基于效能和时间的多旋翼破障无人机能力分析
2024-01-15屈高敏董彦非李继广邵朋院
屈高敏, 董彦非, 李继广, 邵朋院, 谭 健
(西安航空学院,西安 710000)
0 引言
破除障碍任务是登陆作战工程的重点内容[1]。在抗登陆障碍场中,作战任务需协同多兵种,发挥各自优势[2]。多旋翼无人机具有操作简单、可垂直起降、空中突击速度快、雷达侦察反射截面积小、可靠性高、低空定位悬停精度高等特点,同时因受制于技术发展水平,飞行时间短、载重较轻、智能化程度不高、抗干扰性能不高等不足在作战应用中的短板也比较突出。
因此,根据其技术现状和发展趋势,针对特定障碍[3],如水际滩头的轨条砦、岸滩上的三角锥、地雷场、碉堡、阻绝墙等的破除需求[4-5],扬长避短,充分发挥无人机优势,作为传统手段受限比较多的破障装备的有益补充,无人机可在作战效能上取得显著提升[6-8]。
本文根据多旋翼无人机破障的作战环境和特点,基于ADC评估模型[9-12],建立了破障效能评估体系和模型。基于效能和完成任务时间的分析,对破障无人机的使用提出了建议。
1 破障作战任务分析
1.1 典型威胁环境
目前,多旋翼破障无人机作战中面临的典型威胁来自弹炮一体的野战防空环境。现代战场的突然性、破坏性和战区的广阔性都大为增加,在战术和技术上更加强调各兵种协同作战、反应迅速和快速机动能力。对于防空系统,来自空中的威胁包括精确制导武器、巡航导弹、遥控飞行器、武装直升飞机、战术飞机,以及有人驾驶战机从远距离或高空发射空对地导弹等。这些威胁的共同特点是低空入侵、截面积小、不易被侦察发现、电子干扰困难、反应时间短促,因而难于将其击落,一旦被其突破防空防线,因其命中率和威力非常强大,这种威胁往往是致命的[13-15]。因此,现代化防空作战的地面防空手段必须具备:全天候作战能力、全空域反击能力、强抗电子干扰能力、高密集防空火力、快速机动转移能力、行进间作战能力和多目标攻击能力等。
1.2 作战任务需求
以渡海登岛作战行动中破除海滩上的轨条砦障碍为典型应用场景。海岸线高低潮位之间一般布设有3~5行轨条砦障碍,每行沿水际滩头绵延约数十千米,相邻2个轨条砦有一定的间距,行间位置错开,呈“品”字形排列。涨潮时,3行轨条砦墩座会没入水中,轨条部分露出水面,落潮时近岸的两行轨条砦完全暴露在海滩上,近海的一行会有部分墩座露出水面。
进行登陆作战时,为了开辟部队上岸通路,需要对障碍区域内的轨条砦实施定点爆破,摧毁墩座,削弱甚至消除轨条对登陆部队舰船的阻碍,保证登陆部队能够迅速突击上陆。由于轨条砦障碍区通常位于海岸线的高低潮位之间,落潮时轨条砦会露出水面,而涨潮时部分轨条砦又会没入水中,因此进行破障时需要充分考虑轨条砦的状态,确保能顺利破除露出水面和没入水中的两类轨条砦目标。其中,I类目标轨条砦水泥墩露出水面,II类目标轨条砦水泥墩淹没在水下,只露出部分轨条。
2 破障无人机的类型及特点
基于威胁环境和作战任务需求,为了解决破障任务,目前破障无人机有两种研制思路:一种是自寻的爆破,如伞形多旋翼无人机;另一种是投挂式爆破,如环形多旋翼无人机。
