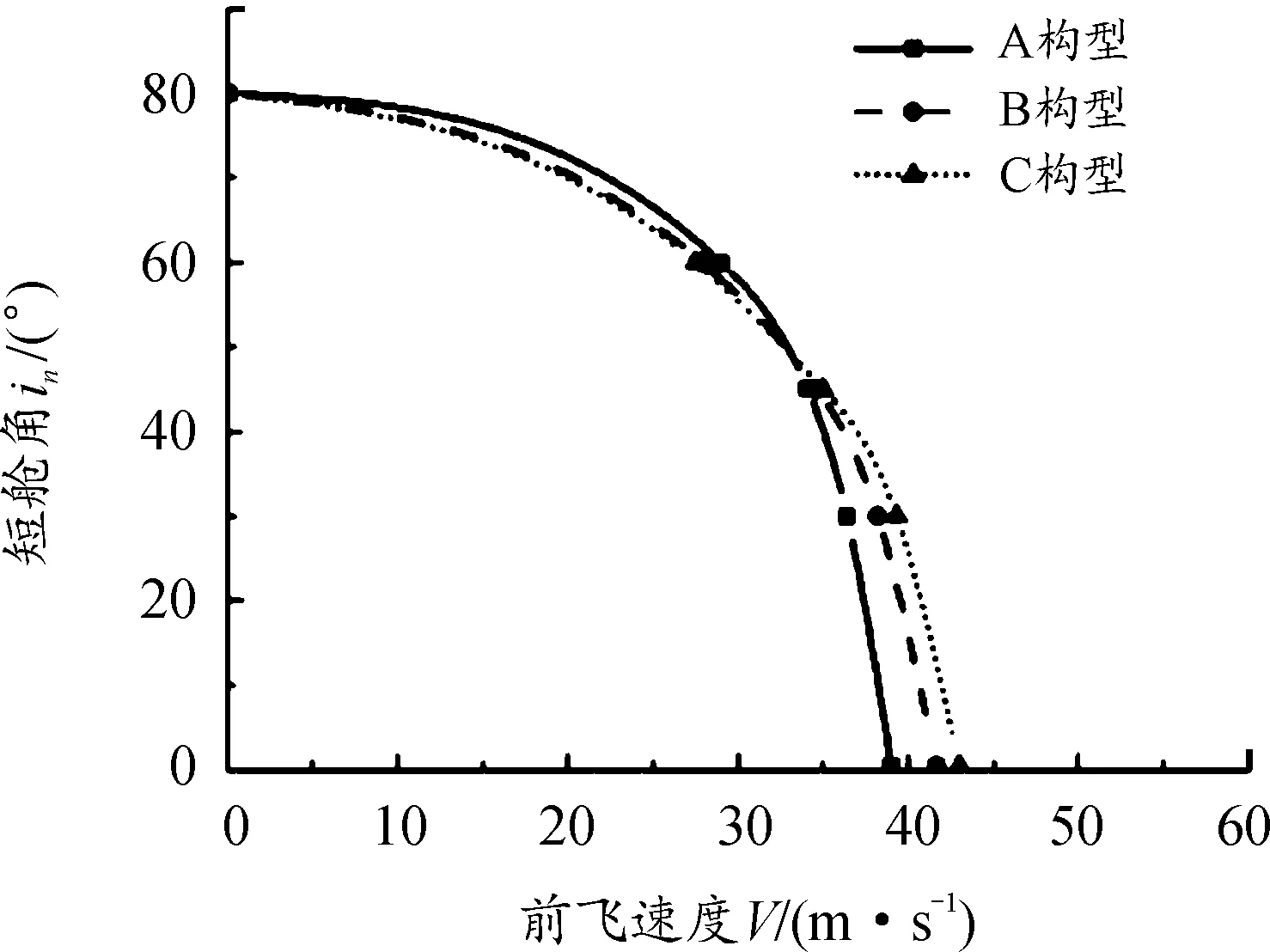
图5 低速段倾转角-速度包线
2.2 最大速度计算流程
采用高速段倾转角度-速度包线模型计算最大速度时,首先计算出机身加机翼在不同迎角αf(-6°~6°)下的升阻力,并拟合出关于速度v的函数如图6、图7,带有倾转机翼构型采用与2.1节同样方法求得机身机翼总升阻力。

