基于DoDAF的低慢小飞行器综合处置体系架构设计
2024-01-16卫继承杨文雅马岚岭
卫继承, 张 娟,*, 杨文雅, 马岚岭, 张 航
(1. 西北工业大学力学与土木建筑学院, 陕西 西安 710129; 2. 上海烜翊科技有限公司, 上海 200233)
0 引 言
随着航空工业的快速发展,低慢小飞行器得到广泛应用,但由于技术手段的制约,低慢小飞行器的处置具有明显的滞后性,低慢小飞行器的综合处置作战已成为新型体系作战研究的热点和难点[1-2]。
典型低慢小飞行器的处置系统包括传感系统、中和系统[3]、指控系统等[4-5],因此传统低慢小飞行器处置体系的建设思路多基于探测跟踪[6-7]、预警技术[8-9]、干扰诱骗[10-11]、毁伤技术[12-13]等方面的特长进行研究[14]:部分研究者通过传统技术手段对低慢小飞行器的综合处置体系展开系统级的研究[15-16];部分研究者在传统手段的基础上对低慢小综合处置体系中某些关键技术流程进行了设计[17]。
随着作战模式、作战手段和作战空间的改变,低慢小飞行器的处置过程趋于多个系统及其子系统之间互相协调、密切交互的多维度多步骤的综合过程[18],低集成化的技术手段难以有效解决复杂作战环境下低慢小目标的综合处置问题。研究者开始探索其基于模型的体系架构设计方法:在体系架构设计工具层面对低慢小综合处置体系的架构提供了设计支持[19];采用数值仿真对低慢小综合处置体系的指控系统进行了建模和仿真[20];从体系建设的层面对低慢小目标综合处置体系进行了研究,提出一种软硬兼施的低慢小目标防控体系[21];对包含低慢小飞行器在内的无人机的反制技术体系架构基本框架进行了初探[22]。
然而,面向未来的新型低慢小飞行器的综合处置体系有着更为突出的难点:其威胁环境更复杂、多学科关键技术交互更密切[23]。为解决上述难点、降低设计的复杂性,有必要引入美国国防部体系架构框架(Department of Defense Architecture Framework,DoDAF)来实现对低慢小飞行器的综合处置体系的架构设计。
DoDAF作为一种体系架构方法为构建复杂作战体系提供了行之有效的手段。美军国防部于2004年发布了DoDAF1.0,在2007年更新为DoDAF1.5[24-25],在2009年正式更新为DODAF2.0[26]。由DODAF2.0框架建立的模型,可以对复杂体系各层次及粒度进行体系建模与仿真。
因此,本文基于DODAF2.0对其视角视图进行“补充、裁剪、融合”,形成一套面向复杂体系分析与设计问题可复用迭代的架构方法及一套体系架构快速设计方法,并以一种新型多元载荷协同作战的低慢小综合处置体系进行建模与仿真,为低慢小飞行器的综合处置体系提供了系统全面的描述和可靠的概念模型支撑。
1 体系架构设计方法
1.1 体系架构设计方法工作流程
DoDAF作为体系架构框架被应用于诸多领域,但在美国国防部发布的DoDAF2.0文档[26]中并未涉及完备的实践流程,因此还未有成熟的体系架构设计方法可以借鉴。在基于具体业务的体系架构设计工作中,需要结合体系架构正向设计的需求对设计方法和设计过程进行深入研究。
因此,本节对体系架构设计的视角及各视角下的视图进行了详细设计及优化,定义了各视角的建模顺序及各视角下的视图建模方法,新增需求视角,最终建立起基于DoDAF2.0的可覆盖完整业务的体系架构设计方法。
1.1.1 全局视角建模流程
全局视角的输入来源是国家顶层军事战略描述与整个体系架构有关的顶层内容,包括范围、背景、威胁、规则、约束条件、假设等。在体系架构开发的整个生命周期中,全局视角保证了组织变化前后体系架构描述的连续性。
全局视角建模流程首先构建AV-1全局背景描述视图,然后构建AV-2全局数据字典视图。其中,AV-2视图在体系架构建模过程中被不断更新,是整个建模工作的终点。
1.1.2 能力视角建模流程
能力视角用于解决决策层所关心的问题。美国国防部为弥补传统的“基于威胁规划”的体系需求开发方法在一体化联合作战[27]中的不足,将“基于威胁规划”的体系需求开发方法发展为“基于能力规划”方法,并逐渐形成了“能力需求牵引武器装备体系发展建设”的共识[28]。
能力视角下视图构建流程如图1所示。能力视角下视图的构建是能力需求对作战使命任务的映射:一方面,能力视角作为整个体系架构设计的目的和约束,为后续评估体系的构建提供能力牵引;另一方面能力视角可为决策层审视不同体系架构方案是否存在能力重叠提供依据,避免能力的重复建设、获取能力缺陷和差距。
1.1.3 作战视角建模流程
作战视角从作战业务的角度对战略层次的能力需求进行回应,阐述实施作战所需的任务与活动、作战流程、作战要素以及资源流等,重用了能力视角中的各种能力,将其带入具体的作战想定中进行分析,从而对能力的边界进行约束达成共识。因此,通过作战视角下视图的定义能够提升需求的质量及完备性,作战视角下视图构建流程如图2所示。
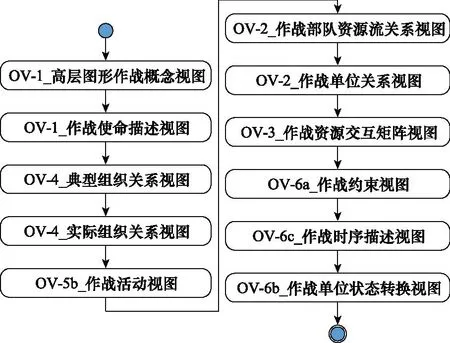
图2 作战视角下视图构建流程Fig.2 View construction process of operational viewpoint
1.1.4 系统视角建模流程
系统视角用来描述支撑作战能力的系统功能以及系统之间交互关系等,根据作战场景中作战单位和作战流程,确定参与武器系统的类型、武器系统的配比方案;然后基于攻防对抗流程,分析武器系统所需执行的活动;将各武器系统执行的活动进行综合,获得武器系统的顶层功能;逐条分析系统在作战时的各种约束,并进行基于约束的系统活动时序的分析;确定各武器系统所执行的所有状态间的迁移关系;最后基于以上系统业务的分析牵引出系统的性能指标度量。系统视角下视图构建流程如图3所示。