2.1 伞形多旋翼无人机
伞形多旋翼无人机是自寻的爆破的一种,属于自杀式的,发射后不管,主要以集群方式使用。伞形多旋翼无人机4个机臂可折叠放入布撒器内,内置摄像头可进行末端视觉导引,内置聚能弹药,爆炸时可形成射流摧毁轨条砦。
设置应用场景:无人直升机一次携带40枚伞形多旋翼无人机,在地空火力掩护下,飞抵目标区域附近约80 m高度,对目标区域进行侦察,根据侦察结果和任务要求进行任务规划,为伞形多旋翼无人机分配任务目标,然后从海面上抛撒伞形多旋翼无人机,伞形多旋翼无人机离开母机后自主飞向目标,完成破障任务。具体破障作战任务流程如图1所示。
2.2 环形多旋翼无人机
环形多旋翼无人机是投挂式爆破的一种。在作战时,多旋翼破障无人机需挂载环形破障弹药,执行破障任务。其中,4个弹药可折叠,螺旋桨可折叠,环形弹可直接挂到轨条砦的钢轨上。
主要优点为续航时间长、速度快、可垂直起降、结构简单和操纵灵活,缺点为体积重量大、便携性差、成本高和发射不方便。
有两种使用方式:1) 单兵使用,用于破障扫残;2) 集群使用,可从舰艇上起飞,进行编队飞行,破除II类轨条砦目标。
3 多旋翼破障无人机效能评估指标体系和模型
3.1 效能评估体系
基于以上战场环境及多旋翼无人机的作战特点,依据效能评估体系的原则和步骤,建立多旋翼无人机破障效能评估指标体系。
遵循系统性、独立性、针对性、简明性几方面的原则,同一层次不同指标之间的关系应相互独立,对不同的任务需选取对应的评估指标,在满足评估要求和决策所需信息的条件下,突出重点,优化指标规模,避免冗杂的指标体系[16-17]。
选择“多旋翼无人机破障效能”作为一级指标。根据美国工业界武器系统效能咨询委员会(WSEIAC)建立的效能模型[18],WSEIAC效能评估模型,二级指标为可用性A、可信性D和固有能力C[19]。其中:二级可用性指标A包括平均故障间隔时间(MTBF)和平均故障修复时间(MTTR)两个三级指标;二级可信性指标D包括任务可靠度和安全性[20-22]两项能力指标;二级作战能力指标C以分系统/设备为中心进行分解。三级能力指标为飞行能力、导引能力、生存能力和破障能力等。三级能力指标还可以继续分解出四级指标。具体的效能评估指标体系如图2所示。

图2 多旋翼无人机破障总体效能评估指标体系
3.2 效能评估模型
多旋翼无人机破障的效能E主要由可用性A、可信性D、固有能力C三部分组成。建立的ADC模型为
E=A·D·C。
(1)
3.2.1 可用性A
可用性代表武器系统在最初执行任务时所处的状态指标,是对武器系统在执行任务准备阶段可用程度的度量,映射了武器系统的使用准备程度。由于无人机在执行任务时,只有两种工作状态,即“正常”与“故障”,无人机的可用性就可以表示为
A=[a1,a2]
(2)
式中:a1表示任务开始时,无人机处于正常工作状态的概率;a2表示任务开始时,无人机处于故障状态的概率。则
(3)
式中:TMTBF表示MTBF,即无人机在任务准备阶段的平均故障间隔时间;TMTTR表示MTTR,即无人机在任务准备阶段的平均故障修复时间。
