基于扩展观测器的永磁同步电机快速积分终端滑模控制
2024-01-16陆园朱其新朱永红
陆园,朱其新,朱永红
(1.苏州科技大学电子与信息工程学院,江苏苏州 215009;2.苏州科技大学机械工程学院,江苏苏州 215009;3.苏州市共融机器人技术重点实验室,江苏苏州 215009;4.景德镇陶瓷大学机电工程学院,江西景德镇 333001)
0 前言
永磁同步电机由于结构简单、质量轻、体积小、运行可靠、散热良好、易于人工维护、传输效率高等优点,已广泛应用于高精度数控机床、机器人、航空航天等领域[1-3]。由于电机模型的非线性,参数失配和转矩脉动降低了伺服控制系统的跟踪精度和稳定性。同时,常规的控制方法(PI控制)易受到外部干扰和内部参数不确定性的影响,从而使控制系统偏离期望目标。
因此,在PMSM中已经有多种非线性控制方法,例如滑模控制(Sliding Mode Control,SMC)[3]、自抗扰控制[4]、自适应控制[5]、预测控制[6-7]和状态反馈控制[8-9]。在这些控制方案中,SMC策略备受关注。SMC是一种非线性鲁棒方法,与其他高级控制方法相比,它保留了相对简单的设计和实现过程[10]。基于SMC强大的鲁棒性、实现简单、对匹配参数的扰动不敏感等优点,可以通过频繁切换系统结构抑制系统参数变化和外部干扰来实现系统的高性能控制[11-12]。
为实现有限时间收敛,ZAK[13]和MAN、YU[14]提出了终端滑模控制(Terminal Silding Mode Contral,TSMC)和积分终端滑模控制(Integral Terminal Silding Mode Contral,ITSMC)。