计及保护动作时间协调配合的双馈风电场故障穿越策略
2024-01-18张新雨何佳伟谢仲润周博昊盛亚如
李 斌,张新雨,何佳伟,谢仲润,周博昊,盛亚如
(智能电网教育部重点实验室(天津大学),天津市 300072)
0 引言
“双碳”目标下,中国新能源发电装机容量与占比快速提升,将构建以新能源为主力电源之一的新型电力系统。根据相关预测,中国风电装机容量将逐年增高,2030 年预计将达到800 GW[1-2]。随着并网风电场容量与占比的不断提升,风电场并网对电压支撑能力弱的缺点日益凸显,无功补偿问题成为其安全运行与可靠供电的核心问题[3-4]。电网故障以后,风电场并网点电压产生强烈波动,严重时会引起大规模风机脱网事件,对系统的运行稳定性和供电可靠性造成极大影响。因此,一般要求入网风机具备不脱网运行的能力,即可以实现低电压穿越(LVRT)和高电压穿越(HVRT)[5-6]。
双馈风力发电机(DFIG)因造价低、功率损耗较小等优势脱颖而出,占据了全球50%以上的风电市场份额[7]。目前国内外针对双馈风机的低电压穿越问题研究已经相对成熟[8-9]。文献[10-12]对双馈风机在低电压期间的无功出力能力及无功出力优先级进行分析。由于双馈风机的无功出力限制,一般需要引入无功补偿装置以进一步提高风电机组的故障穿越能力。文献[13]考虑双馈风机和静止无功发生器(SVG)的无功出力,提出优先利用SVG、后利用双馈风电机组进行无功补偿的无功分配策略。
但需要注意的是,上述文献主要关注风电场的低电压穿越问题。事实上,风电场在系统故障以后,还需考虑故障切除以后或重合闸期间的高电压穿越问题[14-15]。文献[16]指出发生在酒泉风电基地的脱网事故中,在故障清除、电网电压恢复正常运行状态后,系统的无功盈余诱发风电机组高电压脱网。为抑制高电压故障期间转子的过电压与过电流现象,文献[17]提出一种转子侧串联有源变阻尼的控制策略;文献[18]对双馈风机的电流可行域进行分析,并基于模型预测控制提出穿越方法;文献[19]在双馈风机两侧换流器分别附加了转子电流抑制和外环电网电压控制;文献[20]提出一种动态调整转子无功电流并结合暂态定子磁链的微分补偿策略。为有效提高对电网电压的支撑作用,文献[21]提出了一种动态无功补偿策略;文献[22]协调控制转子侧换流器与网侧换流器,在不同电压区间控制无功功率的输出。文献[23]提出在直流侧电容与转子侧换流器之间连接改进的直流斩波器,在高电压故障期间稳定双馈风机的直流电压。
然而,以上所提出的高电压穿越方法只针对单一电压骤升的场景,即在已发生电压骤升的情况下如何减小对系统的影响从而提高风机的故障穿越能力,并没有考虑现有的低电压阶段无功补偿策略和保护动作后故障隔离的协调配合。实际系统运行中,电压骤升在电压骤降故障恢复后发生的概率更大[24],故障切除后,在低电压阶段系统无功功率盈余会引起暂态过电压,导致风机高电压脱网。因此,如何预防在故障清除、电压恢复后出现的暂态过电压问题,仍需进一步研究。
针对上述问题,本文首先推导出双馈风机的转子侧换流器与网侧换流器输出的无功功率极限值,分析对比了转子侧换流器、网侧换流器与SVG 的无功控制动态响应速度。在此基础上,提出一种计及保护动作时间的风电场无功补偿协调配合策略,设计了双馈风机转子侧换流器、网侧换流器与SVG 的无功出力曲线,协调三者间的无功补偿占比,从而有效抑制故障清除后的过电压问题。
1 暂态过电压的产生及影响
1.1 暂态过电压的产生
