基于离轴四反的空间引力波探测激光发射望远镜设计
2024-01-28范子超王海博赵璐佳冀慧茹姜治渝彭如意付利平马冬林
范子超,谈 昊,莫 言,王海博,赵璐佳,冀慧茹,姜治渝,彭如意,付利平,马冬林
1 华中科技大学 物理学院,湖北 武汉 430000;
2 华中科技大学 光学与电子信息学院和武汉光电国家实验室,湖北 武汉 430000;
3 深圳华中科技大学研究院,广东 深圳 518057;
4 中国科学院国家空间科学中心,北京 100190
1 引言
2015 年,地基引力波观测站LIGO (Laser interferometer gravitational-wave observatory) 观测到两个黑洞合并时产生的引力波信号GW1501914,直接证明了引力波的存在[1]。地基的干涉引力波探测是臂长在千米尺度的迈克尔逊干涉仪,其灵敏度可以探测到双中子星、中子星-黑洞以及双黑洞等双星系统产生的引力波,但是同时也能感知到地面上如地震和海洋涌动等的背景噪声[2]。这类背景噪声和地球引力场变化产生的重力梯度噪声在1 Hz 以下的频段占主导地位,导致了地基的引力波观测站难以探测到1 Hz以下的低频引力波信号,这是建造空间引力波观测站的主要原因[3]。由于在宇宙空间中难以维持地面上的臂长稳定性,目前正在进行的空间引力波探测项目,如LISA、DECIGO、天琴计划、太极计划,普遍采用外差干涉的方式进行探测[4-8]。这些正在计划建设的空间引力波天文台,都由三个独立的航天器组成的等边三角形编队组成,其中天琴与其他计划的不同之处在于采用地心而非日心轨道。激光干涉的长路径测量发生在不同的航天器的光学平台之间,每个航天器链路都需要一对望远镜来进行激光束的传输。
用于空间引力波探测的望远镜必须给另一个遥远的航天器上的探测器提供有效的光功率,并且保证传输链路的光程稳定,以满足引力波探测科学项目对精密干涉测量的需求。与传统的望远镜相比,另一个显著的不同在于用于空间引力波探测的望远镜双向工作,既发射本地光束向远处的航天器,同时也接收来自远处航天器的信号光。因此,这类望远镜的设计要求可以分为两类。首先,应保证望远镜光程的稳定性。望远镜系统应具有远超衍射极限的波前畸变,以避免测量时引入额外的相位噪声。此外,由于空间环境存在不可避免的视场抖动,抖动带来的角度失调会引起测量相位的误差,这种噪声通常被称为抖动光程耦合(TTL)噪声[9-10]。在光学设计中,应尽量保证波前误差的相位分布在捕获视场内平坦,以消除或者最小化视场抖动造成的光程长度读数误差[11]。其次,设计方案应尽量抑制望远镜系统内部的杂散光。由于望远镜同时接收和发射光束,本地发射的激光光束在镜面上反射时引起的背向杂散光会耦合到测量光束中,造成测量相位的误差[12]。预期可容许的杂散光噪声水平大致和远处航天器上光电探测器接收到的信号光功率一致。尽管研究表明,光学镜面上的一些特殊的镀膜图案可以在一定程度上抑制共轴方案中望远镜副镜造成的背向杂散光,但现在望远镜设计仍然普遍采用工程化风险更小的离轴反射式结构来避免背向杂散光[13-15]。
