远海风电DRU-HVDC 送出系统构网控制与启动方法综述
2024-01-18俞露杰付子玉朱介北彭国平赵成勇
俞露杰,付子玉,朱介北,李 瑞,彭国平,赵成勇
(1.智能电网教育部重点实验室(天津大学),天津市 300072;2.哈尔滨工业大学电气工程及自动化学院,黑龙江省哈尔滨市 150001;3.广东安朴电力技术有限公司,广东省中山市 528437;4.新能源电力系统国家重点实验室(华北电力大学),北京市 102206)
0 引言
海上风电由于风速更为稳定、空间更加开阔以及对环境影响更小,正经历快速发展[1-2]。随着海上风电开发的不断规模化与远海化,如何将其经济可靠送出已成为一个极具现实意义的问题。目前工程上的远海风电送出方式主要采用基于模块化多电平换流器的高压直流(modular multilevel converter based high voltage direct current,MMC-HVDC)输电,如德国DolWin1 和中国如东直流工程等。然而,远海风电经柔性直流送出在恶劣的海上环境下仍面临诸多挑战[3-4]:1)海上换流器体积大、重量沉,使得海上平台建设困难;2)海上换流器拓扑结构和控制复杂,维护成本相对较高;3)投资成本高。
为了提高远海风电直流送出的经济性和可靠性,工业界提出了二极管整流单元(diode-rectifierunit,DRU)型高压直流(HVDC)送出[5]。相比于柔性直流送出,DRU-HVDC 送出方案具有降低80%海上换流站体积、65%平台承重要求以及30%总投资成本的潜力[6]。但是,海上风电经DRU-HVDC送出系统存在以下两个显著特点:1)由于DRU 的不可控特性,其无法像模块化多电平换流器(MMC)那样构建海上电网,构网任务须由海上风电机组通过自身控制实现[7];2)由于DRU 的单向潮流特性,岸上电网功率难以通过HVDC 反送至海上风电场并为其提供启动能量。因此,DRU-HVDC 送出系统对海上电网(尤其是风电机组)的运行能力提出了更高的要求。目前,国内外针对海上风电机组构网控制与启动方法这两方面进行了相关研究并取得了一定成果,通过仿真及硬件在环实验验证了系统的运行可操作性,但缺少细致、体系化的梳理和总结。
为此,本文首先分析了DRU-HVDC 送出系统的特点,对比了海上风电经DRU-HVDC 送出和柔性直流送出、传统直流送出的差异。其次,针对DRU 的不可控特点,重点综述了海上风电机组集中式全构网型控制、分散式全构网型控制以及分散式半构网型控制,对全构网型控制采用P-V和Q-f功率控制机理进行了梳理解释。然后,针对 DRU 的单向潮流特性为系统启动带来的技术挑战,综述了辅助中压交流脐带电缆、辅助 MMC、海上风电机组配置储能以及辅助低压直流电缆等启动方案,指出使用辅助中压交流脐带电缆的方案相对成熟,而海上风电机组采用全构网控制并配置储能的方案,具有较高的灵活性,但现有技术下仍面临风电机组塔筒内部安装空间不足、储能安全隐患等挑战。最后,展望了DRU-HVDC 系统未来值得深入探索的研究方向。
1 DRU-HVDC 送出系统拓扑结构与特点
海上风电经DRU-HVDC 送出系统的结构如图1 所示。海上风电机组将产生的电能经汇集系统(66 kV)输送至分布式DRU,经分布式DRU 整流后通过高压直流电缆输送至岸上,逆变后并入岸上主网。
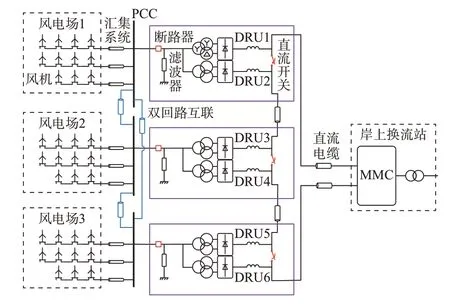
图1 海上风电经DRU-HVDC 送出拓扑结构Fig.1 Topology of offshore wind power transmission via DRU-HVDC
海上风电经DRU-HVDC 送出系统主要具有以下特点:
1)海上整流器采用6 个直流侧串联、交流侧并联的DRU,每个DRU 均为一个12 脉动的二极管整流桥,DRU 交流侧变压器采用星形-星形和星形-三角形连接方式来减小特征谐波。DRU 两两安装在3 个不同的分布式海上平台(对应于柔性直流送出的海上升压站平台,详见图2),该布置方式避免了大型集中式海上换流平台的建设[8],有效降低了系统的投资成本。
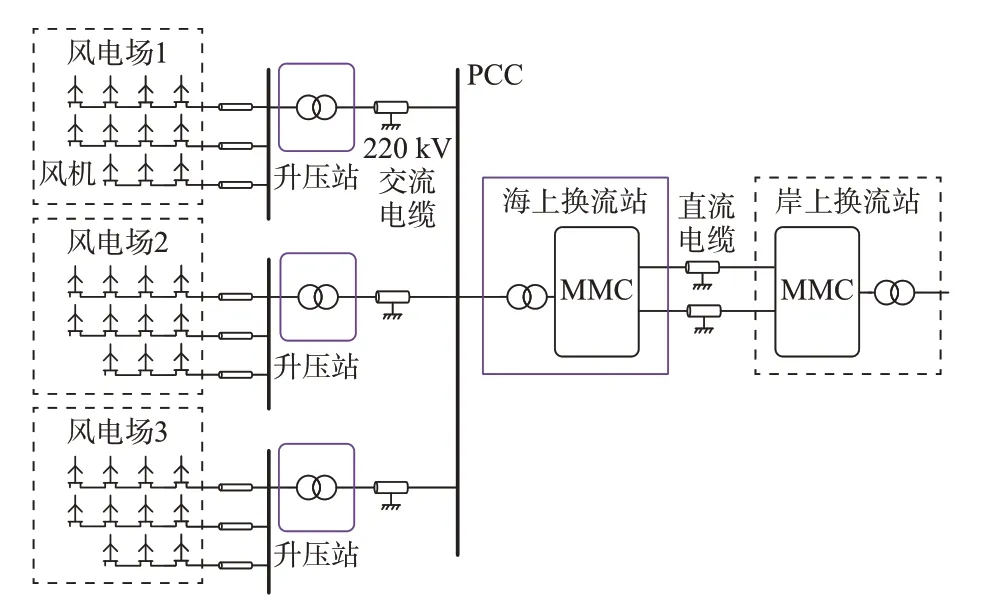
图2 海上风电经MMC-HVDC 送出拓扑结构Fig.2 Topology of offshore wind power transmission via MMC-HVDC
2)分布式DRU 的直流均压通过DRU 交流侧母线互联实现[9]。由于分布式DRU 直流侧串联(各DRU 直流电流相等),各DRU 的直流电压取决于自身传输的有功功率。当DRU 的交流侧母线互联时,可保证海上风电场的有功功率在DRU 上均衡分配。为了提高直流均压的可靠性,DRU 交流侧母线建议采用双回路互联[10]。
3)当部分DRU 故障或需要维护时,海上风电可通过剩余的非故障DRU 继续送出,HVDC 运行于直流降压模式。DRU 交流侧配置交流断路器,直流侧配置直流开关,岸上MMC 采用全桥型子模块或者混合型子模块。当部分DRU 故障或需要维护时,通过跳开故障DRU 的交流断路器将其与海上交流电网断开,闭合DRU 的直流开关将其直流侧旁路[11],而HVDC 的直流降压由岸上全桥型或混合型MMC 实现[11-12]。
4)DRU 交流侧需配置无功补偿装置。相比于电网换相换流器(LCC),DRU 虽然没有触发延迟角,但是换相电抗(变压器漏抗)仍会导致其交流电流明显滞后于交流电压。这一特点使得DRU 额定功率运行时需消耗0.4~0.5 p.u.的无功功率[13-14]。但是配置大量无功补偿装置将急剧增加海上换流站的体积和重量,降低DRU-HVDC 送出的经济优势。文献[15-16]提出让风电机组承担部分无功补偿,进而使DRU 交流侧无功补偿装置的无功功率配置在0.1~0.2 p.u.。但该方案亦面临海缆利用率下降、工程经济性降低等挑战。