风电场内的无功电源主要包括风电机组和无功补偿装置,其中无功补偿装置主要包括并联电容器、静止无功补偿器(SVC)、SVG 等。本文重点针对双馈风机以及SVG 展开讨论。由双馈风机的工作原理可知,其网侧换流器能够输出一定的无功功率;同时,转子侧换流器同样能够控制一定的无功功率,通过风机定子进行输出。为方便表述,下文将转子侧换流器控制的风机定子无功输出简称为转子侧换流器无功输出。
针对已有风机脱网事故分析可知,风机高电压脱网主要出现在电网故障清除后的电压恢复期间。双馈风电场系统结构和暂态过电压产生过程如图1 所示。图中:阶段1 为电压跌落阶段;阶段2 为过电压阶段;t3为电压恢复时刻;PM为风力机输入的机械功率;Ps与Qs分别为定子输出的有功与无功功率;Pc与Qc分别为网侧换流器吸收的有功与无功功率;Pr与Qr分别为转子输出的有功与无功功率;Pg与Qg分别为风机总输出有功与无功功率;T1、T2、T3 为 变 压 器;l为220 kV 送 出 线 路;U为 并 网 点 电压标幺值。在电力系统中,无功功率的大小会对并网点电压产生影响。t1时刻电网发生短路故障,风机机端电压降低,在阶段1,即电压跌落期间,系统需要提供无功功率来支撑并网点电压。此时,系统中的无功补偿设备,如双馈风机的转子侧换流器、网侧换流器与SVG 均需要提供无功功率,在这个阶段希望尽可能多地提供无功功率来提高风机的低电压故障穿越能力。t2时刻保护动作,断路器跳闸以切除故障线路,电压迅速恢复。此时,由于双馈风机与无功补偿装置的无功输出响应需要一定的时间,在保护动作后的一小段时间内,系统中依然有无功功率的产生,系统中的无功功率过剩导致暂态过电压,引起风电机组高电压脱网。
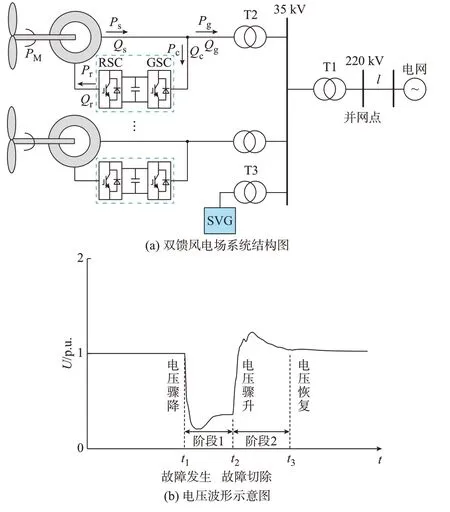
图1 双馈风电场结构及暂态过电压产生过程示意图Fig.1 Schematic diagram of structure and transient overvoltage generation process of doubly-fed wind farm
1.2 电压骤升对双馈风电机组的影响
定子轴系下,空间矢量形式的双馈风机电压方程和磁链方程如式(1)所示。
式中:us、ur分别为定、转子电压;is、ir分别为定、转子电流;Ψs、Ψr分别为定、转子磁链空间矢量;Rs、Rr分别为定、转子电阻;Ls=Lm+Lls为定子自感,Lr=Lm+Llr为转子自感,其中,Lm为励磁电感,Lls、Llr分别为定、转子漏感;ωr为转子转速;D 为微分算子。
假设故障期间机端的稳态电压幅值为Us1,在t=t0时刻,故障清除,机端的稳态电压幅值上升至Us2,忽 略 定 子 电 阻,可 得 转 子 感 应 电 动 势er为[25]:
式中:H=Us2-Us1;τs=Ls/Rs为定子衰减时间常数;ωs为同步转速;sg=(ωs-ωr)/ωs为转差率。
由于转差率sg一般很小,当风机处于稳定状态时,转子感应电动势的幅值约为sg倍的定子侧电压。在故障清除后,定子侧电压迅速升高,定子磁链不能突变,在故障清除后会使得定子磁链出现暂态量,从而使得转子感应电动势出现衰减的自由分量增量。此时,若双馈风机无法提供足够的励磁电压,将导致转子侧电流过大,对换流器造成危害。因此,要求风机、无功补偿装置在故障期间能够快速补偿无功缺额,实现低电压穿越;而在故障清除以后,则能够快速降低发出的无功功率,防止出现无功过剩问题,避免高电压穿越问题的产生。
2 双馈风电场的无功分配方式
2.1 风机与SVG 的无功分配方式
