多点定位接收机的设计与实现
2024-01-22汤新民
汤新民,李 帅,周 杨
(1.南京航空航天大学民航学院,江苏 南京 211100;2.中国民航大学交通科学与工程学院,天津 300300)
随着机场和航空器数量的增加,机场场面监视问题变得越来越突出。目前,我国中小机场普遍缺乏有效的监视手段。传统的场面监视雷达价格昂贵、精度受限且部署困难,而多点定位系统具有对现有的二次雷达和广播式自动相关监视系统(automatic dependent surveillance-broadcast,ADSB)的应答机信号的兼容性,无需额外的设备即可实现[1];因此,作为新型监视技术,多点定位系统已经被世界上很多国家民航单位作为重点研究方向。经过多年的研究和更新迭代,许多公司都推出了相应的多点定位产品,如英国的Sensis 公司开发的多点无线监视系统,加拿大的Rannoch 公司开发的AirScene 系统等都开始在世界范围内的机场试用[2]。随着技术的更新成熟,国内外许多大型机场都开始装配多点定位系统,比如法兰克福机场、迪拜国际机场、希斯罗机场、韩国釜山机场等[3]。
多点定位系统接收不同位置的地面站信号到达时间(time of arrival,TOA),通过计算不同地面站与主站之间的TDOA,解算出飞机位置[4-5]。文献[6]提出使用GPS 作为参考时钟,实现异地时钟同步,但精度受限于GPS 时间同步误差,定位效果不能满足场面监视需求。Sattarzadeh 等[7]提出了一种多径衰落信道中精确估计到达时间的低成本方法,利用信道延迟分布的时域特性,减小多径和非视距情况下的TOA 测量误差。Galati 等[8]提出了以S 模式信号报头为判断条件,使用匹配滤波器计算信号到达时间的方法,有效地提高了检测的准确性,但是到达时间仍然受限于信噪比,无法满足多点定位系统的要求。在对多点定位的研究中,除了接收机测量精度之外,另外一个影响定位精度的重要因素就是求解多点定位方程的算法。程擎等[9]提出了一种改进的Taylor-Chan 算法,将Taylor 算法初值带入Chan 算法进行迭代,并验证了算法精度要高于Chan-Taylor 算法。孟天次等[10]提出了改进的最小二乘的多点定位算法。这些算法没有利用智能算法对TDOA 模型进行寻优,在精度和运算速率上无法达到最优。