为了更好地说明DRU-HVDC 的技术特点,将DRU-HVDC 与柔性直流输电、传统直流输电(LCC-HVDC)技术在拓扑结构、控制策略、经济性以及适用领域方面进行对比。
拓扑结构方面:DRU-HVDC 采用二极管整流器,该整流器可靠性最高、结构最为简单,属电流源型。柔性直流输电整流器采用MMC,由半桥或全桥子模块级联构成一个桥臂,通过投切子模块改变交流电压输出,属电压源型。而LCC-HVDC 采用基于晶闸管的整流器,该整流器与DRU 同属于电流源型,但由于触发延迟角的存在,LCC 需要消耗更多无功功率。需要注意的是,对比图1 和图2 可见,DRU-HVDC 将柔性直流送出系统的各升压站改为DRU 站,更早地实现交流到直流的转变,从而完全避免了高压交流汇集电缆(220 kV)的使用以及海上MMC 换流平台的建设。
送端换流站与风电机组网侧换流器(line-side converter,LSC)控制方面:
1)送端换流站的控制。DRU 不可控,无需控制系统;MMC 控制输出为参考波的幅值和相位(两个控制量),可采用开环控制实现频率的建立,双闭环控制实现dq轴的电压建立;LCC 控制输出为触发延迟角(一个控制量),可采用闭环控制实现频率的建立。
2)风电机组网侧换流器控制。DRU-HVDC 送出时,风电机组网侧换流器采用构网型控制;柔性直流送出时,风电机组网侧换流器采用跟网型控制;LCC-HVDC 送出时,风电机组网侧换流器可采用跟网型或构网型控制。
经济性方面:
1)成本。与柔性直流相比,DRU-HVDC 总投资成本可降低30%[6],LCC-HVDC 的成本介于二者之间。在半导体器件数量上,采用半桥子模块的MMC 换流站需要12N个绝缘栅双极型晶体管(insulated gate bipolar transistor,IGBT)和12N个反并联二极管,其中,N为每个桥臂子模块数。考虑相同容量和直流电压等级,则DRU-HVDC 和LCCHVDC 分别需要6N个二极管和晶闸管。不管是从单个器件价格或器件数量上考虑,DRU 相较于MMC 均更少,成本比LCC 和MMC 更低。相应地,DRU 体积更小、更轻型化,从而显著降低了海上平台的支撑结构建设成本。
2)损耗。与柔性直流输电相比,DRU-HVDC有望降低20%的损耗[6]。半桥型MMC 整流站的整体损耗约为其额定功率的0.7%~0.8%[17-18],主要包括换流阀、桥臂电感、直流电抗器等损耗,其中,换流阀损耗约占换流站整体损耗的50%,由导通损耗和开关损耗两部分组成,占比分别为70%和30%[19]。而二极管仅具有导通损耗,换流阀损耗仅占额定功率的0.11%,而DRU 整流站的损耗占比约为0.5%[20]。根据文献[18],LCC 整流站的整体损耗占比约为0.63%。可见,DRU 整流站的损耗相较于MMC 和LCC 更 低。
3)体积和重量。相比于柔性直流输电,DRUHVDC 具有降低80%海上换流站体积以及65%重量的潜力[6]。假设半桥型MMC 换流站的体积重量为1 p.u.,根据工程经验,MMC 子模块约占换流站总体积和重量的50%[19],即0.5 p.u.。其中,子模块电容约占子模块体积重量的50%,即0.25 p.u.;半导体器件占子模块体积重量的40%,即0.2 p.u.,剩下10%为其他部分的占比。即便认为二极管、晶闸管和IGBT 等半导体器件的单位体积重量相同,DRU 和LCC 的半导体器件数量仅为MMC 的50% 且无需子模块电容,为此换流阀的体积重量减少了0.2 p.u.×50%+0.25 p.u.=0.35 p.u.。根据文献[6],海上900 MW 的MMC(含变压器)体积约为50 000 m³(长54 m、宽30 m、高30 m),而1 200 MW 的DRU 体积为6 600 m³(每个DRU 长14 m、宽8 m、高9 m,共6 个);900 MW 的MMC与3 个海上升压变压器的重量合计为26 000 t(每个海上升压变压器重量为3 000 t,MMC 重量为17 000 t),而1 200 MW 的DRU 重量为9 000 t(每个DRU 的重量为1 500 t,共6 个)。
适用领域方面:
1)DRU-HVDC 适用领域。现有DRU-HVDC的研究主要集中在大容量远距离海上风电送出领域。随着未来沙漠、戈壁、荒漠地区的大型风电光伏基地及西电东送工程的建设,DRU-HVDC 在陆上新能源送出方面也有较大应用潜力。
2)柔性直流适用领域。除了用于新能源送出外,柔性直流还可用于实现异步电网互联、城市直流输配供电、孤岛供电以及构筑多端直流甚至直流电网。
3)LCC-HVDC 适 用 范 围。LCC-HVDC 主 要用于远距离大功率输电场景,例如准东—皖南±1 100 kV 特高压直流输电工程的换流容量为24 GW,线路全长为3 324 km。
DRU-HVDC 与柔性直流输电、传统直流输电技术对比分析总结如表1 所示。
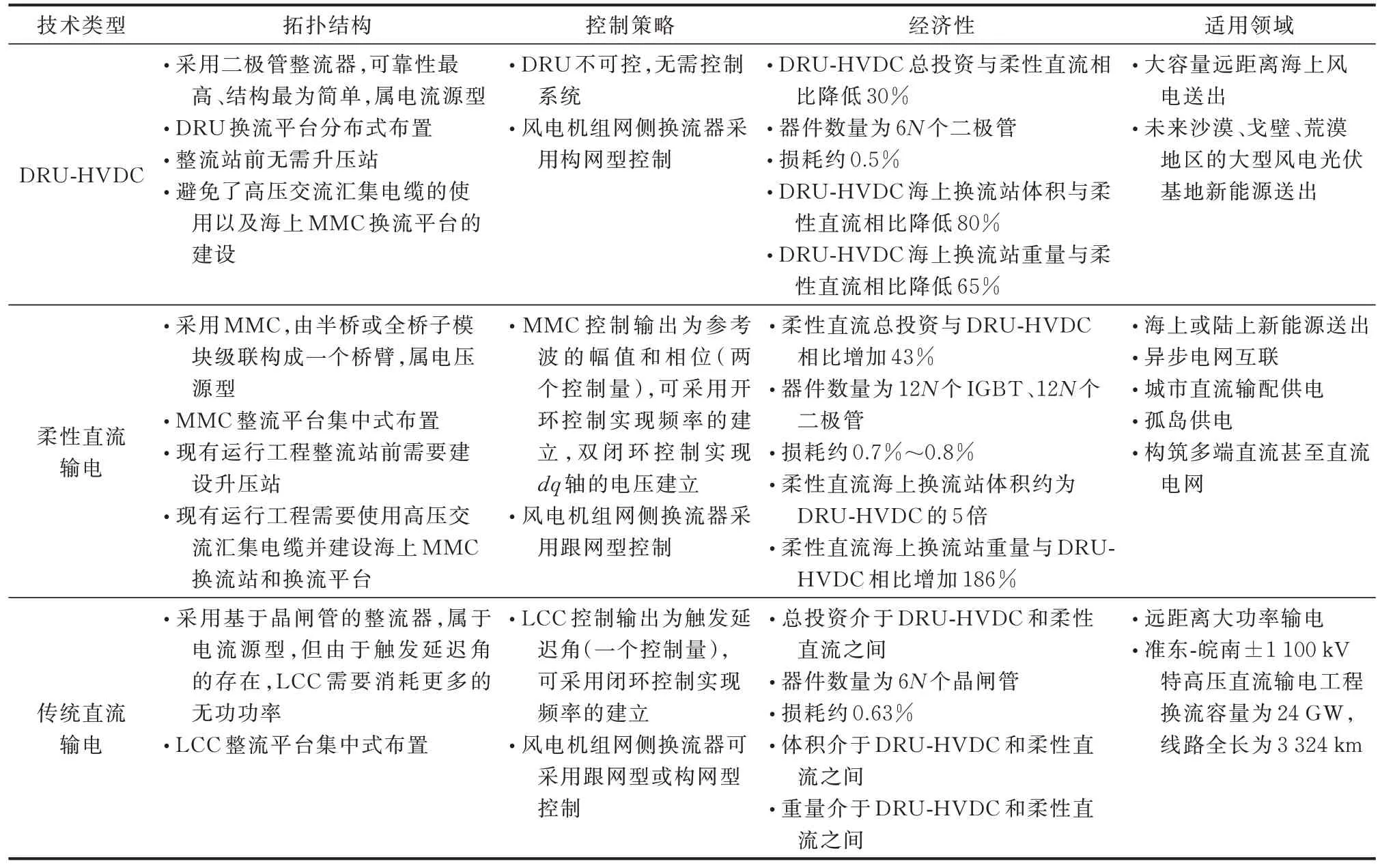
表1 DRU-HVDC 与柔性直流、传统直流送出技术对比Table 1 Comparison among DRU-HVDC, flexible DC and traditional DC transmission technologies
2 风电机组构网控制
由于全功率型风电机组的网侧换流器是风电机组与海上电网的接口,构建海上电网的任务主要由该换流器的控制系统实现。现有研究的风电机组网侧换流器构网控制主要可以分为两大类:集中式控制[21-25]和分散式控制[26-38]。集中式控制的总体思路借鉴柔性直流送出,建立DRU 交流母线公共连接点(point of common coupling,PCC)电压和频率。但是由于DRU 交流母线与风电机组的距离有数千米甚至十几千米,控制过程中不可避免地需要依赖通信系统。不同于集中式控制,分散式控制以建立换流器自身输出电压/频率为目标,所有的控制变量均为本地采集。
