基于EMD-DESN的无人机集群航迹目的地预测
2024-01-16薛锡瑞黄树彩韦道知吴建峰
薛锡瑞, 黄树彩, 韦道知, 吴建峰
(空军工程大学防空反导学院, 陕西 西安 710051)
0 引 言
近年来,无人机集群在现代战争中起到了愈发重要的作用,已成为国防安全的新兴威胁。美国在2000年就启动了无人机集群空中战役研究计划[1],并从2014年开始相继启动了“Perdix”“Locust”以及“Gremlins”项目,先后研制出用于集群作战的“灰山鹑”“郊狼”和“小精灵”等型号无人机[2]。无人机集群丰富的作战样式极大地改变了传统作战体系的对抗方式。敌方目标的价值不再从属于任何一个无人机成员,而完全依靠集群整体所“涌现”的能力存在,这使传统防空作战中重点抗击高价值、高威胁度目标的策略失效。
防空作战中,为有效抗击无人机集群,需要对群目标意图进行实时准确的识别和预测。群目标意图识别与预测是指对作战区域内目标作战集群所要达成的某个目的或作战计划的自动评估和预判,是态势分析的重要功能,属于战场数据融合体系的高层处理部分[3-5]。无人机集群航迹目的地预测是群目标意图预测的重要方面,是提前优化防空部署的前提。然而,由于无人机集群在进攻作战中运动智能化程度高,集群内部存在协同交互,集群整体又存在合群、分群和再组织等运动模式[6],致使集群航迹建模困难,给精确预测无人机集群目的地带来了很大难度。
目前,对内部具有交互作用的集群航迹建模主要遵从由Reynolds提出的分离、调整和聚合3个协同规则[7],并有Viscek模型[8]和Couzin模型[9]等一致性控制模型[10]先后提出。Viscek模型将协同作用归因于目标速度方向的平均化调整,Couzin模型则讨论了集群在有效引导和群体决策下的分群现象。然而,在异构集群情况下,仅由上述规则描述的集群易因成员位置的分散而出现破裂现象。
随着集群系统的研究逐渐由低阶系统转到一般系统,由无领导者转向有领导者,集群系统开始采用编队跟踪控制[11]、编队合围控制等协同控制方法[12]。Li[13]等提出一种全分布式控制器,实现了异构集群的编队合围控制。Olfati-Saber[14]在Reynolds规则下,设计增加了虚拟领导项,提出Olfati-Saber模型,解决了集群破裂问题。Olfati-Saber模型因其实用性更强,在无人机集群的仿真和实物控制中都有应用[15]。本文以Olfati-Saber模型为基础,考虑实际无人机集群作战过程中指挥控制指令的产生和下达过程,试图结合作战任务改进虚拟领导项,更真实地模拟无人机集群作战航迹。
在无人机集群作战意图推断方面,已有学者开展了相关研究[16]。传统群目标意图预测主要在贝叶斯网络推理框架[17-18]下展开。贝叶斯推理具有能够应对传感器数据固有的随机不确定性和意图识别固有的语义模糊性,支持推理网络参数的再学习等优点[19-20]。文献[21]中应用多实体分层贝叶斯网络给出了多域作战下群目标意图推理方案。然而贝叶斯推理不可避免地需要利用目标实体先验统计信息,而作为防御方却难以获取。因此,利用机器学习方法在有限航迹序列中挖掘特征信息进而预测目的地,成为先验信息难以获取情况下可供选择的目的地预测方法之一。
