旋转锹式油茶垦复装置的仿真分析与试验
2024-01-09王保阳康丽春饶洪辉李庆松刘木华
王保阳,康丽春,饶洪辉,李庆松,陈 佳,刘木华
(江西农业大学 工学院,南昌 330045)
0 引言
截至2020年底,全国共有453.33万hm2油茶林,高产油茶林93.33多万hm2,且多种植在缓坡地带[1]。油茶是深耕性树种,多种植于丘陵或山坡上,其林内易形成各种杂灌[2],油茶垦复对熟化和改良土壤、增加肥力、清除杂草和消灭病虫害等都有重要作用[3]。研究表明,油茶垦复要求三年一深挖,深度20~30cm,呈覆瓦状;夏季一年一浅锄,深5~10cm[4]。现有油茶成林存在长时间不垦复、行内杂灌根系密集、易和油茶树争水争肥等问题,且土壤板结,不利于油茶树往深处扎根。
目前,国内对油茶林垦复机的研究已有一定的成果。2013年,徐谐庆等[5]设计了一种中间传动式油茶垦复机,选用直角旋耕刀,刀盘总成采用内装法,并在中间箱体下安装一个小犁体,以防止漏耕。2014年,徐谐庆等[6]设计仿真了标准园艺化油茶林圆盘犁垦复机,入土、翻土、覆土性能较好,不易缠草、容易克服林间碎石、寿命长、覆草性较好,垦复深度170~280mm,耕作幅宽750~1000mm。2017年,张峰超[7]申请了一项履带式油茶垦复机专利,采用履带行走装置,解决了现有油茶垦复机爬坡能力及越障能力不足等问题,但机身较大,适应开阔地带作业,不适合在生长茂盛的油茶林工作。2018年,曹有常等[8]根据旋耕机的原理设计了一款滚刀卧式油茶垦复机,履带式底盘满足爬坡越障,拖拉机牵引驱动,耕作幅宽1100~1200mm,耕深120~150mm。
目前油茶林垦复机械种类不多且耕深较浅,少数满足耕深要求的又因机器过大难以在成林后的油茶林中行走和作业。为此,设计了一种在缓坡地作业的旋转锹式油茶垦复装置,以期达到耕深180~220mm,实现“草根朝天”,满足垦复技术要求。
1 整机结构和工作原理
1.1 整机结构
旋转锹式油茶垦复装置主要由挖掘机底盘、液压驱动系统、传动减速系统、锹式曲柄摇杆机构、牵引装置、行走装置与升降调节装置等组成,如图1所示。

1.牵引连板 2.牵引挂钩 3.牵引架 4.挖掘机底盘 5.蓄电池 6.液压泵站 7.实心橡胶轮 8.轴承座 9.六方轮轴 10.锹 11.液压马达 12.刚性联轴器 13.T型减速器 14.机架 15.短连板组件 16.长连板组件 17.升降调节装置图1 整机结构Fig.1 Whole machine structure
其中,液压驱动系统由蓄电池、液压泵站、电磁换向阀、节流阀、压力表与液压马达组成;传动减速系统由液压马达、联轴器、T型锥齿轮减速器与六方传动轴组成;锹式曲柄摇杆机构由六方传动轴、长连板组件、短连板组件与锹组成;牵引装置由牵引架、牵引连板与牵引挂钩组成;行走装置由实心橡胶轮与六方轮轴连接而成;升降调节装置由导向轮、千斤顶与固定安装板组成。
1.2 工作原理
工作原理如下:油茶垦复装置启动后行驶至待垦复的缓坡油茶林内,调节升降轮高度使锹自然入土,操作电磁换向阀按钮驱动液压马达,动力经锥齿轮减速器换向减速后传递给曲柄摇杆机构,锹在曲柄摇杆机构驱动下往复运动;此时,操作油茶垦复装置前进,实现垦复作业;待垦复作业完成后,调节升降轮高度使锹升起,避免锹与地面碰撞造成损坏。
2 锹式垦复机构设计
锹式垦复机构是旋转锹式油茶垦复装置关键部分,模拟人工使用铁锹翻土的动作,设计的控制锹片翻土的曲柄摇杆机构如图2所示。垦复机构主要由六方传动轴、曲柄短连板组件、固定套筒、锹和摇杆长连板组件构成。由于锹片转速低,垡片大,与土壤作用时作用力大,导致传动轴所受扭矩较大。因此,传动轴选用中间圆两端六方型轴,且轴与减速器相连那一段采用花键联接。综合考虑,确定垦复机构部件中曲柄短连板长度为200mm,摇杆长连板长度为410mm,上下传动轴垂直高度差为350mm,锹上固定上下连杆的套筒在锹的轴向距离为340mm。