2.1 集中式控制
如前所述,风电机组网侧换流器集中式控制的被控对象是DRU 交流母线的滤波电容Cpcc的电气量,滤波电容Cpcc在dq坐标系下的动态可以表示为[21-23]:
式中:vpccd和vpccq分别为DRU 交流母线电压vpcc的d、q轴 分 量;iwd,i,sum和iwq,i,sum分 别 为 风 电 机 组i输 出 的有功电流和无功电流总和;ird和irq分别为滤波电容DRU 侧 电 流ir的d、q轴 分 量;ωpcc为 海 上 电 网 的 角频率。
基于式(1),图3 展示了集中式控制的具体控制框图。图中:Pwt,i和Qwt,i分别为风电机组i输出的有功功率和无功功率;θpcc为集中锁相环(PLL)输出的PCC 电 压 相 位;iw,i为 风 电 机 组i输 出 的 电 流;iw,i,sum为风电场汇集后的总电流;iwd,i和iwq,i分别为风电机组i输出的有功电流和无功电流;ir为海上换流站滤波电容DRU 侧电流;vf为风电机组的输出电压;上标“*”表示对应物理量的参考值。集中电压控制和集中频率控制通过比例-积分(PI)控制器生成总的风 电 机 组 有 功 电 流 参 考 值d,i,sum和 无 功 电 流 参 考 值q,i,sum,再 通 过 分 配 因 子kd,i和kq,(i分 配 因 子 数 值 通常为各风电机组容量占总容量的比例)确定各台风电机组的有功电流和无功电流参考值[24-25]。集中式控制由于需要依赖通信系统来传输控制信号,存在成本增加以及可靠性低等问题。
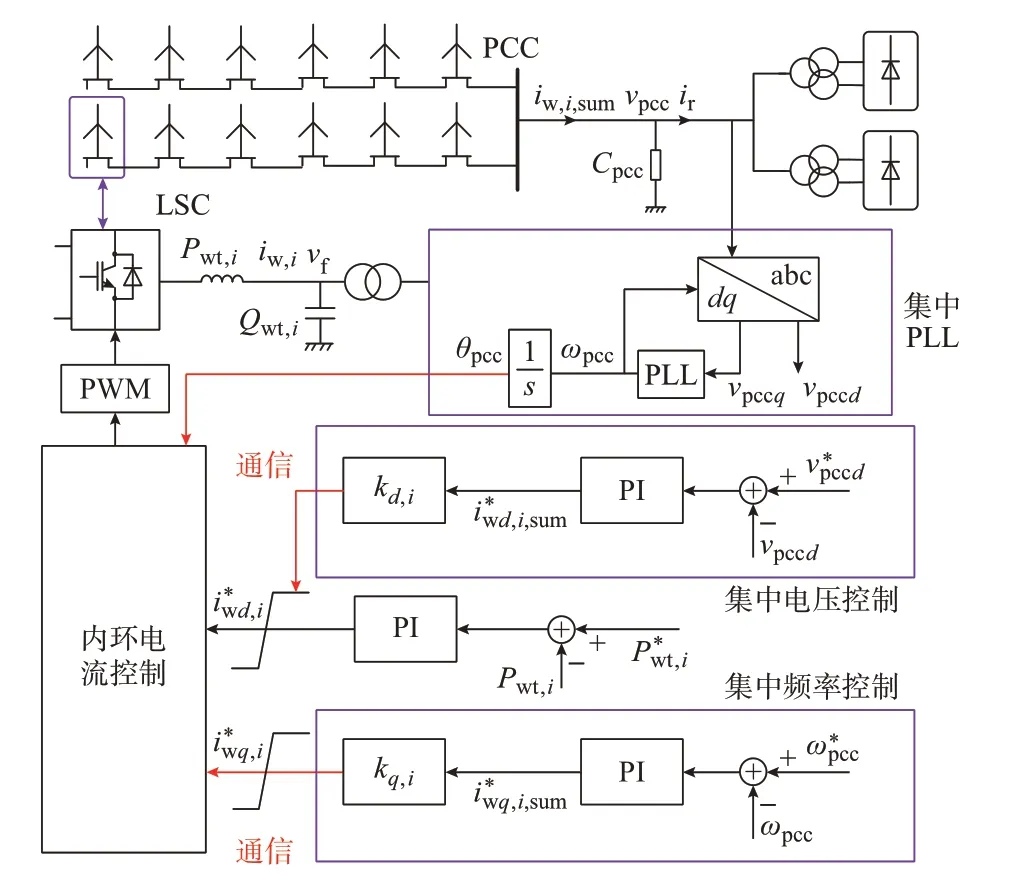
图3 海上风电机组LSC 集中控制Fig.3 Centralized control of LSC of offshore wind turbines
2.2 分散式控制
风电机组网侧换流器分散式控制的被控对象是换流器自身的电气量,主要可以分为全构网型控制[26-33](同时含有交流电压控制回路以及频率控制回路)和半构网型控制[34-38](仅有频率控制回路,无交流电压控制回路)。
2.2.1 全构网型风电机组换流器控制
2.2.1.1 电压和频率控制
换流器的全构网控制一般含有电压控制和频率控制,其中,电压控制往往通过调整换流器输出的有功、无功电流来实现风电机组dq轴电压对其参考值的闭环跟踪[29]。而频率控制可采用开环控制,由恒定角频率直接积分得到用于坐标变化所需的相位[26-29]。不同于文献[26-29]的开环频率控制,文献[30-31]提出了基于锁相环的闭环频率控制,如图4所示。图中:kf为频率控制系数;ω0为频率基值;θf为生成的参考相位,用于派克变换及其反变换;vfd和vfq分别为风电机组输出电压的d、q轴分量;ω为锁相环输出的角频率;PWM 表示脉宽调制。该频率控制通过调节q轴电压参考值来改变锁相环以及换流器输出的频率。该控制的主要优势在于:当离网风电机组需要接入海上电网时,锁相环可用来实现风电机组与海上电网的同步[39-40]。相比于开环频率控制,图4 所示的基于锁相环全构网控制可以有效避免离/并网过程中控制策略的切换,使风电机组启动投入过程和正常运行采用统一的构网控制,具有“即插即用”的优势。
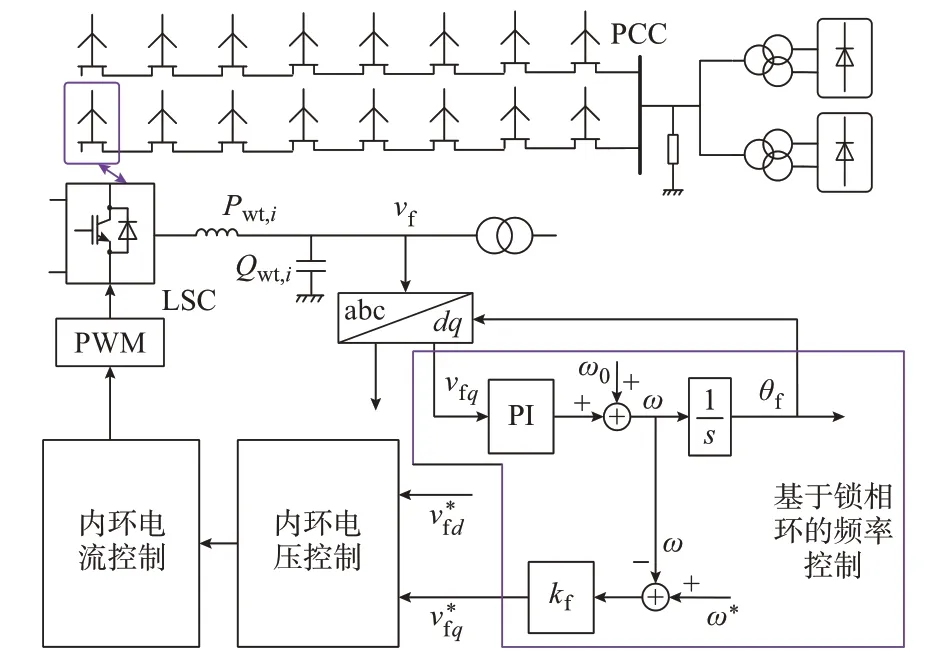
图4 基于锁相环的海上风电机组LSC 全构网型控制Fig.4 Fully-grid-forming control of LSC of offshore wind turbines based on PLL
2.2.1.2P-V和Q-f功率控制
在DRU-HVDC 送出系统中,无论是基于开环频率控制还是基于锁相环的频率控制,全构网型风电机组换流器功率控制建议采用P-V和Q-f控制(机侧换流器采用定直流电压控制),如图5(a)[30-31]和(b)[32-33]所示。图中:WT 表示风电机组;vf,i为风电机组i的输出电压;θi为风电机组i输出电压的相位;fpcc为海上电网的频率;kq为Q-f下垂系数;Vf0为风电机组交流电压基值;kG为一阶惯性环节的增益;kT为一阶惯性环节的时间常数。
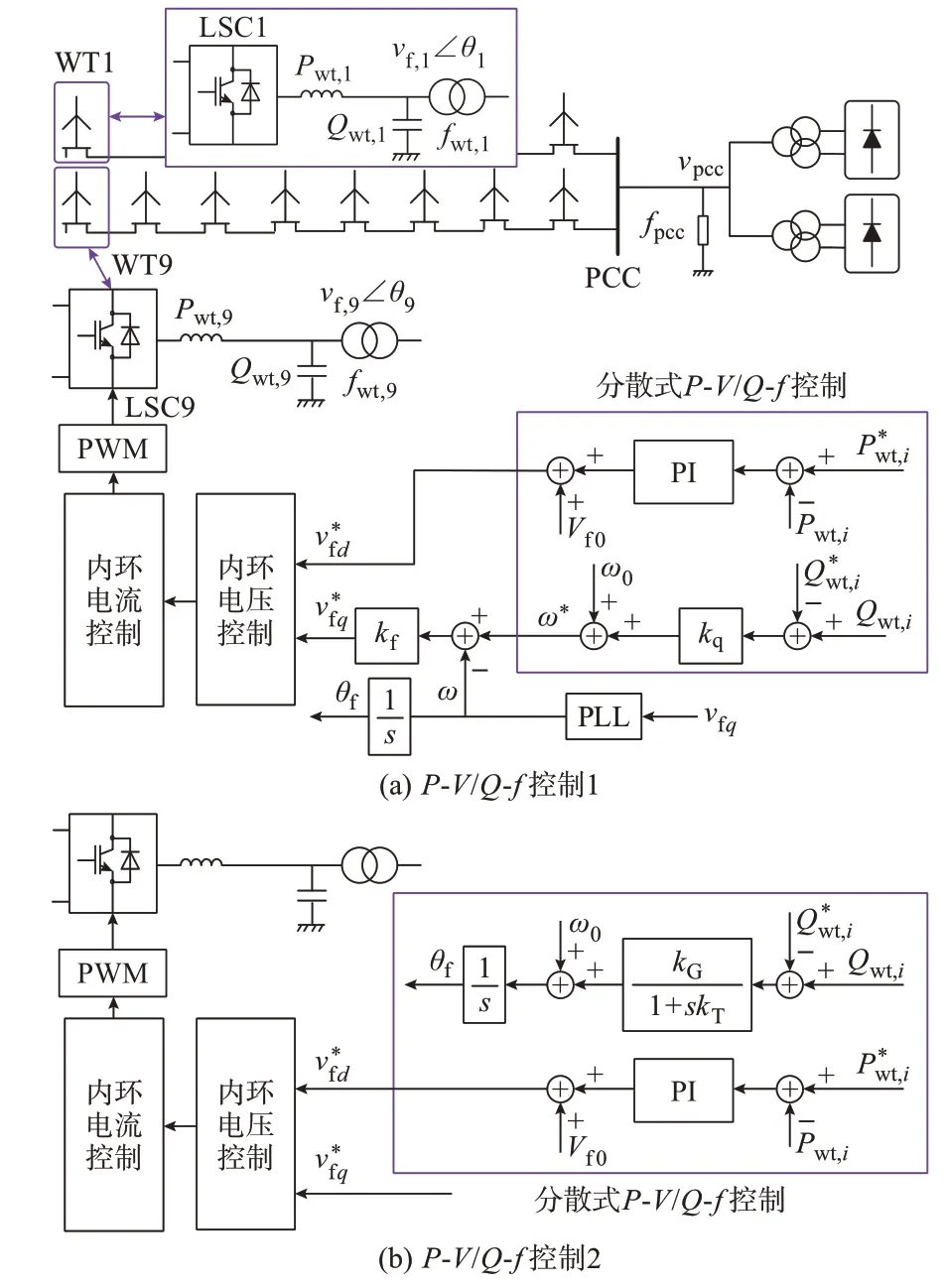
图5 全构网型风电机组换流器功率控制Fig.5 Power control of fully-grid-forming wind turbine converter
文献[22,30]把该P-V和Q-f功率控制缘由归结于DRU 的交流电压和有功功率的强耦合特性。但是,由于风电机组换流器与PCC 之间的阻抗主要呈感性(风电机组变压器漏抗主导),风电机组换流器的有功功率输出P与相角存在强耦合,无功功率输出Q与电压幅值V亦存在强耦合。在DRUHVDC 系统风电机组换流器功率控制的研究中,往往存在为何海上风电机组的功率控制无法借鉴孤岛微网的新能源控制(即采用P-f和Q-V控制[41-43])的疑问。针对这一问题,本文从风电场-DRU 层面以及单台风机层面,对DRU 系统的风机换流器功率控制进行进一步梳理。
1)风电场-DRU 层面分析功率控制
