基于数字孪生的机场场面滑行冲突预测模型构建与分析
2024-01-22黄智灵张璐瑶李晓欢
黄智灵,张璐瑶,陈 倩,3,唐 欣,3*,李晓欢,3
(1.天宇航空数据科技(合肥)有限责任公司,安徽 合肥 230000;2.广西高校智能网联与场景化系统重点实验室(桂林电子科技大学),广西 桂林 541004;3.广西综合交通大数据研究院,广西 南宁 530025)
随着机场交通流量的增加,航空器间剐蹭风险增大,场面冲突问题日益突出。目前,已有大量学者[1-5]对场面冲突问题进行了研究。Jiang 等[2]基于航空器优先级策略,以最短运行时间为目标,构建航空器的滑行模型。Zhang 等[3]将机场环境和场面冲突相结合,从滑行时间、污染物排放、燃油消耗等方面提出场面航空器滑行多目标优化方法。Wang 等[4]提出一种基于网络拓扑的机场场面滑行道冲突检测方法,通过地图匹配算法进行目标定位,根据目标拓扑关系进行滑行道冲突检测。Al-Shaibani 等[5]利用卫星图像作为数据集用于深度学习模型中飞机目标的识别,提出一种简单、低成本的机场交通管制方法。上述研究虽然在滑行冲突模型上提出了诸多新颖的研究思路,但并未考虑模型与场面状况交互时延等约束,难以满足实际场景的需求。数字孪生技术因为具有虚实融合的特征[6-8],为低时延场景下预测性能的提升带来了新的解决思路。
王红微等[9]构建了基于数字孪生的航班保障系统,对未来场面保障活动可能的风险进行预测,但该方法未研究具体预测方式。Wang 等[10]提出一种基于网络拓扑的机场场面滑行道冲突检测方法,根据目标拓扑关系进行滑行道冲突检测,但缺乏对航空器之间冲突时间的预测。Groshevg 等[11]通过构建机械臂孪生模型,分析不同无线技术连接对孪生系统时延的影响;但在机场场面系统中,由于机场通信计算的保密和可靠性要求通信框架和方式与常规网络存在差异,因此需要对面向机场场面系统的实际情况进行建模分析。