总的来说,接收机测量精度和求解多点定位方程的算法是影响定位精度的两个重要因素。本文从提高接收机的测量精度出发,提出一种基于驯服时钟的分布式授时方法。针对多个远端站的高精度时间同步和信号检测的问题,结合现场可编程门阵列(field programmable gate array,FPGA)的特点提出了一种具有动态门限值的报头检测算法来获取ADS-B 信号的TDOA 信息,并验证精度后完成多点定位接收机的设计。
1 多点定位原理与定位算法
1.1 TOA 定位
TOA 定位主要是根据定位目标发送的信息到达各远端站的时间来定位目标位置。定位原理如图1 所示,每个远端站分布在不同位置,因此目标发送的信号到达各远端站的时间存在差异,利用到达时间的不同和电磁信号传播速度为确定值建立距离方程就能实现对目标位置的定位。

图1 TOA 定位原理Fig.1 TOA positioning principle
TOA 定位需要3 个及以上的定位远端站来对信号的到达时间进行测量。假设目标位置为T(x,y,z),远端站BS1位置为(x1,y1,z1),远端站BS2位置为(x2,y2,z2),远端站BS3位置为(x3,y3,z3),电磁信号在大气中的传播速度为c,目标信号到达第i个远端站的时间为ti,则定位方程如下:
解出上述方程即可得到目标T的位置 (x,y,z)。从上述分析及数学公式可知,影响定位效果的主要因素是时间的测量。TOA 定位使用的是同步时钟系统,如果时钟同步精度不够导致到达时间测量结果的误差达到微秒级别,那距离误差会达到上百米,从而影响定位的结果。
到达时间TOA 的计算:使用FPGA 将驯服时钟输出的方波时钟信号倍频成分布式授时系统的时钟信号,在检测报头信号的同时利用时钟信号进行计数。如果输入信号通过4 脉冲报头检测算法则表明接收到一组正确的ADS-B 信号。立即将当前计数器的值标记为当前信号的TOA 信息,并将结果上传到上位机,在上位机中分别计算每个接收站到主站之间的时间差值。
1.2 TDOA 定位
