基于TTNT 数据链多址接入协议的多机协同任务调度方法
2024-01-22王瑞琳胡安敏
王瑞琳,何 锋,胡安敏
(北京航空航天大学电子信息工程学院,北京 100191)
随着作战理念和科学技术的不断发展,战争形态将演变为多机密切协同,陆、海、空、天四位一体,通信、控制、指挥相互融合渗透的立体化战争。无人机蜂群作战作为体系化全域战场的重要组成部分,其网络具有自组织、动态拓扑等特点。但无人机自组网高度的移动性和动态性[1],使得无人机之间的连接拓扑多变,对于协同任务的变化适应能力差,资源等信息共享能力有限,不符合多机协同通信的网络要求。媒体接入控制(medium access control,MAC)协议作为数据链技术的关键部分,决定资源分配和信道接入方式,对移动自组网整体性能起到至关重要的作用[2]。因此,如何基于数据链MAC 协议,设计一种实现资源融合、跨平台数据共享的无人机蜂群协同任务调度方法具有重要意义。
目前有关移动自组网MAC 协议技术的研究主要有TDMA[3,4]、动态TDMA[5]、轮询[6]、SPMA等。TDMA 协议采用固定分配时隙的方式,在节点入网、退网时,极易造成资源浪费。为此,Park等 [5]提出了一种基于时隙镜像的动态TDMA 方案,允许节点随机访问空闲的镜像时隙,但需中心节点对时隙资源进行控制,且时隙分配算法较为复杂。关于轮询协议,Ding 等 [6]为克服传统轮询协议无法优先传输紧急业务的问题,提出了一种多优先级轮询MAC 协议,实现了系统中用户对不同等级业务的传输需求,但也需提前规划好时隙和中心节点,无法较好地适应拓扑高速变化、任务传输时延要求高的无人机蜂群组网。
武协类数据链的战术瞄准网络技术(tactical targeting network technology,TTNT)代表着未来数据链发展方向,具有高速、低时延以及自动组网等特点,主要负责复合跟踪和协同作战等任务[7]。其MAC 层采用统计优先级多址接入(statistical priority-based multiple access,SPMA)协议,是一种无中心节点控制的随机接入协议,不需要提前划分时隙,有着更好的吞吐量和时延性能,适合在节点移动性强、拓扑快速变化的无人蜂群组网环境中使用。目前国内关于TTNT 的研究大多还停留在概念和理论研究阶段,少有实质性的验证试验。
因此,面向无人机蜂群组网协同环境,本文通过跨平台体系建模,构造分层分簇无人机蜂群模型和与之匹配的层次资源与任务调度模型,基于TTNT 数据链SPMA 协议,对模型的消息传输进行优化,以解决无人机蜂群中任务协同、信息交互和互连组网等关键性问题,提高无人机资源共享、协同作战的能力。
1 基于SPMA 协议的多机协同任务调度
1.1 无人机蜂群分层分簇自组织网络架构