望远镜设计可以参考经典的卡塞格林式的TMA(three-mirror anastigmat)结构,其离轴性能好并且便于加工制造[16-20]。在设计引力波探测星载望远镜时,设计动机不同可能导致一些不同的选择,大多数指标与常规的成像望远镜类似。LISA 项目从上个世纪90年代提出空间引力波探测的概念起,就开始了对星载望远镜系统的研究[21],已经公开了多代望远镜系统的设计方案,其中以TMA 为基础的离轴四反方案为研究重点。类LISA 的空间引力波探测项目中望远镜的规格大多参考了其方案,各自根据项目需求提出了高性能的星载望远镜设计。除了离轴化的结构,望远镜的光学设计中也逐渐探索出了抑制背向杂散光的方案。在望远镜的副镜和三镜之间通常设有中继的像面,在像平面处设置视场光阑可以有效屏蔽视场外的部分杂散光。出于类似的考虑,望远镜系统设有实出瞳作为光学平台上的接口,在出瞳位置上设置遮光光阑可以遮挡大部分科学视场外的杂散光。望远镜的发展与工艺水平相关[22],研究显示,目前工艺上可加工的镜面表面质量,可以保证背向杂散光水平满足子系统的噪声预算[23]。
尽管如此,望远镜系统的光学设计仍然具有改进的潜力,尤其是考虑到TTL 耦合噪声的性能。在大口径的望远镜设计中,抑制扰动在各个系统中都会涉及[24],而LISA 项目组和太极团队对光学设计中关于TTL 耦合噪声的机理以及相关仿真平台的建立进行了深入的研究。Schuster 等人基于等光程原理,在数值仿真的基础上通过实验证明了在光电探测器前设计光学成像系统可以抑制TTL 噪声[11]。中国科学院长春光机所的王智团队研究了望远镜不完美成像引起的波前退化对TTL 噪声的影响,对不同RMS 值的波前误差以及不同类型的像差进行了仿真测试[25-26]。Livas 等人提出,由于望远镜是一个无焦的光学系统,光瞳像差提供了关于有限远的入瞳和出瞳之间光程稳定性的更直接的描述。LISA 团队发现未校正光瞳像差的系统中,追迹主光线得到的出瞳面上的足迹显示出明显的坐标偏移,导致实际测试中TTL 噪声超过了预期值。LISA 望远镜的设计通过光瞳像差的校正进行了升级,减少了光线在出瞳面的坐标偏移,包括TTL耦合噪声在内的指标均达到了设计要求[27]。由此可见,以TTL 耦合噪声或者光程稳定性为主导的望远镜设计已经成为系统升级的重要研究方向。
本文介绍了天琴计划任务中关于望远镜光学系统设计方面的最新进展,重点讨论了望远镜像差控制和TTL 耦合噪声方面的重大挑战。首先依次对望远镜设计指标进行了简要回顾,对精密测量涉及到的波前质量和光程稳定性进行了重点分析。然后以泽尼克多项式拟合出瞳处不同相位分布,建立了望远镜像差与TTL 耦合噪声的模型,并且强调了光瞳成像在此模型中的重要性。在几何光学的框架下分析了光瞳像差的行为,结合初级像差理论以及光瞳像差理论完成了傍轴结构的设计。在系统离轴化过程中,提出了主光线RMS 半径的概念,用以在优化过程中量化地评价高阶光瞳像差的平衡。同时结合主光线散点图,在光学设计软件Zemax 中建立了较完整的光瞳像差优化和可视化评价的工具。最后,通过数值仿真的方式分析了望远镜的设计残余像差对光程稳定性的影响,验证了提出的设计方案的可行性。
2 望远镜设计规范与需求分析
