汽车电子加速踏板可靠性控制和故障处理机制研究
2024-01-11文德华
文德华
摘 要:为确保汽车电子加速踏板信号的可靠性,对踏板位置传感器信号提出一种限幅消抖滤波、中位值平均滤波、一阶低通滤波,进行3次滤波消除信号突变,并结合“强制法规”对加速踏板位置传感器信号进行故障诊断。在Simulink/Stateflow中建立加速踏板信号检测模块、故障诊断模块、信号选择模块等。测试了整个控制过程的可靠性。结果表明,踏板信号出现线路故障或同步性异常时能准确判断出各种故障状态,且故障后的信号处理措施科学、实用,符合行车安全要求。
关键词:加速踏板信号 一阶低通滤波 诊断 故障处理机制
1 引言
纯电动汽车在行驶过程中,驾驶员的驾驶意图较大程度上通过加速踏板信号来反映。踏板信号的问题,无论是由于踏板本身的机械问题,还是由于踏板位置传感器的故障,都会导致监控控制器发送错误的扭矩命令,这可能会导致传动系统传递的扭矩过大[1],影响行车安全。
目前,国内外对可靠性和故障处理机制研究较少,大多集中在防误踩识别上面[2-3],文献[4-5]对踏板信号的滤波处理,文献[6]集中研究了失效诊断和安全机制。本文提出一种联合滤波算法,并对加速踏板传感器信号进行故障诊断,设计故障处理机制,保证行车安全。
2 踏板信号处理
2.1 加速踏板原理
汽车电子加速踏板即转变踏板位移为模拟量信号输出,基于踏板、电路、位移传感器三部分构成。在纯电动汽车中,加速踏板开度值多使用非接触式传感器来测量,相较于接触式传感器有更长的使用寿命和较高可靠性。但是加速踏板都在一定程度上存在短路、断路、电磁干扰等直接影响着踏板信号的准确可靠传输。加速踏板通过两个独立传感器,且两路信号变化呈现双倍关系,以此双冗余结构的加速踏板,可自主诊断加速踏板信号,并进行可靠性设计。
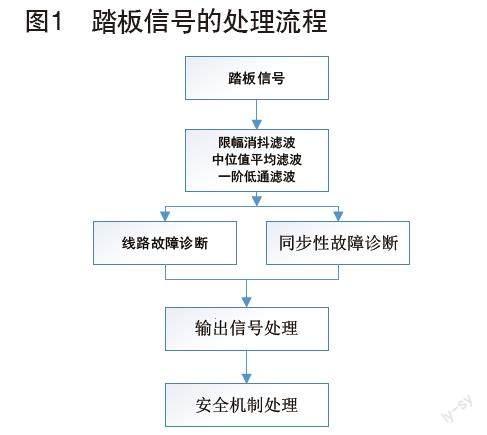
踏板信号的处理流程见图1,踏板信号经过限幅消抖滤波,中位值平均滤波,一阶低通滤波后,分别进行线路故障诊断和同步性故障诊断,根据当前的故障类型,进行综合决策,最终输出踏板开度信号,进行安全机制处理。
2.2 联合滤波算法
在纯电动车上加速踏板一定程度存在短路、开路、电磁干扰等直接影响踏板信号的准确传输,因此,加速踏板传感器输出的电压模拟信号传送给整车控制器处理之前,要经过滤波算法消除信号中的抖动和干扰,从而得到较准确的信号。
为得到灵敏性高和平稳性好的信号,采取联合滤波算法:
(1)限幅消抖滤波,根据经验判断两次采样允许的最大偏差值A,每次采新值时判断:若本次值与上次值之差<=A,则本次有效;若本次值与上次值之差>A,本次无效,用上次值代替本次。
(2)中位值平均濾波。连续采样多次次,按大小排列,取中间值的平均值为本次有效值。
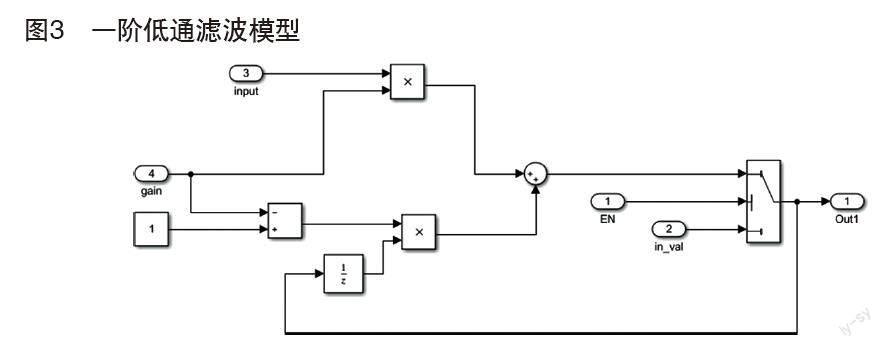
(3)一阶低通滤波,其数学微分方程为:
(1)
式中:R,C 分别为RC电路的电阻和电容值;x(t)为系统激励源;y(t)为系统响应;t为采样时间。
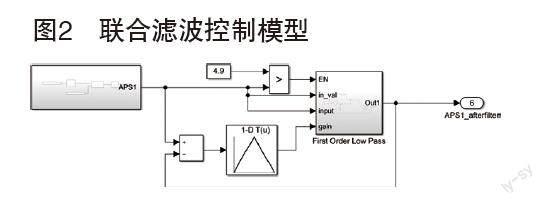
踏板信号经过限幅消抖滤波和中位值平均滤波后,送到一阶低通滤波模型处理,当滤波程度大时,信号平稳,但是灵敏度差,当滤波程度小时,信号响应快,但平稳性差。在联合滤波模型中增加滤波程度的控制逻辑,当前加速踏板采样值和上次加速踏板滤波后采样值做差,根据差值来查表得到不同的滤波程度。使系统能较好的满足信号响应和平稳性的要求。
从图4可以看出联合滤波模型对杂波有良好的过滤效果,信号灵敏度好,平稳性优良。
2.3 故障诊断
2.3.1 超限值检测处理