在孤岛微网中,储能等发电单元运行于负载跟随模式。当负载投切时,这些电源跟随式地通过P-f和Q-V控制改变自身输出的有功功率和无功功率来确保功率的平衡。在该运行方式下,孤岛微网的电压和频率能够维持在额定值附近。但对于DRUHVDC 送出系统来说,所有电源(即海上风电机组)均运行于最大功率跟踪模式[21-22],完全没有负载跟随类电源。如果此时海上风电机组仍采用P-f和QV功率控制,要确保海上风电场的频率在有功功率输出变化时仍保持在合理范围内,负载需运行于电源跟随模式进行相应投切。但是,当把DRUHVDC 当作一个负载时,它更像是一个恒定的负载,无法轻易调节。在此情况下,当风电机组采用P-f控制时,为保证海上电网有功功率平衡,海上风电场频率就成为唯一可以被调整的变量。图6(a)展示了风电场层面(即采用1 000 MW 单聚合风电机组)采用P-f控制时海上电网的频率随海上风电场有功功率出力的变化。从图中结果可见,当海上风电场功率由1 000 MW 下降到920 MW 时,海上交流电网的频率从50 Hz 增加至59.5 Hz(DRU变压器参数和直流侧参数的不同会对数值带来微小变化,但不影响结论)。这显然超出了海上风电场频率的稳定运行范围。
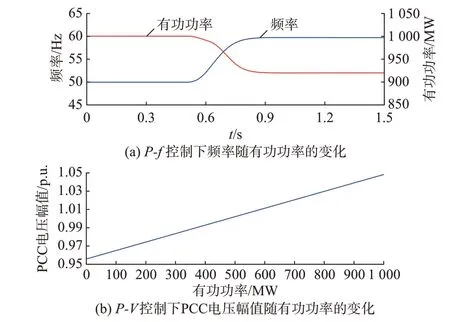
图6 P-f 和P-V 控制下海上风电场频率和PCC电压幅值波动范围Fig.6 Fluctuation range of offshore wind farm frequency and PCC voltage magnitude under P-f control and P-V control
另一方面,若风电机组采用P-V控制,当海上风电功率从1 000 MW 变化至0 MW 时,海上风电场的电压在0.955~1.048 p.u.之间,如图6(b)所示。这个范围的电压波动对于海上风电场是可接受的。因此,从风电场-DRU 层面来看,DRU-HVDC 送出系统的海上风电机组有功功率控制宜采用P-V控制(控制框图见图5)。文献[33]亦从灵敏度分析的角度出发,基于有功功率、无功功率对PCC 电压幅值和频率的偏导解析式,论证了风电机组采用P-V功率控制的必要性。
针对海上电网的无功功率,风电机组运行于无功负载跟随模式,主要的无功负载为DRU(如第1章所述,DRU 额定功率运行时需消耗0.4~0.5 p.u.的无功功率)。DRU 消耗的无功功率随着送出有功功率变化而变化[31,44]。由于风电机组换流器电压幅值已被用来控制有功功率,另一个构网控制的可控变量频率可被用来控制无功功率。当采用Q-f下垂控制时(如图5 所示),由于稳态时各风电机组的频率一致,各风电机组的稳态无功功率输出亦可维持相同[30]。文献[32]在Q-f控制中进一步加入了一阶惯性环节,以期提高控制的动态性能。
2)单台风电机组层面分析功率控制
图6 展示的有功功率分析侧重于风电场-DRU级别,以下就单台风电机组层面的有功功率传输展开进一步梳理分析。由于海上风电机组换流器到DRU 的PCC 阻抗主要呈感性,第i台风电机组传输至PCC 的有功功率Pwt,i主要取决于其自身输出电压 相 位θi和PCC 电 压 相 位 的 相 位 差θi,e,无 功 功 率Qwt,i主 要 取 决 于 风 电 机 组 的 输 出 电 压vf,i的 幅值Vf,i[31,45]:
式中:Xi为风电机组i滤波电容到海上PCC 之间的等效电抗;Vpcc为PPC 电压幅值。
当图5 中的风电机组WT1 的有功功率参考值下降时,由于P-V控制的作用,风电机组WT1 的交流电压幅值Vf,1会减小。根据式(3),Vf,1的下降将导致其无功功率输出Qwt,1变小。由于风电机组换流器Q-f下垂控制的作用,这将使得WT1 的频率fwt,1动态下降,进而带动海上电网PCC 的频率fpcc和其他风电机组的频率(如WT9 的频率fwt,9)随之下降。但因为频率同步需要一个过程,它们相较于fwt,1的变化更慢、幅度更小。在同步过程中,相位差θ1,e会相应下降。而由式(2)可得,θ1,e的下降会促使WT1 输出的有功功率降低,从而实现对功率参考值的追踪,并达到新的平衡状态。
从以上风电场-DRU 以及风电机组层面的功率传输分析可以总结出:
1)单台风电机组传输至PCC 的有功功率主要取决于风电机组与PCC 之间的相位差,这一点和传统系统类似。而DRU-HVDC 传输的有功功率取决于海上风电场PCC 电压的幅值[24]。
2)在风电机组输出的有功功率变化过程中,其相位的改变是通过LSC 的P-V控制、感性阻抗以及Q-f下垂控制协同作用完成的[31]。具体的调节过程如图7 所示。
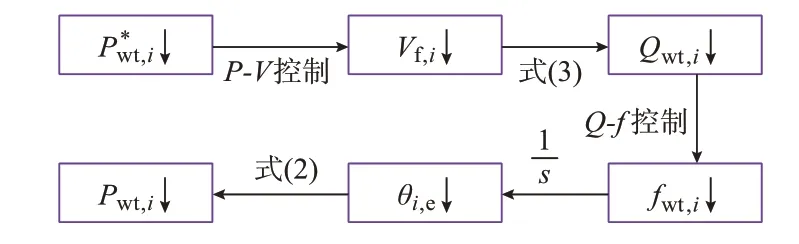
图7 风电机组有功功率变化工作机理Fig.7 Operation mechanism of wind turbine active power change
2.2.2 半构网型风电机组换流器控制
不同于全构网型风电机组换流器控制,半构网型风电机组换流器控制没有电压控制环节(但保留了频率控制)。去除电压环控制的主要依据为:当有功功率通过DRU-HVDC 送出时,海上电网PCC 的电压幅值Vpcc被DRU 自动钳位在一定范围内[46-47],见图6(b)。Vpcc与DRU 传输的有功功率Pwtt数学关系可以表示为[31]:
式中:Vdci为岸上侧直流电压;n为DRU 个数;Tdr和Xdr分别为DRU 变压器变比和漏抗;Rdc为直流电缆的等效电阻。
由于半构网型控制避免了交流电压控制环,该控制的核心是如何在电流环控制的基础上实现各风电机组的频率控制。值得注意的是,不同于全构网型,半构网型风电机组可延用现有风电机组机侧换流器控制功率、网侧换流器控制直流电压的形式,有利于降低风电机组的控制设计难度。但由于半构网型控制没有电压控制环节,一旦海上风电场与DRU失去连接或者风电场无风,海上电网的电压维持需要借助外部设备或者辅助方式实现。现有研究成果的半构网型控制主要包括两种:基于全球定位系统(global positioning system,GPS)的“FixReF”半构网型控制[34-36]和基于无功功率同步的半构网型控制[37-38]。