一般情况下,风电场均会配备无功补偿装置。因其投资建设成本较大,现有对无功功率分配的理论研究中多采用将SVG 作为备用无功补偿的分配方式[26-27],这种分配方式可一定程度上减小SVG 的配置容量,从而减少建设成本。考虑风电场的经济性,为充分调用双馈风机自身的无功补偿能力,将无功功率优先分配给双馈风机,当系统的无功需求Qref小于双馈风机可发出的无功功率时,Qref由双馈风机自身提供。否则,SVG 与双馈风机共同进行无功补偿。
2.2 风机转子侧换流器与网侧换流器的无功分配
为了更好地实现风机的故障穿越,充分发挥双馈风机自身的无功补偿作用,有必要讨论双馈风机的无功出力能力,即转子侧换流器无功出力与网侧换流器的无功出力。
2.2.1 转子侧换流器控制的定子侧无功极限
由于转子侧换流器采用定子磁链定向的矢量控制,由式(1)进一步变换可得dq坐标系下转子电流与定子功率之间的关系为:
式中:ird、irq分别为转子电流的d轴分量与q轴分量;us为定子电压幅值。
由于电力电子器件的过流能力有限且转子侧变流器的过电流能力有限,双馈风机定子侧输出的功率有限,不能为任意值,即有
式中:Irmax为转子侧变流器允许的最大电流值;ir为转子电流幅值,有=+。
因此,定子侧输出的无功功率的最大值Qsmax与最小值Qsmin可表示为:
2.2.2 网侧换流器的无功极限
双馈风机的网侧换流器采用的是电压型换流器,在风速波动或发生故障时,可以通过控制网侧换流器使其与系统有无功功率的传送,可以发出或者吸收无功功率。但是由于电力电子器件容量的限制,网侧换流器输出的无功功率不能无限大,受到变流器最大容量的限制。假设网侧换流器中的电力电子器件的最大功率容量为Scmax,则:
由于网侧换流器的有功功率Pc与转子有功功率Pr相等,即Pc=Pr=sgPs,则式(6)可变为:
由式(7)可知,网侧变流器的无功出力主要与定子侧的有功功率、转差率及网侧变流器的容量有关。换流器容量一般为0.2~0.3 p.u.,小于风机的额定容量,因此,网侧换流器的无功补偿能力小于转子侧换流器控制的定子无功调节能力。
根据上述分析,定子侧的无功极限要大于网侧的无功极限,其无功调节能力大。由于定子侧的无功功率是通过控制转子侧换流器得到,转子侧无功功率的大小与转差率有关,定子侧优先出力可减少功率变换器所处理的功率。因此,对双馈风机进行无功功率分配时,应优先利用转子侧变流器控制定子为系统提供无功功率。
综上所述,系统进行无功功率分配时,首先将其分配给风机的转子侧换流器,其次分配给风机的网侧换流器,最后分配给SVG。后续无功补偿策略设计时需参考该分配方式。
3 双馈风机与SVG 的无功补偿动态响应特性分析
风电场的无功支撑是由双馈风机与SVG 共同提供,按照本文确定的无功出力顺序,对转子侧换流器、网侧换流器以及SVG 的无功补偿响应速度进行分析。在自动控制理论中,系统的控制带宽能够反映系统的跟踪速度,可通过系统的闭环传递函数的幅频特性曲线得到。由自动控制理论中的推导可知,对于一、二阶系统,单位阶跃响应的速度与控制带宽成正比,对于任意阶次系统,这一规律仍然成立,若系统的带宽扩大λ倍,系统的响应速度则加快λ倍[28]。因此,对转子侧换流器、网侧换流器及SVG的控制带宽进行分析。
3.1 双馈风机的无功补偿动态响应分析
双馈风机转子侧换流器与网侧换流器的功率方程与数学模型见附录A 式(A1)至式(A4)。通过对转子侧换流器与网侧换流器的控制策略分析,可得到两侧换流器的无功功率控制系统的框图见附录A图A1。由此可得到转子侧换流器与网侧换流器的无功控制系统的闭环传递函数Gs(s)与Gc(s)分别为:
其中