1.六方传动轴 2.曲柄短连板 3.固定套筒 4.锹 5.摇杆长连板 6.轴承座 7.机架图2 垦复机构部件Fig.2 Reclamation mechanism component
将图2的垦复机构近似简化为曲柄摇杆机构[9-11],如图3所示。其中,短连板轴孔中心距LAB=175mm,长连板轴孔中心距LCD=350mm,上下传动轴垂直高度差LAD=350mm,锹上固定连板上下套筒间轴向距离LBC=425mm,下端套筒距锹片端点距离LCF=280mm,机架距土壤水平面距离LDG=190mm。由于LAB+LCD≤LBC+LAD,最短杆AB与AD杆形成整转副,最长杆DC与AD杆形成摆动副,且相邻杆AD固定在机架上,满足了曲柄摇杆机构形成条件。

图3 曲柄摇杆机构Fig.3 Crank and rocker mechanism
图3中,θ为锹片入土倾角;β为垦复最大耕深时锹与土壤水平面夹角;L为垦复理论最大耕深。由图3可知:当AB短杆与BC连杆重合时为上极限点,此时曲柄摇杆机构如图中AB1C1D所示;当BC连杆在AB短杆延长线上时为下极限点,如图中AB2C2D所示。为克服机构死点位置问题,采用了4组锹式曲柄摇杆机构错位安装的方式,使其顺利越过死点位置,且sinβ=cos∠DAC,∠GAO=∠DAC,则
(1)
由式(1)得出sinβ=0.857,则
(2)
由式(2)得OF2=250mm,垦复最大耕深L=215mm。
3 旋转锹式油茶垦复装置仿真分析
3.1 基于EDEM的锹-土壤离散元模型建立
将Creo5.0软件中建立的旋转锹式油茶垦复装置三维模型导入Adams中,如图4所示。

图4 垦复装置三维简化模型Fig.4 3D simplified model of reclamation device
定义锹式垦复装置零部件材料属性,如表1所示。
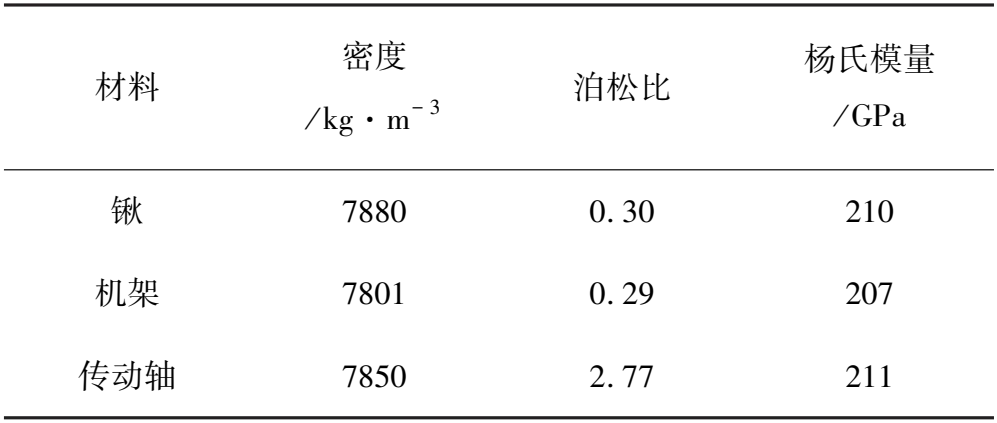
表1 材料属性表
依据文献[12-14]中离散元建模方法设置土壤颗粒本征参数,土壤颗粒之间、锹与土壤之间的接触参数,以及土壤颗粒接触模型参数,使用EDEM软件建立土壤颗粒模型。其中,颗粒模型选择Hertz-Mindlin with Bonding模型[15-16],土壤密度通过环刀法取土称量,剪切模量、泊松比据文献[17-18]获得。土壤颗粒材料参数如表2所示。

