时变多辐射源跟踪任务的时-频扫描方案评估方法
2024-01-16杨益川曹旭源史小伟张天贤
杨益川, 曹旭源, 史小伟, 余 晨, 张 伟,, 张天贤
(1. 电子信息控制重点实验室, 四川 成都 610036; 2. 电子科技大学信息与通信工程学院, 四川 成都 611731)
0 引 言
雷达、电子支援措施(electronic support measures, ESM)等传感器常被用于获取环境空间内的各种目标信息。目标信息获取可大致分为发现目标与跟踪目标两个方面,其对应性能可通过改善前端天线增益、后端处理器运算存储能力等硬件性能[1]、改进甚至采用新的信号信息处理算法[2-11]以及优化管控系统资源[12-22]等手段进行提升。其中,以提升ESM等无源传感器的辐射源目标跟踪性能为目标,通过各种手段优化配置调度时(如驻留时间、扫描周期等)、空(如天线指向及覆盖范围)、频(如工作频段覆盖范围、瞬时带宽等)等资源参数在近年来得到了研究人员的持续关注[19-23]。
以资源管控提升对ESM辐射源跟踪性能过程中,需依赖性能评估为资源优化调配提供反馈信息。举例来说,航母战斗群、战斗机编队等典型辐射源目标群会根据实时态势,对所辖不同辐射源的开关机状态(如电磁静默/交替开机等)、天线指向等进行动态调整,导致ESM方随时可能截获到新辐射源,并抽调资源对其进行跟踪。此时,ESM需实时准确评估系统当前资源条件对随机新任务的适应能力,才能合理调度资源,维持甚至优化跟踪性能。综上,本文利用时-频扫描方案的优化设计提升ESM稳定跟踪性能,对时变多辐射源跟踪场景下的传感器时间资源管理技术性能评估方法进行研究。
ESM设备的辐射源跟踪性能取决于截获概率、跟踪精度、目标容量等指标,将所有相关因素都纳入考虑会导致问题过于复杂。为简化起见,考虑ESM采用宽波束侦收信号,同时设备搭载平台处理资源充足,可保证截获、分选、定位等信号信息处理算法的性能满足要求。此时,可根据目标稳定跟踪所需的最低数据率要求,通过时-频扫描方案的优化设计管理调配时间资源,提升系统对时变多辐射源跟踪任务的适应能力[22]。在动态变化的多辐射源跟踪任务中,系统适应能力的评估主要存在如下两方面的困难。
一方面,评估需综合考虑辐射源目标的类型、数量等任务要素所导致的差异化性能需求。在实际情况中,不同辐射源搭载平台在运动速度、机动性等方面通常不尽相同,导致对其实现稳定跟踪所需要的数据率也存在较大差异。在多类型目标并存的场景下,仅利用对单一类型辐射源的稳定跟踪数量难以对系统适应能力进行全面评估。举例来说,跟踪高速辐射源(如机载火控雷达)所需数据率与耗时一般高于低速目标(如舰载雷达),对于新增辐射源目标,在仅有低速目标与同时包含高、低速目标两种情况下,相同时间内ESM系统对前者稳定跟踪的目标数量更多,但这不意味着前者性能更好。
另一方面,随着技术进步,辐射源编队会利用交替开机[17-19]、电磁静默[24]等方式增加ESM所面临的不确定性。具体地,任意时刻ESM方都有可能截获新辐射源目标,产生新的待执行跟踪任务,进而导致系统任务负担、资源余量等参数随之变化。针对该问题,性能评估需具备动态调整能力,在系统负荷(正在执行的任务等)、资源参数(可用资源的总量与分布等)变化的情况下,随之调整评估结论,准确反映系统对随机新增任务的适应能力。