1)基于GPS 的“FixReF”半构网型控制
基于GPS 的“FixReF”半构网型控制如图8 所示,主要包括4 个部分:内环电流控制、直流电压控制、GPS 以 及q轴 电 压vfq下 垂 控 制。其 中,GPS 为各台风电机组提供相同的恒定频率和相位参考[34]。图8 中:和分别为风电机组输出电流d、q轴参考值;Vdc为风电机组换流器直流电压。本文针对为何需要GPS 来为各台风电机组提供相同相位参考做一个梳理。理想情况下各台风电机组根据恒定角频率积分亦可得到相同相位。在实际系统中,各台风电机组的启动时间不一样,不同时刻投入固定角频率积分将会得到不同的相位参考。当用于风电机组换流器控制的相位参考相差过大时,各风电机组的静态稳定往往难以满足要求。
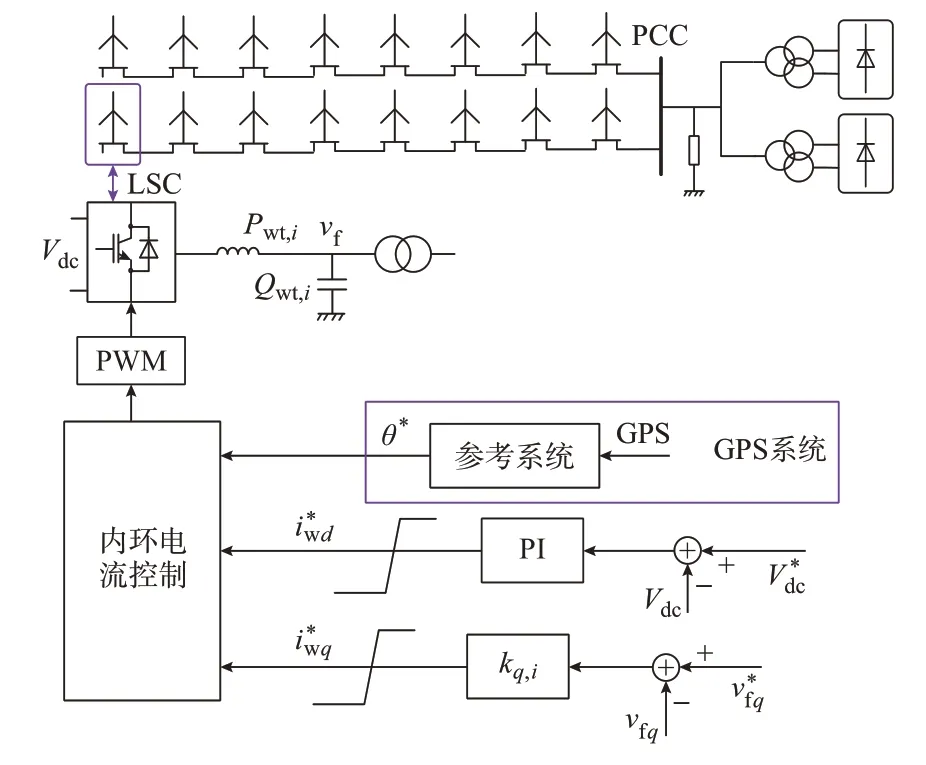
图8 海上风电机组网侧换流器基于GPS 的半构网型控制Fig.8 GPS based semi-grid-forming control of offshore wind turbine line-side converter
但是当仅有内环电流控制、直流电压控制、GPS且q轴电流参考值=0 时,风电机组换流器输出的无功功率将随着有功功率的增加而增加[35]。以图9(a)所示的2 台风电机组为例,当风电机组WT2输出的电流İ2幅值小于WT1 输出的电流İ1幅值时,依据基尔霍夫电流和电压定律可以得到如图9(b)所 示 的WT1 和WT2 的 电 压 相 量V̇1和V̇2。从 图9(b)可见,电压相量V̇1和V̇2的幅值以及各自功率因数角相差不大。根据无功功率输出公式,风电机组WT1 由于电流更大,在有功功率出力大时反而需要输出比WT2 更多的无功功率。为解决这一问题,“FixReF”半构网型控制采用q轴电压vfq下垂控制来调整36]。从图9(b)可 以发现,当幅值小于幅值时,风电机组1 换流器输出电压q轴分量v1q总是小于风电机组2 换流器输出电压q轴分量v2q。当采用vfq下垂控制来调整时,可以促使>,进而确保WT2 的功率因数角θ2得到有效增大(如图9(c)所示),输出更多的无功功率。图中:İ1c和İ2c分别为风电机组1 和2 的换流器经滤波电容后的输出电 流;İ1f和İ2f分 别 为 风 电 机 组1 和2 换 流 器 出 口 滤 波电容电流。
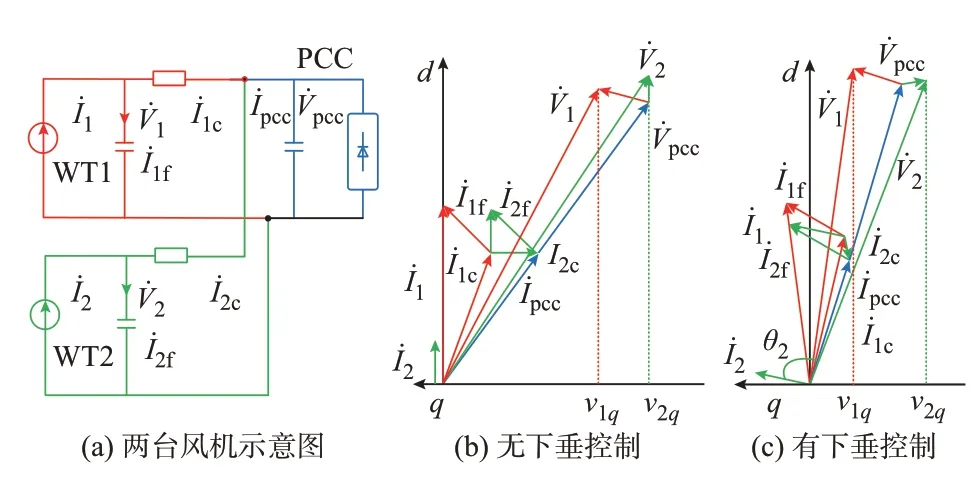
图9 海上风电机组LSC 基于GPS 的半构网型控制原理Fig.9 Principle of GPS based semi-grid-forming control of offshore wind turbine LSC
基于GPS 的“FixReF”半构网型控制还存在以下特点:虽然GPS 为各台风电机组网侧换流器提供相同的相位参考,但由于控制器并不把vfq控制在零,所以换流器输出电压vf的实际相位并不等于GPS 提供的相位θ*。此外,由于vfq不为零,换流器输出电流的dq轴分量并不是严格意义上的有功电流和无功电流。但由于换流器输出电压向量与d轴相位差较小(见图9(c)),d轴电流主要成分还是有功电流,这也解释了为何图8 中的直流电压控制输出仍为d轴电流参考值。
2)基于无功功率同步的半构网型控制
不同于基于GPS 的“FixReF”半构网型控制,基于无功功率同步的半构网型控制通过Q-f下垂控制生成各台风电机组的相位[37],如图10 所示。此外,为了确保换流器输出的电压向量vf和d轴重合,vfq控制环节经过PI 控制器生成无功电流参考值[38],这部分控制的原理和全构网型控制的q轴电压控制类似。在该控制下,风电机组的功率变化过程如下:当风电机组的有功功率指令增大时,内环电流控制将促使换流器输出电压vfq增大,进而减小iwq以及增大风电机组无功功率Qwt;无功功率同步控制环节(即Q-f下垂控制)再使得换流器功角增大,促使风电机组输出的有功功率增加并最终稳定在指令值。从本质上来说,该控制和基于无功功率同步的全构网型控制[30-33]在风电机组功率输出的动态上具有一定的相似性,差别主要在于该控制没有d轴的电压控制回路。
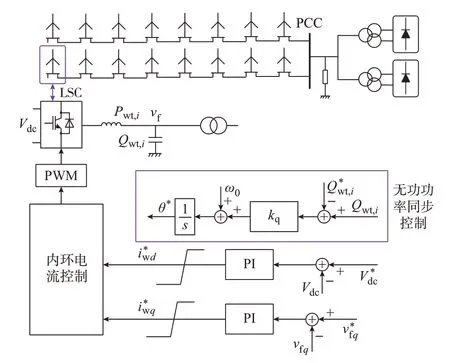
图10 海上风电机组LSC 基于无功功率同步的半构网型控制Fig.10 Semi-grid-forming control of offshore wind turbine LSC based on reactive power synchronization
表2 总结了各类风电机组换流器构网控制策略的特点。虽然集中式控制原理简单,但对通信的依赖对其应用限制较大,未来的主要发展方向仍为灵活的分散式控制。在分散式控制方案中,依据是否控制交流电压将其分为全构网型和半构网型两类。全构网型由于具有电压环控制,当海上风电场与DRU 失去连接或者风电场无风时,在维持构网方面具有显著优势。而基于锁相环的全构网型控制可以有效避免离/并网过程中控制策略的切换,具有“即插即用”的优势。但全构网型风电机组的控制环节多,且需要改变风电机组机侧换流器的控制。半构网型控制结构相对简单,无须改变机侧换流器的控制。但利用GPS 的控制策略会显著增加额外的成本和系统复杂度。而利用无功功率同步的半构网型控制虽避免了GPS 的使用,但在风电机组离/并网过程中仍需控制策略的切换。此外,由于半构网型风电机组没有电压环控制,一旦失去DRU 的交流电压钳位作用,构网的维持需要借助外部设备或者辅助方式实现。
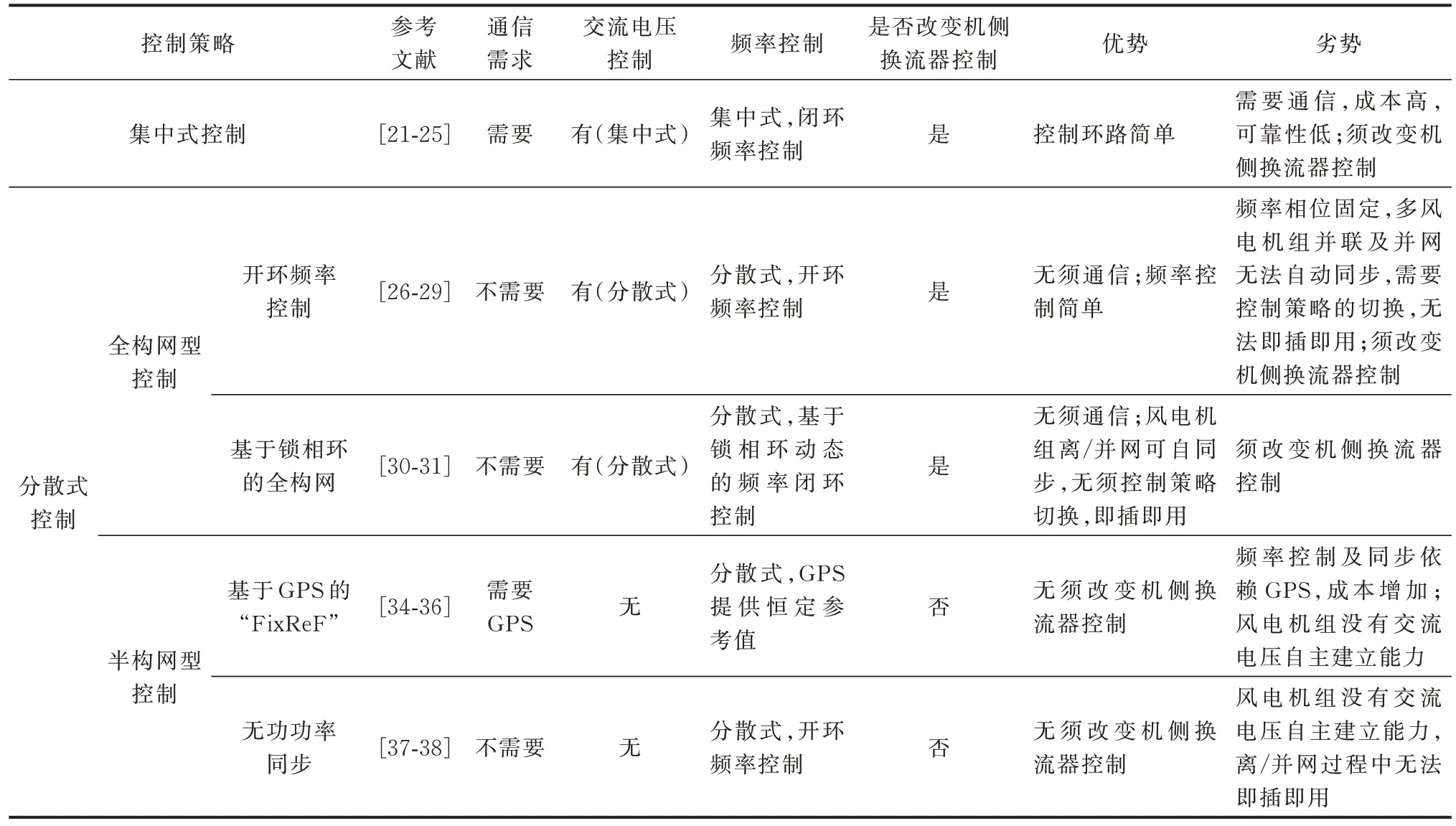
表2 海上风电机组LSC 控制策略对比Table 2 Comparison of LSC control strategies of offshore wind turbines