针对以上问题,本文提出一种基于数字孪生的机场场面滑行冲突预测模型。通过数据交互,使其准确反映航空器场面运行过程,主要用于场面滑行冲突检测相关工作,包括场面监控、冲突预测等。在此基础上,本文通过仿真分析物理端与孪生端的传输时延,验证该方案的可行性。
1 基于数字孪生机场场面滑行冲突预测模型的架构
借鉴数字孪生五维模型[12],构建了基于数字孪生的机场场面滑行冲突预测模型,如图1 所示。物理运行系统指航空器、场面环境、监视设备等组成的物理实体空间,是数字孪生模型中场面预警服务系统的基础。虚拟运行系统是物理运行系统在数字空间的映射,包括物理运行系统几何参数、属性、规则等。通过创建对应物理运行系统的完整孪生运行系统,保证虚拟运行系统能完整映射物理运行系统。孪生数据是数字孪生的驱动,包括物理运行系统数据、虚拟运行系统数据、场面预警服务系统数据、融合衍生数据等。场面预警服务系统是数字孪生模型的具体应用服务,指基于各类数据、算法等进行场面冲突预警功能服务。通信连接是数字孪生模型各组成部分互联互通的桥梁。机场场面各类数据通过无线网络传输至基站,基站与孪生系统通过有线网络连接。因此,物理系统与孪生系统之间的通信包括从机场场面到基站的无线链路和从基站到孪生系统的有线链路。
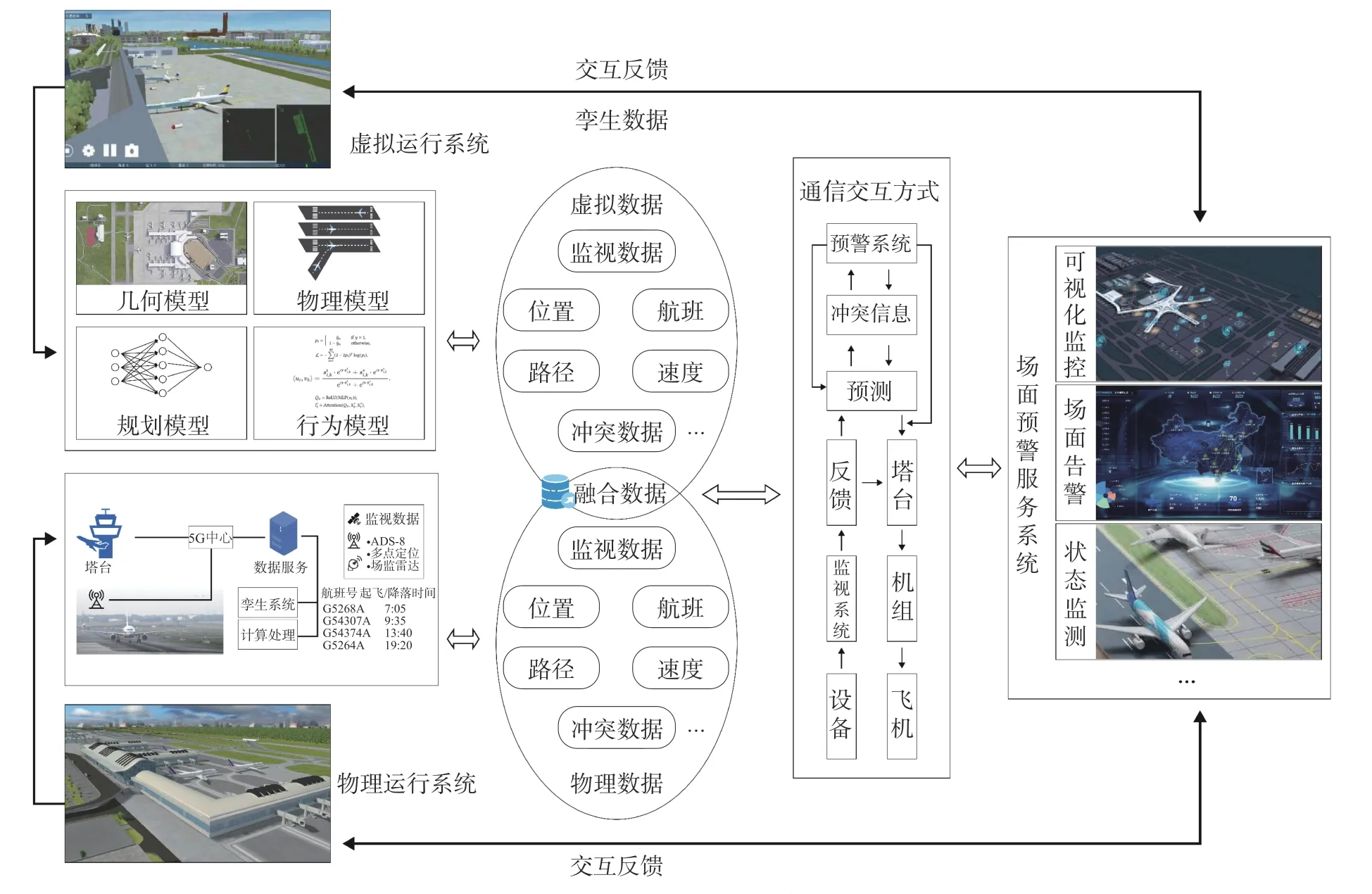
图1 基于数字孪生的机场场面滑行冲突预测模型架构Fig.1 The taxiing conflict prediction model in airport scene based on digital twin
2 冲突预测模型的构建