上述两个方面的困难导致时-频扫描方案性能评估的问题建模与评估方法都较为困难。针对这些困难,首先在建模方面将时-频扫描方案优化建模为一个迭代式多目标优化问题;然后对于评估方法,本文根据帕累托优化理论,设计了一种基于可行域的ESM系统时-频扫描方案性能评估方法,最后通过一定的计算机仿真实验,对所提方法的有效性进行了验证。
1 时-频扫描方案优化数学建模
如前所述,时-频扫描方案优化数学建模主要面临两方面困难:一方面,辐射源类型多样性导致每批新截获到的多辐射源都可能分属不同类型,优化需要综合考虑各类辐射源的性能要求差异;另一方面,辐射源行为的随机性导致任务持续期间累计辐射源被截获数量、每批辐射源的截获时间等信息都难以确定。针对上述两方面困难,本文将时-频扫描方案优化建模为一种迭代式多目标优化问题。首先给出假设条件。
假设 1假设待优化的ESM设备工作于多目标跟踪模式,截获任务由其他设备承担。
假设 2综合系统设计难度、工程复杂性等因素,本文将ESM系统的瞬时带宽设定为不变的定值,同时不失一般性,考虑到在一个瞬时带宽覆盖范围内的辐射源跟踪任务可以进行合批处理,因此忽略任意单个瞬时带宽覆盖多个辐射源工作频段的情况。
假设 3假设系统可能需要跟踪的辐射源目标可根据历史数据、情报数据等信息分为K类。
在任意一批新辐射源被截获时,系统需跟踪的辐射源可分为既有与新增两部分。举例来说,对于第p阶段(即第p批和第p+1批新辐射源截获时间之间的时段),两部分辐射源数量可表征如下:
(1)
(2)

(3)

(4)
上述4元组在时-频二维空间形成的周期窗模型如图1所示(阴影部分)。
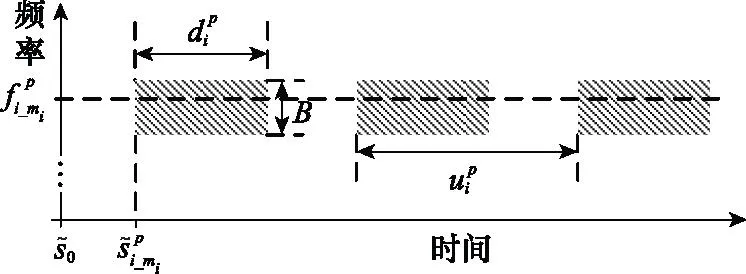
图1 4元组表征的时-频空间周期窗模型示意图Fig.1 Schematic diagram of time-frequency spatial periodic window model represented by four elements representation

(5)
式中:j=1和j=2分别代表首次和第二次回访占用的时段(后续回访则依次类推)。实际中,辐射源工作频率不可控,又假设瞬时带宽固定,因此周期窗的位置及形状由4元组中的时间参数确定。对于稳定跟踪的任意辐射源,其对应周期窗应满足下述限制条件。
首先,4元组所表征的不同辐射源跟踪任务对应周期窗所占用的时段不可重叠,亦即不同周期窗在时间轴的投影之间交集为空。
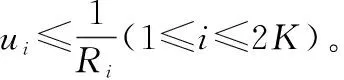