3 启动方法
由于二极管的单向导通特性,DRU-HVDC 无法像柔性直流那样将岸上电网功率直接反送至海上风电场提供启动能量。因此,启动是DRU-HVDC送出技术走向应用必须解决的问题。
海上电网启动过程中的功率需求主要来源于两部分[48]:1)风电机组辅助设备的启动功率,包括变桨和偏航驱动、冷却系统、通信系统和控制系统等,其主要以有功功率为主,占风电机组容量的1%~5%;2)汇集系统设备的启动功率,包括风电机组变压器和海底交流电缆等,其主要以无功功率为主。
现有研究的启动方法大体可分为两大类:辅助交流源和辅助直流源。辅助交流源主要包括辅助中压交流脐带电缆[10,36,49-50]、辅助模块化多电平换流器(MMC)[2,51-59]、并联运行的柔性直流送出或高压交流送出[60-66]以及配置柴油发电机[67-68]。辅助直流源主要包括海上风电机组的储能配置[30,69]和辅助低压直流电缆[70]。典型的DRU-HVDC 送出系统启动方法如图11 所示。值得注意的是,由于辅助交流源可为海上电网提供稳定的电压和频率,启动过程中海上风电机组采用全构网或半构网型控制均可;而辅助直流源无法为海上电网提供稳定的电压和频率,启动过程中海上风电机组宜采用全构网型控制。
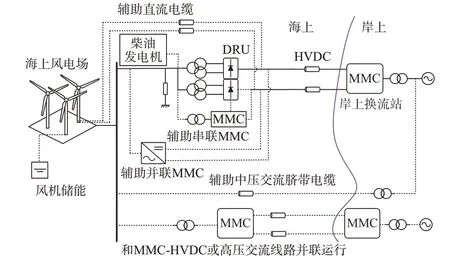
图11 DRU-HVDC 系统典型启动方法Fig.11 Typical start-up methods for DRU-HVDC system
3.1 辅助交流源启动
3.1.1 辅助中压交流脐带电缆
针对DRU-HVDC 送出系统的启动问题,工业界率先提出了并联辅助中压交流脐带电缆的启动方法[50],其电压等级与海上风电汇集系统电压一样(66 kV)。使用该启动方法的一个主要原因是海上风电经交流启动技术相对成熟。为保留DRUHVDC 送出的经济性优势,辅助中压交流脐带电缆的容量不宜过大。文献[49]指出,对于1 200 MW的海上风电场,辅助中压交流脐带电缆的容量可选取为50 MV·A(4.2%的总容量)。
利用辅助中压交流脐带电缆的启动过程大体包括[49]:1)中压交流脐带电缆与海上汇集系统互联,使汇集系统的交流电缆带电;2)逐一连接风电机组并解锁风电机组,使风电机组网侧设备带电并吸收/提供无功功率;3)连接DRU;4)首台风电机组输出有功功率;5)连接DRU 的滤波器;6)所有风电机组运行于最大功率跟踪模式;7)断开中压交流脐带电缆;8)调整海上风电场的频率。在上述启动过程中,海上风电送出系统有3 种运行模式:1)交流运行模式(风电场仅与中压交流脐带电缆连接);2)直流运行模式(风电场仅与DRU-HVDC 连接);3)并联运行模式(风电场同时与中压交流脐带电缆以及DRU-HVDC 连接)。为了减小上述运行模式变化对系统造成的扰动,风电机组的控制策略须尽可能具备不同运行模式下的稳定工作能力。而第2 章的风电机组控制策略在梳理与分析时主要针对直流运行模式,其在交流运行模式下的稳定工作能力仍有待进一步研究,如P-V/Q-f控制下的全构网型风电机组在交流运行模式下的稳定性。
此外,在启动过程中的并联运行模式下,为确保风电功率在DRU-HVDC 和中压交流脐带电缆的合理潮流分配,需要配置额外的集中式控制(将中压交流脐带电缆的有功功率控制在零[49-50])。由于该中压交流电缆的有功功率流动主要取决于海上电网PCC 与岸上电网母线的相位差。因此,该集中式控制可通过调整风电机组的频率间接控制海上电网PCC 的相位,从而控制有功功率在DRU-HVDC 和中压交流电缆之间的分配。为避免上述集中控制,文献[36]提出在辅助中压交流脐带电缆的岸上侧配置AC/AC 变换器。在启动初期的交流运行模式下,该AC/AC 变换器运行于构网控制模式,为海上电网提供稳定的电压和频率。在后续的并联运行模式下,AC/AC 变换器切换至有功功率控制,控制中压交流脐带电缆的有功功率为零。但此方法下的额外AC/AC 变换器会进一步增加投资成本。
3.1.2 配置海上MMC
通过配置海上MMC 为DRU-HVDC 送出系统启动的方法主要可分为两大类:MMC 与DRU 直流侧 串 联[2,51-54]以 及MMC 与DRU 直 流 侧 并 联[55-59]。串联方法的启动过程包括[51]:1)岸上逆变器直流降压运行,维持直流电压为海上串联MMC 额定直流电压的2 倍;2)将DRU 旁路,使岸上能量通过直流回路送至海上MMC,并将海上MMC 子模块的直流电压充至额定值;3)岸上逆变器直流电压降低至海上MMC 的额定值;4)海上MMC 运行于构网控制并连接汇集系统,进而启动汇集系统核心设备;5)连接并启动风电机组;6)投入DRU 使其与海上MMC串联运行;7)岸上MMC 直流电压提升至额定值;8)风电机组输出功率。在启动完成后,串联式MMC 通常处于持续运行状态(而非退出),传输部分海上风电。
另一启动方法为配置与DRU 直流侧并联的辅助MMC。在该方法下,海上电网的启动过程可以很好地借鉴柔性直流送出系统的启动方案[71]。但是直流侧并联的辅助MMC 需承受整个直流电压,致使子模块冗余度过高[55]。为提高辅助MMC 的经济效益,文献[56-57]提出了一种高变比辅助换流器的拓扑结构,通过子模块串的DC/DC 变换作用,使辅助MMC 直流电压等级降低。文献[58-59]在此基础上,还对该辅助换流器的拓扑结构进行了优化,并给出了相应的预充电策略。
综上所述,串联MMC 和并联MMC 都具备解决海上电网启动问题的能力,且均具有构网控制能力。但是海上MMC 的使用不可避免地降低了DRU-HVDC 的经济优势,且系统各部分交互作用复杂,出现问题时较难划分责任。另外,如何保证串联DRU 和MMC 直流电压的合理分配以及并联DRU 和MMC 的潮流分布也是需要重点关注的问题。
