微波光子W波段宽带雷达成像技术研究
2024-01-16江利中颜露新谭姗姗茹海忠杨明远
江利中, 颜露新, 谭姗姗, 茹海忠, 杨明远
(1. 华中科技大学人工智能与自动化学院, 湖北 武汉 430074;2. 上海无线电设备研究所, 上海 201109; 3. 上海卫星工程研究所, 上海 200240)
0 引 言
雷达成像技术是一种通过发射电磁波对探测目标进行照射,并依据目标回波实现对目标成像的一种技术。由于微波毫米波对雨、雾、烟等天气环境具有较强的穿透力,且雷达具有主动探测工作模式,因此雷达成像技术在航天、航空、武器等多个领域受到广泛应用[1]。由于采用较短的收发波长,W波段成像雷达具有较大的天线收发增益、较窄的波束宽度和更显著的多普勒效应,使其更容易实现高分辨率微波成像。因此,研制W波段成像雷达广泛受到各国研究机构的重视。与传统成像雷达相比,W波段逆合成孔径雷达(inverse synthetic aperture radar, ISAR)在对目标进行识别时具有更高的准确性和较远的成像距离。毫米波系统由于体积小、重量轻、俯视角好等优势,有利于机载、弹载、星载平台搭载。近年来,W波段相关器件的发展为毫米波成像雷达提供了可能[2]。美国HUSIR系统[3]和WARLOC系统[4]以及德国COBRA系统[5]都是利用毫米波实现雷达成像的成功案例。然而,由于毫米波系统存在器件生产工艺要求高、波导损耗大、瞬时大带宽脉冲波形难以实现等问题,W波段ISAR成像相对传统雷达成像更加困难,目前国内也只有少量的相关报道[6]。
微波光子技术作为突破传统“电子瓶颈”效应的有效手段,近年来在国内外取得广泛关注[7-8]。相对传统电子技术,微波光子技术在频率、带宽、体积、抗电磁干扰等诸多方面都具有一定优势。自相关概念被提出以来,基于微波光子技术的低相位噪声信号源、宽带信号的产生与调控、信号变频、倍频等多种与雷达系统相关的功能已被报道,证实了微波光子技术在雷达技术中的研究价值。目前,国内外已发表一定数量针对微波光子雷达系统的研究成果[9-13],充分证明了将微波光子技术和雷达成像技术相结合的可行性。
本文提出了一种基于微波光子技术实现的W波段调频信号体制ISAR成像系统。首先,从理论上分析了W波段雷达信号产生、回波信号处理以及ISAR成像。以此为基础,本文通过仿真模拟了W波段ISAR对目标探测的全过程。在发射端,使用微波光子八倍频技术实现了中心频率为96 GHz、瞬时带宽为8 GHz的W波段线性调频信号生成。在接收端,目标回波处理是基于微波光子去斜技术。ISAR成像仿真结果表明,不同姿态下的目标轮廓清晰可辨。
1 W波段雷达信号产生
1.1 系统组成和原理
图1为W波段雷达系统原理结构。激光器产生的单频光信号通过一个光功分器分成两路,其中一路光信号用于回波信号接收,另一路光信号注入到相位调制器1中作为光载波。中心频率为12 GHz、带宽为1 GHz的低频线性调频信号作为调制信号加载于相位调制器的射频端口。调节线性调频信号的功率,相位调制器的输出端会产生多阶调制光边带。使用光滤波器对调制器输出的光信号进行滤波,使其输出±4阶调制光边带。滤波后的光信号注入到工作带宽足够大的高速光电探测器中。此时,系统产生的雷达信号的中心频率和带宽均为低频调频信号的八倍,即中心频率为96 GHz、带宽为8 GHz的W波段线性调频信号。图1中虚线框部分为系统的W波段信号产生部分。系统产生的W波段线性调频信号经功分器分成两路,一路作为参考信号,另一路经功率放大器放大,用于目标探测与成像。