2.1 场景模拟
由于场面滑行冲突不是时刻发生的,因此首先需要构建机场场面冲突场景,场面常见的冲突类型有对头冲突、尾随冲突和穿越冲突,如图2 所示。对头冲突和尾随冲突常发生在直行道,穿越冲突常发生在交叉路口。图2 中的航空器的机头长度为L(图中L1 和L2 仅用于标识不同的航空器),场面飞行器的制动距离为B,安全冗余R,尾流影响W2,穿越冲突中航空器A2 到碰撞点的距离为d。
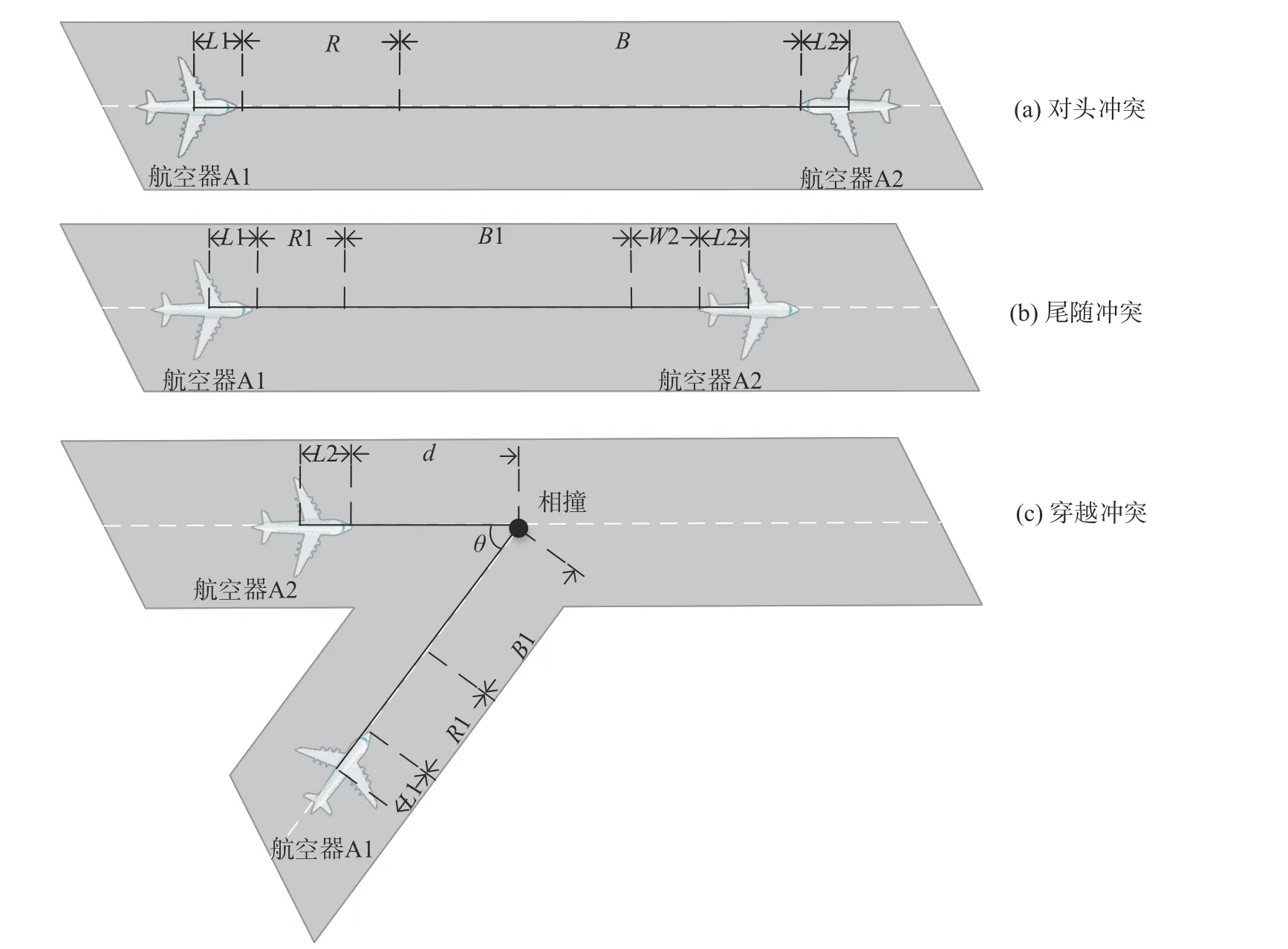
图2 经典冲突类型Fig.2 Classical conflict types
安全距离指航空器之间运行时的安全距离间隔。本文中的最小安全距离Ssafe指两航空器从发现冲突风险SR到采取制动措施后SB两航空器刚好不触碰的直线距离。因在确定航空器位置时为航空器质点位置,所以把航空器的机身长度L考虑到距离Ssafe中,因此在不同冲突场景中,航空器A1 和航空器A2 之间的安全距离Ssafe分别如式(1)、式(2)、式(3)所示:
2.2 冲突预测模型的构建
在场面滑行冲突中,由于管制员遗忘场面航空器状态,或者机组不熟悉场面环境发生路径偏离等情况下,极易发生冲突事件。对航空器碰撞时间进行预测,保证足够的安全时间,一方面为管制及机组人员预留充足的反应时间和间隔距离,另一方面能够及时提醒相关人员对场面冲突进行管控。冲突预测模型主要通过当前时刻航空器距离和运行速度,预测可能发生碰撞的时间,并通过数据传输更新,更新冲突预测模型。
设航空器A1 和航空器A2 的位置分别为(x1,y1),(x2,y2),速度分别为(vx1,vy1),(vx2,vy2),两航空器的相对状态C可表示为:
其中:(x2-x1)、(y2-y1)分别表示A2 在x、y方向上相对于A1 的相对位置;(vx2-vx1)、(vy2-vy1)分别表示A2 在x、y方向上相对于A1 的相对速度。若C>0,则表明两航空器为远离状态,不会发生冲突;否则表明两航空器是接近状态,应进一步判断冲突风险。
航空器运行参数分解模型如图3 所示。
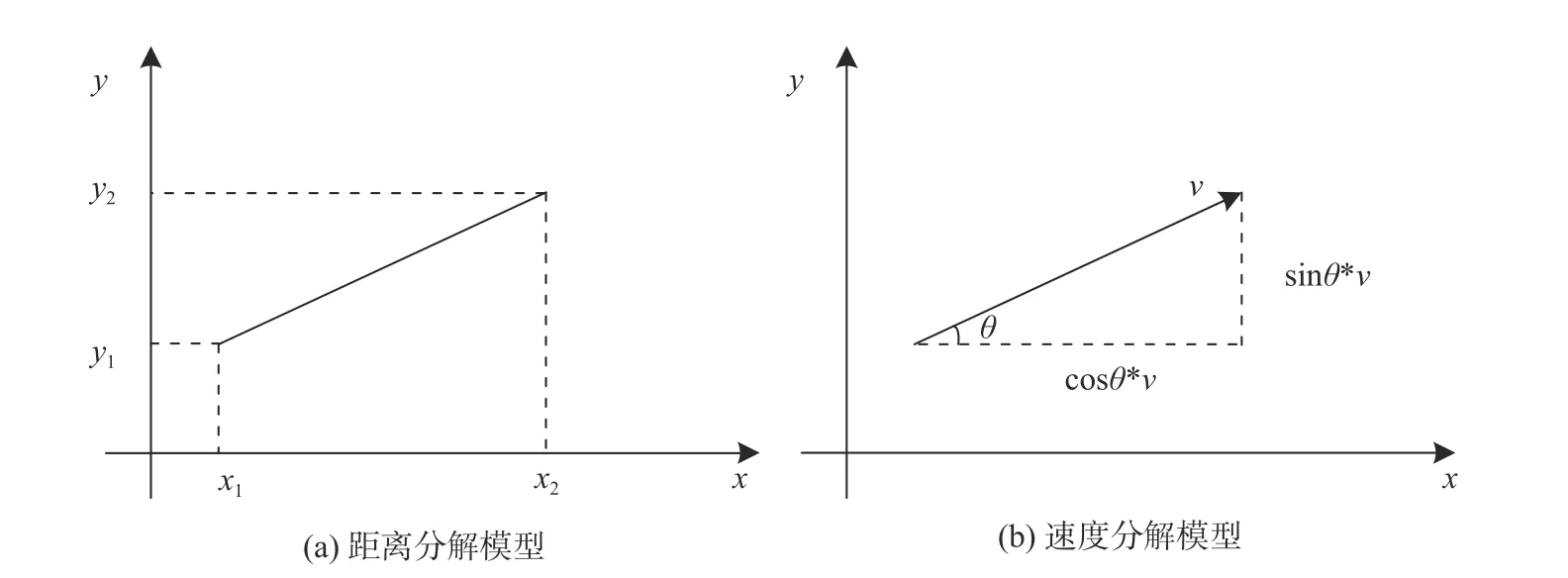
图3 分解模型Fig.3 Decompose models
航空器A1 和A2 之间的距离可分解为横向距离和纵向距离,距离表示如式(5)所示。
设两航空器运行夹角为θ,以A1 运行的方向为x轴正向,A1 和A2 的速度可分解为横向速度VX和纵向速度VY,速度表达如下:
以当前速度状态两航空器相距安全距离Ssafe时的预测时间
在对头冲突中,两航空器在同一路径行驶且方向相向,在滑行过程中,距离逐渐减小,存在对头冲突风险。其中,θ=180◦,∆V=V1+V2,那么Tsafe预测时间如式(10)所示。
在尾随冲突中,两航空器在同一路径行驶且方向相同,θ=0◦,∆V=V1-V2。若A1 速度大于A2 的速度,那么在滑行过程中,距离就会逐渐减小,存在尾随冲突风险。那么Tsafe预测时间如式(11)所示。
在穿越冲突中,A1 和A2 在不同路径行驶且方向相交,那么在滑行过程中,两航空器到达交叉口的距离就会逐渐减小,存在穿越冲突风险。那么Tsafe预测时间如式(12)所示。
3 孪生系统时延分析
在面向机场场面冲突的数字孪生模型中,计算处理包括监控和预测等,其可以分布在塔台或边缘服务器或云上。机场场面监视设备充当传感器进行数据采集,包括ADS-B(automatic dependent surveillance broadcast)系统、多点定位系统、场监雷达系统等。