式中:s为复变量;kp1s与ki1s、kp2s与ki2s分别为转子侧换流器无功控制的外环、内环比例与积分参数;kp1c与ki1c、kp2c与ki2c分别为网侧换流器无功控制的外环、内环比例与积分参数;σ=1-/(LsLr)为电机漏磁系数;RT和LT分别为网侧变流器交流侧的等效电阻和等效电感;Us为定子电压幅值;Em为网侧电压幅值。
由于定子漏感相比于励磁电感来说很小,因此Lm/Ls≈1。比较两个传递函数可知,在双闭环控制的比例-积分(PI)参数相同时,两者主要区别在于电流响应环节中的电感不同。由于转子侧电流响应需要提供励磁阻抗,且σLr要大于网侧换流器出口的电感LT,由转子侧换流器控制的风机的无功控制带宽要显著低于网侧换流器的无功带宽,网侧换流器的响应速度更快。有些情况下利用电力电子设备补偿无功时将外环闭锁,只利用内环对无功电流进行控制,这种情况依然满足上述所分析的响应速度特性。由于篇幅限制,本文仅对所有装置均考虑外环的情况进行讨论,其他情况不再进行详细推导。
本节以附录C 表C1 的数据为例,计算相应系统闭环传递函数的伯德(Bode)图见附录A 图A2。转子侧换流器的控制带宽为2.24 Hz,网侧换流器的控制带宽为26.2 Hz,网侧换流器的控制带宽约为转子侧换流器控制的风机定子侧的控制带宽的10 倍,根据自动控制原理可知,网侧换流器的响应速度比转子侧换流器所控制的风机定子侧约快一个量级。
3.2 SVG 的无功补偿动态响应分析
SVG 作为无功补偿装置,通过电抗器或变压器与电网相连,在交流侧能够得到幅值和相角都可调的交流电压,实现无功补偿的能力。其功率方程与数学模型见附录A 式(A5)和式(A6)。同理,可得到SVG 的无功控制系统的闭环传递函数Gc(s)为:
其中
式中:kp1和ki1、kp2和ki2分别为外环、内环的比例和积分参数;Rg和Lg分别为SVG 交流侧的等效电阻和等效电感;En为网侧电压幅值。
计算相应系统闭环传递函数的Bode 图见附录A 图A3。SVG 的无功控制带宽为24 Hz,与网侧换流器的控制带宽相差不大。
通过上述分析可知,网侧换流器与SVG 的无功控制带宽较为接近,皆高于转子侧换流器控制的风机定子侧无功带宽。这表明,风机定子侧输出无功的响应速度慢于网侧换流器和SVG,且由第2 章的分析可知,定子侧的无功补偿能力最大,在无功支撑时其承担主要的补偿作用。因此,系统在故障清除后因无功盈余而导致的过电压,主要取决于定子无功的响应速度,后续无功穿越设计时需对其重点关注。
4 计及保护动作时间的双馈风电场故障穿越策略
中国对风机低电压穿越与高电压穿越的要求见附录B 图B1[6]。当并网点电压在低电压穿越曲线以下或高电压穿越曲线以上时,风电机组才允许被切出。
为使风电机组不脱网运行,在低/高电压穿越中风电机组需要提供无功,其提供的无功电流值(标幺值)见附录B 式(B1)。低电压运行时需输出无功功率,高电压运行时需吸收无功功率。
4.1 计及风机自身与SVG 无功出力的无功补偿策略
系统发生低电压故障时,要求风电场有无功支撑能力,系统中的无功功率需求由双馈风机与SVG共同提供,从而使得并网点电压稳定在安全运行的区间。在风电场无功需求已知的情况下,研究双馈风机转子侧换流器、网侧换流器与SVG 的无功出力情况。
由第2 章分析可知,优先利用转子侧变流器控制定子为系统提供无功,其次用网侧换流器提供无功,最后由SVG 提供。当系统总无功需求量Qref低于转子侧换流器的无功功率极限Qsmax时,则全部无功需求由转子侧换流器提供;否则,其提供最大无功功率输出Qsmax,再由网侧换流器提供无功。若网侧换流器提供无功极限Qcmax后仍不能满足系统的无功功率需求,则剩余无功需求由SVG 提供。
