一种基于直觉模糊集的智能交通路径优选方法
2024-01-09储小宇
摘要 针对由多决策者、多属性、评价信息为直觉模糊数的群体决策——交通路径寻优问题,提出一种基于直觉模糊集几何距离的群体偏好一致度测量方法。首先确定个体决策者对各备选路径的直觉模糊评价矩阵,再结合决策者和属性的权重因子集,计算出不同决策者对备选路径的偏好一致性程度,再将个体偏好一致度集结成群体偏好一致度,然后按照群体综合一致度进行排序,即得出智能路径优选权等级。最后,通过一个算例验证了该方法的可行性和有效性。
关键词 群体决策;智能路径;直觉模糊距离;一致度
中图分类号 U412.32文献标识码 A文章编号 2096-8949(2023)23-0029-04
0 引言
交通智能路径技术在地图导航、自动驾驶、目标跟踪等方面应用广泛,也是旅游出行、交通救援任务等活动的效率性和经济性评估的重要指标。智能路径是指已初步考虑时间、距离、路况等因素,通过排除法完成初筛选的设定路径。每条备选路径各具优势且都包含不确定、不完备、不精确的信息,面临选择时个体决策者偏好不同,群体一致性选择某条路径可能性不高。智能路径选择是一个群决策问题,要找出决策者认同度较高的选择。一般而言,群决策问题包含着大量的模糊信息,实际决策过程总是在信息不完全的状态下进行[1]。
自1965年美国Zadeh提出模糊集理论以来,模糊集就被广泛地用于解决各种不确定性问题。1986年,保加利亚学者Atanassov进一步拓展了模糊集,提出了直觉模糊集的概念,被广泛地用来研究模糊决策问题,现有的不确定信息决策分析主要集中在对模糊信息群体决策方法的研究。相较于传统的群决策方法,直觉模糊集在处理模糊性和不确定性等情况时可更有效地解决个体决策者间选择的一致性和冲突性问题[2-6]。
目前,直觉模糊集在理论和很多应用领域都取得了较大进展,但该理论在智能路径择优方面应用较少,该文探讨在智能路径择优问题中引入直觉模糊集理论,提出一种基于直觉模糊距离的一致性测度方法,使智能择优问题中引入直觉模糊集理论,提出一种基于直觉模糊距离的一致性测度方法,使智能路径选择达到群体偏好最大化或者一致性最大化。
1 直觉模糊集理论
1.1 直觉模糊集基本概念
定义1[2-4]:设X为非空经典集合,X=(x1, x2, …, xn),定义A为:
A={
形如A的三元素组集合称为X上的一个直觉模糊集。其中,tA∶A→[0,1]和fA∶X→[0,1]均为X上的隶属函数,分别表示X上的元素x属于A的隶属度和非隶属度且0≤tA(x)+fA(x)≤1。
对于X上的每一个直觉模糊集A,称πA(x)=1?tA(x)?fA(x),为A中元素x的直觉指数,表示元素x属于A的犹豫度,又称非隶属度函数。