时-频二维空间大小受限的物理意义即为系统时、频资源总量有限,此时不同辐射源的稳定跟踪对系统的时、频资源需求之间存在发生冲突的风险(尤其是在任务较多、空闲资源较少的情况下),部分辐射源数量的增加或者数据率的提升,都会减少其他辐射源稳定跟踪的可用空间。为在有限时-频二维空间内排布尽可能多的周期窗,提升稳定跟踪辐射源的数量,需对所有辐射源稳定跟踪所占周期窗的位置和形状进行联合优化调整。据此,将多辐射源跟踪下的ESM时-频扫描方案优化描述为如下过程:在周期窗占用时段互不交叠且周期满足要求的前提下,通过优化不同辐射源跟踪回访4元组内的时间参数,调整其周期窗的位置与形状,尽可能将所有辐射源稳定跟踪所对应的周期窗排布于时-频空间,最大程度地提升ESM对不同时间截获的多类辐射源的稳定跟踪数量。图2通过一个简单例子给出周期窗安插原理示意图(假设ESM正稳定跟踪1个辐射源,同时有3个新截获的待跟踪辐射源)。
图2 时-频二维空间扫描方案安插原理示意图Fig.2 Schematic diagram of sweeping scheme insertion principle of time-frequency two-dimensional spatial
图2中,新辐射源1和2候选扫描方案对应的周期窗与既有辐射源跟踪的周期窗没有冲突,因此可成功安插到时-频空间中。但是对于第3个新辐射源跟踪任务,其稳定跟踪所需的周期窗与既有辐射源跟踪任务周期窗在时间上存在重叠,这意味着两个任务的资源需求之间发生冲突,如果不丢弃既有任务,则该新任务就无法按要求执行。这表明根据现有资源条件,ESM无法稳定跟踪第3个新截获的辐射源。显然,对于任意类型辐射源,稳定跟踪的目标数量取决于能够在时-频二维空间中排布多少该类辐射源稳定跟踪所占用的周期窗。据此,在窗函数的联合优化调整完毕后,以系统可按照预设数据率进行稳定跟踪的辐射源所对应的回访扫描4元组为元素所构成的集合,即为优化设计后的ESM时-频扫描方案:
(6)
(7)

(8)

(9)
该模型可按图3所示方式进行迭代更新,支撑不同阶段时-频扫描方案优化。
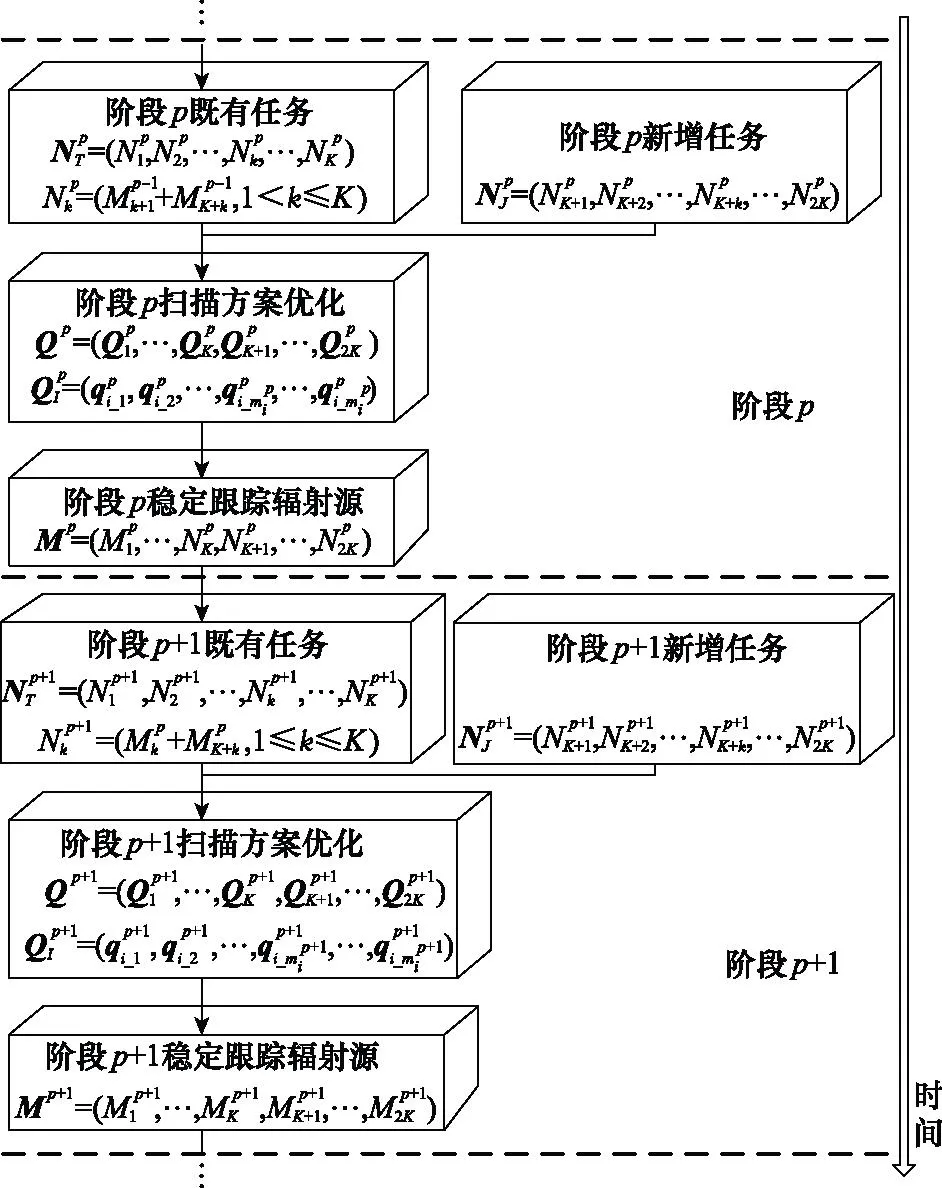
图3 优化模型迭代更新示意图Fig.3 Schematic diagram of optimization model iteration and updating
在图3所示的迭代更新流程中,各阶段内的时-频扫描方案优化都被建立为如式(9)所表示的多目标优化问题。从问题目标函数与限制条件可知,该模型综合考虑了该阶段内所有辐射源类型、数量与性能要求的影响,因此辐射源类型多样性带来的困难得到了解决。而根据模型从阶段p到p+1的迭代更新过程,可见模型中任意阶段的既有辐射源是上一阶段扫描方案优化后,由ESM可稳定跟踪的既有辐射源及新增辐射源合并得到。因此,在任意批次的新截获辐射源导致跟踪任务信息变化后,式(9)多目标优化问题所描述的模型可按图3所示的迭代方式随之自适应调整更新,逐阶段更新的方式解决了辐射源静默、交替开关机等因素给建模带来的困难。显然,新任务的逐渐增加会导致时间资源的逐渐消耗,系统资源条件也会由非饱和状态(时间资源未被耗尽,存在可用余量)转入饱和状态(时间资源耗尽,没有可用余量)。在非饱和与饱和两种情况下,模型的优化准则及方法都不同。延续前序工作,本文针对非饱和情况进行研究[20],此时为维持既有辐射源跟踪任务的连贯性,不对既有跟踪任务的时-频扫描进行调整,仅利用空闲的未用时间设计新辐射源跟踪的扫描方案。
2 性能评估方法