表2 土壤颗粒材料参数
设置土壤颗粒半径为10mm,通过酒精燃烧法测量计算出土壤含水率,并根据已知参数计算得到相应的土壤颗粒粘结半径为12.04mm,建立的土壤颗粒模型如图5所示。另外,使用摩擦因数仪MXD-02测量锹与土壤之间的静动摩擦因数,使用四联剪直剪仪测量土壤颗粒间的粘结应力,并通过土壤颗粒堆积角仿真试验标定确定土壤颗粒间的静动摩擦因数。
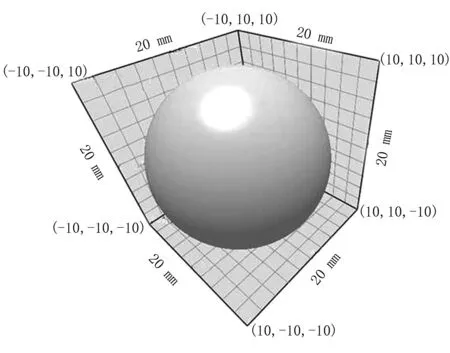
图5 仿真土壤颗粒模型Fig.5 Simulated soil particle model
土壤颗粒间的粘结刚度、应力和半径等参数参考文献[17-19],土壤颗粒接触模型参数如表3所示。

表3 仿真接触参数
在EDEM软件中建立土壤离散元模型,定义土壤在垦复装置前进方向上长度2500mm,宽度1800mm,土层厚度300mm,融合垦复装置三维模型,生成的锹-土壤耕作离散元模型如图6所示。

图6 锹-土壤离散元耕作模型Fig.6 The discrete element tillage model of spade and soil
3.2 锹片端点的运动仿真分析
为避免旋转锹式油茶垦复装置耕作时发生漏耕与重耕现象,需要确定锹片转速与及其相匹配的前进速度。分别定义锹片转速为40、50、60、70、80r/min,调整垦复装置前进速度进行运动学仿真分析,得到锹片端点轨迹[20],如图7所示。当相邻周期锹片耕作轨迹相切时,即为垦复装置耕作时不漏耕、不重耕的临界速度,如表4所示。

图7 锹片端点运动轨迹Fig.7 Movement track of the end point of spade
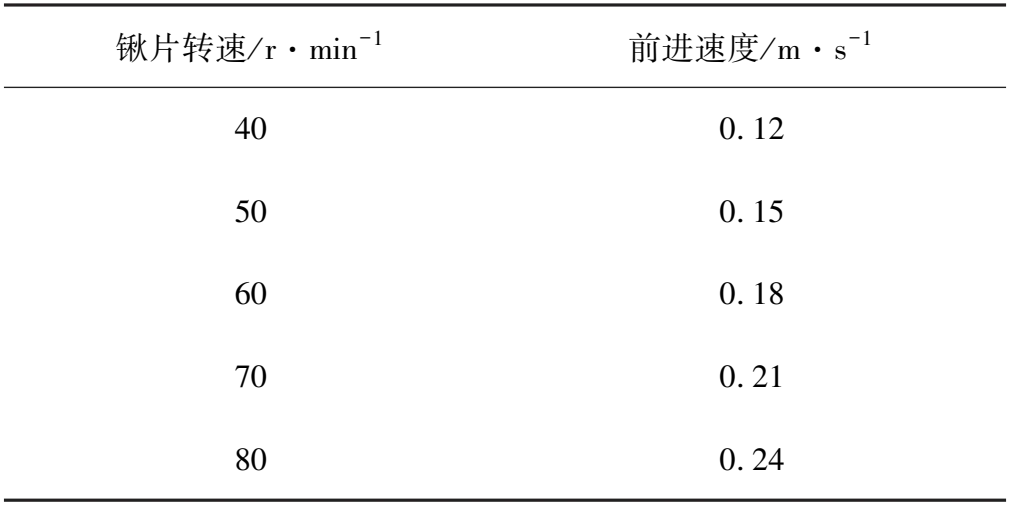
表4 锹片转速与其相匹配的前进速度Table 4 The rotation speeds of spade with the forward speeds
为分析锹片端点处于轨迹最低点时距离土壤水平面高度,对锹片运动进行仿真分析,得到锹片端点与土壤水平面垂直方向距离随时间变化曲线,如图8所示。垦复最大耕深为193.7mm,锹片入土倾角为70°。