三元组[tA(x), fA(x), πA(x)]中任两个即可完全描述一个直觉模糊集,其特点是同时考虑隶属、非隶属及两者之外的不确定信息。例如,直觉模糊集A=<0.4, 0.4, 0.2>,可以用“投票模型”来解释为40%支持,40%反对,20%弃权。
直觉模糊集最大程度地描述了元素或对象与集合或者类的归属关系,是在模糊化基础上衍生出的一种更接近于某些客观情况的精确化描述,因此,在模糊信息表达方面更具優势。
1.2 直觉模糊距离
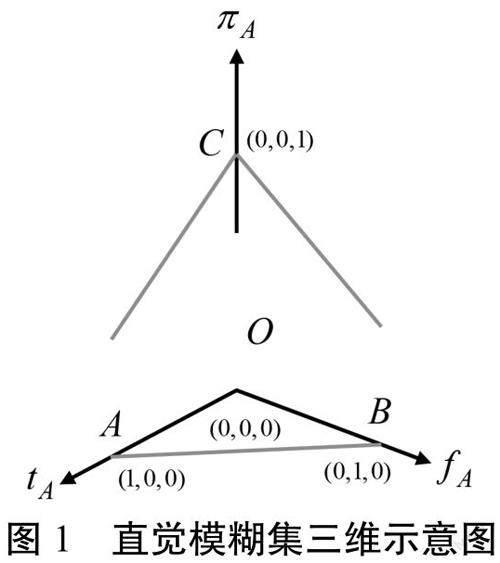
每一个直觉模糊集A可由三元组[tA(x), fA(x), πA(x)]表示,直觉模糊集中的任一元素可表示为三维坐标轴中的一个点[tA(x), fA(x), πA(x)],如图1所示。由于隶属度、非隶属度、犹豫度三者之间的关系,直觉模糊集中参数特征值只能在ΔABC范围内。
对于ΔABC内的每一个点都存在一个确定的直觉模糊子集与之一一对应。当犹豫度为0时,每个直觉模糊子集都退化成一个Zadeh模糊子集,映射在ΔABO中,模糊子集可看成是一种特殊的直觉模糊集。每一个直觉模糊集可映射到ΔABC中,描述两个对象相近或者相异程度可以转换为计算其直觉模糊集的几何距离[1-2]。
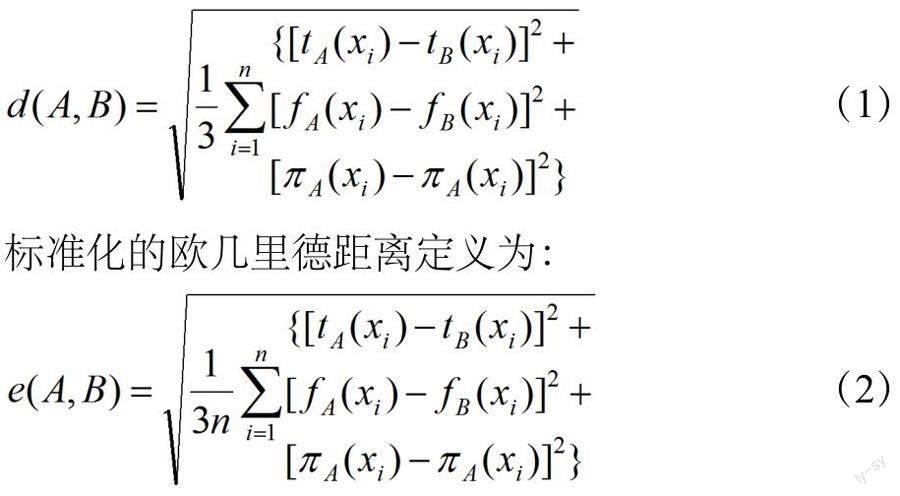
定义2[3-4]:设A={
显然,0≤e(A, B)≤1。
2 基于直觉模糊距离的智能交通路径择优方法
在路径择优过程中,会出现决策个体对方案的同意与反对程度不一致的情况,如何将个体优选模式集结成群体的一致性选择,是需要解决的一个重要问题。个体决策者对各智能路径方案的评价用直觉模糊集表示,再根据直觉模糊集理论进行分析计算,得到个体对个体、群体对个体的相似度或一致性测定,然后按照一致度进行排序[2]。
2.1 决策者直觉模糊评价矩阵
最终目标是选择决策者一致认同度最高的备选路径,所以在全体决策者两两一致度确定之后,还需要确定所有決策者对备选路径i的一致度。
理想化的情况下,所有决策者的重要性相同,则所有决策者对备选路径i的一致度就等同于决策者集合中任意一位对备选路径i的一致度,只需对所得的n条备选路径的两两一致度进行排序就可以得到优选顺序。实际情况下,每位决策者的评估结果所占权重是不一样的,因此还需确定决策者集合D中的每位决策者的相对权重分别为w={wd1, wd2,… ,wdm)。
最简单有效的方法是选取最重要的一位决策者,确定其权重为1,然后把第k位决策者与其进行比较,可得第k位决策者的权重rk,k=1, 2,… ,m。
可根据该方法再计算第k位决策者的相对权重系数wdk:
综合每位决策者的相对权重系数及对备选路径的相对一致度,可得到所有决策者对备选路径i的综合一致度为:
将ei(i=1, 2,… ,n)按照从小到大的顺序排列,值越小则表明距离越小,即决策者之间对该备选路径的偏好程度越接近。
2.3 智能路径择优实施方案
根据以上讨论,建立了智能路径的群体决策方案,实施流程图如图2所示。该实施方案主要包括个体决策者对单一智能路径的评估、个体决策者之间对单一智能路径的一致度测度、全部决策者对单一智能路径综合一致度三个方面的计算及排序。此外,还考虑了评价指标、决策者在单一智能路径评估中的权重因数,使得决策可靠性更高。
3 算例
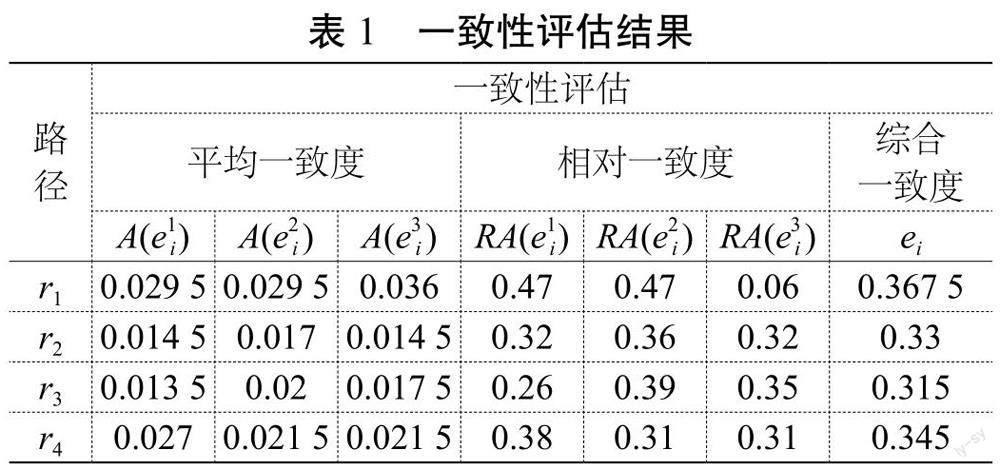
某企业制定员工旅行计划路线,假定决策者共有3位,构成集合D=(d1, d2, d3);备选路径有4条,记为R=(r1, r2, r3, r4);路径的属性包括时间分配(time)、景点分布(distribution)和生活便利(convenience),评价准则集为C=(c1, c2, c3)。现根据每位决策者对四条备选路径的直觉模糊评价,得到模糊评价矩阵分别如下:
评价矩阵中每项都是模糊数,无法取舍,而计算表明,决策者路径选择综合一致度参数是有差异的。根据e3
4 结束语
该文提出一种能从多个体、多属性的直觉模糊评估矩阵评价获取群体最一致选择的方法,基于直觉模糊距离和权重因子集来计算一致度,分析个体决策者对单一选择的偏好程度,进而获得群体对单一选择的偏好程度,计算出路径集的一致度排序。该方法计算复杂度不高,但是区分度好,为处理类似问题提供了一种有效途径。如何将该方法推广应用于其他类型问题,如分类、聚类等,以及该方法对不同结构的数据有效性验证,将是进一步研究的方向。
参考文献
[1]陈晓红. 复杂大群体决策方法及应用[M]. 北京:科学出版社, 2009.
[2]刘华文. 模糊模式识别的基础——相似度量[J]. 模式识别与人工智能, 2004(2): 141-145.
[3]郑良, 胡丹, 路泽亮. 直觉模糊集理论在移民后扶效果评价中的应用[J]. 人民长江, 2013(17): 105-108.
[4]邵良杉, 赵琳琳, 温廷新, 等. 基于区间直觉模糊数的双向投影决策模型[J]. 计算机工程与应用, 2017(1): 83-86+102.
[5]魏翠萍, 唐锡晋. 基于可能度的一种直觉模糊集相似度测量方法[J]. 系统科学与数学, 2010(9): 1275-1282.
[6]徐泽水. 区间直觉模糊集相似性测度及其在模式识别中的应用(英文)[J]. Journal of Southeast University, 2007(1): 139-143.
收稿日期:2023-09-07
作者简介:储小宇(1988—),男,硕士,工程师,从事交通规划、道路工程设计工作。