CHIU[15]引入了符号和分数积分终端模型,提出了不确定模型的积分终端滑模控制,并通过在递归结构中结合导数和积分终端滑模,提出了2种导数-积分终端滑模控制方法,实现了高阶MIMO系统的有限时间收敛,避免了控制器中的奇异问题。TSMC和ITSMC方法在机器人控制中[13,16]已经得到了广泛的应用。此外,在存在不匹配干扰的情况下,TSMC的瞬态性能较差。LI 等[17-19]提出的ITSMC,通过在滑模变量中添加积分项设计终端滑模面,并实现有限时间收敛,同时仍保留SMC的鲁棒特性。CHANG等[20]通过创新分数误差积分,在没有奇异问题的情况下,可以实现跟踪误差和积分误差的有限时间收敛。 LI等[17]的研究表明:可以保证系统状态到达滑模面,然后在有限的时间内收敛到原点,同时通过使用ITSMC消除奇异性问题。ULLAH等[21]提出了匹配不确定性下运行的四轴飞行器的完整飞行轨迹跟踪控制律。LABBADI、 CHERKAOUI[22]设计了用于姿态控制的鲁棒ITSMC控制器以及用于位置和高度的自适应Backstepping。为了提高收敛速度和精度,LABBADI、 CHERKAOUI[23]在随机外部干扰和参数不确定性的情况下,研究自适应分数阶非奇异快速终端滑模控制器的无人机。
为了进一步提高永磁同步电机调速系统的动态性能,本文作者提出一种快速积分终端滑模面(Fast Integral Terminal Sliding Mode Control,FITSMC),以提高传统积分终端滑模控制在速度误差远离平衡点时的跟踪误差收敛速度。然后,考虑到负载扰动的影响,设计一种基于双曲正切函数(Hyperbolic Tangent Function,HTF)的扩展状态观测器(Extended State Observer,ESO)观测扰动,并将它作为前馈补偿部分加入到 FITSMC。
1 PMSM数学模型