在众多机器学习方法中,回声状态网络(echo state network, ESN)因结构简洁、训练高效而被广泛应用于时间序列预测[22],但其对复杂时序的预测能力有一定欠缺。据此,有学者提出深度ESN[23-24](deep ESN, DESN)模型。DESN在挖掘序列特征进而预测序列趋势中发挥了较好的作用,已逐渐成为基于位置的城市服务计算的前沿解决方案之一[25]。同时,在解决前沿性现实问题[26-27]中,DESN具有较循环神经网络(recurrent neural network,RNN)、长短期记忆(long-short term memory,LSTM)神经网络等更好的预测性能。本文尝试将DESN应用于解决无人机集群作战过程中的目的地预测问题。
然而,考虑到协同交互作用和运动噪声的影响,无人机集群航迹具有强烈的非平稳性,这对DESN的应用带来了很大影响。对航迹信号去噪平滑将有助于缓解该问题。经验模态分解(empirical mode decomposition, EMD)是Huang等提出的一种信号分析方法[28],它的目的是将一个信号分解成离散模式,进而将非线性、非平稳序列进行平稳化处理。文献[29]仅依靠EMD将信号分解为不同频域的固有模态分量,去除含噪高频分量,但该方法存在模式混叠问题。文献[30]基于集合EMD方法去噪,出现了重构信号信噪比偏低的问题。文献[31]提出一种互补集合EMD结合改进小波阈值的去噪算法,有效提高了激光雷达信号的信噪比。本文充分分析航迹波动性的来源,受文献[32]启发,应用EMD结合中心频率法提取航迹信号中的平稳性分量,重构航迹序列并将其应用于DESN训练,获得了更好的目的地预测结果。
本文以无人机集群航迹目的地预测为研究内容,给出了基于EMD-DESN算法的解决方案。与现有算法不同,本文所提算法的主要贡献体现在以下3个方面。
(1) 基于作战任务改进Olfati-Saber集群运动模型,使其更准确地反映无人机集群进攻作战过程。
(2) 考虑到航迹的非平稳性特点,应用EMD获得航迹的平稳性分量,并结合中心频率法重构无人机航迹,消除了航向噪声对目的地预测的影响。
(3) 设计了滑窗结构,利用滑窗内重构航迹对DESN进行训练。训练好的网络在测试数据上实现了较对比算法更好的航迹目的地预测效果。
1 基于改进Olfati-Saber模型的无人机集群协同作战描述
1.1 Olfati-Saber模型基本原理
依据Reynolds提出的分离、聚合、速度匹配的集群行为原则,Olfati-Saber集群运动模型增加了虚拟领导项,集群内所有成员均可获取虚拟领导项的位置和速度信息。将集群无人机简化为质点模型后,在基本Olfati-Saber模型框架下,集群成员i有如下运动方程:
(1)
(2)
式中:qi(t)和pi(t)分别为t时刻无人机i的位置和速度向量;ui(t)为t时刻无人机i的控制输入。
依据集群协同行为原则,t时刻控制输入ui(t)的设计如下:
(3)