3.2.2 可信性D
可信性代表武器装备在任务过程中所处的状态指标,影射了武器系统在使用过程中所处的各种状态的集合。任务过程中的某种状态,都可以经过武器系统自身的变化和维护修理,转化为其他状态。假设武器系统在开始执行任务时有n种可能的状态,武器系统在任务初始阶段可能处于任何一种状态,在任务过程中可能转化为n-1种其他状态,也就是说武器系统有n种状态转化可能,因此可信性D可表示为
(4)

对于多旋翼无人机的可信性,起决定作用的因素是飞机的任务可靠性,任务可靠性的计算方法是先建立任务可靠性模型,由模型中各模块的可靠度计算总的可靠度值。
根据需要和数据情况,在可信性中可以考虑安全性因素。
3.2.3 固有能力C
多旋翼无人机的固有能力主要由生存能力、飞行能力、导引能力和破障能力四部分组成。无人机破障时,经过飞行→导引→破障,完成一个打击流程,有相关性,则飞行能力、导引能力和破障能力处理为相乘的关系。生存能力单独为一个分项,建立分项能力综合的数学模型

(5)

(6)
当指标为极小型时,其无量纲指标为
(7)
模型中权重取值参考GJB6704-2009中数据,未涉及的采用专家打分以及层次分析法确定,下面的评估模型类似。对于没有精确数学模型的分量,本文统一采用能力等级(1~10级,1为最低,10为最高)给出。
1) 生存力评估模型。
根据多旋翼无人机的特点及作战环境,选取在战场环境中对生存力起关键作用的能力和参数对其生存力进行评估。与生存力Sur相关的参数包括:结构性参数(致命性部件比例Plc、致命性部件余度概率Pyd、致命性部件防护/遮挡概率Pfzc、致命性结构部件的平均安全系数f)、电子干扰(GNSS抗干扰能力Kgns、数据链抗干扰能力Ksjl)、被弹面积Sbd。具体算式为

(8)
式中:η1~η7表示各项指标参数的权重值,可采用层次分析法(AHP)得到;Sbd表示多旋翼无人机在水平面上的投影面积,即被弹面积,弹丸与目标遭遇时,其被弹面积对命中概率和毁伤概率有很大的影响[9],进而影响其生存力。一般采用弹道对目标在水平面或者垂直面上进行投影来确定目标的被弹面积[10]。
2) 飞行能力。
与飞行能力Fl有关的参数包括抗风能力Wr、飞行速度V、续航时间Te和拉总比Fg,算式为
Fl=Wr·(0.15·Te+0.45·Fg+0.4V)。
(9)
3) 导引能力。
导引能力用Gui表示,导引包括两个阶段。首先是根据任务分配的障碍物位置坐标,通过卫星导航到目标附近,然后通过弹载双目视觉技术,实现精准定位轨条砦目标。
Gui=Gnss·Zd
(10)
式中:Gnss表示GNSS导引能力;Zd表示自主视觉导航能力。
4) 破障能力。
总破障能力=I类目标破障能力×X%+
II类目标破障能力×Y%
(11)
式中:I类目标破障能力及II类目标破障能力,本文按照能力等级给出;X%表示I类目标所占百分比;Y%表示II类目标所占百分比。
4 计算与分析