图8 锹片端点离地高度随时间变化曲线Fig.8 Variation curve of the height from the end of the spade to the ground with time
由图8可知,仿真垦复最大耕深比理论计算最大耕深小。原因是长短连板组件与锹连接在空间上有一定的错位,将垦复装置构近似简化为曲柄摇杆机构后所得的曲柄摇杆机构下极限位置在实际仿真过程中难以达到,故实际仿真最大耕深略小于理论计算最大耕深。
3.3 锹与土壤相互作用的力学仿真
在EDEM中打开锹-土壤离散元模型,设置相应的步长与时间,通过Adams Co-simulation模块导入Adams中建立耦合仿真模型,通过EDEM后处理模块分析锹与土壤相互作用效果。
导出锹片受最大阻力时锹片的受力结果文件,并将其导入ANSYS软件中进行锹片应力应变仿真分析,锹与土壤相互作用的应力云图如图9所示。
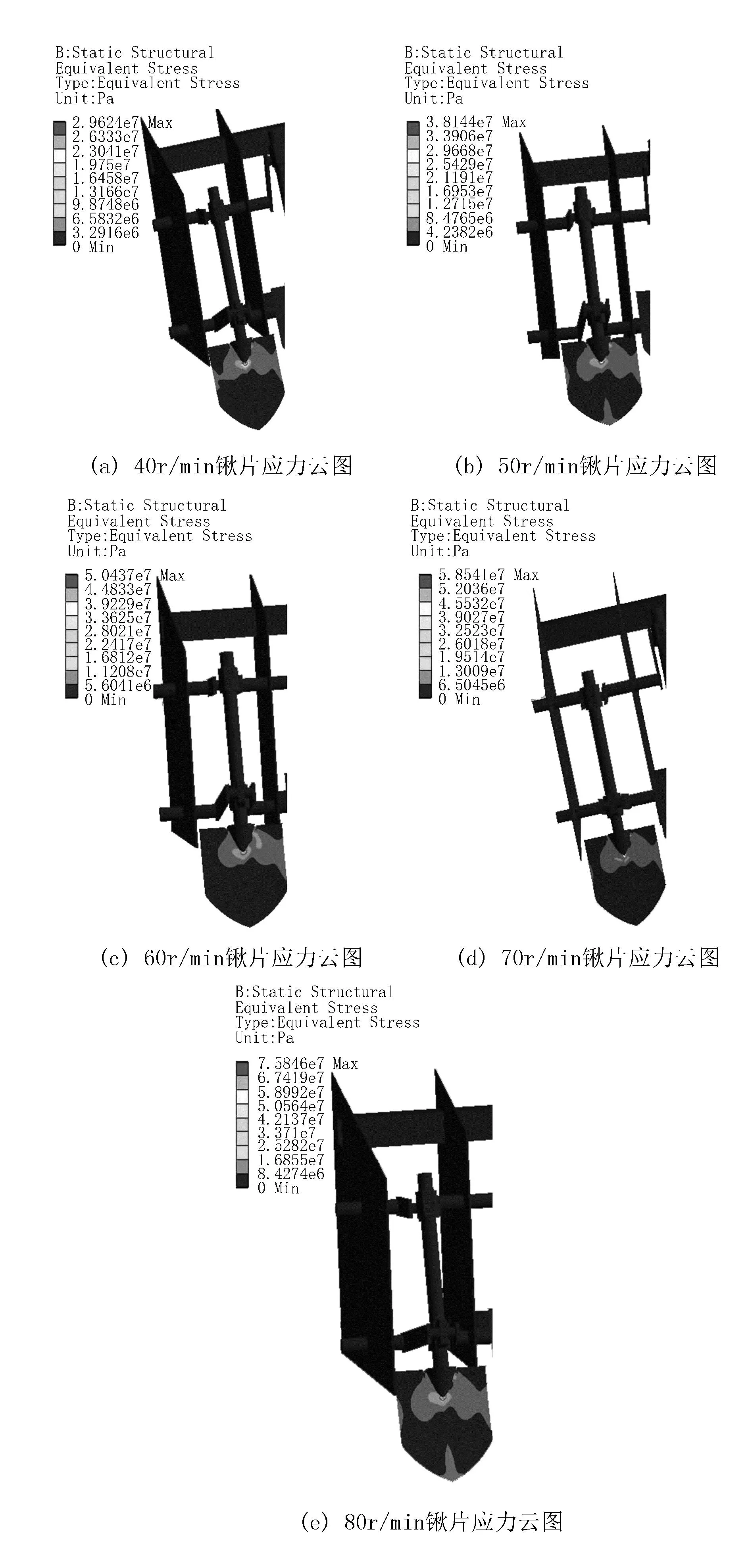