(4)
式中:‖·‖σ表示σ范数,其计算方式为
(5)
式中:固定参数ε∈(0,1)z=qj-qi。
‖qj-qi‖σ表示无人机j与无人机i之间的σ范数距离。Ni(t)表示无人机i可实现信息交互的邻域内其他成员的集合。邻域可采用欧几里得距离或拓扑距离[33-34]确定。

Ψα(·)定义如下:

(6)
式中:z=‖qj-qi‖dα为d的σ范数距离的转化形式,dα=‖d‖σ;d为集群稳定后无人机间的期望距离。
Φα(·)为无人机之间的势场力函数,当无人机i和无人机j的距离小于距离阈值时,两者之间产生引力,促使集群聚合;当两者间距大于距离阈值时,产生斥力,防止碰撞。Φα(·)的表达式如下:
(7)
式中:rα=‖r‖σ为有限截止点,r表示无人机可发生信息交互的最大距离;ρh(z)是值域在[0,1]之间的平滑标量函数[35],其引入使势场力具有有限的极值,并使空间邻接矩阵更加光滑,其定义如下:
(8)
Φ(z)为非均匀的s型函数,定义如下:
(9)


(10)
式中:当i=j时,aij(q)=0,否则aij(q)=ρh‖qj-qi‖σ/rα,aij(q)构成空间邻接矩阵。

(11)
式中:c1,c2为虚拟领导项系数,赋值过程中可仅考虑与虚拟领导项的位置匹配或速度匹配而令c1=0或c2=0。
1.2 虚拟领导项设定
如图1所示,以红方无人机集群攻击蓝方保卫要地为例,无人机集群作战过程可分为远程释放、密集飞行、分群飞行和协同作战4个阶段。其中,虚拟领导项的运动信息即为无人机集群的运动指令,通常由担任指挥控制系统的红方集群载机或预警机给出。

图1 无人机集群作战过程Fig.1 Unmanned aerial vehicle cluster operation process
作战过程中,若仅考虑集群成员与虚拟领导项的速度匹配而令c1=0,则t时刻虚拟领导项的速度大小‖pl(t)‖和航向矢量nl(t)分别为
(12)
nl(t)=[cos(θ(t)),sin(θ(t))]T
(13)
式中:Tt表示任务执行总时间;ql(t)表示t时刻虚拟领导项的空间位置,因不考虑位置匹配,故将其选定为集群的空间几何中心位置;qd(t)表示t时刻目的地位置;γ(t)为速度大小补偿参数,满足γ(t)≥1;θ(t)为t时刻指控系统给出的虚拟领导项航线与x轴的航向指令。

Rθ(t)=δ‖ql(t)-qd(t)‖2
(14)
式中:δ为噪声方差控制系数。由于航向噪声的影响,虚拟领导项向目的地飞行的实际速度始终为pl(t)的一个分量,因此需要增加γ(t)系数进行补偿。因γ(t)的大小与Rθ(t)有关,可得γ(t)=fγ(ql(t)),求解fγ(ql(t))可得如下结果:
(15)

2 基于EMD的航迹平滑
2.1 EMD基本原理
为缓解噪声对目的地预测的影响,本节利用EMD算法对航迹信号去噪。与小波分解和傅里叶分解相比,EMD仅依靠序列本身的时间尺度特征即可将其分解为有限个本征模函数(intrinsic mode function, IMF)和残差而不需要设定基函数等先验。同时,算法运行所需参数和先验信息更少,使EMD算法具有更好的适应性。IMF需满足两个条件:函数在整个时间范围内,局部极值点和过零点的数目必须相等或最多相差一个;在任意时刻点,局部最大值的上包络线和局部最小值的下包络线均值必须为零。


(16)
(17)


(18)
(19)
(20)
2.2 中心频率法航迹分段重构

(21)


(22)

(23)
(24)

(25)

(26)

3 DESN航迹目的地预测
3.1 目的地预测流程
本文提出的基于EMD-DESN无人机集群航迹目的地预测流程如图2所示。较基本DESN算法的本质不同在于,本文算法利用EMD对航迹信号去噪后,向DESN网络输入的是去噪后的分段重构航迹。

图2 基于EMD-DESN算法目的地预测流程Fig.2 Destination prediction process based on EMD-DESN algorithm
3.2 DESN基本原理
DESN将回声状态网络与深度学习思想相结合[36],在回声状态网络基础上增加多个储层结构作为隐含层,使DESN能映射更加复杂的时序特性,其基本结构如图3所示。

图3 DESN结构Fig.3 DESN structure
算法流程如下:获得的改进Olfati-Saber模型用于产生无人机集群运动原始数据。经过航迹分段,对分段航迹的速度序列进行EMD分解,计算各阶IMF的中心频率,并根据设定的频率阈值选择重构分量,重构速度序列,进而重构航迹序列。将重构航迹序列输入DESN进行训练和目的地预测。
式(27)~式(30)为DESN的数学模型:
(27)
(28)
(29)
y(n)=g(Woutx(n))
(30)