TDOA 定位算法是在TOA 定位算法的基础上进行改进,它不是直接利用目标信号的到达时间,而是利用相同信号到达不同远端站的时间差值来定位目标位置。相比TOA 算法需要信号到达远端站的精确时间,TDOA 算法需要的是相对时间的差值,所以在精度上有所提高,是目前应用最广泛的多点定位算法模型。TDOA 算法最少需要3 个远端站机来确定同一个目标的信号到达时间差,进而定位目标位置。根据定位需求的不同,可以分为二维空间双曲面和三维空间双曲面定位。TDOA定位的主要原理如图2 所示。
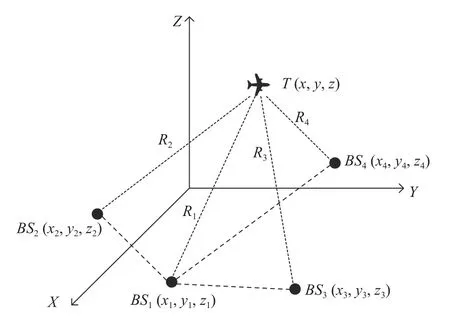
图2 TDOA 定位原理Fig.2 TOA positioning principle
在三维空间下,多点定位系统的远端站由1 个主站和至少3 个副站构成。假设各远端站的位置坐标为(xi,yi,zi),i=1,2,3,4,其中i=1表示主远端站,i=2,3,4表示3 个副远端站。目标位置为T(x,y,z),Ri,1表示目标到达主站与第i个副站之间的距离差,ti,1为目标信号到达主站与第i个副站之间的时间差,得到以下方程:
1.3 Taylor 级数展开法
本文使用Taylor级数展开法求解式(2)方程组。Taylor 算法需要给定一个初始的预测值,将预测值代入到公式中进行Taylor级数展开,忽略大于一阶的高阶项,然后开始迭代计算。Taylor 算法通过最小二乘法计算局部最优估计值,在每一次迭代过程中都对估计值进行更新,直到估计值和真实值的误差在设定误差阈值之内[11]。
假设定位目标初始位置的坐标为P0(x0,y0,z0),目标到达主站与第i个副站之间的距离差Ri,1可表示为
在预测目标位置P0处对式(3)进行Taylor 展开,可以得到
可以将上述表达式写成矩阵形式:
其中:
则式 ψ=H-Gδ的加权最小二乘解为
式中,Q为距离测量值的协方差矩阵,表示各基站之间时间测量的相对误差。
将式(7)求解后得到估计误差 δ=[∆x,∆y,∆z]T,代入到下次迭代之中,可以得到下一次的估计值:
在Taylor 算法中,需要设立一个误差阈值ε,重复以上计算过程,迭代到满足阈值门限要求:
从Taylor 算法求解的过程中可以看出,此方法的定位精度与目标位置的初始估计值有关。当初始估计值与实际值误差过大时,Taylor 算法的运算时间过长或者精度会下降,因此选择一个好的初始值对Taylor 算法十分重要。
2 分布式授时系统设计
2.1 分布式授时系统结构组成
分布式授时系统利用ADS-B 信号进行时钟同步。ADS-B 信号经过处理后进入接收站,接收站此时会标记信号的到达时间。为了保证时钟的同步,分布式授时系统以GPS 秒脉冲信号的恒温晶振作为参考时钟,实现高精度的同步,最终通过FPGA 开发板进行信号检测,将时间信息传输至上位机进行定位解算。分布式授时系统结构如图3 所示。

图3 分布式授时系统的结构组成Fig.3 Structural composition of distributed timing system
2.2 驯服时钟实现
通过结合本地恒温晶振与GPS 秒脉冲(pulse per second,PPS)信号,实现了一种高精度的时钟驯服方法。驯服时钟系统结构如图4 所示。
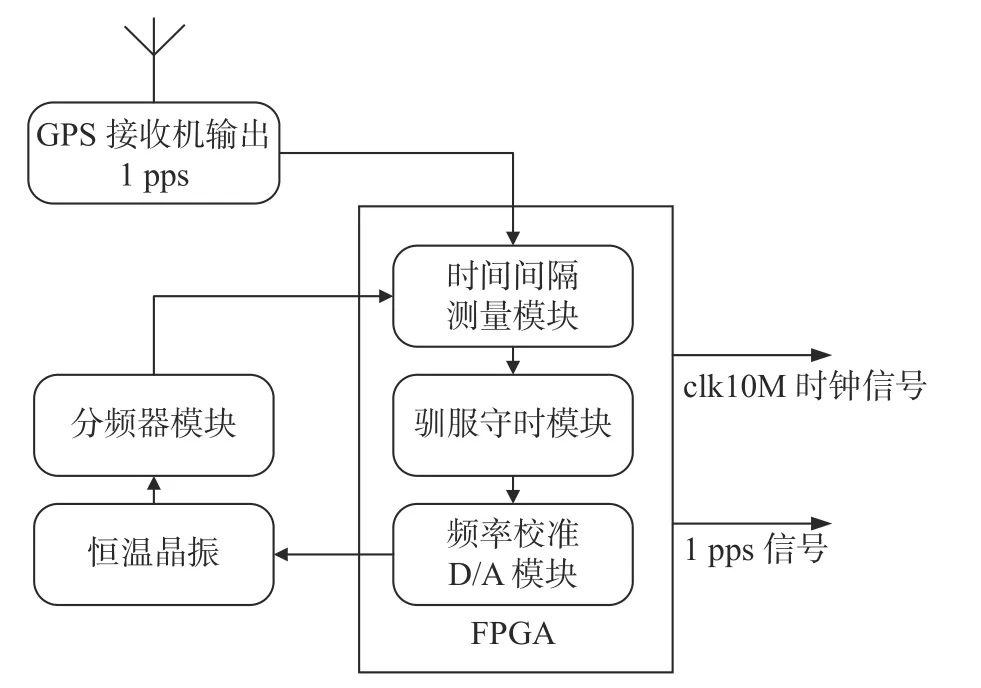
图4 驯服时钟的结构Fig.4 Structural composition of distributed timing system
总体设计包括以下几个模块,最终实现模块间的环路控制。
参考时间源。包括GPS 定位接收机和恒温晶振两个部分。GPS 接收机在接收卫星信号之后输出PPS 信号作为参考源,但是由于电离层、多径效应甚至卫星失锁时,GPS 的PPS 信号会发生抖动出现误差,所以需要对其进行滤波处理。而恒温晶振则稳定输出10 MHz 的信号作为本地时间源。
分频器模块。在接收到恒温晶振的10 MHz时间信号之后,将其分频处理为1 Hz 的信号。
时间间隔测量模块。在接收到GPS 接收机和恒温晶振输入的PPS 信号之后,对其进行间隔测量,采用高精度的检测方式对PPS 信号的上升沿或者下降沿进行相位检测,将检测结果输入到驯服守时模块处理。
驯服守时模块。分为驯服和守时两种模式。在相位差没有达到标准时进入驯服模式,对接收到的相位差结果进行滤波处理消除抖动,对滤波的结果使用PID 控制算法调整输出差值。当卫星失锁或者相位差结果过大时进入守时模式,在系统开始运行温度达到稳定之后,利用IIR 滤波器过滤老化和温度数据进行预测训练。