PMSM调速系统在d-q旋转坐标系中的定子电流方程表示为
(1)
其中:ud、uq和id、iq分别表示d和q轴的电压和电流;R表示定子电阻;L表示定子电感;ed、eq表示电机反电动势。
(2)
其中:Ld和Lq分别表示d轴和q轴电感;ωe、ωr分别表示电角速度和机械角速度;P是电机的极数。
PMSM的机械运动方程写为
(3)
其中:J表示转动惯量;TL表示负载转矩;B表示黏度系数;Te表示电磁转矩。对于表面贴装PMSM,电磁转矩Te可以表示为
Te=1.5Pψfiq
(4)
2 ESO的设计
设对象为如下有扰动作用的非定常系统:
(5)
其中:
f(x1,x2,t)=-(1+cost/2)x1-(1+
sin(t/3))x2;
(6)
w(t)=sign(sin(3t/2))
取状态观测器为
(7)
其中:
采用双曲正切函数(Hyperbolic Tangent Function,HTF)代替fal函数。由于双曲正切函数为奇函数,在(-∞,+∞)内为单调递增函数并且光滑连续,其值域具有饱和特性,其导数为1/cosh2x,恒不为0。
在x=0的邻域内,如图1所示,双曲正切函数可近似为线性函数,且斜率较小,在误差范围内可以兼顾滤波与观测效果。
对于式(5)的非定常系统,采用不同的函数进行对比,如图2所示,2种不同的函数都可以有效地跟踪原始曲线。
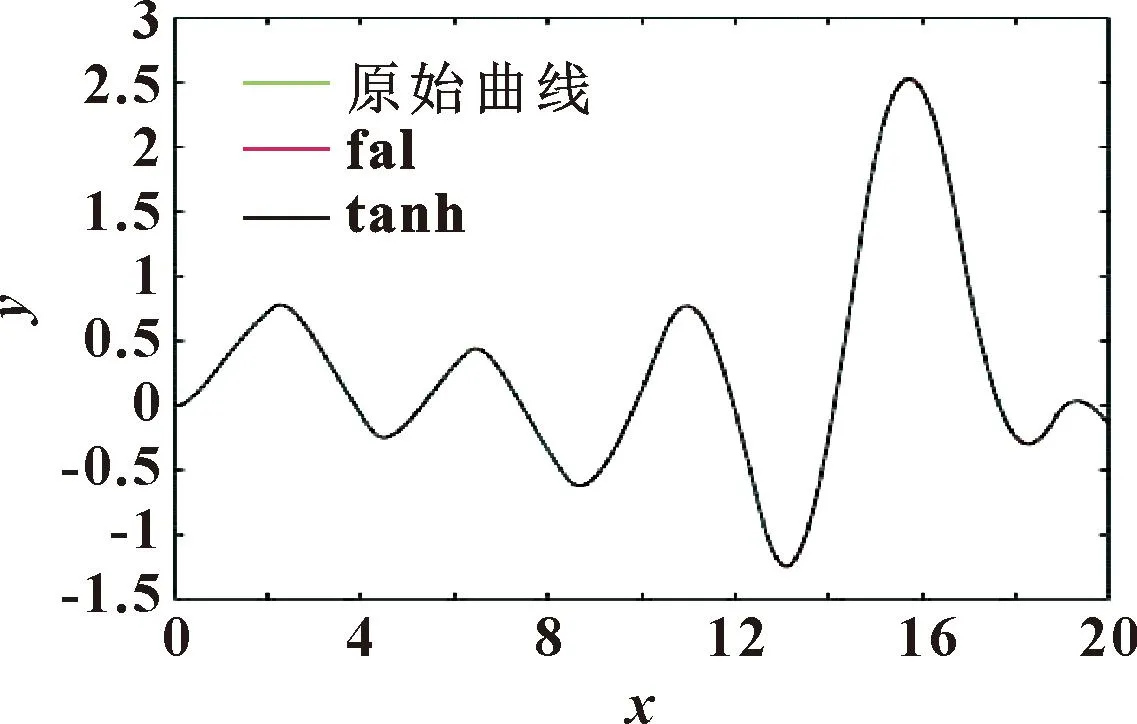
图2 HTF与fal观测效果Fig.2 HTF and fal observational effects
将图2局部放大后得到图3,可以看出:HTF的观测效果优于fal的观测效果。因此,使用HTF代替fal函数是可行的。

图3 图2的局部放大Fig.3 Partial enlarged view of Fig.2