图3 系统视角下视图构建流程Fig.3 View construction process of system viewpoint
1.1.5 标准视角建模
标准视角用来管理系统各组成部分或要素的编排、交互和相互依赖的规则的最小集[29],目的是确保系统能满足特定的作战能力、确定现在或将来需要用到的技术标准。标准视角的构建流程为先构建StdV-1标准提要视图,再构建StdV-2标准预测视图。
1.1.6 需求视角建模流程
基于DoDAF2.0的体系架构设计是一个以需求为中心的迭代过程,其侧重在于从需求到实现的自上而下的细化的过程,为了更直观地将上层功能精确映射到需求中,在DODAF 2.0框架上补充构建需求视角,需求视图构建流程如图4所示。

图4 需求视角下视图构建流程Fig.4 View construction process of requirement viewpoint
首先,基于体系架构模型中的使命任务、作战能力、作战活动等模型数据生成RV-1体系需求视图、RV-2使命任务需求视图。其中,体系需求视图包括:作战需求视图、装备能力需求视图、装备外部接口需求视图以及装备状态集视图。
其次,构建需求追踪矩阵视图:通过RV-4a矩阵视图建立使命任务与作战能力需求之间映射的关系,通过RV-4b矩阵视图建立作战能力与分系统需求之间映射关系。
通过使命任务到作战能力需求、作战能力到分系统需求的矩阵描述可直观地对需求传递的完整性、传递过程是否存在重复满足、需求实现是否存在缺陷等方面进行判断,最终实现需求上下层之间的满足度分析。
最后,进行需求追踪分析与管理:分析使命任务是否被完全覆盖,装备功能能否实现使命任务,对分系统需求和装备能力需求之间的来源进行分析。
1.1.7 体系架构设计方法工作流程
通过前节中对DoDAF各个典型视角的标准建模流程的分析与设计,提出如图5所示的体系架构设计完整建模流程。