但这种分配情况仍存在过电压的可能,由第3章分析可知,转子侧换流器控制的定子无功控制带宽要比网侧换流器与SVG 的控制带宽低。因此,在故障清除、电压恢复的时刻,转子侧换流器的无功出力跟随其无功参考值的速度较慢。
4.2 计及保护动作时间的无功补偿策略
在系统发生故障后,保护装置会快速动作于断路器以清除故障。由前文分析可知,风机转子侧换流器无功出力(指的是转子侧换流器控制的风机定子无功输出)极限最大,在现有策略中一般作为主要的无功补偿元件。但其无功输出对参考值的跟踪响应速度慢,在故障清除后无法快速将无功降低到零,是导致系统无功过剩、出现暂态过电压的主要原因。
因此,本文提出将风机转子侧换流器无功出力参考进行反时限设计,即离保护动作时间(包含断路器跳闸时间)越近,转子侧换流器的无功功率参考值越小,剩余缺额分配给网侧换流器和SVG。在该设计参考下,风机转子侧换流器无功输出能够随着接近故障清除时刻而逐渐降低,从而保证在故障清除后各无功补偿设备的无功出力能够快速降低(风机网侧换流器、SVG 的无功响应速度很快)。此外,考虑到主保护拒动的可能性,需考虑该情况下无功补偿与后备保护动作时间之间的协调配合。若判定出主保护未动作,转子侧换流器无功参考值初始量恢复为无功出力极限值,然后再进行反时限设计。上述的转子侧换流器无功出力参考Qs2max反时限设计可具体表示为:
式中:t=0 为故障发生时刻,此时风机转子侧换流器的无功出力为Qsmax;tp1为主保护及断路器动作时间之和(根据典型值给出);tp2为后备保护及断路器动作时间之和。设Qsref、Qcref、Qsvgref分别为风机转子侧换流器、网侧换流器及SVG 的无功功率指令值,Qsmax、Qcmax、Qsvgmax分别为转子侧换流器、网侧换流器与SVG 的最大无功输出能力,则计及保护动作时间的无功协调控制流程如图2 所示。在tp1时刻判断主保护是否动作,若检测到电压恢复(U≥0.9 p.u.且持续一段时间tdelay),说明此时主保护动作;否则主保护拒动,按照后备保护动作时间重新进行无功曲线设计。
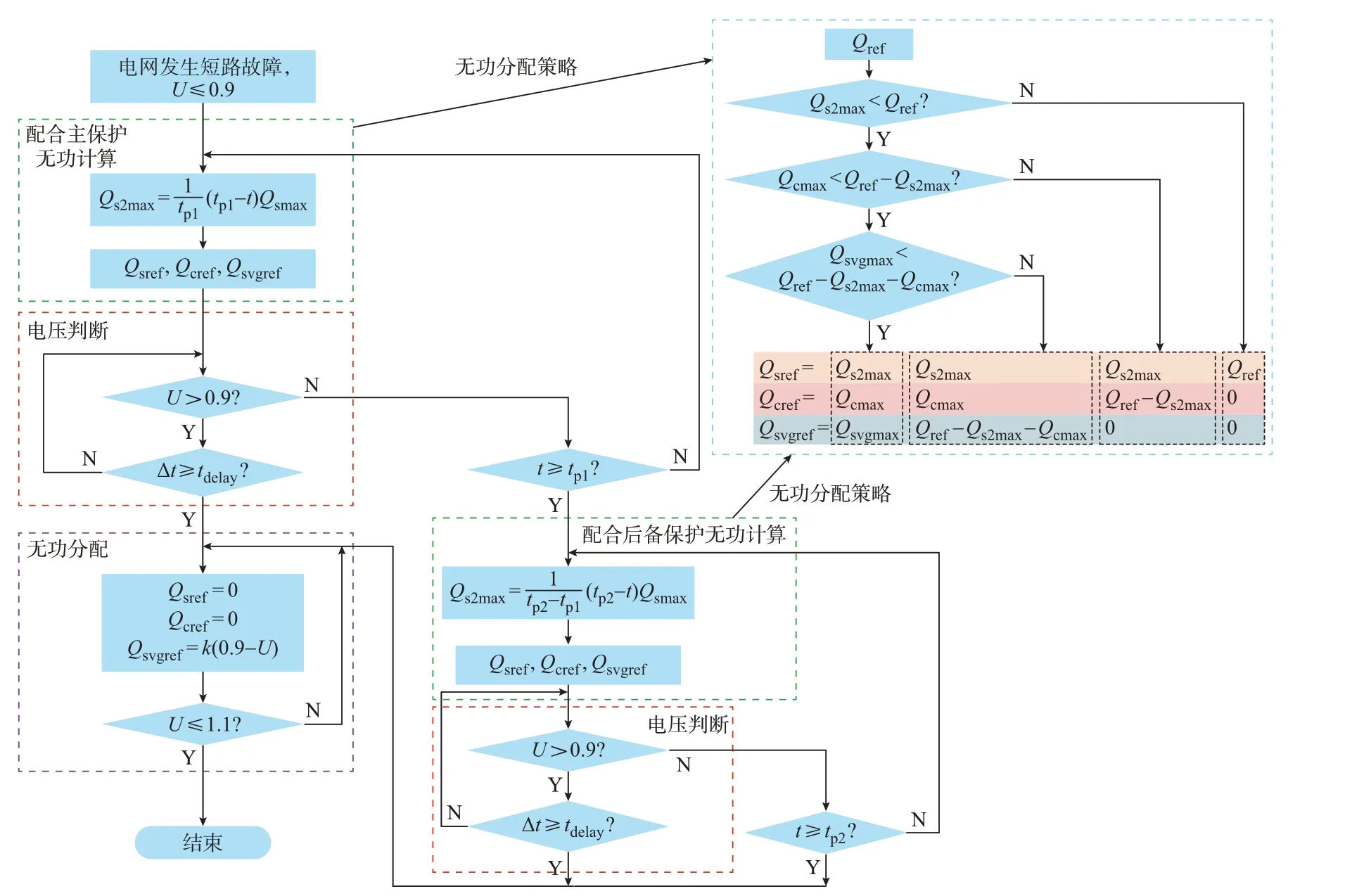
图2 计及保护动作时间的无功协调控制流程Fig.2 Reactive power coordination control process considering protection operation time
与4.1 节中的无功功率分配策略相比,所提方法同样优先发挥转子侧换流器的无功输出能力,但其无功功率参考值进行反时限设计,随着靠近保护动作时间而逐渐减小。其次,该方法将无功分配给网侧换流器与SVG。这种分配方法可以在故障期间使得风机转子侧换流器输出的无功功率随时间逐渐减小,网侧换流器与SVG 输出的无功功率增大。考虑到转子侧换流器无功响应速度慢、网侧换流器与SVG 的无功响应速度快,在故障清除后能够减小系统盈余无功。
虽然在故障清除时刻转子侧的无功功率参考值已经为0,但是由于其无功响应速度不是很快,实际仍旧在发出少量无功功率。因此,考虑在电压恢复阶段对SVG 的无功功率参考值曲线进行设计,使得SVG 在此阶段吸收无功功率,从而减小过电压。具体电压区间SVG 无功功率参考值Qsvgref1设计曲线如下:
在低电压故障阶段,SVG 的无功功率参考值按照前面所述的分配方式进行分配;在电压恢复后,SVG 根据式(14)吸收更多无功功率,从而更有效地降低过电压程度。
5 仿真验证
5.1 仿真模型