天琴望远镜的设计规范如表1 所示,其中大多数指标与类LISA 项目相似,轨道的不同导致一些不同的设计选择。天琴计划的航天器计划绕地球轨道运行,航天器组成边长为17 万千米的正三角形编队。对于星载望远镜设计来说,温度梯度引起的非旋转对称的离轴像差在以地球为中心的轨道上更受关注。波前质量和稳定性(光程稳定性和杂散光稳定性)与绕日轨道相比,必须进一步提高来应对热稳定性的退化。此外,望远镜之间的距离减小,意味着允许望远镜适当减小口径,在保证收集到足够的信号光功率的同时减轻望远镜的质量。

表1 天琴望远镜的光学指标Table 1 Specifications of the TianQin telescope
望远镜的工作波长由干涉测量系统中使用的激光器决定,其中激光器的频率稳定性是一个重要的考虑因素。Nd: YAG 激光器为系统提供f0=c0/λ的初始频率,再通过声光调制获得稳定的外差频率,其中c0为真空中的光速[28]。斯特列尔比是衡量能量传递效率的重要指标,通常以斯特列尔比大于0.8 作为光学系统满足衍射极限的判据。单个测量链路的斯特列尔比大于0.9,那么在收发系统同时工作时则有S=0.92=0.81,满足衍射极限的需求,此时对应的波前质量为λ/20[29]。考虑到给光学平台上的其他光学元件留有余量,望远镜子系统预分配的RMS 波像差大约为λ/40。设计残余的RMS 波像差预算为λ/300,在1064 nm 的工作波长下大约为3.55 nm。捕获视场是根据建立激光链路接收信标信号以获取初始指向来设定的,和选择的轨道以及捕获时间有关。由于光速相对于航天器间十几万千米的臂长有限,因此工作时发射望远镜需要提前指向接收望远镜的位置。科学视场是指完成正常科学操作的角度,它必须能容忍提前指向角度在选择轨道下的静态偏移和动态变化的范围[30]。入瞳直径决定了望远镜远场可接收区域的大小,因此必须保证接收望远镜收集到的激光功率能满足探测灵敏度的要求。无焦的望远镜本质上是一个大型的准直器,无焦放大倍率数值上等于系统入瞳和出瞳的比值,实际上主要受光学平台接口处的尺寸影响。天琴系统中望远镜的背向杂散光预算与信号光功率有关,需要杂散光功率小于激光光源功率的10-10。望远镜的光程稳定性与光程噪声和指向精度有关,皮米量级的光程稳定性需要大约0.025 nm/μrad 的TTL 噪声水平[31]。
3 望远镜像差和TTL 耦合噪声模型
3.1 望远镜的远场相位
如图1 所示,本地激光器发出的高斯光束经过望远镜扩束后从本地的望远镜主镜出射,传播17 万千米后被另一个望远镜主镜接收,其中主镜的半径R为110 mm,激光器的波长为1064 nm[25]。
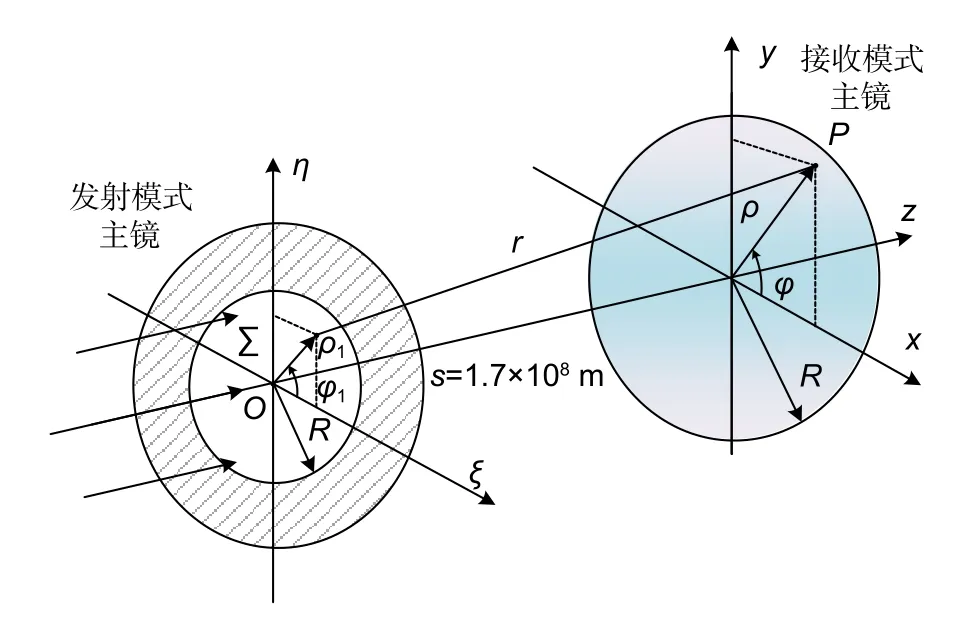
图1 发射高斯光束的夫琅禾费衍射模型Fig.1 Fraunhofer's diffraction model for transmitting Gaussian beam
高斯光束在主镜出射时发生衍射,且满足s≫kR2/2的夫琅禾费远场近似条件,接收望远镜主镜上的光场为
其中,E(ξ,η)为孔径面Σ 处的光场,可以表示为