图6 传统构型不同迎角升力分布

图7 传统构型不同迎角阻力分布
由于纵向周期变距的原因,求最大速度时短舱倾转角从95°开始,采用同样的方法将倾转角代入式(3)、式(4),首先采用最小迎角-6°时机身与机翼升阻力拟合函数,联立方程求得速度,然后由式(4)可以求得此时的需用旋翼拉力,代入动量叶素理论计算程序可以求得此时桨距角以及功率,进而由校核式(10)检验功率是否在发动机限制功率范围内,若满足功率要求则此时求得的速度即该倾转角度下的最大速度,若不满足功率要求,则依次递增代入其他迎角下的机身与机翼升阻力拟合函数,直到最终功率在限制范围以内。最终求得的高速段倾转角-速度包线如图8所示。

图8 高速段倾转角-速度包线
综合最大速度与最小速度,可以得到3种构型倾转旋翼机的倾转过渡走廊如图9所示。
通过倾转过渡走廊可以发现,随着倾转机翼段占比增加,倾转过渡走廊变窄,飞行器倾转操纵难度加大,安全性降低。由图9可以看出,在倾转过渡前期,倾转机翼对低速段速度边界影响较小,而对高速段速度边界影响较大。在倾转过渡小于45°的后期,倾转机翼对低速段和高速段都具有较大影响,在即将完成倾转过渡的0°短舱角状态,倾转1/2机翼构型前飞速度范围为43~48 m/s,倾转1/3机翼构型前飞速度范围为41.7~51.2 m/s,传统构型前飞速度范围为39~57 m/s。考虑到倾转1/2机翼构型C倾转走廊过于狭窄,飞行器实际飞行过程中操纵难度过大,最终选择无倾转机翼构型A与倾转1/3机翼构型B进行倾转过程姿态规划对比。

图9 倾转走廊分布
3 倾转过程姿态规划
如图9规划路径所示,根据倾转过渡走廊规划A构型与B构型倾转旋翼机短舱倾转角-速度路径如表2所示。

表2 倾转过程速度规划
以60°短舱倾转角为例,假设纵向周期变距角取为0°,此时前飞速度35 m/s,机身迎角为αf,通过式(3)、式(4)得:
Dtan(60+αf)+L=4 000
(11)
如图10所示,此时L(αf,v=35)、D(αf,v=35)取值与机身迎角αf(-6°~6°)相关,通过迭代可以分别求得此时2种构型机身前飞迎角αf,A=5°、αf,B=2°。由式(4)可以得到2种构型单边需用旋翼拉力TA为1 200 N,TB为2 465 N。

图10 前飞迎角计算曲线
将旋翼拉力、前飞速度、倾转角度、机身迎角等参数代入动量叶素理论计算模型,通过牛顿迭代法求得对应工况下旋翼桨距角并通过功率限制式(10)进行校核。通过图11可以发现,A构型桨距角θ0.75=8°,B构型桨距角θ0.75=12°。