为了验证上文所提出无功补偿策略的可行性,本文在实时数字仿真(RTDS)平台中搭建双馈风电场并网系统见附录C 图C1,仿真实验平台见附录C图C2。所建立的仿真模型中,风电场共有60 个1.55 MW 双 馈 风 电 机 组,220 kV 的 输 电 线 路L为90 km。在35 kV 母线处并联SVG,容量为60 Mvar。
系统具体仿真参数见附录C 表C1。在此基础上,分别对主保护动作、主保护拒动后备保护动作以及考虑保护动作时间不确定性的情况进行仿真,对比验证了本文所提方法和传统方法在过电压抑制方面的性能。
5.2 仿真分析
以下仿真算例中均设定风电场并网高压送出线路发生三相短路,故障距离为15 km。
5.2.1 不同无功补偿策略的效果对比分析
设定故障时刻为0.4 s,故障后0.1 s 主保护动作以切除故障。为验证本文设计方法的有效性,将定电压无功补偿、常规无功分配策略、本文所提无功分配策略进行对比。其中,定电压无功补偿策略为SVG 与双馈风机网侧换流器在故障期间均为定电压控制[29-30];常规无功分配策略为4.1 节所述依照总无功需求依次分配给转子侧换流器(用于控制定子无功出力)、网侧换流器、SVG 进行无功补偿;本文所提无功分配策略为计及保护动作时间的双馈风机与SVG 的协调控制策略。并网点电压仿真结果如图3 所示,直流母线电压、无功出力与有功出力仿真图见附录D 图D1 至图D3。
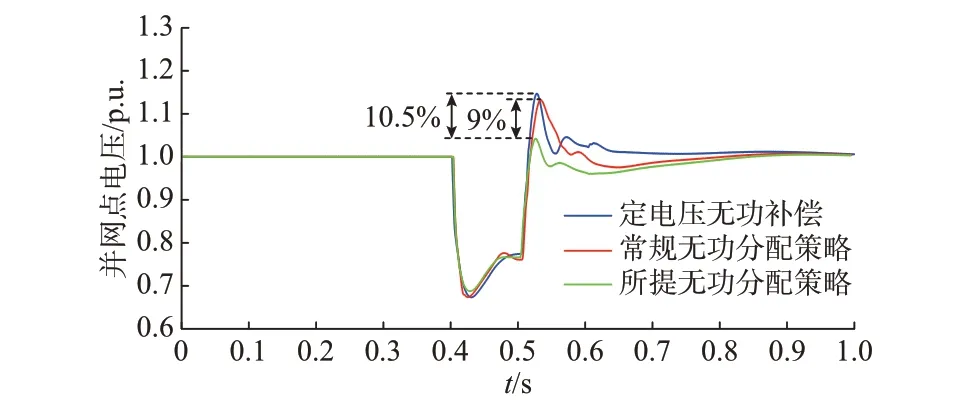
图3 主保护动作时不同控制策略下的电压对比Fig.3 Comparison of voltages under different control strategies when main protection operates
1)基于定电压控制方法仿真分析
如图3 所示,在定电压无功补偿方式下,故障期间并网点电压提升至0.760 p.u.,然而在故障清除以后,电压升高至1.148 p.u.,产生过电压现象。这是由于在并网点电压恢复瞬间,PI 控制器的输入电压变化量,即参考值与实际值的差值很小,因而PI 控制器的输出很小,导致无功电流变化不快。在电网电压恢复瞬间,会使得无功功率出现明显过冲现象,导致无功功率过剩。
2)双馈风机与SVG 协调控制仿真分析
如图3 所示,采用常规无功分配策略进行无功补偿时,故障清除以后,由于转子侧换流器无功撤回速度过慢,使得系统中有剩余无功功率,电压升高至1.133 p.u.。由附录D 图D2 可知,转子侧换流器所控制的定子无功出力是逐渐增大的,这是因为定子侧无功功率的响应速度较慢,最初SVG 所分配到的无功功率值较大,其无功出力先增大。当定子无功出力增大后,分配给SVG 的无功功率将会有所减小,SVG 的无功功率先增大后减小。
3)计及保护动作时间的双馈风机与SVG 协调控制仿真分析
如图3 所示,采用本文所提控制策略时,在故障期间并网点电压跌落至0.760 p.u.,仍可在故障期间提高并网点电压,在故障清除后,并网点的电压最高值为1.043 p.u.。以额定电压为基准,在故障清除、电压骤升期间,与定电压无功补偿策略相比,并网点电压降低了10.5%;与常规无功分配策略相比,并网点电压降低了9%。
由附录D 图D2 对各补偿元件的无功出力进行分析可知,本文所提方法能够使得定子侧输出无功功率有所减小,并且离保护动作时间越近,输出越小,从而使得分配给网侧换流器及SVG 的无功功率增大,因其无功响应速度快,有效减小了因转子侧换流器的无功响应速度慢而引起系统无功功率的盈余。在故障清除后的高电压阶段,SVG 根据其无功参考值能够吸收一定的无功功率,抑制了过电压。由图D1 可知,本文所提策略在故障清除后也可有效抑制直流母线电压的过电压。