图5 体系架构设计完整建模流程Fig.5 Total modeling process of architecture design
1.2 体系架构快速设计方法
在体系的架构设计过程中,本文基于业务因素在DoDAF各主要视角完整工作流程的基础上提出体系架构快速设计方法如图6所示。
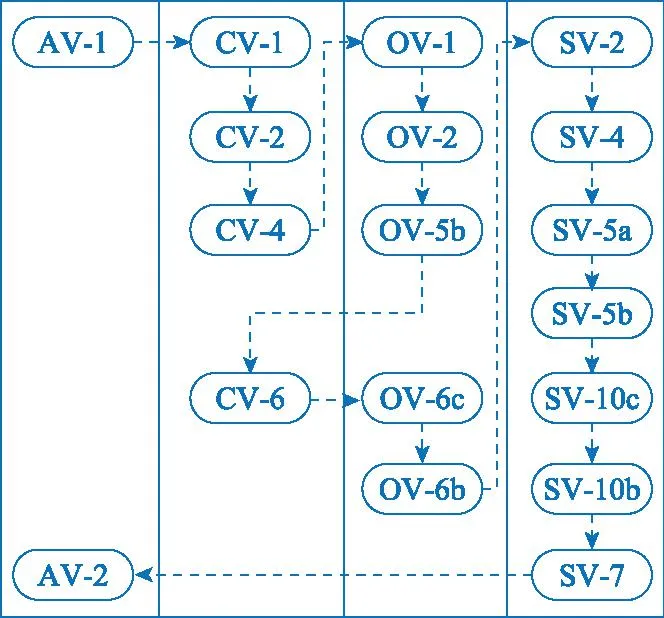
图6 体系架构快速设计方法Fig.6 Rapid design method for architecture
步骤 1对作战概念进行构想,完成AV全局视图建模。
步骤 2对杀伤链[30]和作战能力进行分析,完成CV能力视图建模。
步骤 3对作战过程进行分析,基完成OV作战视图建模。
步骤 4设计武器装备配置方案,对武器系统的行为逻辑进行分析,完成SV系统视图建模。
步骤 5将AV、OV视图中的使命任务与CV视图中的作战能力、SV中的武器装备建立映射关系,进行需求分析。
2 低慢小飞行器综合处置体系架构设计实例
根据上述体系架构设计方法,本节搭建起一套基于侦察、指控、通信、拦截四方面载荷高效集成、协同防控的新型低慢小飞行器综合处置体系。该体系在探测与处置手段相结合的基础上,增加了指控、通信等载荷,以各方面载荷的协同及综合集成作为设计目标,将指控节点服务化、体系能力条目化、处置手段多元化、目标拦截精准化作为架构设计思路,形成了基于DoDAF2.0以指控为核心的综合处置体系模型。由于篇幅限制,本文只展示部分关键体系结构模型。
2.1 全局视角建模
AV-1全局背景描述视图包含了低慢小综合处置体系架构的概述和顶层信息,使决策者能够在体系架构模型之间快速参考和比较,主要记录项目作者和版本信息、作战区域、作战时间、作战背景等。
2.2 能力视角建模
CV-1能力构想视图用来描述低慢小综合处置体系架构生命周期、愿景、目标等高层视野。本文提出的新型低慢小飞行器综合处置体系架构的生命周期可以分为发现目标和实施打击两个阶段,主要依赖的一级作战能力有:探测、指控、通信、打击、机动等能力。
CV-2能力分解视图描述作战中的能力的层次化结构即描述低慢小综合处置过程中所需的二级或更细粒度的作战能力以及各个层次能力之间的层级关系,如图7所示。

图7 CV-2能力分解视图Fig.7 CV-2 capability breakdown view
CV-2和CV-4都是用来处理能力之间关系的视图,CV-2进行能力的分解,而CV-4用于描述能力之间的依赖关系,低慢小综合处置体系能力依赖如图8所示。

图8 CV-4能力依赖关系视图Fig.8 CV-4 capability dependency view
2.3 作战视角建模
OV-1高层作战概念视图是对作战高层作战概念进行图形化的表示。低慢小综合处置中的作战单位主要有:预警探测单位、地面指挥单位、处置单位。
OV-2作战资源流描述视图,描述低慢小飞行器综合处置作战节点之间的连接和信息交互及作战单位之间的关联关系,作战资源流描述视图如图9所示。

图9 OV-2作战单位资源流描述视图Fig.9 OV-2 operational unit resource flow description view
OV-5b作战活动流视图,描述低慢小综合处置中作战活动与作战活动之间的关系以及作战活动与作战单位之间的关系,作战活动流视图如图10所示。

图10 OV-5b作战活动流视图Fig.10 OV-5b operational activities flow view
OV-6c作战时序视图,描述低慢小综合处置中指定作战规则下作战单位的作战时序以及作战单位之间的事件交互,作战时序视图如图11所示。

图11 OV-6c作战活动时序图Fig.11 OV-6c operational activity sequences view
OV-6b作战单位状态转换视图,描述作战单位在作战中所执行的状态及状态间的转换关系以及外部事件驱动,作战单位状态转换视图如图12所示。

图12 OV-6b作战单位状态转换视图Fig.12 OV-6b operational unit state transitions view
2.4 系统视角建模
SV-2系统关系视图,定义低慢小飞行器综合处置作战中武器系统之间的关系、接口及资源交互,如图13所示。

图13 SV-2系统关系视图Fig.13 SV-2 system relationship view
SV-4系统功能分解视图,定义低慢小飞行器综合处置作战中武器系统的顶层功能需求、武器系统标准功能的组成和层级关系以及武器系统之间的数据流和功能流,分别如图14和图15所示。

