基于分布式光纤振动传感技术的地下管廊入侵监测系统
2024-01-26李楚瑞黄祖煜
包 恬,李楚瑞∗,邱 旭,黄祖煜
(1.复旦大学材料科学系,上海 200433;2.珠海大横琴城市综合管廊运营管理有限公司,广东 珠海 519000)
随着我国社会高速发展,集水、电、气等各种市政管线于一体的地下综合管廊逐渐成为城市的大动脉[1]。设置在路面上的井盖作为地下综合管廊的检查口或出入口,发挥着重要作用。偷盗井盖和通过井口入侵地下空间等行为,给地下综合管廊运维带来了极大的安全隐患。目前市面上监控井盖的方法主要有加速度传感器和电磁传感器等,传感数据需通过无线模块发送到中控平台[2-3]。然而,电子传感器易受电磁干扰和潮湿环境的影响,且需长期供电,使得应用受到限制。为有效保障地下综合管廊的安全运行,需要研发可靠、易用的入侵监控系统。
光纤传感技术兴起于20 世纪70 年代末,是一种利用光纤感知外界物理量同时传输光信号的传感技术[4]。与传统电子传感器相比,光纤传感技术具有抗电磁干扰、耐腐蚀、质量轻、可分布式探测等优势,被广泛应用于各个领域[5]。近年来,基于分布式光纤传感的安防预警系统成为研究热点,该类系统也逐渐在地下综合管廊中得到应用[6-8]。但使用中误报率高,如无法区分车辆驶过、挖掘机作业、暴雨等误扰事件,给使用方带来困扰。
基于深度学习的模式识别方法已成功应用于诸多领域[9-12]。卷积神经网络算法作为深度学习领域的重要成员之一,因其强大的学习表征能力和优异的识别效果,被广泛应用于图像识别等领域[13-14]。对于振动信号,一维卷积神经网络无需预处理即可分类识别,实现原始信号端到端直接判别,在光纤振动信号模式识别领域有较大的应用前景[15-16]。
本文针对地下综合管廊安全防控需求,结合光纤传感技术和深度学习方法,设计研制了一种基于分布式光纤振动传感技术的地下管廊入侵监测系统。系统采用分布式光纤马赫曾德尔-萨格纳克(Mach Zehnder-Sagnac,MZ-Sagnac)混合干涉结构,结合振动传递装置将井盖开关行为转化成对光缆的振动冲击,最后利用一维卷积神经网络算法对振动冲击信号做模式识别,通过监测井盖开关实现对地下管廊入侵行为监测的效果。
1 工作原理
1.1 光纤MZ-Sagnac 混合干涉结构原理
光纤MZ-Sagnac 混合干涉结构如图1 所示,由超辐射发光二极管(Super-Luminescent Diodes,SLD)、3×3 耦合器、2×2 耦合器、光纤延时线圈、振动传感光缆、法拉第旋转镜(Faraday Rotating Mirror,FRM)、光电探测器和数据采集与信号处理系统构成。

图1 光纤MZ-Sagnac 混合干涉结构示意图
超辐射发光二极管作为宽谱激光光源,发出的光束在该光路结构中存在多条光程,其中主要的光程有以下四条:
由于宽谱光源具有低相干长度的特点,四条光程中只有光程2 和光程3 的光程相近,可以发生干涉。当无外界扰动作用于传感光缆时,光程2 和光程3 的相位差恒定;当有扰动作用于传感光缆时,由于光弹效应[17],扰动使得光程2 和光程3 产生相位差Δφ(t),探测器接收到的两路信号可以表示为:
式中:x(t)、y(t)是PIN 1 和PIN 2 接收到的两路信号;Ia、Ib、Ic、Id是由系统光功率、线路衰减、3×3 耦合器分光比等决定的常量;α、β是由3×3 耦合器决定的初始相位;Δφ(t)是由外界扰动引起的光程2 和光程3 的相位差,可利用相位还原算法求解[18-19]。
假设扰动发生于图2 的P点,其对于传输光的相位调制作用是φ(t),则光程2 和光程3 产生的相位差信号为:

图2 扰动源的位置
式中:φ2(t)、φ3(t)分别表示光程2、光程3 受到扰动后的相位;τ为光经过延时线圈所需要的时间;n为光纤的有效折射率;c为光的传播速度;L为扰动点距离末端的距离。
进一步地,令:
式中:τd表示光来回经过L所需的时间。
结合式(3)和式(4),式(2)相位差信号可进一步改写为:
基于式(5)的时域特征,对相位差信号进行自相关运算[20]求得τd,即可求得扰动发生的位置L,计算公式如下:
因此通过该光纤MZ-Sagnac 混合干涉结构,可以采集外界扰动信号并进行扰动定位。
1.2 井盖振动传递装置
为通过光纤MZ-Sagnac 混合干涉结构获取井盖开关的振动信号,设计了井盖振动传递装置,示意图见图3。装置底端固定光缆,装置中间包含磁铁,井盖边缘安装铁片。当井盖被打开时,装置中的磁铁与井盖下的铁片分离,掉落至装置底端与光缆碰撞产生冲击信号;当井盖关闭时,底部磁铁由于铁片吸引力往上吸,吸住瞬间产生的振动信号通过装置传递给探测光缆。