新辐射源跟踪任务在辐射源种类以及数量方面都存在随机特征,难以预先确定,ESM需适应尽可能多的新辐射源种类-数量组合情况。本文采用一种基于可行域的方法评估ESM对新任务的自适应性能:在任意阶段内,利用系统当前的任务与资源信息计算可行域,在新任务出现后,利用当前可行域与帕累托优化原理评估系统对新任务的适应能力;而在新辐射源进入稳定跟踪状态后,更新条件并重新计算下阶段的可行域。
首先结合本文研究背景,简要给出2个与帕累托优化相关数学定义[25-33]。

(10)

(11)
定义 2有如下关系成立时:

(12)

在时间资源总量受限的情况下,若部分类型辐射源稳定跟踪目标越多,消耗时间也越多,会导致其他类型辐射源可用时间减少、稳定跟踪目标数量下降。因此,所有类型目标的稳定跟踪数量难以同时达到最大,只能得到若干在不同指标上互有优劣的帕累托最优解。不同帕累托最优解分别代表一种耗尽资源所能达到的极限性能,此时不可能在继续改善任意指标的同时不造成其他指标的恶化。传统多目标优化问题求解的目的是得到所有帕累托最优解。但在本文中,仅有帕累托最优解难以完全满足实际需求。这是因为在新任务资源需求较低、系统资源余量未被耗尽的情况下,反而需要合理节省资源以应对后续新任务,此时被帕累托最优解支配的劣解反而与实际需求更为匹配。因此,可行域包含两个部分:第一部分为式(9)所描述的多目标优化问题的帕累托最优解集;第二部分则为各最优解所支配的劣解集合。可行域中任意元素即为ESM当前能够适应的一种新辐射源跟踪任务的种类-数量组合情况。下面给出可行域的计算步骤。
步骤 1读取当前系统参数,包括既有稳定跟踪目标种类、数量及对应时-频扫描方案。
步骤 2划定搜索范围,读取搜索范围内所有可能的新增任务种类-数量组合情况。
步骤 3搜索时-频扫描方案优化问题对应的帕累托最优解集,假设解集中包含H个最优解,令h=1。
步骤 4对于第h个最优解,搜索所有性能劣于该最优解的方案,同时存储所有次优解对应的扫描方案。
步骤 5令h=h+1,如果h 步骤 6将步骤3和步骤4所得到的可行任务进行合并,得到当前阶段可行域。 当可行域计算完毕后,如果新任务在多指标空间中的位置位于可行域中,则系统可稳定跟踪所有新截获的辐射源目标。可行域中成员数量较多,逐一比对越为耗时,为提高系统实时性能,可利用帕累托最优解集进行判断:如果新任务对应的新辐射源数量指标组被帕累托解集中任意成员所支配(或等于任意帕累托最优解),则该任务位于可行域内,此时系统读取并执行该任务对应的扫描方案(由步骤4计算得到并存储),实现对所有新辐射源的稳定跟踪;否则,则说明新任务资源需求超过资源余量,系统进入饱和状态,需要利用其他方式进行扫描方案的调整。在完成时-频方案的调整后,根据图4流程更新模型,重新按照上述步骤计算可行域,以应对下一次的新任务。 图4 ESM跟踪多辐射源场景示意图Fig.4 Schematic diagram of ESM tracking multiple-emitter scenarios 仿真所构想的任务场景为:利用ESM对海、空立体空间内搭载不同雷达设备的运输机、舰船以及战斗机进行持续跟踪监视,如图4所示。 对于ESM设备,分别设置其工作频段和瞬时带宽为0.2~18 GHz和100 MHz(B=100 MHz)。