图1 W波段雷达系统原理结构Fig.1 Theory framework of W-band radar system
1.2 雷达信号产生过程理论分析
首先,从理论上分析了W波段雷达信号产生过程。假设激光器产生的光信号和系统输入的低频调频信号可以分别表示为
Ein(t)=E0exp(j2πfct)
(1)
(2)
式中:E0和V0分别表示光信号和低频调频信号的幅度;fc是光信号的频率;f0和k0分别是低频调频信号的中心频率和调频斜率。此时,相位调制器输出的光信号可以表示为
EPM(t)=
(3)

(4)
式中:m0=πV0/Vπ是相位调制器的调制指数,Vπ是调制器的半波电压;Jn(·)为n阶第一类贝塞尔函数。相位调制器输出的光信号经光滤波器选出±4阶调制光边带,其余光边带在滤波器带外,可以被忽略,此时滤波后的光信号可以表达为式(4)。
滤波后的光信号注入光电探测器,此时光电探测器输出的线性调频电信号可以表达为

(5)
式中:R1表示光电探测器的响应度;DC1表示直流成分。由式(5)可知,系统产生信号的中心频率和调频带宽均为低频输入电信号的八倍,该信号可作为雷达发射信号实现目标高分辨率探测。
1.3 雷达信号产生过程仿真分析
通过仿真对W波段信号产生过程进行模拟。使用中心频率为12 GHz、调频带宽为1 GHz的低频线性调频信号对中心波长为1 550 nm的光载波进行相位调制,调制后信号光谱如图2(a)所示。从图2(a)可知,多个调制后的光边带清晰可见。通过光滤波器选出±4阶调制光边带,滤波后信号光谱如图2(b)所示。其中,光滤波器采用的是矩形双通带滤波器,两通带带宽均为4 GHz,阻带抑制比为100 dB,滤波器的响应曲线如图2(b)中红色虚线所示。通过滤波选出的两个光边带的带宽都是4 GHz,且两个光边带的中心频率差为96 GHz。经光电探测后,系统产生W波段调频信号的频谱如图2(c)所示。从图2(c)可知,W波段信号的中心频率和调频带宽分别为96 GHz和8 GHz,实现了中心频率和带宽均为8倍提升。

图2 W波段雷达系统的光谱图和频谱图Fig.2 Optical spectrum and electrical spectrum of W-band radar system
此外,通过改变光滤波器的参数,该系统能够产生不同频率、不同带宽的雷达信号。图3是在不同的光滤波器参数下,光滤波器输出的光谱以及相应光谱经光电探测后输出的电谱。图3(a)、图3(b)和图3(c)分别用光滤波器选出-2阶和+3阶光边带、-3阶和+3阶光边带、-3阶和+4阶光边带,图中的红色虚线为所使用滤波器的响应曲线。选出的光边带经光电探测器后,输出不同频率、不同带宽的雷达信号,它们的频谱如图3(d)~图3(f)。因此,该系统生成雷达信号的频率和带宽具有良好的可调谐性。