图3 振动传递装置示意图
该装置将井盖开关行为转化成对光缆的振动冲击,可以实现监控井盖开关的目的。然而由于井盖与光缆之间通过装置形成固态连接,其他扰动信号易被放大,当车辆驶过、暴雨等扰动作用于井盖时,也会产生告警信号。
针对上述误报问题,系统后端增加振动信号模式识别算法判断振动信号类型,并根据振动信号的类型决定是否发送告警信号。图4 展示了开井盖时磁铁与光缆碰撞产生的瞬态冲击信号的时域和频域特征。时域图表明碰撞的瞬间信号幅度较大,随后信号幅度逐渐减小,功率谱图揭示该信号的频带较宽,覆盖0~2 000 Hz。

图4 开井盖信号的时域图和功率谱图
根据信号时频域特点以及现场所需的高精度要求,决定使用一维卷积神经网络(1D-Convolutional Neural Networks,1D-CNN)算法作为后端模式识别模块。
1.3 一维卷积神经网络基本原理
一维卷积神经网络通常由一个输入层、若干隐含层和一个输出层组成[21-22],其中隐含层包括若干个卷积层、池化层和一个全连接层,示意图见图5。

图5 一维卷积神经网络基本原理示意图
卷积层主要由多个卷积核构成。一个卷积核可被看作是一个感受野,以一定的步长与局部数据进行运算,其运算原理为:
式中:a为卷积核在x方向上的宽度;F为卷积核参数向量;G为与卷积核函数运算的局部向量矩阵;w为卷积核的尺寸。
池化层对卷积得到的特征进行最大池化或平均池化等操作,从而大幅减少卷积层的空间维度,降低计算成本。
经过若干次卷积和池化操作,全连接层将1DCNN 网络中多层卷积和池化后的特征铺平为一维向量,映射到下一层。
输出层采用Softmax 函数。该函数的输出结果代表其对应类别的概率,因此输出矢量的最大值对应的目标类别即为最终的识别结果,数学公式可表述为:
式中:R为输出结果矩阵;k为类别个数;ωi和bi为第i个分类对应的权重和偏置矩阵。
一维卷积神经网络判别模型的建立步骤如下:①采集大量信号,将信号与其对应类别结合构建成数据集;②设计一维卷积神经网络结构并设置一维卷积神经网络参数、训练超参数;③将数据集输入网络进行训练,使用反向传播算法更新每层权重参数;④待迭代次数达到设定值则停止更新权重参数,保存参数得到判别模型;⑤将新的信号输入判别模型,得到判别结果。
该方法省去手动提取特征的过程,无需对原始数据进行预处理,将原始数据直接送入1D-CNN 网络进行识别,最终实现对光缆振动信号的分类。
2 实验
2.1 实验数据采集
系统搭建于实地管廊中,管廊长度约18.5 km,光缆铺设在管廊内。地下管廊每隔一定距离设有井盖,累计井盖636 个,每个井盖均安装振动传递装置,图6 所示是管廊现场。

图6 实验现场
系统切片采集扰动信号,经反复试验,40 ms 切片长度可以完整采集开关井盖的瞬时振动信号,故切片长度设置为40 ms。采集的信号包括人为开关井盖、车压过井盖、大卡车经过、暴雨袭击和人不断踩踏井盖等。其中人为开关井盖行为归为人为入侵行为,其他事件归为非人为入侵行为。本次实验用于训练神经网络模型的信号共1 161 条,其中入侵行为信号656 条,非人为入侵信号505 条。
由式(5)可知相位差信号与扰动位置有关,图7所示是不同类型振动信号去位置化前后的典型信号波形图对比。观察信号波形图可以发现,振动信号去位置化后与原始的信号在幅度和轮廓上均有区别,直接将包含位置信息的相位差信号送入模式识别算法进行训练将增加训练的难度,训练准确率下降。为使实验数据之间更加具有一致性,将采集到的信号进行去位置化处理再用于模式识别可降低训练的难度,增加识别准确度。该处理方法借鉴语音信号混响消除算法[23-24],可以消除位置干扰。