结合未来航空电子领域通信环境,从保证任务系统实时性的角度出发,根据跨平台航电系统中节点分布广、密度不均、数量众多的特点[8],按照任务协同的需求,本文的无人机蜂群自组织网络架构主要按照分层分簇的思想进行设计,主要包括以中心控制器、簇首、普通无人机组成的3 层机外结构和以网络控制器为中心的机内架构。在3 层机外架构中:第1 层是内部服务器、存储器等资源间的通信网络——云端数据中心网络,负责初始使命的接收和下发;第2 层是一定区域内的无人簇群的簇首之间通过数据链通信并接入云端数据中心的网络——跨系统平台网络,负责将从云端接收到的使命拆分成单个任务并继续下发;第3 层是无人机内部以交换式组网为代表的有线通信网络——单系统平台网络,负责将簇首传输来的任务执行完成,如图1 所示。

图1 无人机蜂群分层分簇机间网络架构Fig.1 Layered clustering of UAV bee swarms inter-machine network architecture
由于软件定义网络(software defined network,SDN)技术的主要思想是将网络中底层设备的控制功能集中化,数据控制与转发平面相分离,以实现底层设备对上层应用的透明化[9],所以,在机内架构中,借鉴SDN 的控制与转发分离机制,对机内交换机和网络控制器进行功能划分,控制层主要由网络控制器组成,数据层则由交换机与端系统对应的交互信息组成。控制层控制无人机蜂群网络架构下资源的统一调度和任务分配,将数据承载层资源统一化,从全局上检测网络的资源容量、网络配置等信息,以集中化方式对全网进行动态控制,如图2 所示。

图2 无人机内部网络架构Fig.2 UAV internal network architecture
1.2 基于SPMA 协议的多层资源与任务调度模型
1.2.1 SPMA 模块与算法设计
由于每架无人机内的交换机连接了机内各节点,负责机内信息交互,并且前交换机与无线收发模块直接相连,负责本无人机与其他无人机或云端中心控制器进行信息交互,所以,本文设计的SPMA模块位于无人机内的各交换机结构中,以调控机内外各类消息的传输。SPMA 协议控制模块的示意图如图3 所示。
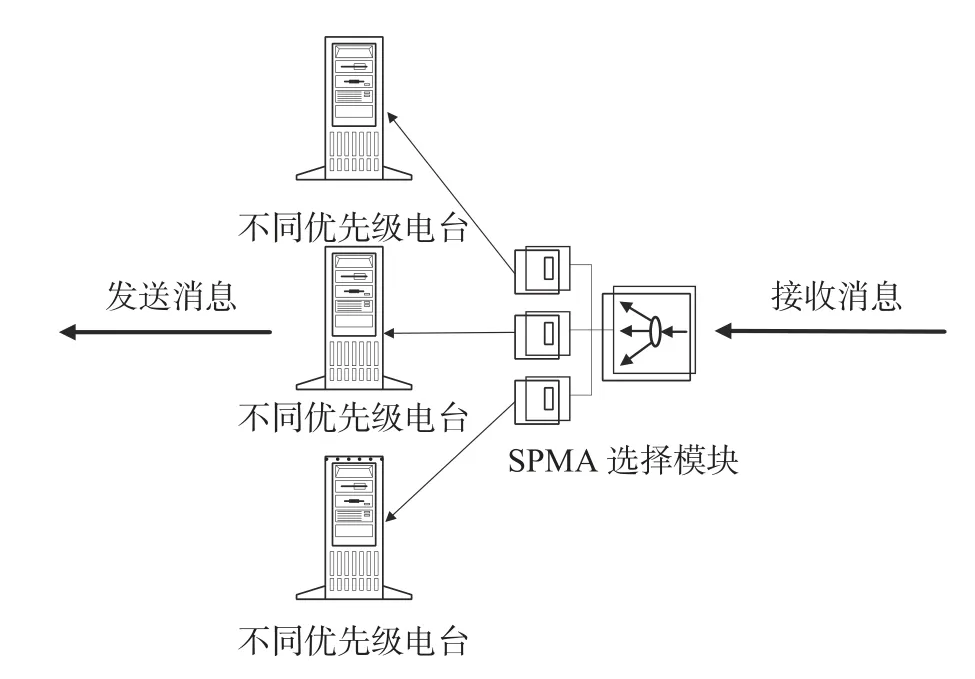
图3 SPMA 协议控制模块设计Fig.3 SPMA protocol control module design
在SPMA 协议控制模块的结构中,各子模块的功能如下。
1)消息接收端。向SPMA 模块中发送不同种类的消息,包括资源类消息、路由类消息和3 种功能不同的任务类消息。