3.3 无人机集群目的地预测方法
3.3.1 DESN目的地预测方法
采用DESN模型对无人机集群航迹目的地进行建模预测的方法如图4所示。

图4 DESN目的地预测方法Fig.4 DESN destination prediction method
由图4可知,本文在获知重构航迹上设置滑窗结构,滑窗长度为lw,滑动距离为dlw。对于已获知的无人机航迹,首次预测的最短航迹长度需大于等于滑窗长度。随着获取新的航迹点,当新增航迹点满足滑窗滑动距离要求时,滑窗滑动更新预测和训练数据,进行第2次DESN目的地预测。若第M次预测后,航迹再无新增点,则完成整条航迹上的全部目的地预测。
3.3.2 DESN训练和测试过程

Wout=YXT(XXT+αE)-1
(31)
式中:α表示一个较小的正数[37];E表示单位矩阵。
4 实验验证
4.1 集群作战场景想定
本文将提出的EMD-DESN模型应用于无人机集群作战中航迹目的地的预测,为验证所提方法的有效性,在二维平面内构建以下集群飞行场景。视场内无人机数量N=15,属于同一集群的成员间可发生交互。集群在[0,20]×[0,20]m2范围内投放,x,y方向的初始速度均为0 m/s,运动总时间Tt=100 s,采样间隔τ=0.1 s,即采样频率为fsp=10 Hz,算法运行1 000步。设置目的地数量Nd=5,目的地位置如表1所示。

表1 目的地位置Table 1 Destination location

集群作战过程中,集群按照任务指令可能改变目的地位置,还可能产生分群行为,仿真中考虑了这一现象。为保证航迹的连续性,设置集群每次确定目的地位置后,至少运动25 s,才可再次改变目的地位置。若发生分群,子群中最少有3个成员。仿真中,子群成员数目与目的地改变时刻随机确定。图5和图6给出了一次集群运动仿真结果。

图5 集群航迹仿真结果Fig.5 Cluster trajectory simulation results

图6 集群速度收敛Fig.6 Cluster speed convergence
由图5和图6可知,集群随机投放后,受到协同作用影响,各成员开始调整运动速度,逐渐形成3个集群。在稳定飞行一段时间后,35 s左右,1个集群发生分群,一部分子群仍飞向原目的地D2,另一部分最终改变目的地为D4。当各集群运动速度收敛后,集群形成稳定的结构,以一致的速度向目的地飞行。飞行过程中,大的航迹弧线是由于目的地的改变而产生,而小的航迹波动则是来源于航向噪声的影响。在运动前期Rθ(t)较大,航向不确定性较大,后期Rθ(t)减小,航迹更加平滑。
4.2 EMD航迹平滑结果及分析

以集群C2为例,选择一架无人机在时间段45~60 s的速度序列进行EMD,并通过功率谱计算得到各IMF的中心频率。图7给出了对其速度序列的EMD结果,表2展示了各阶IMF的中心频率,图8展示了各阶IMF的功率谱。

表2 各阶IMF中心频率Table 2 IMF center frequency of each order Hz

图7 速度序列EMD分解结果Fig.7 EMD decomposition results of speed series

图8 各阶IMF功率谱Fig.8 IMF power spectrum of each order
图7中,从上到下给出了原始速度序列、各阶IMF以及残差项。图8中,给出了各阶IMF的功率谱。可以看出,原始速度序列受航向噪声的影响具有很强的非平稳性,而经过分解后的残差项滤除了噪声影响,保留了原始速度序列的基本趋势,但却丢失了较小时间尺度的部分细节。对比各阶IMF可见,IMF1和IMF2包涵了大多高频噪声分量,中心频率在1 Hz以上,其能量在103量级,IMF3和IMF4中心频率在0.5 Hz左右,能量可达104量级。而第5、6阶IMF所含能量较少,中心频率较低。
由表2数据,综合考虑航迹全程各阶IMF中心频率值,设定中心频率阈值fts=0.15 Hz进行航迹重构过程。重构集群C2运动轨迹如图9所示。