图11 旋翼桨距角计算曲线
采用同样的方法可以对其他倾转角过程进行迭代求解,整个计算流程如图12所示。最终得到A构型与B构型倾转旋翼机倾转过程如表3所示。
通过倾转过程可以发现,随着倾转旋翼机倾转过渡开始,机身迎角以负迎角开始,产生前飞拉力分量。随着倾转角度变小,机身迎角和桨距角变大。在60°时存在一段过渡阶段,在该阶段由于垂直旋翼桨盘来流速度过小,导致机身需要采取大迎角来分担垂直方向拉力。此时斜入流速度过大,大扭转角旋翼桨叶容易发生失速,因此桨距角相应小幅度降低。在短舱角大于45°的倾转过渡前期,带有倾转机翼段的B构型在相同的前飞速度以及短舱角状态下,机身迎角相较于传统构型整体降低约2°,而旋翼桨距角增大1°到4°范围。B构型相较于A构型随着倾转角变小,差距越来越小,这是因为在小倾转角的情况下,倾转机翼部分以大迎角前飞,导致阻力过大,需要的桨距角同样变大以提高旋翼拉力。机身部分为降低整体阻力,迎角也相应降低,当倾转过渡过程接近完成时,2种构型差异越来越小,直到倾转完成,倾转角为0°时,2种构型完全重合,因此同样前飞速度下,机身迎角和桨距角相同。
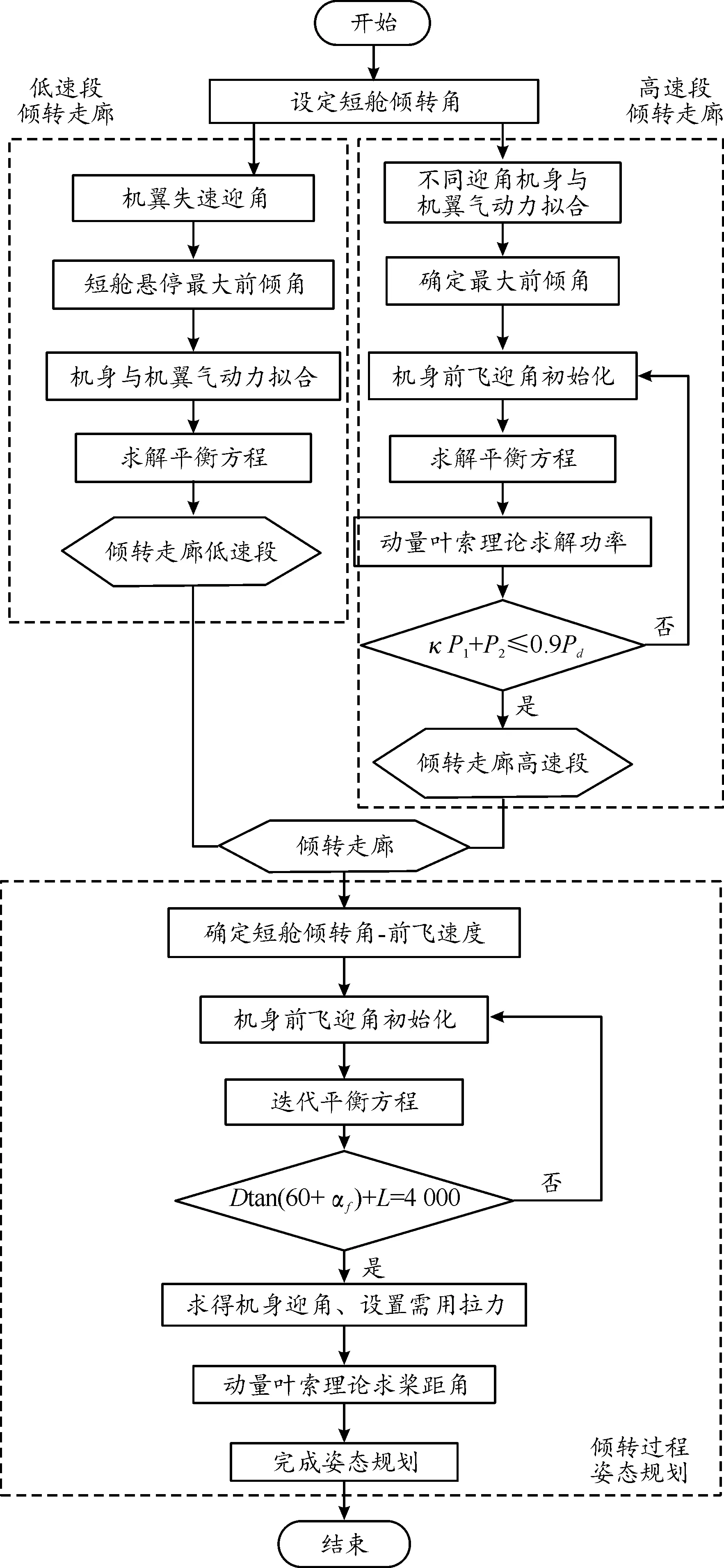
图12 倾转过程规划流程图
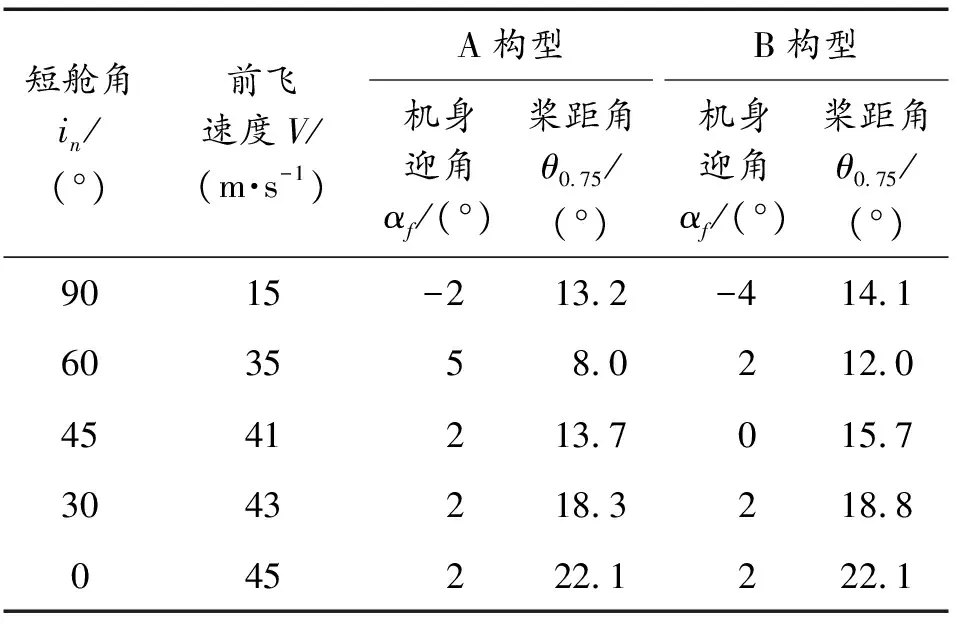