图7 振动信号去位置化前后的信号波形
2.2 1D-CNN 网络结构搭建
采集的实验数据去位置化之后,利用一维卷积神经网络进行模式识别。网络模型超参数的设计主要包括网络的深度,卷积核的大小与步长以及卷积核的数目。本实验搭建的1D-CNN 结构如图8所示。
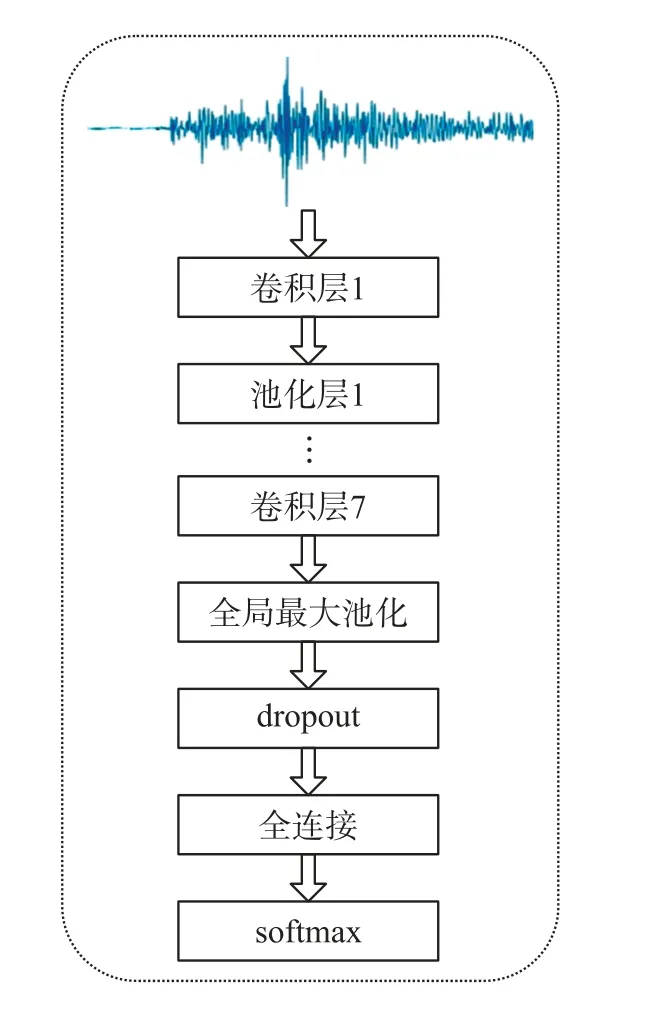
图8 本实验搭建的1D-CNN 结构
该1D-CNN 在第一个卷积层中采用48×1 的长卷积核以获得较大的感受野,达到提取低频信息的效果,使用ReLU 函数作为激活函数,采用最大池化过滤输入中的冗余信息。此外,为了防止过拟合,增强泛化效果,网络结构中还添加了50%丢弃率的dropout 层,并采用交叉熵损失函数作为模型优化的损失函数。Softmax 层有两个输出类别,对应人为入侵与非人为入侵两种状态。
2.3 1D-CNN 训练结果
将1161 条信号与对应的状态作为数据集,其中70%做训练集,30%做验证集。训练过程的超参数选择会影响模型性能,图9 所示是不同优化算法、迭代轮次、初始学习率对初始训练结果的影响。由图9 可知自适应矩估计(Adaptive Moment Estimation,Adam)优化器优化性能最好,其同时结合了随机梯度下降(Stochastic Gradient Descent with Momentum,SGDM)优化器的一阶动量和均方根传递(Root Mean Square Prop,RMSProp)优化器的二阶动量特点;理论上迭代次数越多准确度越高,但实际上过多的迭代次数会产生过拟合现象,选择迭代次数要合理;学习率是更新网络权重的超参数,表示每次参数更新的幅度大小。初始学习率过低或过高都会降低神经网络的性能,本实验选取10-3作为初始学习率,效果最佳。

图9 训练超参数对1D-CNN 初始训练结果影响
1D-CNN 初始训练结束后,为提高1D-CNN 最终判别性能,保存初始模型的映射函数,在该基础上再次训练。学习率从0.001 微调至0.002,迭代伦次从6 增加至18,间隔为1,mini-batch size 超参数从15 增加至40,间隔为5,当训练集与验证集准确度均是100%则保存模型为最佳模型用于后续的工程应用。图10 所示是最终训练结果的混淆矩阵,训练集和验证集预测结果均与真实标签相符。

图10 最终模型混淆矩阵
训练结束后,保存最佳模型用于工程应用验证,以测试模型的有效性和泛化能力。将几个月后采集的1 573 条新信号送入判别模型进行识别,判别的准确度为99.3%。除了识别准确度,识别速度也是深度学习算法的重要指标之一。经试验本算法判别一条信号所需时间约为0.07 s,满足实际应用的实时性要求。
3 总结与展望
针对地下综合管廊的安全防控需求,设计研制了一种基于分布式光纤振动传感技术的地下管廊入侵监测系统。系统采用分布式光纤马赫曾德尔-萨格纳克混合干涉结构,结合装置将井盖开关行为转化成对光缆的振动冲击,利用一维卷积神经网络算法对振动冲击信号做模式识别,通过监测井盖开关实现对地下管廊入侵行为监测的效果。经过现场后续的实地测试,该系统可以有效区分监测事件和干扰事件,识别准确率高于99%,判别实时性高。今后,将进一步丰富干扰信号的数据集,采集其他的干扰信号纳入训练,以提高判别模型的准确率。