图9 航迹C2重构结果Fig.9 Trajectory C2 reconstruction results
可以看出,相较原始航迹,重构后的运动轨迹更加平滑。集群航向噪声对集群航迹影响减弱,使DESN可以更好地提取航迹序列信息。需要指明的是,fts对去噪效果有一定影响,需根据各IMF功率谱比较确定。
4.3 EMD-DESN目的地预测结果及分析
按第4.1节的设定,仿真产生100组集群运动场景,共获得1 500条航迹。所有航迹中,80%用于训练,20%用于测试。设定滑窗长度lw=100,滑动距离dl=50,则整条航迹上共需要DESN进行19次预测。设置每个DESN的网络层数L=6,每个储层中神经元的个数Nn,l=200,每层泄露参数a(l)=0.9。分别利用本文提出的EMD-DESN算法以及EMD-ESN算法和基本DESN算法预测集群航迹目的地。为保证ESN与DESN的神经元个数相同,设置ESN的神经元个数Nn=1 200。
4.3.1 准确度
采用均方根误差(root mean square error, RMSE)衡量算法的目的地预测准确度[38],定义如下:
(32)


图10 全程目的地预测RMSEFig.10 Whole journey destination prediction RMSE
图10中,图线颜色表示EMD-DESN算法目的地预测RMSE的大小。由图10可知,随着无人机逐渐靠近目的地,尽管算法对目的地的预测存在波动,但RMSE的整体趋势是逐渐减小的。部分未发生目的地变更的集群,在运动初始阶段,算法即能很快确定目的地位置,并一直保持较低的RMSE,如C2所示。而发生目的地变更的集群,随着目的地变更机动的完成,算法也能较快锁定新的目的地位置,RMSE逐渐减小,如C1所示。目的地处红色虚线圆是以目的地为圆心,半径为300 m的圆,上述5个圆可以较好地区分所属目的地,实验中将该圆称作目的地范围。若明确无人机集群可能打击的目的地后,实际预测过程中,仅需确定目的地预测值落入哪个目的地范围即可确定航迹目的地。若某航迹点上的目的地预测值的均值在真实目的地的范围内,即预测值均值误差小于等于300 m,则称该航迹点上的预测为正确预测。
3种算法对上述10个集群航迹目的地预测的平均RMSE如图11所示。表3给出了各算法在典型时刻预测的平均RMSE。

表3 各算法RMSETable 3 RMSE of each algorithm
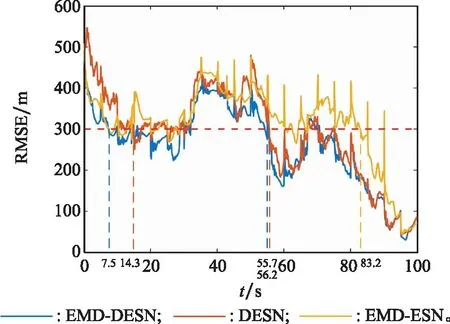
图11 平均RMSE比较Fig.11 Average RMSE comparison
由图11可知,3种算法的RMSE具有基本一致的变化趋势。初始阶段,随着无人机集群向首次确定的目的地运动,3种算法均能预测出目的地位置,并在首次机动发生前,将平均RMSE降低到300 m左右。相较而言,EMD-DESN算法具有更好的预测效果,平均RMSE更低。集群发生机动后,平均RMSE均升高,随着机动的完成,RMSE又回归到较低水平,然而EMD-ESN在第二次机动发生后,未能及时锁定新的目的地。由表3可知,EMD的应用使各典型时刻DESN的目的地预测准确度均有所提升。由各典型时刻RMSE均值可知,EMD-DESN性能较基本DESN平均提升了13.2%。
4.3.2 时效性
在第4.3.1节中,基于预测值均值误差定义了正确预测的概念,各算法的时效性由实现正确预测的时刻表示。因RMSE与预测值均值误差计算方法的差异,由Holder不等式可知,正确预测的RMSE阈值≥300 m。然而,在上述滑窗设置下,多数航迹点上Z=2,且2个预测值数值接近,故取正确预测的RMSE阈值为下限300 m。
由于集群发生机动,由图11可知,有2次正确预测时刻产生,具体数值如表4所示。