图9 不同匹配速度下锹片应力云图Fig.9 Stress nephogram of spade under different matching speeds
由图9可知:锹与土壤相互作用最大应力发生在锹柄与锹片连接处,连接处为U型缝线,在U字顶点处有应力最大值;当锹片转速分别为40、50、60、70、80r/min时,对应的锹片应力最大值分别为29.62、38.14、50.44、58.54、75.85MPa。对图9中数据进行分析,其拟合方程为y=1.1x-17,如图10所示。该拟合方程R2值为94.25%,说明锹片所受应力与锹片转速呈较好的线性关系。由图10可知:随着锹片转速增大,锹柄与锹片连接处的应力增大。
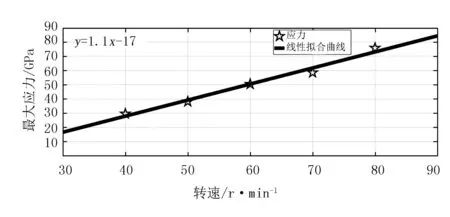
图10 不同匹配速度下锹片应力拟合方程Fig.10 Stress fitting equation of spade under different matching speeds
将锹与土壤相互作用时锹片所受最大阻力导入ANSYS软件中,对锹片进行应变仿真分析,得到锹与土壤相互作用的应变云图如图11所示。