D/A 转换模块。接收驯服守时模块的数据,将数据转换成模拟电压并输出到恒温晶振的控制端,从而实现调整恒温晶振的频率输出。
3 ADS-B 信号前导脉冲检测
3.1 动态门限值计算
在目前有关ADS-B 接收系统的论文中,大部分都采用的固定门限值。固定门限值的缺点是在实际应用中如果信号功率有变化,可能会造成部分数据的丢失,因此本文采用动态门限值。求取动态门限值的过程如下。
1)在系统上电接收到信息之后,设置一个200采样点的寄存器噪声过渡带,并求出过渡带中采样点的平均值作为最小触发门限值MTL,并将最大和最小值分别设置为上下限值。
2)将噪声过渡带设置为右移寄存器,每次将新采样点与最小触发门限值作比较并计数。如果大于门限值则计数器加一,直到出现小于门限值的采样点。
3)将计数器值进行比较,如果计数器值大于22 则表明此时动态门限值设置过低,将动态门限值向上调整为上限值与门限值的中值,并更新上限值。若低于18 则表明动态门限值设置过高,将动态门限值向下调整为下限值与门限值的中值。重复调整直到计数器值在18~22 以内,输出此时的门限值。
动态门限算法流程如图5 所示。
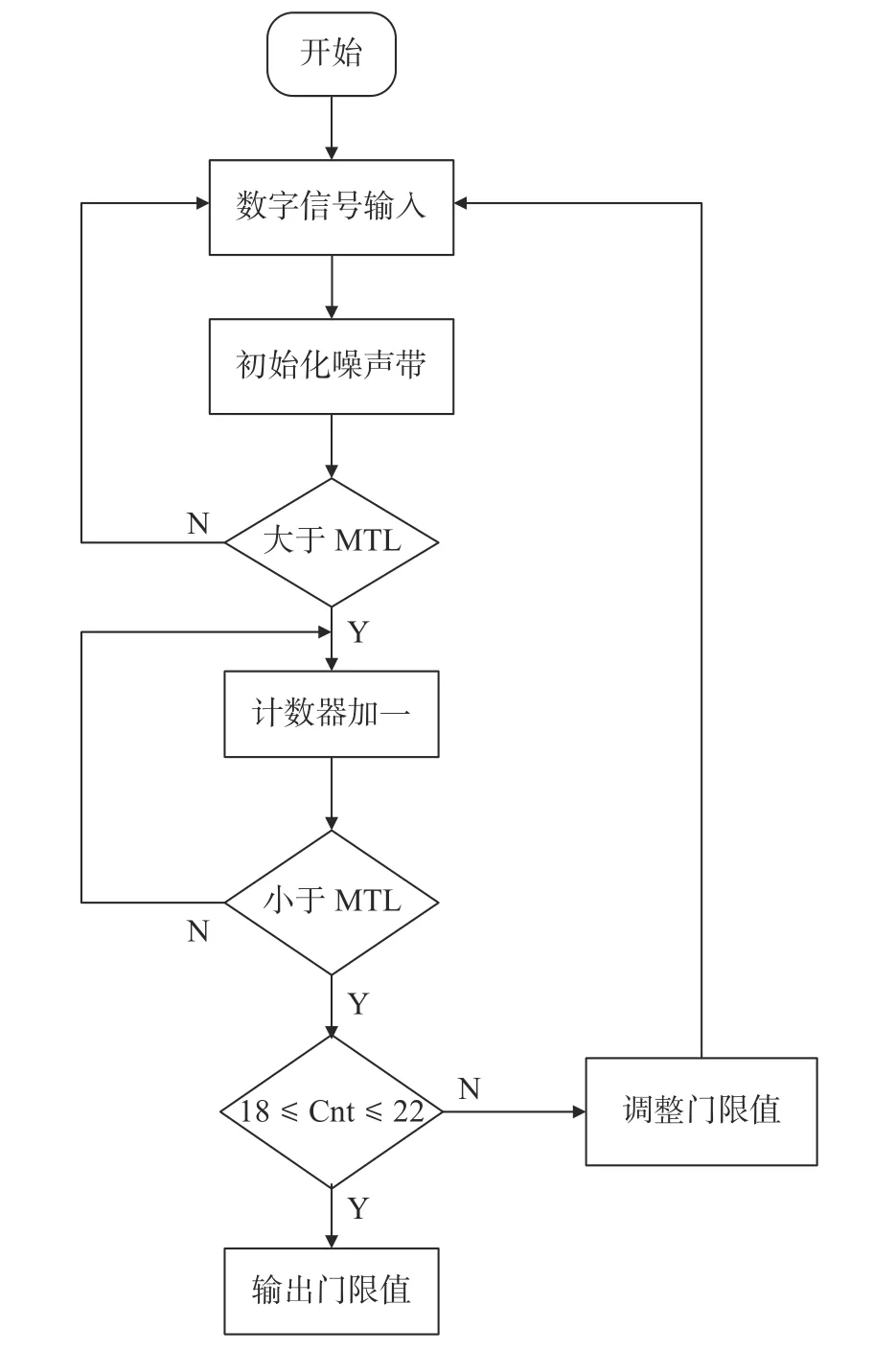
图5 动态门限算法流程Fig.5 Dynamic threshold algorithm process
3.2 有效脉冲检测与报头检测
接收到动态门限值之后进入脉冲检测阶段。根据报头检测需求,将在S 模式信号中提取每个比特位信号的上升沿位置标志和有效脉冲位置标志。假设使用40 MHz 时钟进行采样,一个脉冲持续时间超过0.3 μs,相当于持续12 个时钟周期。当前采样点的值大于门限值,并且在此采样点之后的12 个点中,每个点的值也大于门限值时可以判定脉冲为有效。