表4 正确预测时刻Table 4 Correctly predicted time s
由表4可知,首次正确预测时刻EMD-DESN比DESN提前了6.8 s。50 s左右,部分集群机动完成,此时基于DESN的预测算法分别于56.2 s和55.7 s实现正确预测。70 s左右,部分集群再次发生机动,基于DESN的预测算法依然维持了较高正确预测比例,受影响较小,而ESN算法在第2次机动完成后的83.2 s才能稳定地正确预测。产生这种现象的原因在于,ESN没有较多的储存层,对无人机集群发生机动等复杂场景适应性较弱,且单层过多的神经元数量有时不仅不能起到更好的预测效果,还会因状态矩阵维数过大导致网络的数值稳定性低,泛化能力差,预测后期,EMD-ESN出现更多“突刺”状误差也说明了这一问题。
为进一步说明本文算法效果,对各次滑窗中,测试集所有集群目的地正确预测比例分析如图12所示。
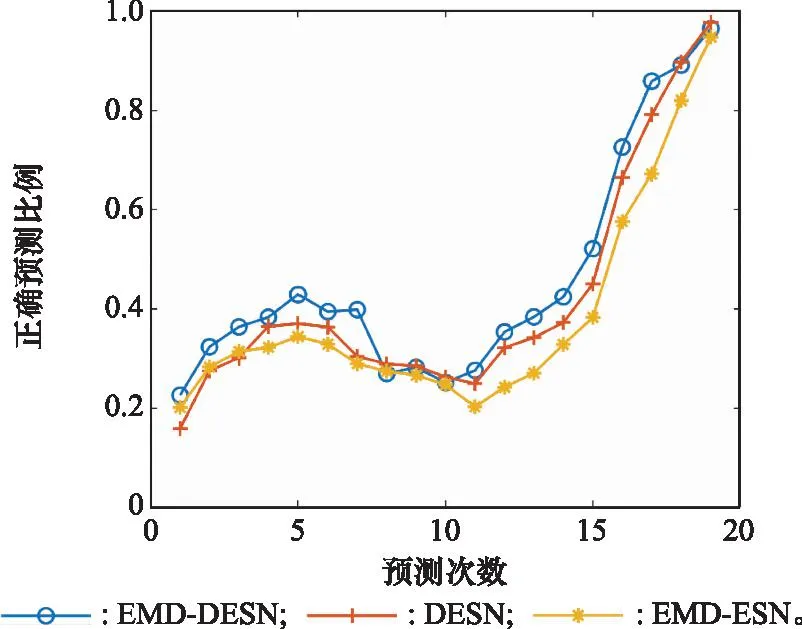
图12 目的地正确预测比例Fig.12 Proportion of correct prediction of destination
由图12可以看出,未发生目的地变更前,本文算法正确预测的比例在40%左右,随着机动的发生,第8次预测处,本文算法正确预测比例会降低到基本DESN算法以下。这是由于经过EMD算法航迹重构后,无人机集群发生机动的航迹处,重构航迹较真实航迹更平滑,导致重构航迹集群航向变化更加缓慢。然而,随着转向完成后,本文算法的正确预测比例提升速度更快。
5 结 论
本文针对无人机集群作战过程中航迹目的地的预测问题,提出了一种基于EMD-DESN算法的无人机集群航迹目的地预测方法。本文对基本Olfati-Saber模型进行改进,结合作战飞行任务对虚拟领导项进行优化,使集群飞行更贴近实际作战过程。在航迹目的地预测过程中,采用EMD算法重构集群速度-航迹序列,并在重构序列上应用DESN算法,取得了较EMD-ESN和基本DESN算法更好的预测效果。现阶段,对不同集群作战场景、不同样本集下的DESN参数的优化选择还有待深入研究。同时,为EMD方法自适应选择重构模态数以更好地区分噪声模态可进一步提升本文算法性能。