2)SPMA 主体部分。将传输进来的消息按照消息类型和功能分成不同优先级,具体的优先级顺序从高到低分别为路由类消息、任务类消息、资源类消息,并将它们划分为不同优先级队列,结合当前信道占用情况,设定不同优先级的门限阈值,并且每到达一个数据包进行一次发送判定,比较当前信道占用统计值和优先级门限阈值大小,判定数据是否能够发送。
3)不同优先级电台。到达的数据包根据划分的不同优先级传输进入相应电台,当发送判定通过后将数据包直接发送,反之将数据包回退等待,直到下次发送判定通过。
根据SPMA 协议实现流程[10],模型中SPMA消息调度算法流程如图4 所示。按照优先级高的消息优先传输的原则,将传输到SPMA 协议控制模块的路由类消息、3 种任务类消息以及资源类消息划分为5 个消息优先级,并设定不同优先级消息的门限阈值,高优先级消息对应的门限阈值也高。消息到达时,根据其对应优先级进入相应电台,通过比较当前信道占用统计值和优先级门限阈值大小进行发送判定。如果阈值大于信道占用,则发送数据包,否则调用退避算法进行退避等待,直至更高优先级队列的消息全部发送完毕后退避结束,再次进行该消息的发送判定。
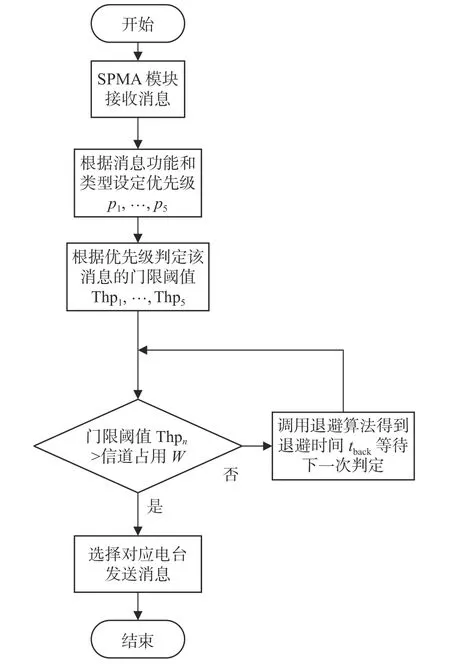
图4 SPMA 消息调度算法流程图Fig.4 SPMA message scheduling algorithm flowchart
1.2.2 多层资源与任务调度模型
多层资源与任务调度模型的工作流程主要分为2 部分:资源上报和任务分配。无人机蜂群资源上报与任务分配示意图如图5 所示。

图5 多层资源与任务调度示意图Fig.5 Multi-layer resource and task scheduling diagram
网络拓扑变化包含节点入网、退网。当节点入网时,为满足原任务的实时性,若任务所对应节点网络性能较差即资源不足,将原节点资源迁移到新的节点,若资源充足,则为新增节点分配新任务。当网络节点偏离系统平台,对应节点退网,并重新进行任务资源计算与原节点资源迁移。
1)资源上报。在每一次任务分配开始前,需要从底层对无人机蜂群分层分簇自组织网络架构中每层可用的任务资源进行统计,并将资源信息上报给上一层,层次关系结构如图6 所示。无人机内的不同端系统对应执行CPU(数据处理能力)、GPU(图形处理能力)、MEM(存储能力)、RAD(雷达探测能力)、ATT(攻击功能)、DIS(防御能力)等不同功能任务。普通无人机统计各端系统空闲任务资源,对应6 类任务虚拟资源池,并将每种资源池大小上报给所在簇群的簇首。簇首整合簇内所有无人机相同资源类型的空闲任务资源,建立无人机簇群虚拟资源池,并将每种资源池大小上报给云端对应类型的虚拟资源池,形成整个模型的任务资源排布。

图6 资源上报层次关系结构图Fig.6 Resource reporting hierarchical relationship structure diagram