根据ADS-B 信号格式可知,ADS-B 信号每一个信息元包含120 bit 数据,其中前8 bit 为报头。报头脉冲都是出现在固定位置上的,每个脉冲时宽为0.5±0.05 μs,整个报头持续时间为8 μs,以第一个脉冲出现的位置为参照,第2、3、4 个脉冲分别出现在1.0、3.5、4.5 μs 处,其他时间没有脉冲出现。报头检测就是检测0、1.0、3.5、4.5 μs这4 个时序位置上的信号状态。为减少噪声过大对报头检测可能带来的影响,本设计对以上4 个时序位置的上升沿标志和有效脉冲标志分别做检测。在上升沿标志和有效脉冲标志都符合时序位置时,才判定这4 个脉冲是ADS-B 信号的报头。
3.3 信号到达时间计算
基于FPGA 特性设计一个48 位的计数器,当FPGA 开发板上电后自动开始计数,每接收到一个时钟信号则计数器加一。系统检测到一个报头信号就会发送标志位,当出现报头标志位,则使用寄存器寄存当前计数值。
4 多点定位接收机的验证与实现
4.1 仿真验证
在完成多点定位算法对目标位置的解算后,需要对结果的精度进行评估。目前,常用于衡量定位准确度的指标包括定位均方根误差(root mean square error,RMSE)和几何精确度衰减因子(geometric dilution of precision,GDOP)。本文主要对接收机的时间同步误差进行改进,因此选择使用RMSE作为误差分析的主要指标。
定位解均方根误差定义为
式中:(x,y)表示定位目标实际位置的二维坐标;表示经过算法定位解算后得出的目标位置坐标。RMSE 值越小,表示定位的精度越高。如果需要考虑三维定位情况,加上高度坐标z即可。
本文仿真采用星型布站设计,假设多点定位系统进行机场场面监视的区域为5 000 m×5 000 m 的方形区域。由于本文讨论的是场面监视,所以只考虑二维定位的情况。将TDOA 的测量距离误差设置成服从均值为0 的正态分布模型,标准差设置为100 m。以坐标(0,0)为主站坐标,从站坐标分别为(5 000,5 000),(-5 000,5 000),(0,-5 000)。在半径为5 000 m 的圆内随机选取1 000 个点作为目标位置,分别代入到算法中进行定位解算,其中Taylor 算法的初始位置同样为半径5 000 m 的圆内随机取点。仿真结果如图6 所示。
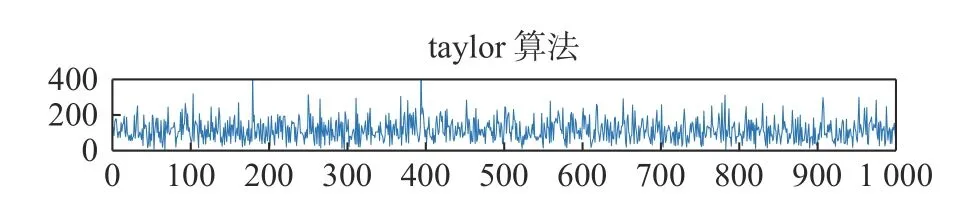