表3 倾转过程姿态
4 结论
针对倾转旋翼机复杂的倾转过渡状态,提出一种计算倾转走廊的方法,在低速段满足机翼不发生失速状态确定倾转角度-最小速度,在高速段根据发动机功率限制,采用斜入流动量叶素理论计算模型确定倾转角度-最大速度。对比了传统构型与倾转机翼/旋翼机的倾转走廊差异,最后对2种构型倾转旋翼机进行了倾转过程姿态规划,得到如下结论:
1) 采用最大迎角机翼不失速限制与动量叶素理论求解功率限制相结合的方法能够求得较高精度的倾转走廊,该方法既可以用于传统构型倾转旋翼机工程研究,也可以用于带有倾转机翼等新构型倾转旋翼机的探索研究。
2) 带有倾转机翼的倾转机翼/旋翼机相较于传统构型倾转旋翼机具有更窄的倾转走廊,并且随着倾转机翼占比的不断扩大,倾转走廊越来越窄,飞行器操纵性难度越来越大。在倾转过渡前期,倾转机翼对低速段速度边界影响较小,而对高速段速度边界影响较大,在倾转过渡小于45°的后期,倾转机翼对低速段和高速段都具有较大影响。
3) 在同样的前飞速度和倾转角飞行工况下,带有倾转机翼的倾转机翼/旋翼机与传统构型倾转旋翼机倾转过程姿态不同,带有倾转机翼构型更容易达到发动机功率最大限制,在倾转前期与传统构型的机身迎角以及旋翼桨距角差距更大,随着倾转过程接近完成,2种构型的飞行姿态接近相同,最后随着倾转角变为0°,2种构型姿态达到完全一致。