其中,只有端系统的任务资源是实际的物理资源,最终的任务执行也落实在端系统上。在无人机、簇首和云端形成的资源池都是虚拟资源池。在构建虚拟模块资源到物理单位资源的虚拟化映射时,将虚拟网络映射过程抽象成一个M,分成节点映射和链路映射2 部分,按式(1)进行计算,为
式中:Gv为带有资源约束的虚拟网络请求;Gs为底层物理网络;Ps为网络中的一条无环路径;RN为分配给网络节点的资源;RL为分配给网络链路的资源。
2)任务分配。对应各层任务资源排布,建立从高到低分别为使命组、使命、任务和子任务的分层式任务调度模型。根据任务资源需求,在资源上报结束后依据遗传算法和贪心算法进行任务分配。任务分配包含机间任务分配与机内任务分配2 部分,流程图如图7 所示。
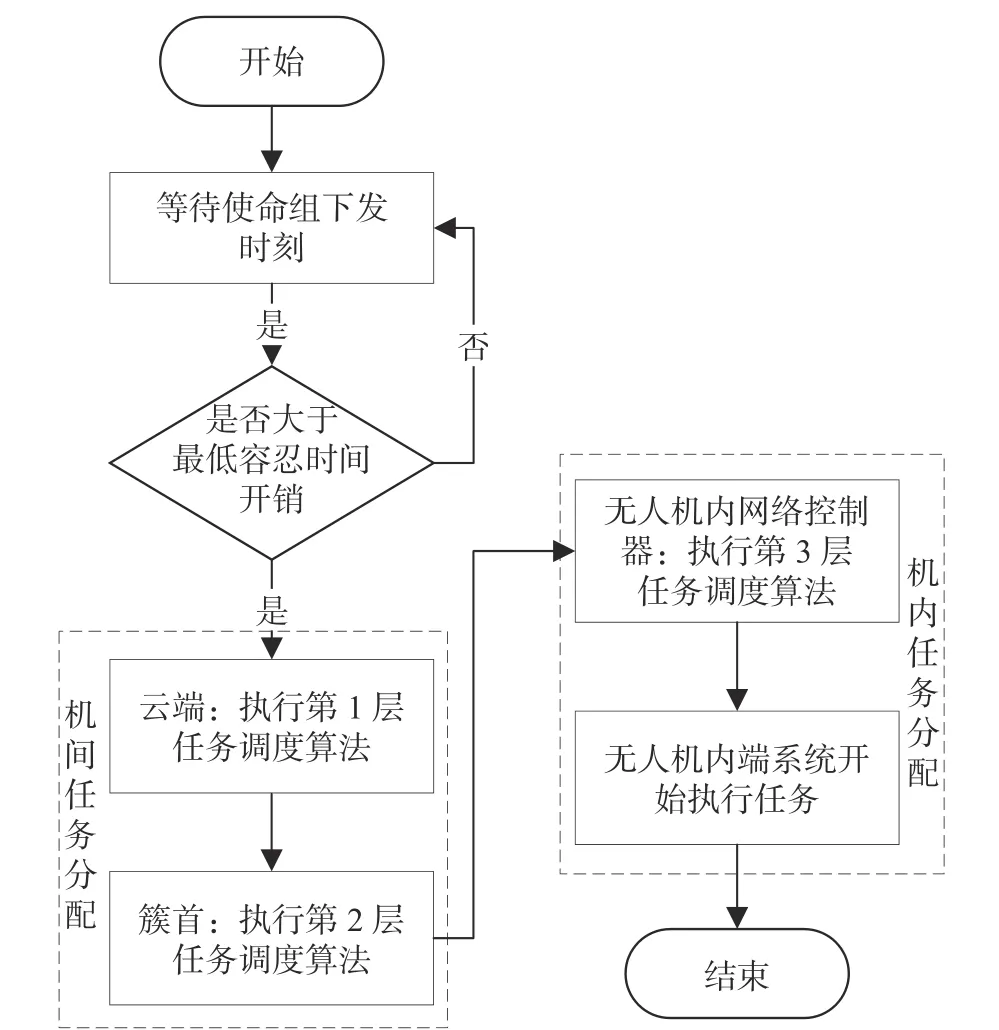
图7 任务分配流程图Fig.7 Task assignment flowchart
机间任务分配包括云端使命组分配和簇群内任务分配2 部分。采用原则是当一个节点足够执行任务时,优先将一个任务分配到一个节点完成,而当单节点无法满足任务的资源需求时,再考虑将任务拆分成多份交给多个节点完成。在使命组下发后,为防止无人机任务执行的实时性过差,当使命组下发时刻小于最低容忍时间开销时,表明无人机蜂群负载过大,资源不足,此时待分配的使命组需等待下次分配,直至使命组下发时刻大于最低容忍时间开销执行任务分配算法。首先,云端根据任务分配算法将接收到的使命下发给一个或多个无人机簇群的簇首,然后,簇首将下发的使命划分成不同任务,再根据任务分配算法下发给簇群内相应的无人机,最后,接收到任务的无人机会将任务细分为子任务,根据机内的任务分配算法下发给不同端系统执行。
在机内任务分配过程中,为使时间开销最少,进行子任务的均为资源数量最充足的端系统。即分配机内任务时,按照此时机内不同端系统对应的6 类任务虚拟资源池数量进行6 次排序,每次分配子任务时选择该子任务所需资源剩余量最大的端系统,直至该机内任务的资源需求被全部满足。
2 结果与分析
2.1 仿真实验设置
多机协同任务调度仿真实验是在OMNeT++仿真平台上实现的,通过NED 语言构建网络拓扑,进行节点连接关系与参数的默认设置,并通过omnetpp.ini 文件对节点数量、交换机数量、网络带宽等进行配置,对网络拓扑做进一步补充。
在仿真中,节点随机分布在1000 km×1000 km的空域场景内,采用参考点群体移动模型进行移动,并且为体现节点速度的差异性,速度从60~100 m/s 中随机选取。每一个无人机节点的仿真模型结构都相同,协议采用SPMA 协议与AODV 自组织网路由协议,其余参数设置如表1 所示。