选取5种不同型号的无人机U1,U2,U3,U4,U5,其中,U1,U2属于伞形多旋翼无人机,U3,U4,U5属于环形多旋翼无人机,分别计算无人机生存能力、飞行能力、导引能力和破障能力,再综合计算整机系统效能。其中,无人机生存能力下的各项分指标的权重值分别为η1=0.2,η2=0.1,η3=0.1,η4=0.15,η5=0.15,η6=0.15,η7=0.15。
4.1 单点破障效能计算分析
选用5种不同型号无人机的结构和性能参数,结合表1所示靶场破障试验数据计算得到的生存能力各项指标评估如表2所示,当I类目标占比50%时,效能计算结果如表3所示。
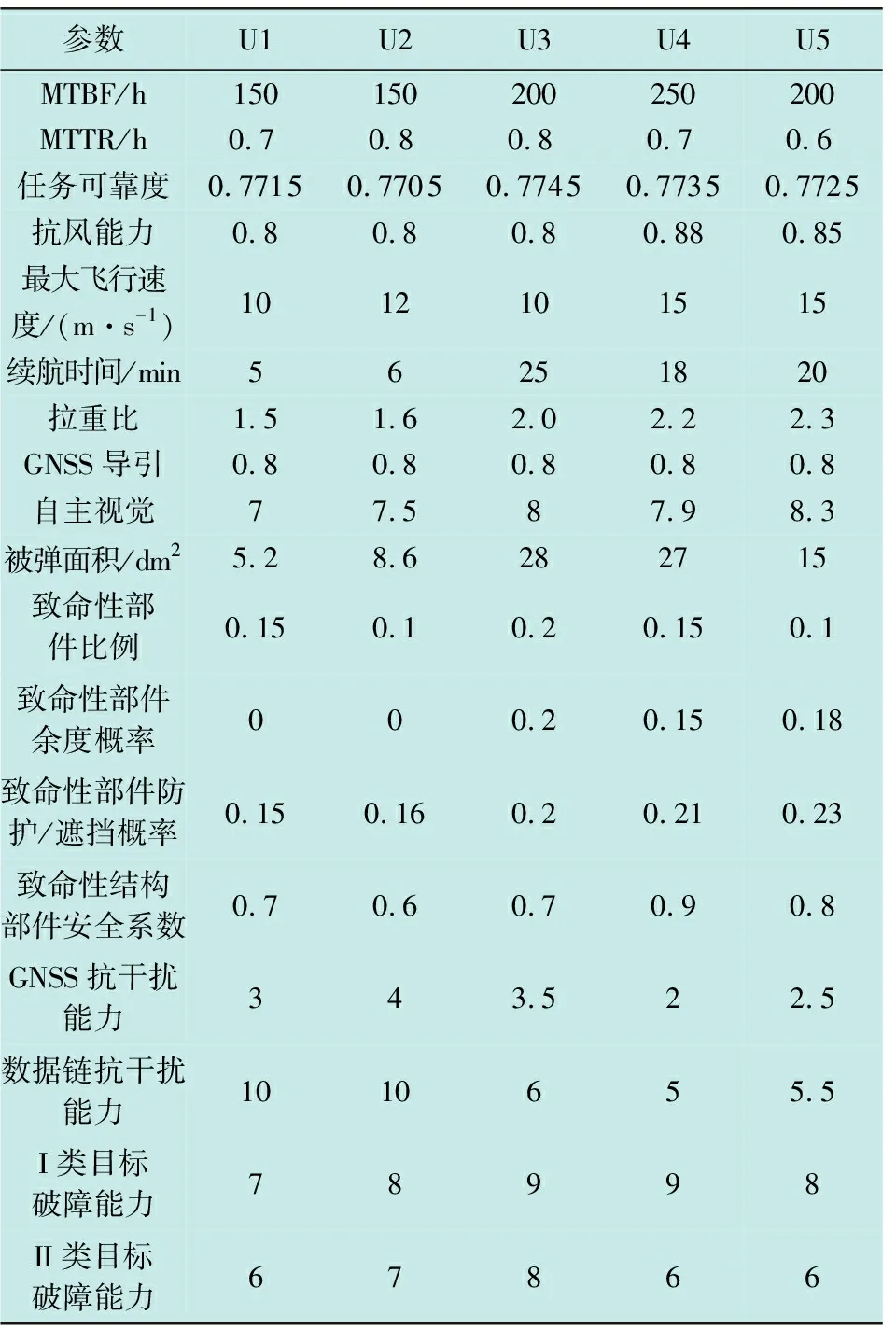
表1 不同型号无人机的结构和性能参数

表2 不同型号无人机的生存能力各指标评估表

表3 不同型号无人机效能评估计算结果
从表2、表3计算结果总体来分析效能排序为EU1EU2EU3EU4EU5,即环形多旋翼无人机总体效能高于伞形多旋翼无人机,这是因为环形多旋翼无人机有高于伞形多旋翼无人机的飞行能力。
从同类型无人机效能来分析,U1与U2相比,各分项能力大致相同,虽然U1的被弹面积小,生存力大,但是U2的飞行能力高于U1,从而使U2的最终效能高于U1。U5与U3,U4相比,U5因为被弹面积最小,所以生存力最大,加之有较高的飞行能力,致使最后的效能最大。U3与U4相比,其他分项能力大致相同,由于U3的飞行能力小于U4,导致其效能小于U4。
当I类目标所占比例不同时,5种不同型号无人机的破障能力、作战能力及效能评估结果如表4所示,效能评估图见图3。

表4 I类目标不同比例时效能评估

图3 I类目标所占比例不同时的效能评估
从图3可以看出,随着I类目标所占比例的增加,5种不同型号无人机的破障能力也在不断增大,分别增加了16%,14%,12%,50%,33%,与此同时,固有能力分别增加了3%,4%,6%,25%,16%,相应地,其效能也分别增加了3%,4%,6%,25%,16%。这是因为5种不同型号无人机对I类目标的破障能力均大于II类目标,且无人机U4对I类目标有最大的破障能力9,无人机U1对I类目标有最大的破障能力7。
当全部为I类目标时,总的效能排序为EU1EU2EU3EU4EU5。无人机U5的效能值最高,由于其具有较高的飞行能力和导引能力。无人机U4的效能值排第二,是因为其对I类目标的破障能力最大为9,破障能力较大。
当全部为II类目标时,总的效能排序为EU4EU1EU3EU2EU5。无人机U5的效能值最高,无人机U2的效能值排第二,是由于其被弹面积小,能够有较高的生存能力。无人机U4效能值排第五,因为其对II类目标的破障能力最小为6。
4.2 完成任务时间分析
战场想定:海岸线高低潮位之间布设有4行轨条砦障碍,2行为完全暴露的I类目标,另外2行为II类目标,如图4所示。每个轨条砦由墩座和轨条两部分组成,墩座一般为钢筋混凝土结构,底边长为1 m,轨条砦行间距为7 m,每行沿水际滩头绵延2000 m,相邻2个轨条砦间距为3.5 m,行间位置错开,呈“品”字形排列。