其中:k=2π/λ为波数,w0表示高斯 束腰半径,表示高斯光束传播到z处的光斑半径为高斯光束的准直距离,高斯光束复参数q=(z-z0)+izr,E0为高斯光束振幅的常数因子。在束腰位置处基模高斯光束的相位为平面,其强度分布为
总功率P可以表示为
天琴任务中激光器发射的高斯光束的功率为1 W,因此对高斯光束的能量进行归一化,利用式(3)和式(4)可以计算1 W 的高斯光束对应的常数因子En。能量归一化后在Matlab 软件中通过数值积分的方式得到远场的波前分布。
图2(a)和2(b)分别展示了无像差的理想状态时接收面上的强度分布和相位分布,相位对应的光程误差小于皮米量级。实际光学系统不完美成像会导致波前退化,此时的额外相位误差可以表示exp(i2πΔW)。除了望远镜设计的残余波前误差,加工制造以及装调的误差水平预计大约为λ/40。通过随机生成37 阶泽尼克多项式系数,可以生成λ/40 水平下波前的波前分布,以及估计此波前误差对远场相位的影响。图2(c)中给出了在孔径面上利用泽尼克多项式生成的波前相位分布,图2(d)展示了带有波前误差的远场相位分布,结果显示RMS 误差减小到大约λ/182 的水平。远场的相位误差相比发射时变的平坦,更详细的全系统的分析会在以后的工作中讨论,在本文下面对光学系统的设计讨论中,接收到的波前近似为平面波处理。

图2 远场波前。(a)衍射强度分布 ;(b)衍射相位分布;(c)生成的λ/40 波前误差;(d)带有λ/40 波前误差的远场相位分布Fig.2 Far-field wavefront.(a) The diffraction intensity distribution;(b) The diffraction phase distribution;(c) The generated phase with wavefront error of λ/40;(d) The diffraction phase distribution of the far field with wavefront error
3.2 望远镜像差与TTL 耦合噪声
如图3 所示,望远镜对接收到的远场波前进行压缩,并且以出瞳为接口出射到光学平台上,与本地的参考光束进行干涉测量。由于在探测时只关心相位误差导致的光程信号的变化,下面进行讨论时假设忽略了振幅。望远镜接收到的测量光束的相位分布近似为平面波,假设测量光束沿着z轴方向传播,其光场可以表示为

图3 望远镜像差和TTL 耦合噪声模型Fig.3 Modeling of wavefront aberration and TTL coupling noise
其中:w为频率,ϕ为初始相位。假设望远镜系统的波像差可以表示为ΔW,并且忽略光学平台上其他光学元件的像差,平面波经过望远镜系统后的场可以表示为
航天器的抖动使得对准时的角度出现失调,导致平面波的波前发生倾斜,测量光束在XOZ平面内绕出瞳中心P点旋转角度θ。如图3 所示,z=0 的位置设置在光电二极管的平面,旋转点P的位置矢量为
旋转前任意位置的坐标点为:
经过旋转,rplane在新的坐标系中位置矢量可以写成:
其中,Mrot为绕y轴旋转的矩阵:
倾斜传播平面波的光场表达式可以通过坐标变换得到:
参考光束用基模高斯光束来描述更加合适,其电场表达式为
参考光束和测量光束之间的光程差信息包含在两束光场的叠加项的复振幅中,通过对探测区域上的强度积分可以得到相位信息[9]:
复相位可以通过波数k转化为光程信息:
望远镜的像差ΔW对TTL 耦合噪声的影响可以通过光程信号对角度的灵敏度来评价,在仿真计算中通过光程对角度的微分来计算:
3.3 光瞳像差理论
天琴望远镜是一个无焦系统,相比像平面像差的无穷远共轭成像,光瞳像差描述的共轭关系更适合此光学模型中的消除TTL 噪声的设计目标。光瞳像差在这里更多地描述了不同光学系统间的共轭关系,保证整个系统精确的坐标对准。LISA 团队认为光瞳像差造成的主光线在光瞳上的坐标偏移,导致了实际测试中TTL 噪声超出了预期可控制的水平,因此提出了光瞳像差校正的概念,实际的仿真结果也表明,光瞳像差的平衡导致了TTL 噪声的快速收敛。
光瞳像差概念一种便于理解的解释为,光瞳成像是成像过程中交换了像差公式中边缘射线和主射线的作用,即在光瞳成像的过程中,物平面和像平面为系统的“入瞳”和 “出瞳”,而原本的光瞳被认为是物和像[27]。图4 显示了光瞳成像的过程,光瞳像差可以理解为假设物放置在入瞳处时在出瞳处观察到的像差。对于天琴望远镜这个典型的无焦系统来说,光瞳像差指导了光线在光瞳平面的坐标对准以及与光学平台上其他子系统之间的耦合,在评价函数中加入对光瞳像差的限制显然可以更准确地反映出用于精密测量的设计需求。此外,交换了特征光线的角色后,主光线决定成像位置,而边缘光线决定成像高度。这种转换关系表明只需要从熟知的像平面像差理论入手,再进行简单的代数变换就可以得到光瞳像差的表达式。
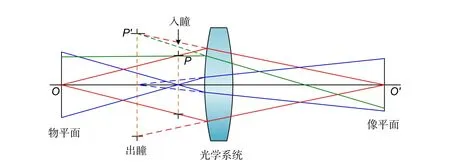
图4 光瞳成像过程中主光线和边缘光线的作用Fig.4 Function of the chief ray and marginal ray in pupil imaging
赛德尔像差只和光学系统的近轴量有关,一般通过下面列出的公式计算[32]:
其中:带横杠表示与主光线相关的量,不带横杠表示与边缘光线相关,y表示光线在表面上的高度,c表示当前表面的曲率,u为光线的孔径角,n为介质的折射率。Δ 符号表示在介质表面折射(反射)前后的变化量,以Δ(u/n)为例,它可以表示为Δ(u/n)=u'/n'-u/n。A和分别定义为边缘光线的折射不变量和主光线的折射不变量,可以写成下面的方程:
L定义为光学系统的Lagrange 不变量,它的值可以通过下面的方程得到:
式(16)中,关于主光线和边缘光线的量进行互换,便可以得到初级光瞳像差的描述:
显然,光瞳像差的波前也可以写成类似Hopkins关于像平面像差的波前级数展开式:
4 望远镜光学系统设计
4.1 望远镜初始结构设计