3 FITSMC的设计
当考虑参数不确定性的影响时,PMSM的运动方程可以表示为
(8)

选取参数g和d,其表达式如下:
(9)
等式(8)可以改写为
(10)
其中:g采用自适应律估计,负载扰动d采用ESO和前馈观测,以获得更好的控制效果。假设一阶系统状态方程表示为
(11)
其中:h是一个大于零的常数;f(x1)表示有界非线性扰动函数;u(t)是控制输入。

(12)
(13)
由参考文献[24]可知:PMSM 的速度反馈信号由z1观察,负载扰动转矩d由z2观察,可以实现干扰的补偿。另外,根据参考文献[24]中的参数选择原则,可以选择参数β1、β2、β3且满足β1-β2β3>0。
速度跟踪误差定义为
(14)

则速度跟踪误差方程的变化规律可表示为
(15)
文中以速度跟踪误差e为自变量,选取积分滑模面为
dτ
(16)
为对比不同滑模面的效果,选取:
(17)
其中:q1、q2是满足q2>q1>0的奇数;α>0;β>0。
为了加快逼近过程并抑制滑模表面的颤振,选择终端滑模逼近律。终端滑模趋近律表示为
(18)
同时选取新趋近律(New Reaching Law Sliding Mode Control,NRSMC):
(19)
其中:m、n是正数,且0<λ<1。可以得到速度环控制器的输出信号,结合式(15)(16)(18)得到q轴电流参考值:
αsgn(e)+β|e|q1/q2sgn(e)]
(20)

(21)
4 稳定性分析
(22)
结合式(16)可以变为
=-s[m|s|λsgn(s)+ns]≤0
(23)

5 系统仿真
为验证文中提出方法的可行性,基于MATLAB/Simulink搭建了永磁同步电机控制系统的仿真模型。