将基于数字孪生的预警系统进行通信建模,考虑不同的无线技术来提供机场场面到基站之间的连接。目前机场场面主流的通信方式主要有4G、5G 和AeroMACS。4G 和5G 是目前较为普遍的无线技术,而AeroMACS 是ICAO(international civil aviation organization)正式批准的机场场面宽带无线通信标准,为民航专用网络,可适用于机场航空器、机场地面交通以及其他近机场范围内场景的通信服务。
数字孪生系统的网络服务是通过顺序的通信方式和计算处理来描述的。每个计算需求由它们需要计算的任务集定义。计算处理将计算每个任务vt的时间关联起来,也就是说,dp(vt)定义了任务vt的处理时延。网络服务的总计算处理时延定义为
机场场面数据传输到基站的连接是通过无线技术w实现的,即4G、5G 和AeroMACS。每一个无线网络都有一个相关的传播时间 δw和一个偏差系数 βw≥1,w∈W。可靠性因子 γw≥1,w∈W,为可靠性技术(即重传)定义的时间成分。因此,每种无线技术的传播时延定义如下
其中,δw表示无线技术w的基线延迟。
最后,从基站到塔台或边缘或云的路径为一个固定有线链路T,消耗的传播时延为dt(t),其中,偏离系数βt≥1,t∈T。单位距离时延 δt≥1,t∈T,为传输单位距离所消耗的时间。因此,有线网络中的传播时延定义为
综上所述,物理系统与孪生系统之间的时延定义为
其中u(w,Gs)∈{0,1}表示Gs是否使用无线技术w。在本文中定义每个网络服务Gsu(w,Gs)=1,也就是说,在无线链路中假设使用单一的无线技术。
4 仿真实验
4.1 孪生模型冲突预测仿真