图6 Taylor 级数展开法定位均方根误差Fig.6 Positioning root mean square error of Taylor series expansion method
从图6 可以看出,当TDOA 测量误差的标准差在100 m 时,在4 个基站星型布局的情况下,Taylor算法1 000 次仿真平均均方根误差在117.893 1 m。使用本文提出的方法后,经过Taylor级数展开法解算的RMSE 明显减少。Taylor 级数展开法得到的目标位置精度较高,证明了本文设计的接收机的可行性。
4.2 接收机硬件实现
本文设计的接收机主要完成对ADS-B 信号的采集、解码和到达时间的计算。该设计要求对信号进行实时高精度的处理,同时要求硬件系统具有低功耗和高可靠性。在满足系统总体设计需求的情况下选用合适的FPGA 开发板,S 模式信号通过接收前端将信号解调还原成模拟信号,进入A/D转换模块,将模拟信号转换成数字信号送入FPGA开发板进行信号处理。同时,驯服时钟输出时间信号到FPGA 开发板接收机的系统总体时间。接收机的硬件结构如图7 所示。
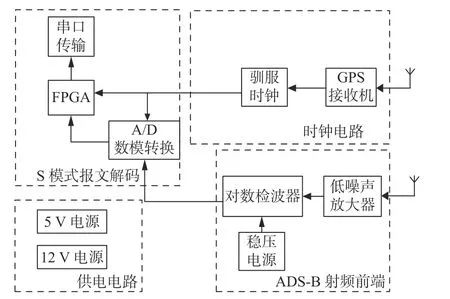
图7 硬件结构Fig.7 Hardware structure
分布式授时多点定位远端站实物如图8所示。
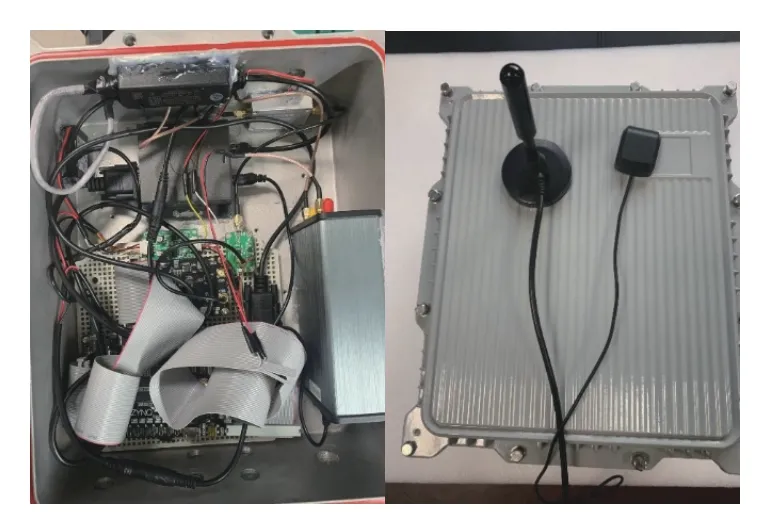
图8 分布式授时多点定位远端站实物Fig.8 Distributed timing multi-point positioning remote station physical object
4.3 软件平台实现
本文多点定位软件系统的数据来源是多点定位远端站,因此需要先开启远端站接收S 模式信号。当远端站接收信号并解码校验完成之后,将数据通过UART 串口或者UDP 广播的方式上传到上位机。在软件系统中可以选择想要接收数据的站点,选择之后接收该站点数据并解析,获得航空器的ICAO 地址、经纬度、到达时间、航向、速度等信息,将这些信息发送到显示模块根据不同的站点分配到不同的显示列表进行显示。同时,在不同站点数据中找到相同信号的到达时间值做差,将差值发送到多点定位计算模块,带入到TDOA 模型中,根据提出的改进算法计算出目标的坐标位置。在求解出目标的坐标位置后,还需要将空间坐标转换成经纬度坐标,将经纬度坐标输入到显示模块,在地图上找到相应的位置进行显示。多点定位软件系统的总体框架如图9 所示。