光学设计的基本系统参数参照表1,此外为了保证制造和测试的便利性,望远镜(不包括机械支撑结构)的光学长度限制在400 mm 以内。近轴的光学布局如图5 所示。望远镜四镜承担的光焦度比较小,因此启动的初始结构可以认为是包含中继像面的TMA设计,随后在优化过程中再逐渐将三镜的光焦度分配到四镜中。对于初始结构建立详细的描述,参考我们团队之前TMA 设计的工作[18],涉及到的初级像差计算公式在上一节中已经给出。初始值设置为y1=110 mm,y′1=5 mm,t1=-500 mm,t3=350 mm。在此阶段处理像差平衡问题时,除了式(16)~(18)中描述的像平面赛德尔像差,初级光瞳像差部分也作为评价函数在光学设计软件Zemax 中进行优化。José Sasián推导了基于近轴光线追迹的高阶像差系数的代数表达式,并且公开了Zemax 中的宏扩展的代码,可以分别输出三阶以及五阶的光瞳像差系数[33]。使用ZPLM操作数将ZPL 宏返回的光瞳像差系数加入评价函数中,可以得到天琴望远镜的初始设计,如表2。

图5 初始结构的近轴光线追迹示意图Fig.5 Schematic diagram of paraxial ray tracing of the initial design
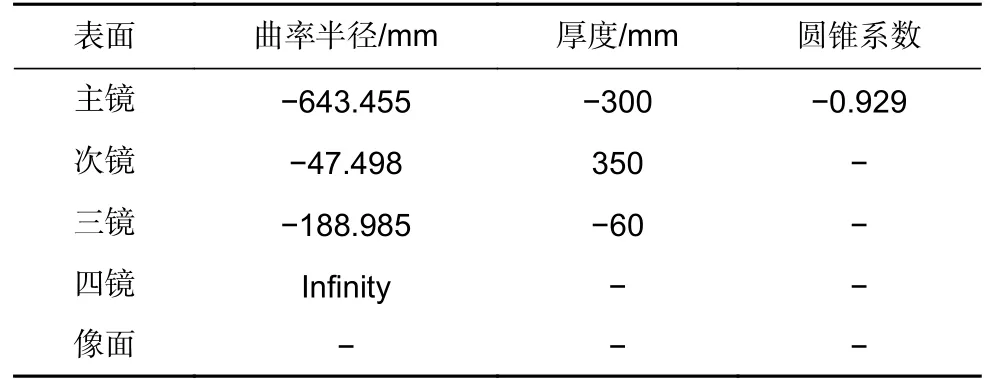
表2 天琴望远镜的同轴初始结构设计参数Table 2 Coaxial initial structure parameters of the TianQin telescope
4.2 光瞳像差评价
为了研究光瞳像差的行为,我们先回顾像平面像差的点列图。不同的场(Hx,Hy)和光瞳坐标(Px,Py)下定义的光线,穿过假定的平面时的(x,y)坐标组成的光斑图。一般选取与物共轭的像平面来进行观察,横向射线像差显示为与参考点的偏差(εx,εy)[32]。这种关系可以扩展到光瞳像差的评价中,根据光瞳的定义,在理想的光学系统中主光线必然经过光瞳中心。由此LISA 项目组的Livas 等人提出了主光线点列图的概念,在全视场下追迹(Hx,Hy,Px=0,Py=0)的光线,得到主光线与出瞳平面相交的坐标,在二维平面上绘出的点列图可以反应光瞳像差的水平。完美成像的系统不存在像差,所有的主光线汇聚成一点,而在非理想状态下,光瞳像差带来的坐标偏移会使得点列图成为一个光斑。主光线点列图的提出为研究光瞳像差的行为提供了有力的研究工具[27]。
进一步地,为了定量地分析光瞳像差的水平,我们提出了主光线RMS 半径的概念。类似于像平面的RMS 半径,主光线RMS 半径定义为
其中:N代表采样点个数,xi表示第i个采样点在光瞳平面上的x坐标,yi为第i个采样点在光瞳平面上的y坐标,带横杠的量表示为相应的算术平均值。尽管本质上与主光线点列图类似,但是RCRMS的提出为光学设计的优化提供了一个合适的度量。采用ZPL宏或者是ZOS-API 的接口,可以通过编程将RCRMS加入到光学评价函数中,进而实现在设计中同时校正像平面像差以及光瞳像差。
4.3 离轴四反设计
为了满足本设计中同时校正瞳孔和像面像差的要求,在设计过程中采用渐进式策略,非球面的数量以及采用的偶次非球面的阶数逐渐增加。可调节的透镜参数,包括表面曲率半径、三镜和四镜的非球面系数、y方向的偏心量和x轴的倾斜角度作为优化的变量。应尽可能保持波前的矢高分布均匀或者对称,并在采样视场的各个方向上稳定,这可以有效地抑制由几何波前误差产生的TTL 耦合噪声。在优化过程中,通过RMS 波前误差和光瞳像差来评价天琴望远镜的成像质量,其中评价函数主要包括Zemax 生成的默认波前误差、光学距离等边界条件以及上节中描述的RCRMS。