图14 SV-4系统分解视图Fig.14 SV-4 systems breakdown view

图15 SV-4系统功能流描述视图Fig.15 SV-4 systems function description flow view
SV-5a系统功能与作战活动映射视图,描述低慢小综合处置体系中武器系统顶层功能与作战活动之间的关系。SV-5b系统与作战活动映射视图,描述低慢小飞行器综合处置作战中武器系统与作战活动之间的关系。SV-10c系统时序描述视图,描述指定作战规则下的各武器系统的作战时序以及低慢小飞行器综合处置作战中各武器系统之间的事件交互,其建模方法与OV-6c作战时序视图相同。SV-10b系统状态转换视图,描述低慢小飞行器综合处置作战中各武器系统执行的状态及状态间的转换关系以及各武器系统收到的事件驱动,其建模方法与OV-6b作战单位状态转换视图相同。
SV-7系统度量视图,用于描述各武器系统的顶层功能及对应的性能指标及其度量,牵引综合处置体系的战技指标,如图16所示。

图16 SV-7系统度量视图Fig.16 SV-7 system measures view
3 可执行模型的仿真验证
可执行模型的仿真验证原理是通过体系架构模型仿真运行能力,生成用于复杂模型验证的可执行框架,实现作战体系架构的逻辑推演,即对作战概念、作战流程完整性和逻辑正确性验证,为模型的业务正确性和分支的完整性提供判断依据,如图17所示。

图17 体系架构仿真运行流程Fig.17 Operation process of architecture simulation
可执行模型的仿真验证主要包括作战视图模型逻辑仿真和系统视图模型逻辑仿真。在仿真过程中,提供可视化手段对架构模型进行推演,即对状态机进行着色处理,可执行模型的状态转换视图体现当前所处的状态。按照状态机的执行过程实时生成动态时序图,可执行模型的动态时序图体现了各执行者执行的活动、顺序和执行者间的资源交换。
作战视图模型逻辑仿真推演可以完成作战逻辑的验证,包括敌我双方攻防对抗流程的仿真验证、作战单位作战能力的仿真验证,如图18所示。系统视图下的仿真完成系统级模型逻辑的验证,包括对敌我双方武器系统的运行流程的仿真验证和对武器系统的顶层功能的仿真验证。

图18 作战视图的逻辑仿真示例Fig.18 Example of logical simulation in operational view
以系统视角下某几处关键外部触发为例,对可执行模型的逻辑自洽仿真验证进行演示。
在作战初始阶段,当低慢小综合处置体系收到作战开始指令后,指挥所向预警系统与无人侦察机下达侦察指令,收到指令后无人侦察机进行侦察探测,预警系统值班待命。当外部触发执行“作战开始”指令,可执行模型的动态仿真执行如图19所示活动,在该阶段,仿真结果与预期设计一致,说明模型功能描述正确。同理,当外部触发执行“打击效果评估”及“决定打击目标”指令时仿真验证结果如图20和图21所示。
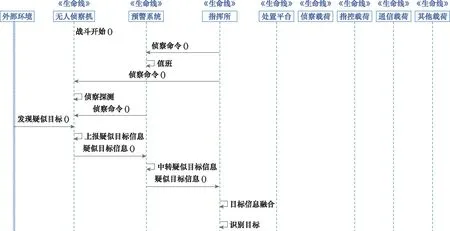
图19 “作战开始”模型响应Fig.19 Response of “operation start” model

图20 “打击效果评估”模型响应Fig.20 Response of “strike effect evaluation” model

图21 “决定打击目标”模型响应Fig.21 Response of “determine strike target” model
模型仿真验证的结果证明:体系架构模型功能完整、合理、可靠,可执行模型的活动、时序、状态转换符合作战逻辑,资源流描述与作战想定一致;同时在仿真过程中能够得到实时战场态势,为后续智能决策的实现提供了一定的参考。
4 结 论
航空工业的快速发展带来了低慢小飞行器使用量的爆发式增加,对作战模式、作战手段和作战空间产生了深刻的影响,低慢小飞行器的综合处置逐渐成为未来战场的重要作战形式。本文在精确分析体系架构建模理论的基础上,围绕其八类视角52类视图进行了“裁剪+补充+融合”,补充需求视角,形成一套面向各类复杂体系分析与设计问题完备的架构方法及一套体系架构快速设计方法,并提出了一种新型多元载荷协同作战的低慢小综合处置体系。针对某一典型作战场景进行运用:首先根据典型场景提供的需求作为输入,从全局、作战、系统等多个视角对作战流程、作战逻辑以及接口关系等进行分析和描述,以模型为基础进行静态分析;然后对生成的可执行的DoDAF模型进行仿真验证,结果证明体系架构模型功能完整、逻辑正确。通过模型和仿真为低慢小的综合处置作战提供了系统全面的描述和可靠的概念模型支撑,并为后续作战研究提供进一步的牵引。