图3 光滤波器不同参数下输出的光谱以及对应的频谱Fig.3 Optical spectrum and the corresponding electrical spectrum under different parameters of the optical filter
2 W波段回波信号去斜接收
2.1 系统组成和原理
W波段雷达去斜接收原理图如图4所示。为了实现对目标探测,将系统产生的W波段信号经功分器分成两路,一路通过功率放大后经天线发射到空间中,另一路则输入到第2个相位调制器的射频端口,将参考信号调制到光域。目标反射后的回波信号由接收天线收集,然后注入到第3个相位调制器,其目的是调制第2个相位调制器输出的光信号。此时,第3个相位调制器可以产生同时调制了参考信号和回波信号的光信号。使用光滤波器选出靠近光载波频率为96 GHz的宽带光信号。由于回波信号与参考信号之间的频率差与延时有关,将滤波后的光信号输入到光电探测器中可以得到具有固定频率的单频电信号。图4中虚线框部分为系统的接收系统部分。由于去斜信号频率与回波延时成正比,因此可以得到目标距离信息。
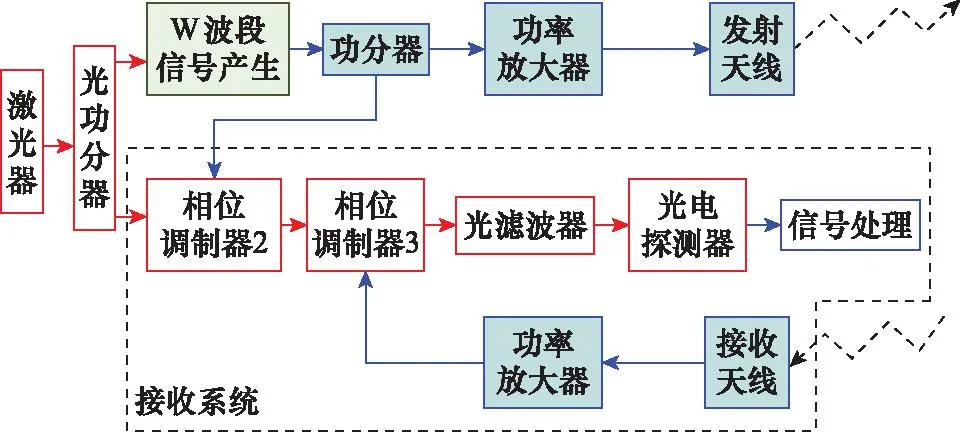
图4 W波段雷达信号去斜接收原理图Fig.4 De-chirp receiving schematic diagram of W-band radar signal
2.2 回波信号接收过程理论分析
为了便于计算,将W波段调频雷达参考信号和回波信号进行简化,即
(6)
(7)
式中:V1和V2分别表示参考信号和回波信号的幅度;f1=8f0;k1=8k0;τ表示信号在空间传播中的时间延迟,则经过两次相位调制后产生的光信号可以表达为

(8)
式中:m1和m2分别是两个相位调制器的调制指数。
此时,通过光滤波器选出靠近光载波频率为96 GHz的两个光边带,该光信号可以表达为
(9)
式中:A1和A2分别是两个光边带的幅度。经光电探测后,输出的低频去斜信号可以表达为

(10)
式中:R2表示光电探测器的响应度;DC2表示直流成分;A3表示去斜后信号的幅度。从式(10)可知,该信号的频率取决于输入信号的调频斜率以及回波信号的延时。因此,可以从去斜后的信号中提取目标的距离信息。
2.3 回波信号接收过程仿真分析
在雷达接收端,目标回波信号的处理是基于微波光子去斜技术。假设探测物体长度为20 m、宽度为10 m,且探测物体与天线之间的距离为5 km。该探测物体存在多个散射点,总共产生10个具有不同延时的回波信号,微波光子去斜后电信号的频谱如图5(a)所示。图5(b)是图5(a)局部放大的结果。从图5(b)可知,从0.889 5 GHz到0.893 1 GHz之间存在10个不同频率的单频信号。依据仿真采用的信号带宽为8 GHz、脉冲宽度为0.3 ms,能够计算出相距5 km处探测目标对应的去斜频率为f=kτ≈ 0.889 5 GHz,该理论值与仿真结果一致。对图5(b)中的10个单频信号进行处理,可以得到目标的距离像。