根据作战需求,需开辟2条宽约12 m通道,2个通道之间相距40 m。分析可知,每条通道中包含7个I类目标障碍和7个II类目标障碍。现在使用不同的多旋翼无人机进行障碍扫除任务,对比其所用的时间。
舰艇携带破障无人机停泊在距目标1500 m处。伞形多旋翼无人机U1,U2的速度分别为10 m/s与12 m/s(其载机——无人直升机的速度为45 m/s),环形多旋翼无人机U3,U4,U5的速度分别为10 m/s,15 m/s,15 m/s。当一个障碍物被摧毁80%时,本文假定其已经全部被摧毁。
1) 作战方式1(采用自寻的式破障)。
一架无人直升机一次携带40枚伞形多旋翼无人机U1,对水际滩头障碍目标侦察,根据战场实际情况将任务装订到伞形多旋翼无人机上,用时15 s,从舰艇上起飞在距离目标100 m处,抛撒28枚伞形无人机用时15 s(抛撒完伞形无人机后直升机立即返回),其中14枚伞形多旋翼无人机寻找海岸上的14个I类目标并进行爆破,14枚伞形无人机对II类目标进行爆破,寻找目标进行爆破用时15 s,第一波打击结束。进行毁伤评估,用时10 min。还未清除的I类目标有14×0.3=4.2,取4个,II类目标有14×0.4=5.6,取6个。
对于未清除的目标进行第2波打击,根据毁伤评估状态将任务装载到伞形无人机上,用时15 s,直升机携带载有任务的伞形多旋翼无人机,从舰艇上起飞在距离目标100 m处,抛撒下20枚伞形无人机(抛撒完伞形无人机后直升机立即返回),其中,8枚伞形多旋翼无人机寻找海岸上的4个轨条砦并进行爆破,12枚伞形多旋翼无人机寻找水里的6个轨条砦并进行爆破,第2波打击结束。进行毁伤评估,还未清除的I类目标有0.3×0.3=0.09,II类目标有0.4×0.4=0.16,可认为障碍物已经全部清除,任务结束。
打开2条通道总共用时
(12)
式中:tij指每一个阶段所需要的时间,i表示第i次打击,j表示所处的阶段(j=1,侦察装订任务;j=2,直升机飞到距离目标100 m处;j=3,抛撒无人机;j=4,无人机飞到目标附近;j=5,寻的爆破;j=6,毁伤评估)。
伞形多旋翼无人机U2与U1作战模式相同。总共用时TU2=199.55 s。
2) 作战方式2(采用投挂式破障)。
2架环形多旋翼无人机U3装载任务,15 s后从舰艇出发,其中一架对海滩上的2行4个轨条砦进行爆破除障,另外一架对海水里的2行4个轨条砦进行爆破除障,寻找目标并进行爆破用时15 s。一次爆破之后,2架无人机返回舰艇,再次装载任务及弹药用时40 s。2架无人机继续飞到目标上空,寻找剩余的4个海岸上的轨条砦及4个海水里的轨条砦并进行爆破,无人机返回。无人机第3次装载任务,再进行一次破障打击,完成后,无人机第4次装载任务,再进行一次破障打击。第1波打击任务完成,进行毁伤评估,用时10 min。还未清除的I类目标有14×0.1=1.4,取2个,II类目标有14×0.2=2.8,取3个,假定还未清除的目标都在最远处。