5.2.2 保护拒动时不同无功补偿策略的效果对比分析
设定故障时刻为0.4 s,故障后0.1 s 主保护拒动而未切除故障,经过0.4 s 后线路后备保护动作,故障被切除,故障总持续时间为0.5 s。并网点电压仿真结果如图4 所示,直流母线电压、无功出力与有功出力仿真图见附录D 图D4 至图D6。
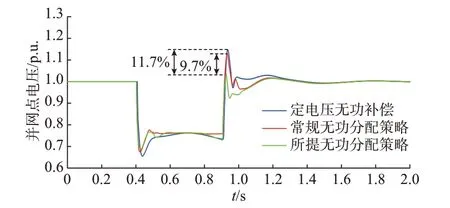
图4 后备保护动作时不同控制策略下的电压对比Fig.4 Comparison of voltages under different control strategies when backup protection operates
如图4 所示,采用3 种策略时,故障期间并网点电压均可提升至0.763 p.u.左右,在低电压阶段的无功补偿能力基本一致。本文所提方法在故障清除以后可使得并网点电压最高值为1.031 p.u.,以额定电压为基准,与前两种策略相比,并网点电压分别降低了11.7%和9.7%,有效地抑制了过电压现象的发生。
如附录D 图D5 所示,对各补偿元件的无功出力进行分析可知,线路故障时间持续0.1 s 后,主保护应动作跳开,但在某些原因而导致保护拒动的情况下,需要后备保护动作切除故障,从而保证系统的安全。采用本文所提策略,线路故障时间持续0.1 s 后主保护拒动。此时,转子侧换流器的无功功率参考值已变为0,其控制的定子实际无功出力减小。但此时故障依旧存在,为了保证风机的低电压穿越,仍需要定子侧提供无功功率。因此,令转子侧换流器的无功功率参考值变为其无功极限值,实际控制定子无功出力增加,又为了减小其响应时间过慢而导致的无功盈余,离后备保护动作时刻越近,其输出的无功功率逐渐减小,剩余无功需求分配给网侧换流器与SVG,在此情况下仍可以减小无功盈余。
5.2.3 考虑保护动作时间不确定性时不同无功补偿策略的效果对比分析
本文所提方法按照主保护与后备保护的动作时间分别为0.1 s 与0.5 s 进行无功功率参考值曲线的设计。考虑到实际中保护和断路器的动作时间有一定的不确定性,在本文提出方法中若检测到电压上升,即保护动作故障清除,此时会使得转子侧换流器、网侧换流器的无功功率变为0,令SVG 按照式(14)所示给定无功功率参考值。此时,尽管保护动作时间(包含断路器动作时间)有一定的不确定性,但本文所提方法仍对过电压限制的抑制有一定的效果。
1)故障后经0.09 s 保护动作时的仿真分析
设定故障时刻为0.4 s,经过0.09 s 保护动作切除故障,对3 种策略进行仿真验证,并网点电压仿真结果如图5 所示,直流母线电压、无功出力与有功出力仿真图见附录D 图D7 至图D9。如图5 所示,采用本文所提方法时,在故障清除后,并网点的电压最高值为1.045 p.u.。以额定电压为基准,在故障清除电压骤升期间,与定电压无功补偿策略相比,并网点电压降低了10%;与常规无功分配策略相比,并网点电压降低了8.6%。如图D8 所示,尽管在故障清除时刻转子侧换流器的无功功率参考值并没有降低至0,但在故障期间其无功功率的输出相比于常规无功分配策略也是有所减小的,且在故障清除时刻会将其参考值设置为0,对过电压现象也会有所抑制。
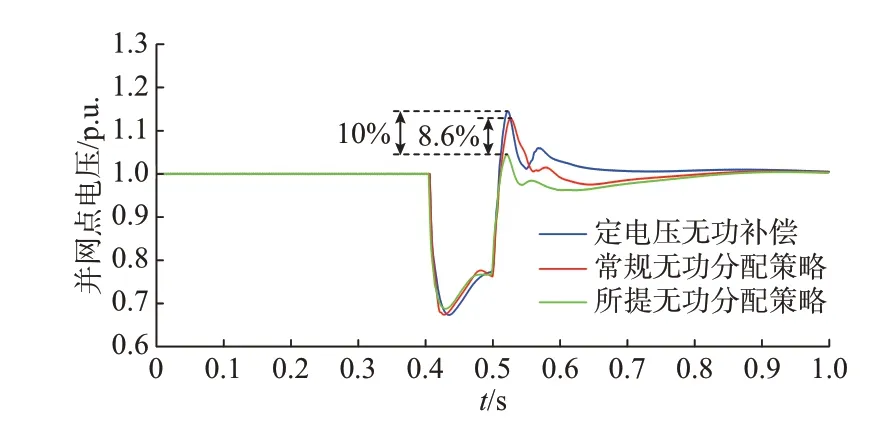
图5 动作时间为0.09 s 时不同控制策略下电压对比Fig.5 Comparison of voltages under different control strategies with operation time of 0.09 s
2)故障后经0.3 s 保护动作时的仿真分析