按机场运行规定,航空器的滑行速度不得超过50 km/h,约14 m/s,即航空器滑行速度V1和V2在0~14 m/s 之间。以空中客车A330-300 机型为例。在对头冲突中,航空器A1 和A2 相距1 000 m,均以10 m/s 匀速相向运动;在尾随冲突中,航空器A1、A2 相距400 m,A1 以13 m/s,A2 以5 m/s 匀速运动;在穿越冲突中,A1 以10 m/s 匀速在直行道上滑行,A2 在相距A1 横向距离400 m,纵向距离300 m 的位置以8 m/s 从交叉路口汇入直行道。航空器A1 和A2 相对路径距离和安全时间预测仿真如图4 所示。
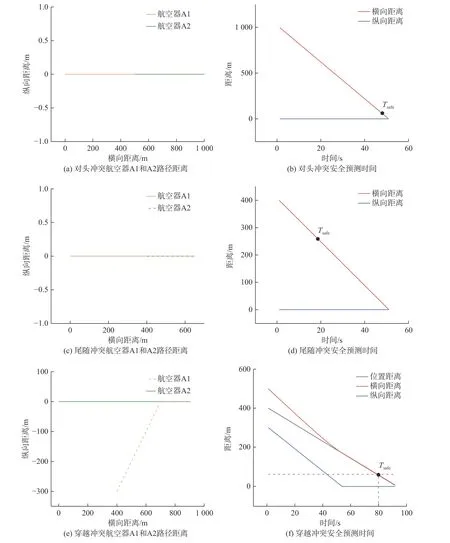
图4 安全时间预测Fig.4 Safety time prediction
通过算例进行仿真,图4(a)、图4(b)为对头冲突路径距离图和安全时间预测图,图4(c)、图4(d)为尾随冲突路径距离图和安全时间预测图,图4(e)、图4(f)为穿越冲突路径距离图和安全时间预测图。由图4 可知,该模型能预测各冲突类型中航空器到达最小安全距离的时间,对冲突风险进行预判,具有良好的可预测性。
4.2 孪生模型通信时延仿真
表1 中给出了参数的理论模拟值。
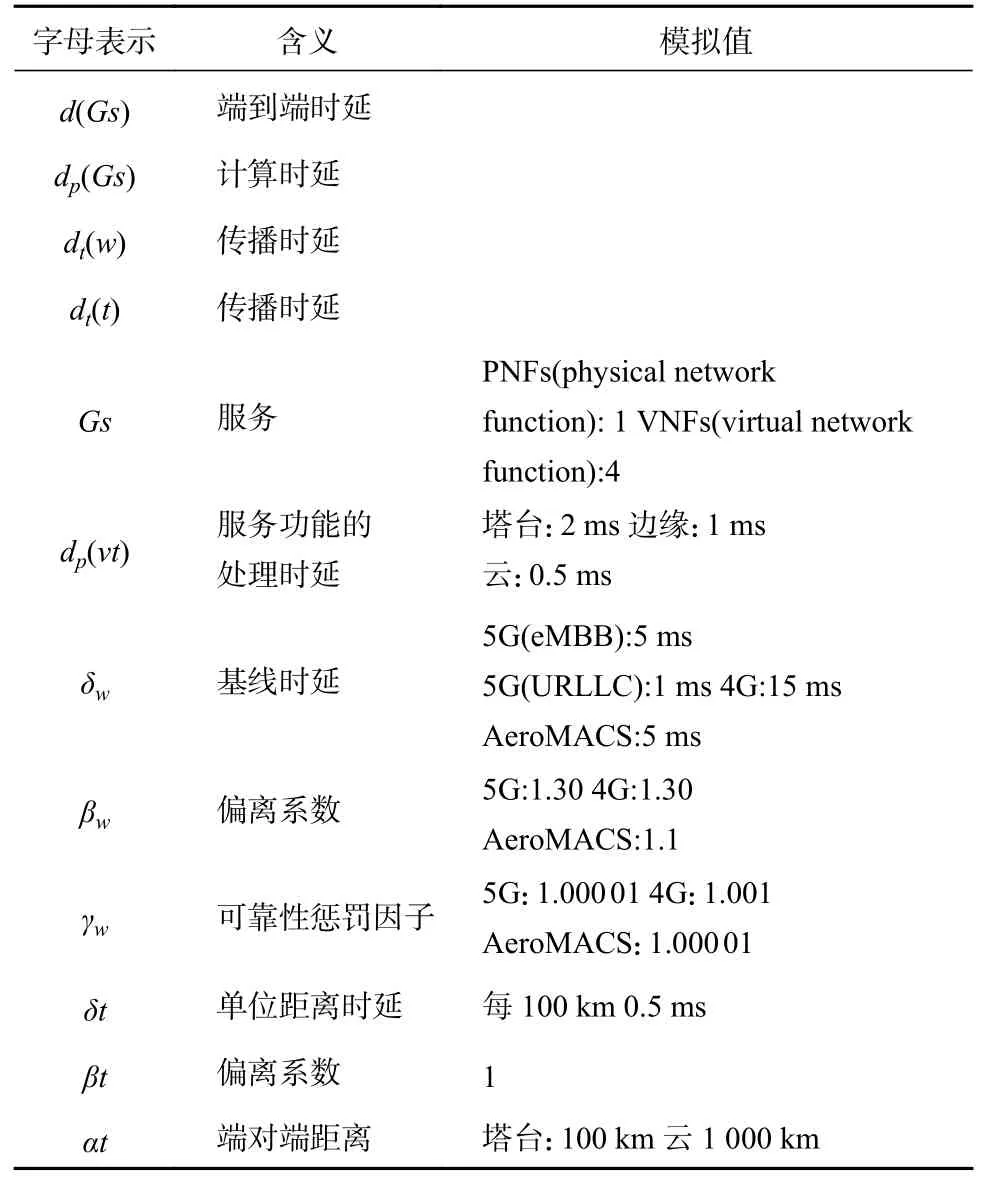
表1 参数含义及模拟值Tab.1 The meaning of the parameters and simulated values
上述模型物理端到孪生端的时延结果如图5所示,其形式为累积分布函数(CDF),在通信时延上考虑了参数的理论值,给出了不同部署配置的结果。由于场面冲突时延的需求尚未见专门的研究并给出一致的结果,本文在时延要求上采用文献[10]给出的机械控制场景下的典型时延0.5~20 ms 作为参考基准。
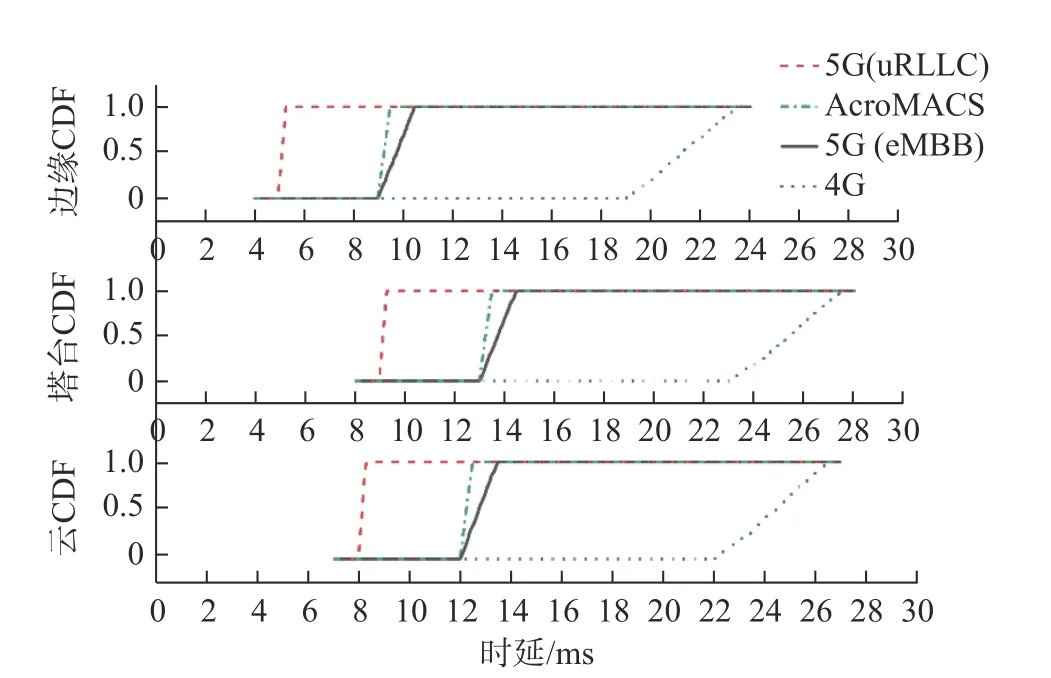