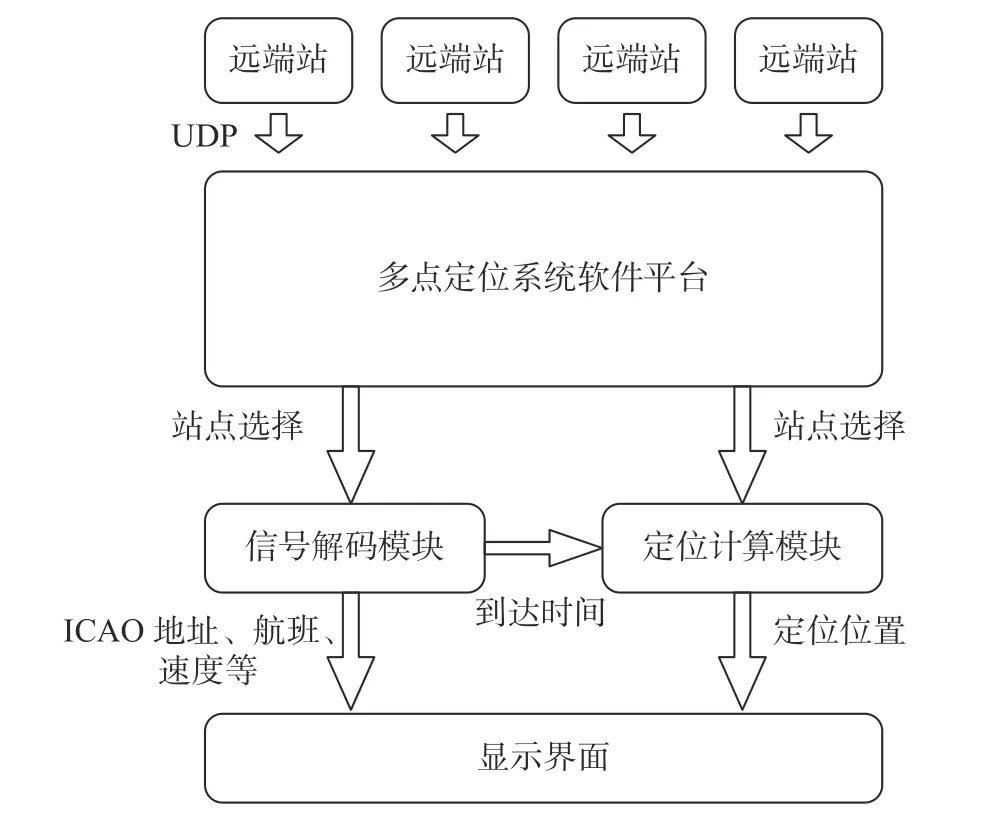
图9 多点定位软件系统总体框架Fig.9 Overall framework of multi-point positioning software system
多点定位系统软件主要是完成接收信息、多点定位计算、数据显示等功能。软件主界面如图10 所示。软件主界面包含显示主界面、站点选择、监视数据源属性栏等。其中,左上角窗口为选择站点,多点定位需要4 个及以上的定位远端站,此窗口可以根据需求选择需要接收数据的站点。左下角则是显示监视数据的属性来源,信号对应的远端站和消息类型等。右边则是显示主界面,所有信息都在此显示,可以根据需求选择定位目标显示、地面站参数、解码数据等。
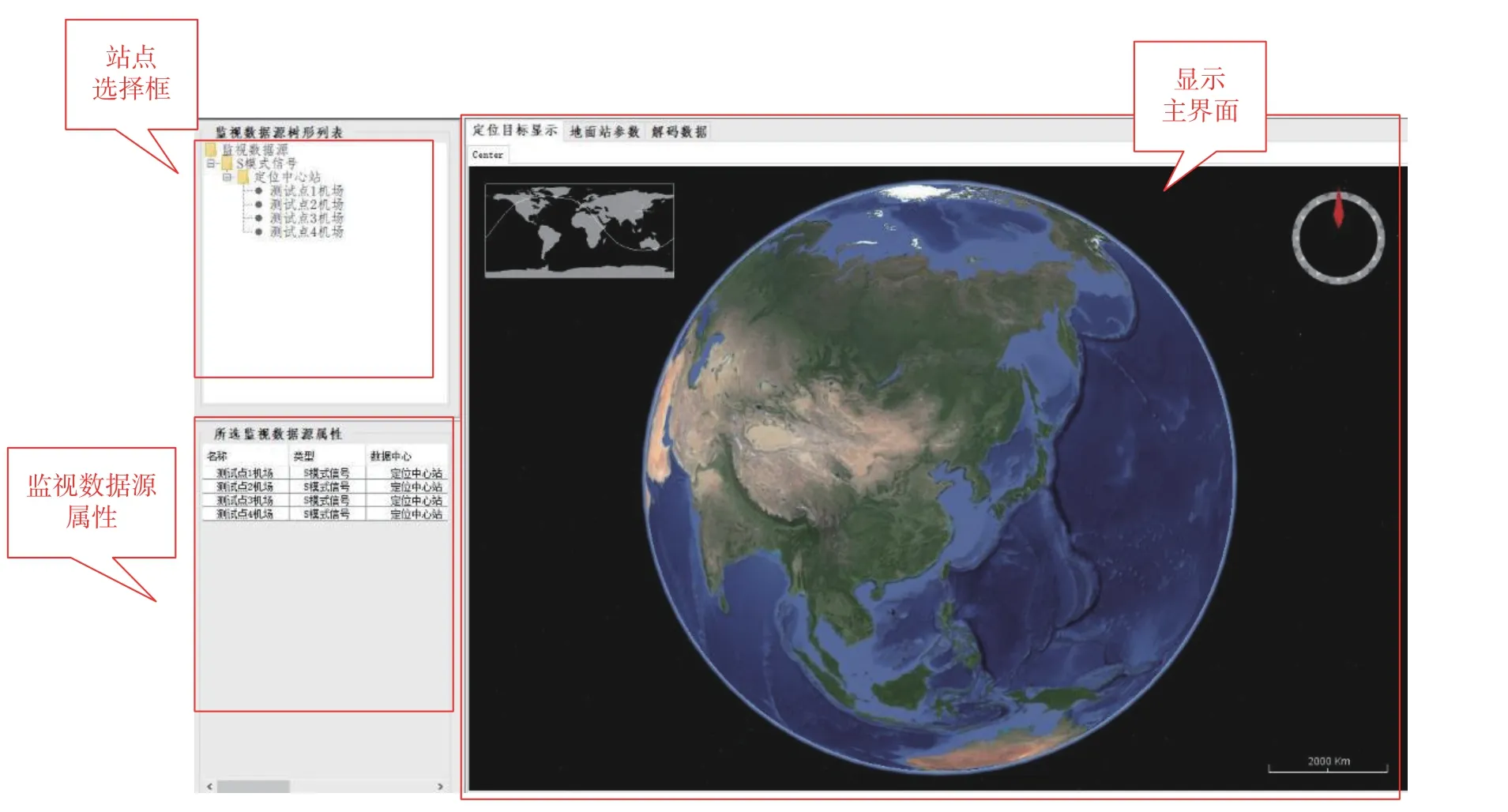
图10 软件主界面Fig.10 Software main interface
在接收数据的同时,软件在后台会进行解码操作,从报文中解析出目标航空器的ICAO 地址、国家、航班号、经纬度、高度、航向等信息,并按照格式显示出来。信号解码界面如图11 所示。
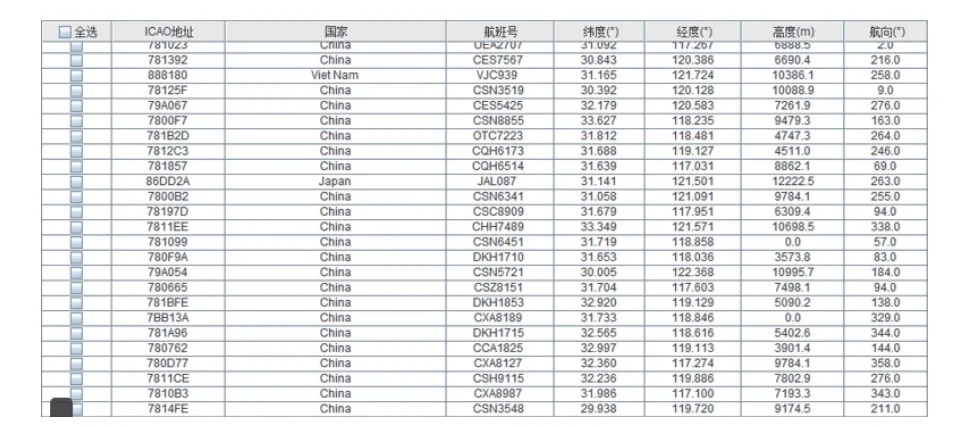
图11 信号解码界面Fig.11 Signal decoding interface
5 结论
本文提出了一种解决系统时间同步问题的方法,利用驯服时钟作为整个系统的参考时钟,同时保证了信号标记时间戳的准确性和稳定性。结合FPGA 开发板的特性,设计了一种用于提取ADSB 信号报头的算法,从而在高精度同步时间信号的基础上获取各信号间的TDOA,最终将结果发送至上位机进行定位解算并验证其有效性,仿真数据反映了定位的高精度,最后完成了硬件和软件的实现。在未来的研究中,可以对求解多点定位方程的算法进行改进,从而进一步提高接收机的精度。