雷达设备共有3类:中大型运输机搭载的机载预警雷达、舰船搭载的舰载多功能雷达以及小型飞机搭载的机载火控雷达(K=3)。对不同雷达稳定跟踪所需跟踪数据率和驻留时间,根据其搭载平台的速度和探测距离进行设置:平台速度越快,则稳定跟踪所需数据率越高;雷达探测距离越远,通常其脉冲重复间隔(pulse repetition interval,PRI)就越大(忽略脉冲参差等情况),相应也需要增加对其回访的驻留时间,以保证一定的信号截获概率。综上,下面给出3类辐射源参数设置情况: (1) 现有机载火控雷达通常工作于X波段,战斗机速度快、稳定跟踪所需数据率高,但探测距离短(假设探测距离为150 km,PRI为1 ms),故驻留时间最短。 (2) 预警机雷达工作于UHF波段,运输机速度介于战斗机和舰船之间,稳定跟踪所需数据率要求中等,但其探测距离因平台高度带来的视距优势,是3类雷达中最远的(假设探测距离为450 km,PRI为3 ms),故驻留时间最长。 (3) 舰载多功能雷达工作于S波段,搭载平台为舰船,速度慢、对数据率要求低,其探测距离中等(假设探测距离为300 km,PRI为2 ms),故驻留时间长度也为中等。 仿真总时长为40 s,设置仿真前10 s没有辐射源被截获,称为空载阶段,新辐射源分3批出现,时间分别为开机后第10 s、第19 s和第26 s(某辐射源出现时间指的是截止当前时间,ESM对所有接收到的信号经检测、分选等处理后,判别为待跟踪辐射源并添加至待执行任务序列中的时间),具体参数设置如表1所示。 表1 辐射源目标参数设置表Table 1 Emitter target parameter setting 假设100 MHz瞬时带宽能覆盖预警机UHF波段所有工作频点[34],后续新增该频段预警机辐射源不会占用更多资源,因此第2批次和第3批次不考虑新增UHF频段预警机辐射源。采用与之前研究相同的优化准则[22],利用传统搜索加跟踪(track and search, TAS)法和负载均衡法优化设计时-频扫描方案(即计算优化问题的目标函数)并进行性能分析,结果如图5和图6所示。 图5 传统TAS扫描方案性能分析仿真结果示意图Fig.5 Schematic diagram of simulation results for traditional TAS sweeping scheme performance analysis 图6 负载均衡扫描方案性能分析仿真结果示意图Fig.6 Schematic diagram of simulation results for load balancing sweeping scheme performance analysis 在图5和图6中,红点代表一种可行任务方案;浅蓝色曲面代表可行域边界,亦即多目标优化问题的帕累托前沿。可行域的形状、范围及其容纳的所有可行任务方案从整体上表征了系统资源条件对多目标跟踪任务的容纳能力,而根据各红点坐标,又可具体分析系统对不同类型辐射源目标的稳定跟踪数量(任意红点的3个坐标值分别代表包含的低、中、高数据率任务数)。