3.1.3 与柔性直流或高压交流线路并联运行
文献[60-63]提出了通过柔性直流或高压交流线路并联运行来实现DRU-HVDC 海上电网启动,但这种方法往往基于已有柔性直流或高压交流输送线路的海上风电场扩建[64-66],不具备一般通用性。其与3.1.1 节或3.1.2 节中启动方法主要的差别在于,启动后HVDC 或高压交流线路一般会用于传输功率,而非退出或者单用于构网。鉴于启动过程与3.1.1 节、3.1.2 节较为相似,这里不再赘述。
3.1.4 配置柴油发电机
配置柴油发电机为海上风电场提供启动能量是工程上较为成熟的选择[67-68],其启动过程与上述方案大致相同,这里不再赘述。但使用海上柴油发电机不可避免地增加了投资和维护成本并会对环境造成污染。
3.2 辅助直流源启动
3.2.1 风电机组配置储能
在风电机组层面配置储能,可以使海上风电机组具备自启动的能力[30,69]。储能装置可通过DC/DC 换流器直接连接至风电机组换流器的直流侧,并通过LSC 为风电机组辅助设备供电。风电机组层面配置储能后系统的启动过程具体为:1)配置了储能的各台风电机组首先启动,风电机组运行于全构网型控制模式;2)将各风电机组逐一与汇集系统连接,确保各风电机组之间不会出现环流;3)在汇集系统启动后,将未配置储能的风电机组启动;4)连接DRU;5)首台风电机组输出有功功率;6)连接DRU的滤波器;7)所有风电机组运行于最大功率跟踪模式。
相比于集中式配置储能,在风电机组层面配置储能具有不增加换流平台、提高风电场启动灵活性等优势,但对风电机组的空间和尺寸有额外的要求,如何提高储能的安全可靠性亦是需要解决的重要问题[72]。
3.2.2 使用辅助低压直流电缆
文献[70]提出通过辅助低压直流电缆为海上电网启动提供能量。该方法在启动时通过额外的低压直流电缆将DRU 的直流侧与风电机组换流器的直流侧连接起来,从而使能量可以通过岸上逆变器直接传输至海上风电机组。在启动过程中,为保证DRU 的直流电压和风电机组直流电压的匹配,由岸上逆变器控制的直流电压需要大幅降低至风电机组直流侧电压等级。在具备启动能量源后,风电机组、汇集系统以及DRU 的启动过程和配置储能装置的启动过程类似,这里不再赘述。该方法具有经济性好、无需功率变换装置等优点。但问题在于,在海上无风工况下,风电机组以及汇集系统需要能量源时,岸上逆变器为风电机组再次提供时操作复杂且不易实施。
表3 总结对比了DRU-HVDC 系统典型的启动方案。其中,成熟度一栏“+”数量越多代表成熟度越高。利用辅助中压交流脐带电缆和海上柴油发电机实现海上风电场的启动,是目前工业界最成熟的两种方法。但当利用辅助中压交流脐带电缆启动时,海上风电送出系统存在交流运行、直流运行以及并联运行3 种模式,风电机组的控制策略需具备不同运行模式下的稳定工作能力。采用辅助MMC 除了可以提供启动能量外,还可兼具无功补偿、滤波和构网控制功能,但会增加换流平台体积,降低DRU的经济优势。在部分风电机组层面设置储能作为一种可分散式提供启动能量的方案,配合全构网型控制具有较高的灵活性,但现有技术下仍面临塔筒内部安装空间不足、安全隐患较难克服等问题。
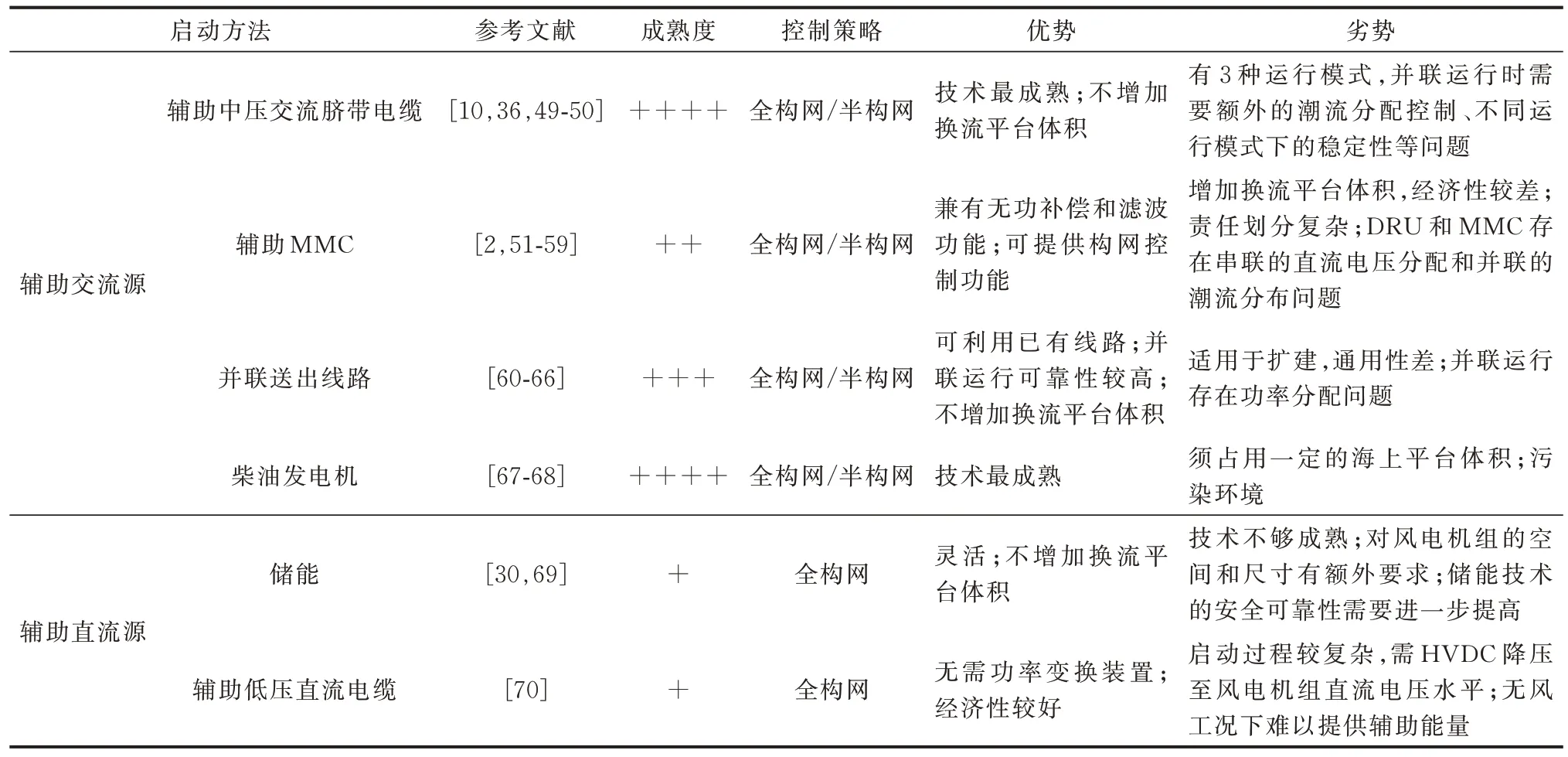
表3 海上风电场启动方法对比Table 3 Comparison of start-up methods for offshore wind farm
4 技术展望与热点问题讨论
在学术研究方面,国内外针对远海风电DRUHVDC 送出系统风电机组控制与启动方法已取得了一些成果;在应用方面,新疆达坂城已规划了一个±10 kV/12 MW 的不控整流风电送出示范工程[73]。然而在以下关键问题上仍然有待进一步突破:
1)稳定性研究。近年来,海上风电柔性直流送出的振荡稳定性问题已引发工业界和学术界高度关注[74-75],引发振荡的主要原因在于海上电网换流器之间存在复杂的交互作用。对于海上风电DRUHVDC 送出系统而言,换流器的交互作用也同样存在。但不同的是,DRU-HVDC 系统送端换流器是一个电流源换流器,且其交流端口动态特性无控制系统参与。此外,风电机组换流器运行于构网控制模式而非并网模式。文献[76]虽然对海上风电DRU-HVDC 送出系统的振荡稳定性进行了前期研究,但仍然局限于少量聚合风电机组的分析,缺少百台级别的风电机组构网型换流器相互作用以及构网型风电机组与DRU 相互作用后的系统稳定性深入研究。运行点变化、风电机组并网数量变化等对系统的振荡稳定影响研究并未深入全面。在暂态稳定性研究方面,现有研究主要聚焦在并网型换流器,针对DRU-HVDC 送出系统的构网型换流器暂态稳定问题还未开展。但可以预见的是,在海上电网大扰动后,构网型风电机组换流器的频率控制、Q-f控制、有功电流和无功电流的分配以及故障后DRU 与故障支路的并联等效阻抗大小均会对系统暂态同步稳定性产生重要影响。此外,当个别DRU 直流侧故障后,构网型风电机组易出现交流过电压问题,若多构网型风电机组同时并联运行于限电压模式,存在环流以及同步失稳等风险。总之,远海风电经DRU-HVDC 送出系统存在复杂的多数量、多类型换流器相互作用,在研究这些换流器小扰动下如何相互作用、故障下构网型风电机组换流器间如何保持暂态稳定等问题时,缺乏有效的基础理论和分析方法。亟待剖析该系统海上电网稳定运行机理、提出适用的稳定性分析方法。
2)分散式储能+构网型风电机组研究。分散式储能和构网型控制可使海上风电机组具备自启动的能力,一定程度模拟同步机的运行特性,但该方案在现有技术下仍面临如何缩小储能体积以及降低安全隐患等挑战。此外,现有研究在优化配置、经济性分析以及可靠性研究方面均存在不足。对于海上风电DRU-HVDC 送出系统而言,针对部分海上风电机组配置储能虽有解决启动问题的潜力,但是储能容量配置方案仍须考虑以下因素:一方面,当风电场处于长时间无风状态时,储能是否能够持续为海上风电机组和汇集系统相关辅助设备提供能量;另一方面,若储能容量配置过剩,系统的经济性将受到显著影响。此外,在恶劣的海上环境以及困难的维护条件下,如何有效提高分散式储能和海上风机的协同运行可靠性也亟待进一步研究。