基于FITSMC+ESO的PMSM调速系统仿真框图如图4所示。可以看出:ESO 估计负载扰动并将结果补偿到速度控制器FITSMC中,而SMSC代替了传统速度环中的 PI 控制器。设定电机的参数见表1。
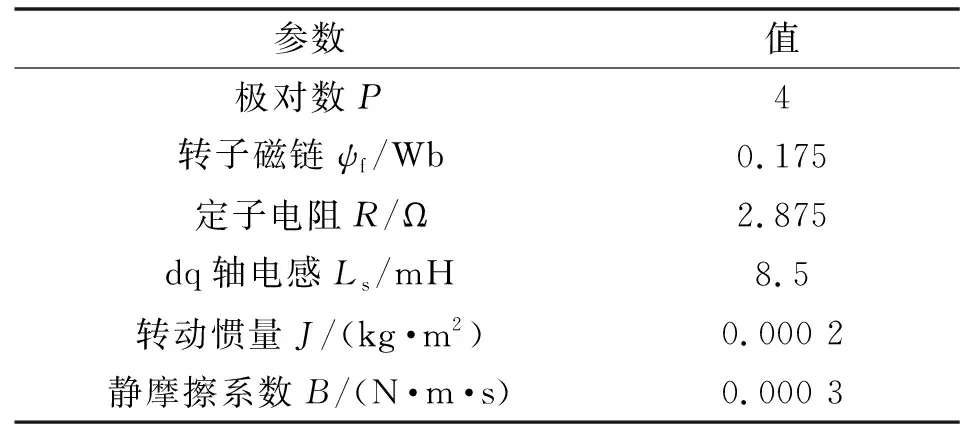
表1 电机参数Tab.1 Motor parameters

图4 PMSM调速系统框图Fig.4 Block diagram of PMSM speed-regulation system
仿真参数设定为:α=100,β1=160,β2=160,β3=0.85,q1=3,q2=5,k=55,m=2,β=0.3,n=55。
仿真分为2组:第一组模拟时间设定为0.4 s,给定速度为1 000 r/min;另一组模拟时间也为0.4 s,给定速度为1 000 r/min,但在0.2 s时加入负载。
第一组仿真参数模拟结果如图5-6所示,可以看出:与传统的SMC和NRSMC相比,ESO+FITSMC达到稳定运行状态的时间更短,超调更小,能更快到达稳定状态;相比之下,传统的SMC具有较大的超调量,NRSMC的效果居中。从图6中可以看出:FITSMC到达稳定只需要0.007 4 s,NRSMC到达稳定需要0.010 2 s,SMC到达稳定需要0.010 4 s。同时,当达到稳定时ESO+FITSMC的抖振为10 r/min,抖振较小。因此,基于FITSMC+ESO的系统具有良好的动态性能和较强的鲁棒性。

图5 不同SMC在1 000 r/min下的仿真结果Fig.5 Simulation results of different SMC at 1 000 r/min
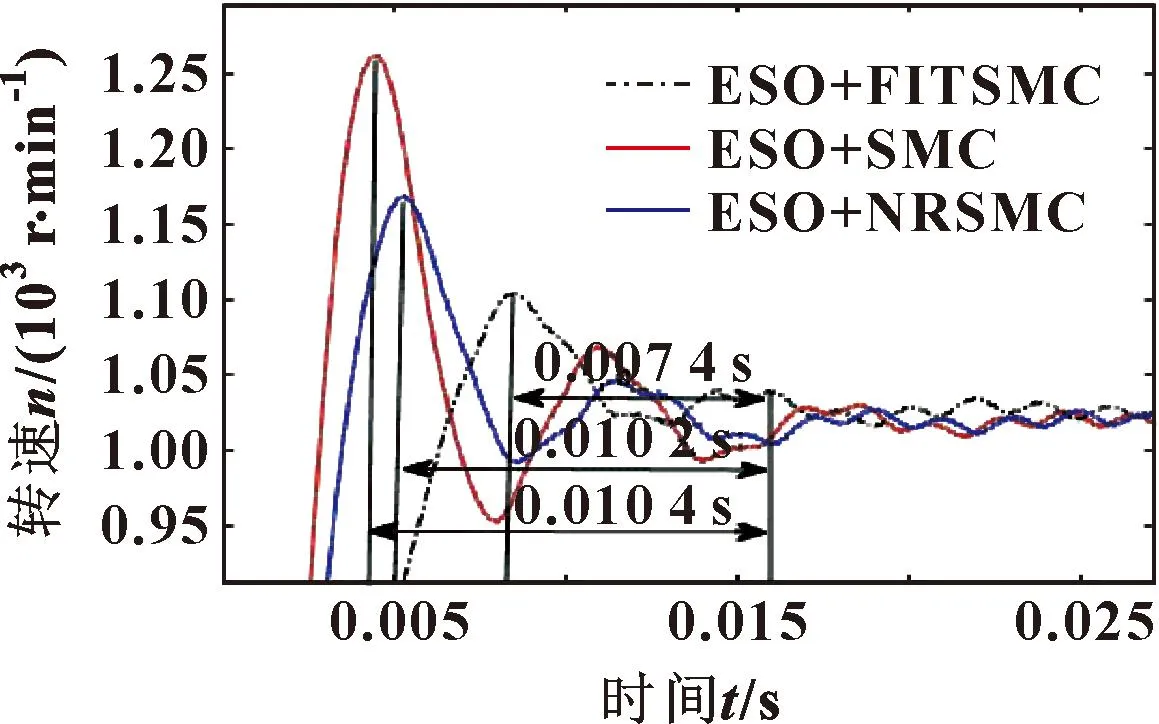
图6 图5的局部放大Fig.6 Partial enlarged view of Fig.5