将输入的踏板加速信号与设定的最大值和最小值进行比较,能够检测出信号传输电路对控制器短路故障、对地短路开路等故障。以加速踏板信号1为例,信号先进行上限和下限比对,如果超过了上限值则短高错误故障计数以200ms周期开始累加,累加至1S,错误标志APS1_Hiv_error置1,如果低于下限值则短地错误故障计数增长至2S,错误标志 APS1_Lov_error置1。否则经历故障轮巡时间之后,确认没有故障,故障标志位APS1_Hiv_error,APS1_Lov_error为0。
2.3.2 同步校验
对两路加速踏板信号分别进行短路故障处理后,还要通过判断加速踏板信号的同步性是否合理,来最终选择加速踏板位置传感器信号输出。图8为同步性校验控制模型,首先进行同步异常判断,将联合滤波处理后得到的两路输出信号 APS1_Per和APS2_Per相差再取绝对值,若该值大于4%,且持续时间超过2S,则报出同步性故障,APS_Syn_error置1。
2.4 信号选取和安全机制处理
首先判断2个传感器的线路故障,若两个传感器没有线路故障,再判断同步性故障,若没有同步性故障,则加速踏板传感器信号输出选用APS1_afterfilter。若2个传感器有一个出现线路故障,则输出另一路传感器信号;若2个传感器都出现线路故障,则输出踏板开度0,并且VCU控制电机强制切换为怠速模式,进入跛行状态;若2个传感器都没有线路故障,则进入同步性诊断,若出现同步性故障,则踏板信号1的权重取0.6,踏板信号2的权重取0.4,输出踏板开度。
3 仿真测试
图9中,在时间戳5S处,加速踏板信号1电压低于阈值,在第7S处APS1_Lov_error置1,报出加速踏板信号1短地故障。在第10S处加速踏板信号1电压恢复正常,在第12S处APS1_Lov_error置0。
图10中,在时间戳14.9S处,加速踏板信号1电压高于阈值,在第15.9S处APS1_Hiv_error置1,报出加速踏板信号1短高故障。在第19.2S处加速踏板信号1电压恢复正常,在第21S处APS1_Hiv_error置0。
图11中,在时间戳13.9S处,加速踏板1的开度比加速踏板2高3%,未达到阈值4%,没有报出同步性故障;在时间戳19.9S处,加速踏板1的开度比加速踏板2高5%,超过了阈值4%,约延时2S后,同步性故障标志APS_Syn_error置1。
4 结论
基于加速踏板信号的特性,建立了信号联合滤波、故障诊断模型,通过测试验证,结果表明:
1)线路故障、同步性故障可以及时的诊断出来,发生故障后的信号处理逻辑合理,保证行车安全性。
2)采用联合滤波算法,能够有效消除干扰信号,能兼顾灵敏性和平稳性,保证信号可靠。
参考文献:
[1] J. Zhang, A. Amodio, B. Aksun-Guvenc, G. Rizzoni and P. Pisu, "Investigation of torque security problems in electrified vehicles", Proc. ASME 2015 Dyn. Syst. Control Conf., 2015.
[2]胡振奇,朱昌吉,李君,等.汽车防误踩加速踏板系统的研发[J].汽车工程,2011,33(8):713-716.
[3]魏丽.汽车油门防误踩智能控制装置设计[J].微型电脑应用,2020,36(9):120-122.
[4]汪东坪,李舜酩,魏民祥,等.汽车电子加速踏板可靠性控制的研究[J].汽车工程,2012,34(8):713-717.
[5]巴特,高印寒,曾小华,等.混合动力汽车工作模式切换控制方案[J]. 吉林大学学报(工学版),2016,46(1):21-27.
[6]孙振耀,孙仁云,王瀚,等.纯电动汽车加速踏板失效诊断和安全机制的研究[J].湖北汽车工业学院学报,2019,33(1):28-33.