表1 仿真参数设置Tab.1 Simulation parameter settings
为增强实验结果可信度并对实际无人机蜂群协同任务调度研究具有可参考性,本文以TTNT 数据链中无人机间平均距离在180 km(100 海里)与360 km(200 海里)时最大数据速率分别可达2 Mb/s与500 kb/s 作为技术指标,时延最高不超过2 ms 与6 ms 作为验证指标,进行模型性能测试和评估。
2.2 仿真结果分析
图8 示出在机间距离为180 km 时,引入SPMA协议前后动态拓扑下的节点端系统的网络吞吐量对比情况。通过模型端系统在一定时间内接收的数据包数量可知,引入SPMA 协议可以减少网络中的数据传输冲突,提高系统约18%的网络吞吐量。图9 示出不同传输距离模型端系统的网络吞吐量对比情况。可知,在SPMA协议中,平均传输距离远的系统网络吞吐量低。
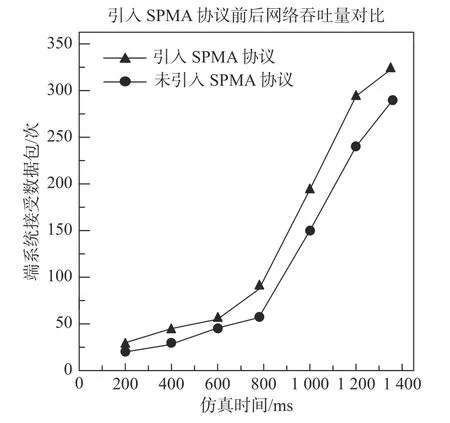
图8 引入SPMA 协议前后网络吞吐量对比Fig.8 Comparison of network throughput before and after the introduction of SPMA protocol
在10 s 仿真时间共计15 000 个调度事件下,重复进行3 次仿真实验,100 架无人机在不同传输距离时每个端系统的信息端到端平均传输时延的分布图(3 次仿真结果平均值)如图10 所示。可以看出:动态拓扑下的节点在机间平均距离为180 km时,84%的端系统消息端到端时延可以保持在2 ms以内;在距离为360 km 时,82%的端系统消息端到端时延可以保持在6 ms 以内。整网端系统平均时延如表2 中所示。可以看出:在机间平均距离为180 km 时平均时延能够维持在2 ms 左右;在距离为360 km 时能够维持在6 ms,满足SPMA 协议对于消息传输时延的要求。
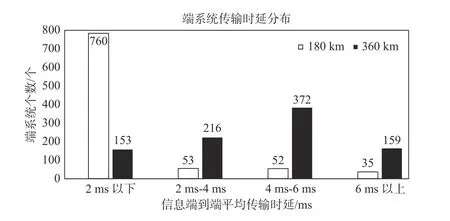
图10 端系统传输时延分布图Fig.10 Fig.10ransmission delay distribution diagram of the end system
3 结束语
面向无人机蜂群组网协同环境,本文基于TTNT 数据链SPMA 协议,设计了高动态变化拓扑下的无人机蜂群分层分簇自组织网络架构以及与之匹配的层次资源与任务调度模型,并以TTNT 数据链中的数据传输标准对信息端到端时延和网络吞吐量进行仿真验证。结果表明,该方法满足SPMA 协议对于消息传输时延的要求并且有效提高了无人机信息交互、资源共享和协同作战的能力。该方法具有算法部署简单、通用性强的优点,对实际无人机蜂群协同任务调度研究具有可参考性。