图5 不同延时回波信号去斜处理后信号的频谱Fig.5 Electrical spectrum of the signal after de-chirp processing of the echo signals with different delays
3 W波段ISAR成像
3.1 雷达成像原理
假设探测目标存在多个散射点且按角速度ω转动,用L表示目标到天线的距离,x和y分别表示散射点在不同方位上的位置。如果使用一个采样间隔大于调频信号时宽的慢时间tm对目标采样,则当目标与天线之间的距离远大于目标尺寸时,目标与天线之间的距离可以近似表达为
R≈L+xcos(ωtm)+ysin(ωtm)
(11)
如果每次采样目标的角度变化趋近于零,则式(11)可以近似为
R≈L+x+yωtm≈L+x
(12)
假设天线发射的调频信号为ET,则微波光子去斜处理后得到的信号可以表达为
(13)
式中:V3表示幅度,该信号的第一个相位项包含了目标的距离信息,第2个相位项与多普勒频率有关,可以用来得到目标的方位信息。如果按照采样时间t对第1个相位进行分析则可以得到频率f=2Rk1/c,进而得到目标相对天线的距离R≈L+x。将R≈L+x+yωtm代入式(13),按照慢时间tm对第2个相位项进行分析可以得到多普勒频率fd=2yωf1/c,进而根据发射信号频率和目标角速度得到散射点的方位信息,结合散射点的距离信息和方位信息实现目标成像。
3.2 雷达成像中的运动补偿
如果目标相对天线按一定的速度v运动,则散射点与天线之间的距离可以表示为R+v(t+tm),此时需要通过平动补偿来保证成像结果不受目标运动的影响。在目标运动的情况下,系统距离向的包络通常会发生偏移,导致无法获得清晰的目标成像。通常,需要采用距离校准对偏移的距离信息进行补偿,常用相关法[14]或最小熵法[15]等方法对偏移量进行估计,并根据估计的值对齐信号包络,从而保证得到的距离不受目标平动的影响。经距离校准后,目标平动引起的包络偏移已经得到补偿,而平动引起的相位误差会影响成像所需的多普勒频率,因此需要初相补偿过程对信号的相位进行补偿。由于每次采样中,同一目标的每个散射点具有相近的影响,可以通过特显点法[14]等方法对信号的相位进行补偿,进而通过方位压缩处理获得目标高分辨率成像结果。
若目标运动速度较大,散射点的运动会引起距离维位置随慢时间发生缓慢变化,若该变化超过最小分辨单元,则会引起距离单元徙动。此时,由于运动导致的频率会与多普勒频率耦合,最终影响方位信息。可以通过对慢时间的采样间隔进行适当的尺度变换将耦合的频率恢复为多普勒频率[16],消除距离徙动对成像的影响。
3.3 雷达成像仿真分析
假设探测目标为如图6所示的雅克-42飞机[17],目标由432个散射点组成,且整个目标按一定的速度和角速度进行运动。雷达发射信号形式为线性调频信号,中心频率为96 GHz、带宽为8 GHz。理论上,ISAR成像的距离分辨率是1.875 cm。目标散射点的回波信号使用去斜技术进行处理。如果直接对去斜后的信号进行距离向FFT处理,此时所得到的距离像会出现包络偏移现象。通过距离校准对包络的偏移量进行估计并补偿,可消除包络偏移对成像结果的影响。

图6 成像采用的雅克-42飞机目标模型Fig.6 Yak-42 aircraft target model used for imaging
经过距离校准之后,目标平动引起的包络偏移已得到补偿。由于信号的相位受到目标运动的影响,无法实现良好的聚焦效果,导致不能对目标进行高分辨率成像。如果对距离压缩后的信号进行初相补偿,用于消除平动对相位造成的影响。对初相补偿后的数据执行方位压缩得到散射点的方位信息,结合距离信息和方位信息,进而实现二维成像。从图7可知,不同姿态下的目标ISAR成像距离向和方位向分辨率均为2 cm,飞机成像结果轮廓清晰,头部、机翼和尾部均明显可分辨。

图7 雅克-42飞机目标模型的不同位置处的成像仿真结果Fig.7 Imaging simulation results at different positions of the Yak-42 aircraft target model
4 结 论
本文提出了一种基于微波光子技术实现的W波段ISAR成像系统,该系统主要由W波段宽带雷达信号生成、回波信号处理及ISAR成像三部分组成。本文通过原理分析、理论推导以及仿真对系统进行分析和验证。通过仿真模拟了W波段ISAR对目标探测的全过程,发射端实现了中心频率为96 GHz、带宽为8 GHz的雷达信号生成,接收端实现了回波信号去斜处理。ISAR成像仿真结果表明,不同姿态下的目标轮廓清晰可辨。