设定故障时刻为0.4 s,经过0.3 s 保护动作切除故障,对3 种策略进行仿真验证,并网点电压仿真结果如图6 所示,直流母线电压、无功出力与有功出力仿真图见附录D 图D10 至图D12。
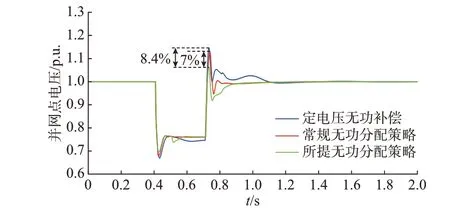
图6 动作时间为0.3 s 时不同控制策略下电压对比Fig.6 Comparison of voltages under different control strategies with operation time of 0.3 s
如图6 所示,采用本文所提方法时,在故障清除后,并网点的电压最高值为1.062 p.u.。以额定电压为基准,在故障清除电压骤升期间,与定电压无功补偿策略相比,并网点电压降低了8.4%;与常规无功分配策略相比,并网点电压降低了7%。如附录D图D11 所示。在此仿真算例中,保护动作时间为0.3 s。此时,定子无功功率参考值已随着保护动作时刻的接近逐渐减小,在故障清除时刻,按照无功功率参考值设计曲线,其参考值虽未减小至0,但检测到电压上升后立刻使其参考值切换为0。相比于常规控制策略,其定子侧实际输出的无功功率仍是有所减小的。此时,对于减小系统故障清除后的盈余无功功率的问题仍有所改善。
综上,本文所提方法在保护动作时间不确定的情况下,依然有较好的抑制过电压现象发生的作用,有一定的鲁棒性。
需要指出的是,本文所提方法是针对故障程度不是很深的情况,主要解决的是抑制故障清除后的暂态过电压问题,严重故障阶段下的故障穿越问题(属于低电压穿越问题)不是本文研究的重点。若系统发生严重故障,虽然仍可以提高低电压穿越能力,但此时系统所提供的最大限度无功功率值无法满足风电机组的低电压穿越需求,这种情况下需要与硬件电路相配合,如增加撬棒电路、直流侧卸荷电路等。
6 结语
风电场并网线路故障以后,除了故障期间的低电压穿越问题,在故障清除以后由于电力电子设备的响应延时,还会导致过电压问题。本文在双馈风电场并网系统不同无功补偿设备(主要包括双馈风机的转子侧换流器、网侧换流器以及SVG)无功补偿极限和动态响应速度分析的基础上,提出了计及无功补偿设备动态响应能力及保护动作时间的无功补偿协调配合策略。主要结论如下:
1)为充分发挥双馈风机的无功补偿能力,减小对附加无功补偿装置的需求,在故障期间需要转子侧换流器和网侧换流器提供无功功率。其中,转子侧换流器控制的定子无功补偿能力强,但响应速度较慢;网侧换流器无功补偿能力弱,但响应速度快,与SVG 无功补偿响应时间在一个量级。
2)提出了计及线路主后备保护动作时间的双馈风机与SVG 的无功协调控制策略。故障发生以后,将系统的无功需求优先分配给风机转子侧换流器,其补偿无功参考值随着故障发展时间按反时限下降进行设计。剩余的无功缺额先后分配给风机网侧换流器和SVG。此外,在电压抬升以后,SVG 吸收剩余的无功功率。
3)本文所提方法充分考虑了不同无功补偿设备的补偿能力和响应速度,通过与保护动作时间的协调配合,在保证故障期间实现低电压穿越的前提下,充分考虑无功补偿设备的响应传递延时,通过无功补偿参考值的预先调整,实现故障清除后无功出力的快速降低。此方法属于预防控制策略,抑制了无功过剩导致的暂态过电压,降低风电机组的高电压脱网风险。
本文针对故障跌落程度不是很深的情况,未考虑严重故障下的故障穿越问题,下一步研究将考虑在严重故障情况下与硬件电路如撬棒电路等配合的双馈风电场故障穿越策略。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