图7所示为不同函数的观测效果,可以看出:tanhESO具有较小的超调,且更快地到达给定的速度,进一步验证了对于ESO的改进是可行的。
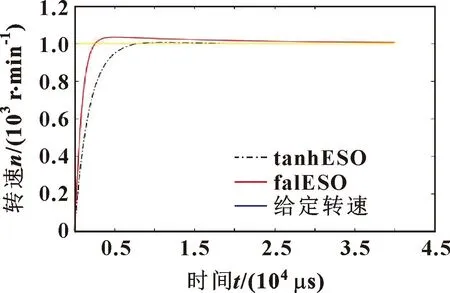
图7 tanh与fal函数对比Fig.7 Function comparison of tanh and fal
第二组仿真参数模拟效果如图8-9所示,可以看出:ESO+FITSMC空载运行时的效果和图5、6的效果相同,它在更短的时间内达到给定速度,且具有小超调。从图9中可以看出:在0.2 s时突加负载,ESO+FITSMC能够更快地反应,且只需要0.002 s就能调整到给定值;此外,转速只下降了40 r/min。实验结果验证了所提出的ESO+FITSMC对干扰具有更好的鲁棒性。
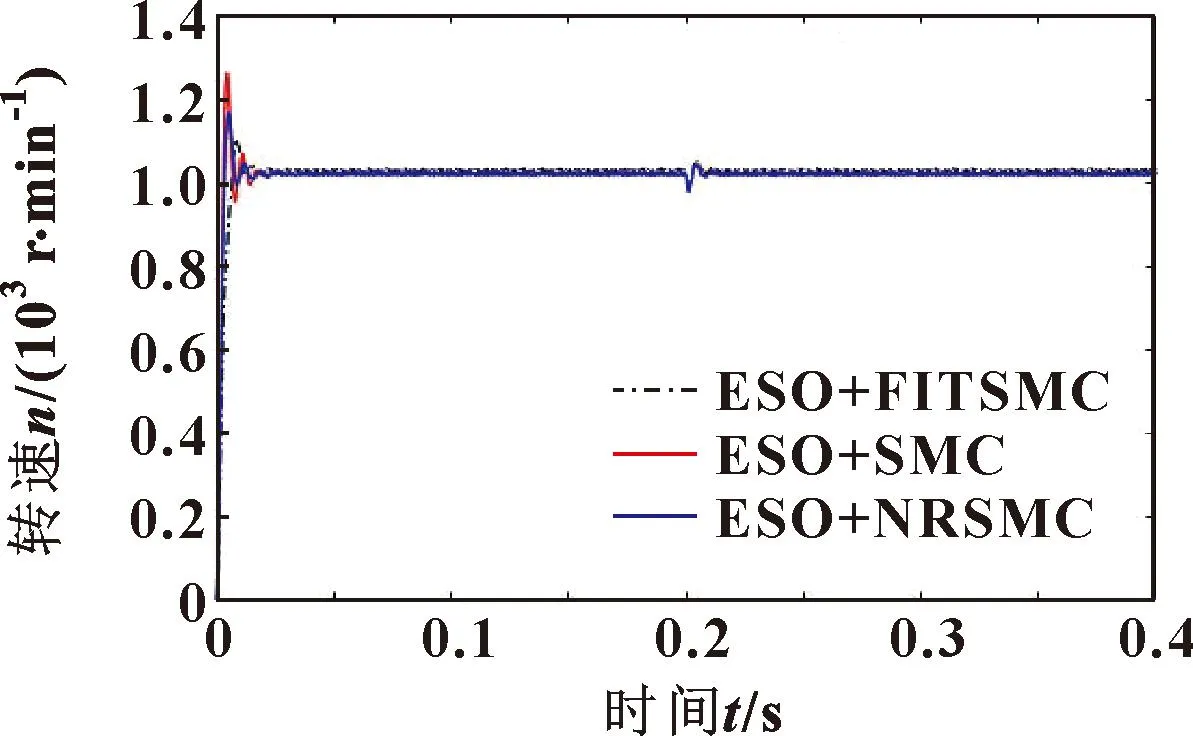
图8 0.2 s突加负载时不同SMC在1 000 r/min下仿真结果Fig.8 Simulation results of different SMC at 1 000 r/min under 0.2 s sudden load
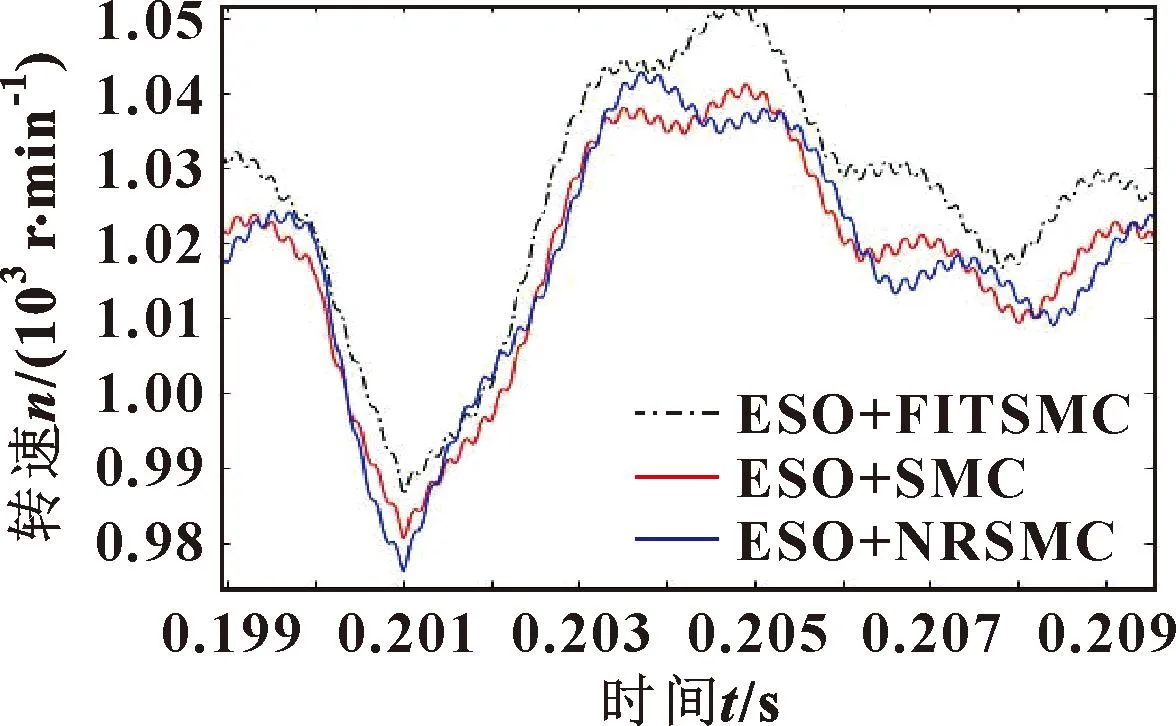
图9 图8的局部放大Fig.9 Partial enlarged view of Fig.8
6 结论
文中提出的FITSMC控制器在跟踪误差远离平衡点时提供了更快的误差收敛速度。基于双曲正切函数的ESO估计负载扰动,并将它作为前馈补偿添加到速度控制器FITSMC中,采用FITSMC替代传统的PI控制器可以有效地降低动态速度跟踪误差。通过与传统方法进行比较,验证了所提方法(FITSMC+ESO)的优越性。