图5 不同部署时延Fig.5 Different deployment delays
由图5 可知,在不同的部署配置方案中,AeroMACS 和5G 均处于0.5~20 ms 时延区间,4G 时延大多在20 ms 以上;时延由小到大依次为5G(uRLLC)、AeroMACS、5G(eMBB)、4G;边缘端时延最小,塔台端和云端时延影响差距不大。
在无线技术方面:AeroMACS 和5G 都能够满足时延0.5~20 ms 的要求,4G 无法满足时延方面的最低要求;5G(uRLLC)是时延最短的无线技术,AeroMACS 和5G(eMBB)次之;由于AeroMACS是民航专用网络,安全可靠性更高,因此,在满足时延条件且综合考虑安全性的情况下,AeroMACS 是最佳选择。
在计算处理方面:将计算处理放在边缘可以改善延迟,因为边缘计算速度比塔台更快;将计算处理放在云端可以进一步提高计算速度,但是到达云端的距离越远,所产生的传输时延就越大,计算处理优势得不到明显的体现。特别的,以上分析均基于各通信方式的典型值计算,实际部署过程由于机场电磁环境等因素可能会存在差异。
5 结论
本文提出了一种基于数字孪生的机场场面滑行冲突预测模型,分析了孪生模型架构,设计了场面航空器冲突风险预测方法。通过物理系统与孪生系统交互,使其准确反映航空器场面运行状态。针对4G、5G 和AeroMACS 无线技术在孪生模型中时延的影响,对不同无线技术的时延影响进行了仿真实验,得出在满足时延条件且综合考虑安全性的情况下,AeroMACS 网络是最佳选择。在后续的研究中,计划接入实际机场场面航空器状态数据,进行场面冲突预测分析;进一步对数字孪生模型传输时延研究,分析理论时延与实际时延的差距,研究时延对孪生模型同步率的影响。