从结果可见,从空载阶段到阶段1~阶段3,系统负荷逐渐增加(执行的任务数量逐渐增加),可用时间资源减少,可行域也随之逐渐缩减,这表明本文所提方法的性能评估结果能够随系统负荷、资源余量等条件的变化而动态调整。下面对各阶段仿真结果进行具体分析。 首先,空载阶段负载均衡时序和TAS时序可行域大小形状基本一致,两种时序的可行域仿真图中,代表待执行任务(表1中第1批次辐射源)的蓝色方框与1个代表可执行任务的红点重合。这意味着待执行任务方案位于系统当前的可行域内,该任务方案内的所有辐射源均可被ESM稳定跟踪。 其次,对于阶段1和阶段2(即开始第1批辐射源跟踪任务以及添加第2批辐射源任务后的时段),随着执行任务数量的增加,资源消耗增加,两种时序可行域都逐阶段缩减。对于TAS,代表待新增任务方案的蓝色方框位于可行域外(蓝色方框与所有红点均无重合),这是由于新增任务方案中包含高数据率要求的X波段辐射源跟踪,但在添加第1批辐射源跟踪任务回访时序后,系统频域扫描时序中已不存在周期为1 s、驻留时间为100 ms的空隙,对应阶段1和阶段2的TAS可行域,可见所有可行任务仅能支持中、低数据率跟踪。此时,系统扫描方案分析与可行域性能分析结果一致,即只能容纳新增任务中的低数据率跟踪任务(S波段辐射源跟踪任务),高数据率跟踪任务则被舍弃(X波段辐射源跟踪任务)。而从负载均衡扫描方案可见,所有批次的辐射源跟踪回访时序均能被添加到系统时-频扫描方案中。从负载均衡阶段1和阶段2的可行域仿真结果也可看到,代表待执行任务方案的蓝色方框都位于对应可行域中,扫描方案优化设计与可行域分析结果同样保持一致,即系统可完整容纳所有新增任务方案。两幅仿真图对比的结论与前述工作结论一致,即相比TAS法,负载均衡能更好适应数量时变的多辐射源跟踪任务场景[12],同时可行域分析结果与实际扫描方案结果在各阶段都能保持一致,所提方法的动态评估有效性得到了验证。 最后,对比图5和图6阶段(即图5、图6的子图c、d、e)可见,TAS可行域大于负载均衡可行域,这是由新增的高数据率任务被丢弃、未能完全满足任务需求、资源利用率较低造成的,对比TAS时序和负载均衡时序,后者执行的任务更多,空闲时间更少,资源利用效率更高。 本文针对时变多辐射源跟踪任务下的ESM时-频扫描方案优化设计问题,提出了一种资源管理算法性能评估方法,可根据预设参数与系统当前任务执行情况,分析系统对随机出现的新任务的适应能力。首先,针对辐射源在类型和截获时间两方面的不确定性,将时-频扫描方案优化设计建模为一种迭代式多目标优化问题。然后,基于多目标优化领域中广泛应用的帕累托多优化理论,本文利用帕累托前沿以及其所支配的所有可行解设计了一种基于可行域的ESM时-频扫描方案性能评估方法。最后,仿真结果表明,在数量时变的多辐射源跟踪任务场景下,本文所提的可行域评估结果与实际时-频扫描方案性能一致,能通过可视化界面展示当前资源条件下传感器系统对新任务的容纳、适应能力,支撑操作员对系统负荷的评估与后续任务分配决策的制定。在后续研究计划中,拟进一步深入研究资源管理技术性能的量化评估方法,同时在多节点协同侦察、分布式多功能协同等任务场景中进一步拓展研究传感器时间资源管理技术。
3 仿真及分析
4 结束语