经过反复的优化,可以得到最终的设计结果。图6 显示了最终的离轴设计的布局,其中包括三个视场下(-200 μrad、0、+200 μrad)的光线。主镜是一个大口径抛物面反射镜,其他三个反射镜的面型为偶数次非球面。在望远镜系统内部的副镜和三镜之间,设置有一个中间像平面,使得视场外的杂散光可以被放置在焦平面上的光阑屏蔽。三镜和四镜将聚焦的激光束重新准直,并通过出瞳进入光学平台,进入光学平台的光束的宽度约为1.5 mm。基本结构参数和偶阶非球面系数详见表3 和表4。
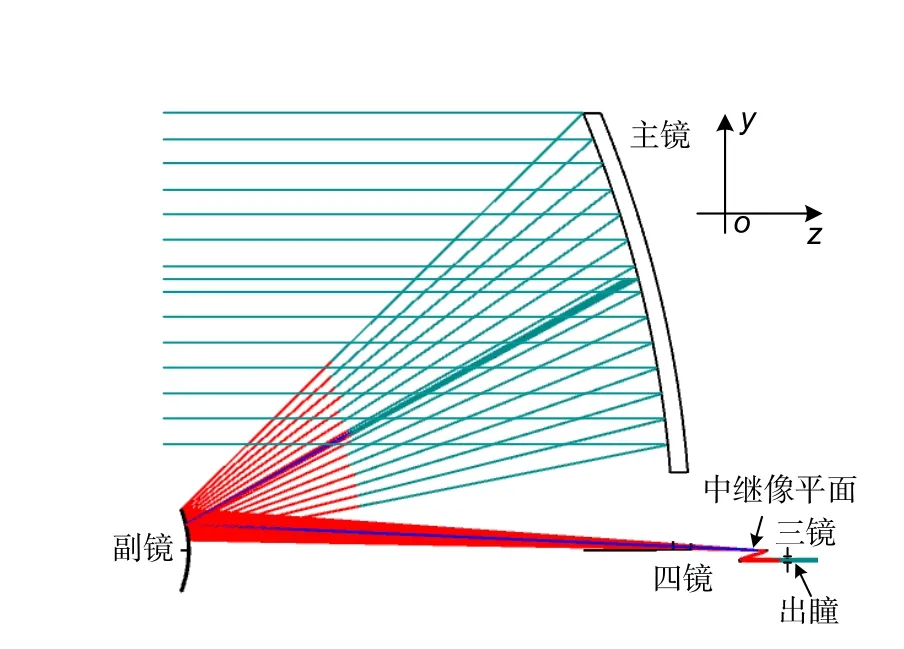
图6 天琴望远镜设计的光学布局Fig.6 Optical layout of the TianQin telescope design

表3 离轴结构设计参数Table 3 Fundamental parameters of final off-axial structures

表4 离轴结构中的偶次非球面系数Table 4 Even-order aspheric coefficients of final off-axial structures
5 性能评价与分析
以捕获视场作为参照,重点优化的对象为科学视场内的主光线。不同视场的波前误差如图7 所示,其显示了在科学视场内望远镜具有均匀的波前分布,并且RMS 波前误差均小于λ/300,满足分配的设计残余像差的噪声预算。图8 中给出了一组不同视场的主光线与出瞳平面相交的位置,蓝色圆圈表示科学视场中的主光线,红色星号表示捕获视场中的主射线。以质心为参考,两个视场下的RCRMS在图中进行了展示。经过计算,结果显示RCRMS-S=0.4710 mm,RCRMS-A=0.0341 mm,其中下标S 和A 分别表示科学视场和捕获视场。我们之前提出的天琴的初步设计中[34],光瞳像差没有被特别地考虑,捕获视场下RCRMS=0.729 mm。对比可以看出,光瞳像差得到了很好的校正,提出的光瞳像差的优化设计方法的有效性得到了验证,同时维持了像平面的高质量成像。
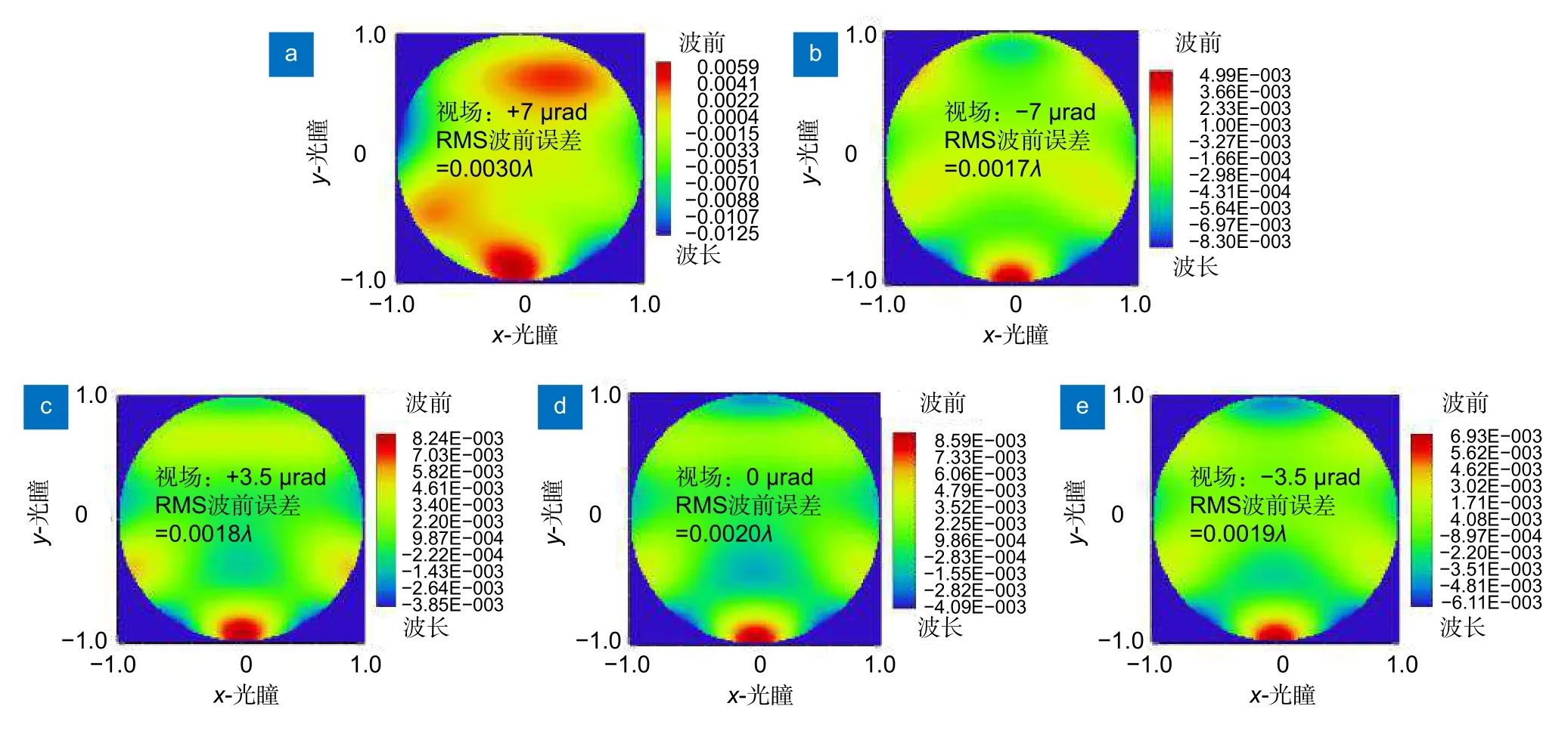
图7 望远镜科学视场的波前误差Fig.7 Wavefront error over the scientific field of view
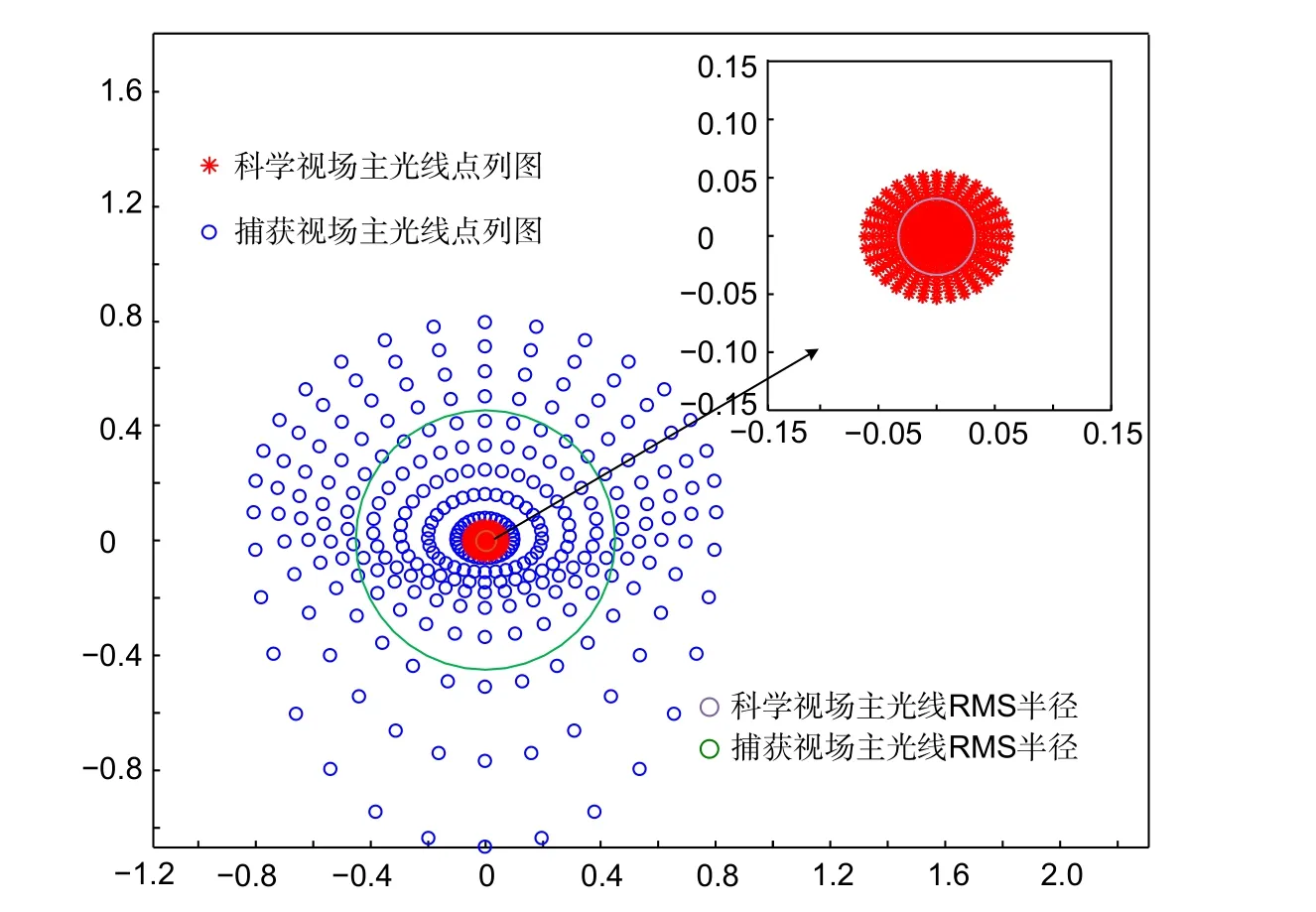
图8 出瞳位置的主光线点列图Fig.8 Chief ray spot diagram in the exit pupil
此外,我们使用前37 阶泽尼克多项式拟合了出瞳处波前的相位分布,用来对望远镜的TTL 噪声进行数值仿真。表5 中给出了Zernike Fringe 多项式的形式以及对应的多项式的系数,系数包括了设计的残余误差以及系统公差分配的结果[35]。式(6)中的波前误差ΔW可以用下面的多项式表示:
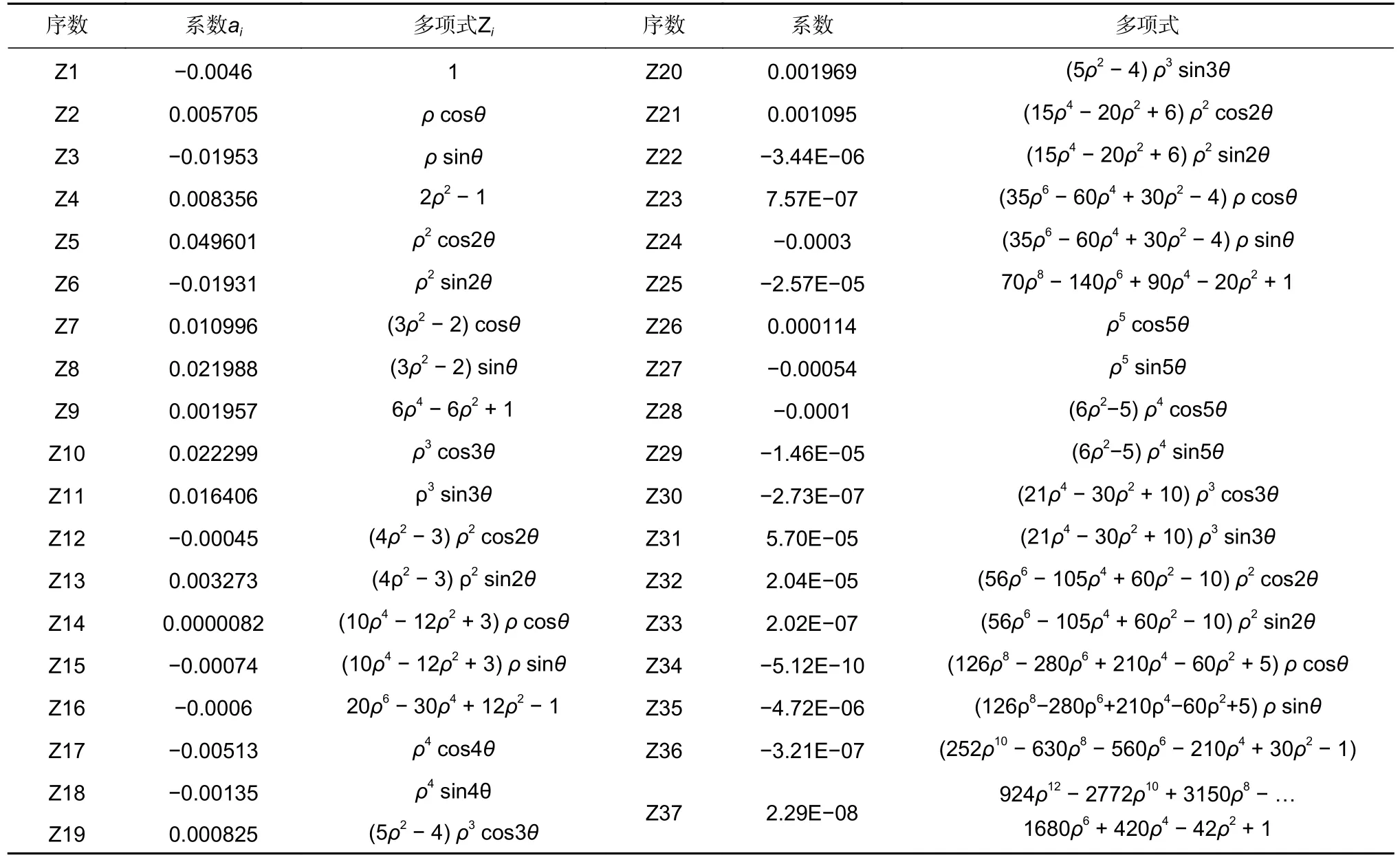
表5 波前误差Zernike Fringe 展开式Table 5 Wavefront error in the form of Zernike Fringe series expansion
利用式(6)~(15)和式(22),在半径为5 mm 的圆形探测区域进行数值积分,得到光程信号随倾斜角度的变化曲线(图9),对光程信号进行微分可以得到此信号对抖动角度的敏感度,结果显示在±300 μrad 的范围内最大的TTL 噪声约为0.0144 nm/μrad,满足对光程稳定性的要求。尽管结果只研究了几何像差的影响,仍然可以看出系统的性能得到提升,对于全链路系统层级的物理光学性能仿真将会在未来的工作中进行探究。

图9 光程信号斜率随倾斜角度的变化曲线Fig.9 Curve of slope of pathlength signal with tilt angle
6 结论
在本文中,我们介绍了天琴计划近期在空间引力波探测望远镜设计方面取得的最新进展,重点包括在望远镜的波前误差控制、光瞳成像行为以及光程稳定性等方面的研究。在望远镜设计时除了考虑到干涉测量超低波前畸变的需求,还对光瞳像差概念进行了讨论,进而对像差和TTL 耦合噪声的关系得到更深入的理解。在研究光瞳像差时,我们从像平面像差入手通过坐标变换推导了初级光瞳像差的表达式,并且通过宏编程开发了在光学设计软件中校正光瞳像差的工具,成功地实现了望远镜的设计。结果显示,望远镜的波前误差远远超过衍射极限,光瞳像差和TTL 噪声的性能相比原有设计均得到了有效的提升。无论是在天琴计划还是其他类LISA 的空间引力波探测项目中,这种同时校正像平面像差和光瞳像差的自动化工具,未来在其他领域也具有一定的指导意义。
尽管目前的参考望远镜设计在概念性的分析和仿真实验上初步表明了诸多需求已经得到了满足,但后续仍然有许多问题需要探索。望远镜的性能有进一步提升的可能,迅速发展自由曲面的制造和加工给望远镜设计提供了更多选择。自由曲面提供的自由度很可能提升现有望远镜的成像质量,无论是接收模式还是发射模式中信号光波前的退化和畸变也会降低,这必然会使得在外差干涉测量中的光程信号读数更准确。随着加工制造以及自由曲面公差分析理论的成熟,未来包含自由曲面的天琴望远镜设计会成为具有潜力的方向。除了望远镜本体,子系统中望远镜的机械支撑结构设计、望远镜杂散光遮光设计、望远镜材料以及热分析等方面均面临选择和挑战。望远镜作为精密干涉测量的组成部分,未来的工作中需要对望远镜系统与干涉仪之间的耦合效应进行探索,以干涉测量为目标指导望远镜的设计。更深入的研究可能需要对部分甚至整个干涉测量链路进行系统层级的物理仿真平台的搭建,用来精准地反映望远镜在仿真测试中的性能,降低工程化的风险,保证实际制造的望远镜以预期的性能工作。更进一步地,我们希望未来制造以及安装一个基本满足任务需求的原型望远镜,以验证设计的可工程化性能并且进行地面上的基本性能的测试。
致 谢
感谢华中科技大学光学与电子信息学院魏诗力博士在本工作中给与的帮助。