3)汇集系统频率方案研究。由于换相电抗(变压器漏抗)导致DRU 交流电流明显滞后于交流电压,使得DRU 工频、额定功率运行时需要消耗0.4~0.5 p.u.的无功功率。工频下,配置的大量无功补偿装置将急剧增加海上换流站的体积和重量,削弱DRU-HVDC 送出的经济优势。采用中频汇集方案不仅可以减小DRU 滤波器的体积,还可以降低换流平台的建设成本,进一步提升DRU-HVDC 送出方案的经济性。但是提高运行频率将导致海缆载流量下降[77-79]。此外,中频汇集对系统的振荡稳定性以及暂态稳定性影响也还有待进一步研究。
4)DRU 多端系统研究。相比于点对点的直流送出,多端直流送出具有高灵活性、高传输可靠性以及低成本等优势[80-81]。当DRU-HVDC 接入多端系统时,如何确保DRU 和多端系统相互作用后系统的稳定运行仍需深入研究。此外,为了保证多端直流系统在直流故障后的可靠运行,各换流器配置直流断路器是潜在的解决方案。但是海上侧直流断路器的配置将使得投资成本显著增加、海上平台建设愈发困难。不在海上DRU 侧配置直流断路器,而通过风电机组自身的控制实现直流故障电流的主动抑制以及海上风电送出的快速恢复是未来的潜在研究点。
5)DRU-HVDC 技 术 的 陆 上 应 用。“双 碳”背 景下,国家能源局把以沙漠、戈壁、荒漠地区的大型风电光伏基地建设及西电东送工程作为“十四五”新能源发展的重中之重,正全力推动以上述地区为重点的大型风光电基地建设[82]。而在新能源技术层面,构网型新能源在渗透率提升背景下的逐步规模化应用呈现不可逆转的趋势。这些新能源西电东送工程的需求以及构网型新能源的快速发展,使得低成本的DRU-HVDC 技术在陆上应用亦受到空前关注。但是相比于海上风电送出,DRU-HVDC 用于陆上沙漠、戈壁、荒漠地区的大型风电光伏基地送出须额外考虑直流故障穿越问题。在海上风电送出背景下,直流输电线路为海底电缆,故障率较低,且通常为永久性故障,因此,海上DRU-HVDC 系统对直流故障穿越需求并不高。而当DRU-HVDC 用于陆上新能源送出时,往往采用直流架空线路,系统需具备直流故障穿越能力。在点对点送出系统中,解决DRU-HVDC 直流故障穿越的潜在思路包括:a)新能源故障电流馈入主动控制,直流故障后,送端换流站故障电流主要由交流电流经DRU 馈入形成,通过降低新能源输出电流,可抑制直流故障电流上升甚至将其控制为零;b)通过辅助设备将DRU 交流侧电压控制为零,对于DRU 而言,其直流电压和交流电压存在强耦合关系,降低DRU 交流侧电压可以降低直流电压,进而减小直流故障电流,潜在的实现方案包括为DRU 交流侧配置辅助静止同步补偿器、在DRU 直流侧串联VSC(交流侧两者为并联)、在各桥臂的二极管处反并联晶闸管实现交流侧短路[83]等;c)为DRU-HVDC 配置直流断路器,在直流连续故障后,跳开直流断路器实现熄弧[84],但该方案会不可避免地增加系统投资成本,其与基于全桥型子模块或者复合子模块的柔性直流[85]经济性对比有待进一步研究分析。在多端系统/直流电网中,为提高系统直流故障后的送电可靠性,不管是基于DRU还是MMC 的系统,均可在各线路两端配置直流断路器。在此背景下,DRU 系统和MMC 系统的直流故障穿越方案具有相似性。
5 结语
1)相较于海上风电柔性直流送出,DRUHVDC 送出系统将原交流升压站改为分布式DRU站,更早地实现交流到直流的转变,从而完全避免了高压交流汇集电缆以及海上MMC 换流站和换流平台,有效降低了海上风电送出技术的投资成本。此外,DRU 的分布式布置使得部分DRU 故障或退出运行时,海上风电仍能通过剩余的非故障DRU 继续送出,提高了系统运行的可靠性和灵活性。而分布式DRU 的直流均压问题可通过DRU 交流侧母线互联实现。
2)由于DRU 的不可控特性,构建海上电网的任务须由海上风电机组通过自身的控制实现。相比于风电机组网侧换流器的集中式控制,分散式控制的所有控制变量均为本地采集,具有更高的可行性。全构网型的分散式控制同时含有交流电压控制回路和频率控制回路,即使在海上风电失去DRU 的交流电压钳位作用,海上电网的构建仍能通过自身实现。而全构网型风电机组的功率送出机理存在以下两个层面:在风电场-DRU 层面,传输的有功功率取决于海上风电场PCC 电压的幅值;在风电机组层面,单台风电机组传输至PCC 的有功功率主要取决于风电机组与PCC 之间的相位差,而且在风电机组输出的有功功率变化过程中,其相位的改变是通过网侧换流器的P-V控制、感性阻抗以及Q-f下垂控制协同作用完成。不同于全构网型控制,半构网型控制结构相对简单,无须改变机侧换流器的控制。但在风电机组离/并网过程中仍需控制策略的切换。此外,由于半构网型风电机组没有电压环控制,一旦失去DRU 的交流电压钳位作用,构网的维持需要借助外部设备或者方式实现。
3)由于DRU 的单向导通特性,DRU-HVDC 无法像柔性直流那样将岸上电网功率反送至海上风电场,为其提供启动能量。利用辅助中压交流脐带电缆启动技术相对成熟,但仍然需要解决好启动过程中交流运行、直流运行以及并联运行模式的无缝稳定切换问题。而在部分风电机组层面配置储能并采用全构网型风电机组具有较高的灵活性,但现有技术下仍面临风电机组塔筒内部安装空间不足、储能安全隐患较难克服等问题。
4)稳定性研究、储能配置规划、汇集系统频率方案以及“沙漠、戈壁、荒漠”地区的新能源送出应用等将是未来值得探索的研究方向。