对于未清除的目标进行第2波打击,重新装订任务及挂弹,2架环形多旋翼无人机U3从舰艇出发,其中一架对海滩上的2个轨条砦进行爆破除障,另外一架对海水里的3个轨条砦进行爆破除障,寻找目标并进行爆破,2架无人机返回舰艇。第2波打击任务完成,进行毁伤评估。还未清除的I类目标有2×0.1=0.2,取值小于等于0.2,可认为I类目标障碍物已经全部清除,II类目标有3×0.2=0.6,取1个,假定还未清除的目标在最远处。
对于未清除的目标进行第3波打击,重新装订任务及挂弹,1架无人机从舰艇出发,对海水里的1个轨条砦进行爆破除障。寻找目标,进行爆破,返回。第2波打击任务完成,进行毁伤评估。还未清除II类目标有1×0.2=0.2,取值小于等于0.2,可认为II类目标障碍物已经全部摧毁,任务结束。
打开两条通道总共用时
(13)
式中:j=1,装订任务;j=2,从舰艇起飞到目的地1;j=3,寻的爆破;j=4,返回舰艇;j=5,挂弹和装订任务;j=6,从舰艇起飞到目的地2;j=7,寻的爆破;j=8,返回舰艇;j=9,挂弹和装订任务;j=10,从舰艇起飞到目的地3;j=11,寻的爆破;j=12,返回舰艇;j=13,挂弹和装订任务;j=14,从舰艇起飞到目的地4;j=15,寻的爆破;j=16,返回舰艇;j=17,毁伤评估。
环形多旋翼无人机U4,U5与U3作战模式相同。总共用时TU4=3346.1 s,TU5=3346.1 s。
5种不同型号无人机执行任务所需时间如下:U1为205.02 s,U2为199.55 s,U3为3966.6 s,U4为3346.1 s,U5为3346.1 s。
5种不同型号无人机执行任务所需时间,TU3>TU4>TU1>TU2,TU4=TU5。在相同的作战任务下,U1,U2完成任务所需时间最短,U4,U5用时次之,U3用时最长。分析可知,执行任务所需时间与无人机的作战方式有关,集群使用的U1,U2有时间上的优势,用时远短于U3,U4,U5。从同类型的无人机分析,无人机自身的速度越大,执行任务所需时间越短,由于U1速度小于U2,所以执行任务所需时间长于U2;由于U3速度小于U4,所以执行任务所需时间长于U4。
5 结论与建议
1) 从单点破障效能上看,5种不同型号无人机均可以达到破除水际滩头障碍的目的,并且投挂式爆破的效能值高于自寻的式爆破。投挂式具有精准爆破的功能,适用于登陆战场的障碍扫残。自寻的式具有大面积摧毁目标的功能,适用于目标较多的战场任务。在同种类型无人机中,飞行能力较强,导引能力强,被弹面积较小的无人机,具有较高的破障效能。不同无人机对两类目标的破障能力不同,也会影响其最终的效能。
2) 从完成任务时间上分析,自寻的式多旋翼无人机用时远少于投挂式无人机,这主要得益于自寻的式无人机的集群使用,集群使用可以大大地缩短所用时间。当确定了作战方式后,无人机的速度越快,完成任务时间越短。
在实际登陆作战中,时间是决定作战任务成败以及战场损失的核心,在满足破障需求的前提下,应该优先选用总体破障时间最短的自寻的式爆破无人机,后续的扫残阶段,可以选用投挂式爆破无人机进行扫除任务。
在后续研究中,可以将费用因素考虑在内,研究不同无人机破障作战的效费比;同时,考虑对抗环境和无人机战损,使研究结论更贴近作战实际。