图11 不同匹配速度下锹片应变云图Fig.11 Strain nephogram of spade under different matching speeds
由图11可知:锹与土壤相互作用最大应变发生在锹片端点处;当锹片转速分别为40、50、60、70、80r/min时,对应的锹片应变最大值分别为0.846、0.936、1.184、1.381、1.811mm。对图11中数据进行分析,其拟合方程为y=0.024x-0.19,如图12所示。该拟合方程R2值为96.87%,说明锹片端点应变与锹片转速呈较好的线性关系。由图12可知:随着锹片转速的增大,锹片端点应变增大。
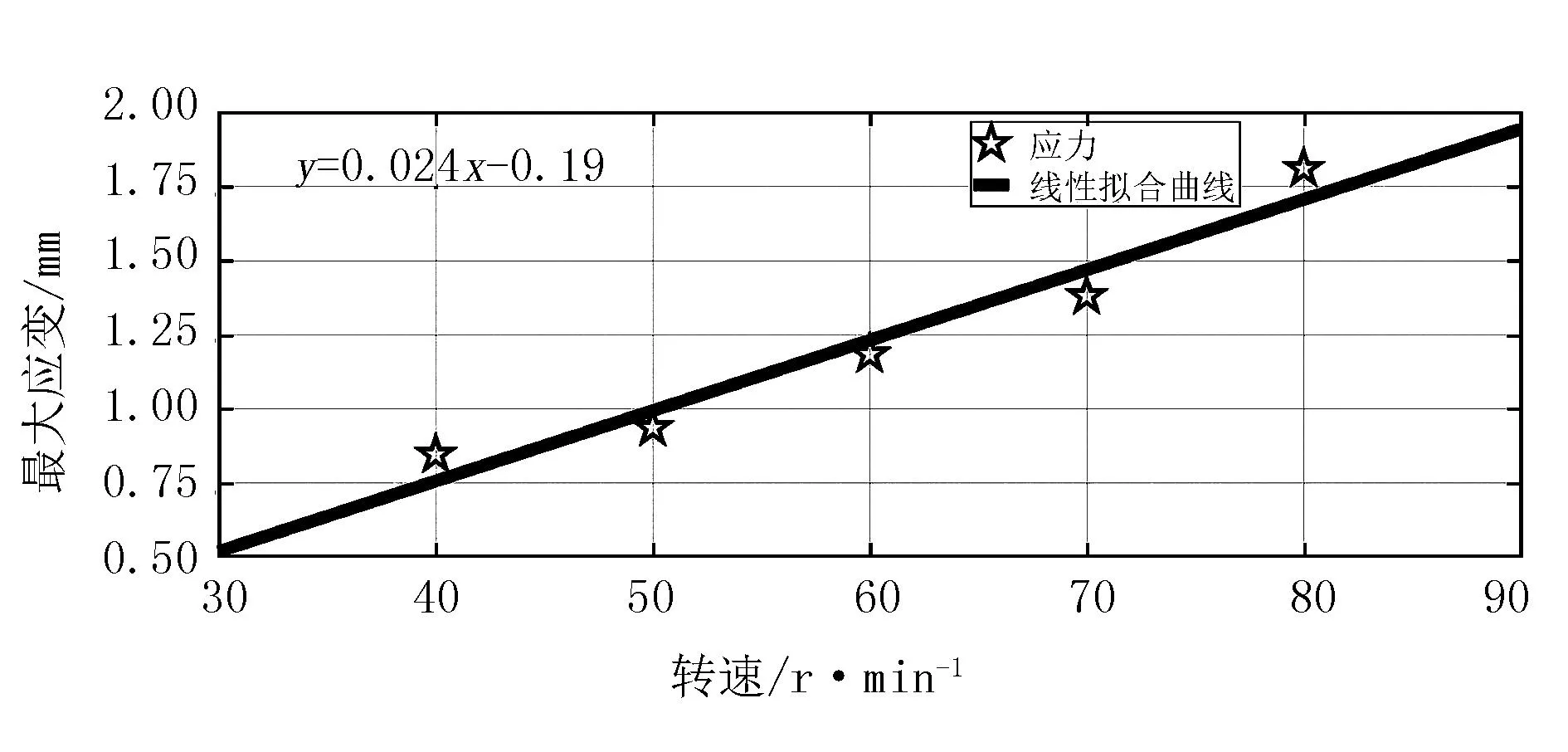
图12 不同匹配速度下锹片应变拟合方程Fig.12 Strain fitting equation of spade under different matching speeds
由仿真分析结果可知,锹片所受应力小于材料的屈服应力390MPa,应变也比较小,满足锹片强度要求。
4 垦复试验与结果分析
为了验证锹-土壤相互作用力学仿真分析结果,2022年1月7日在松软地进行了垦复装置耕作性能验证试验,并在此基础上于2月26日在江西省林业科学院油茶种质基地开展油茶林地垦复试验。试验时,油茶垦复装置由NT10挖掘机底盘牵引驱动前进,由电动液压泵驱动垦复机构进行垦复作业,测得其耕作幅宽为1100mm。
4.1 试验方案
为验证样机耕作性能,在土壤状况较好、植被覆盖率低的松软地开展垦复试验。选择锹片入土倾角为70°,分析不同锹片转速下旋转锹式油茶垦复装置耕作作业情况,因素水平如表5所示。

表5 试验因素水平表
4.2 试验及其结果分析
松软地验证试验选取试验田地长度10m,宽度5m。垦复耕作过程分为启动加速、匀速作业及减速停止3部分。由于垦复作业的前进速度比较慢,加速和减速区域比较短,故选取中间5m稳定耕作区测量耕深,并计算耕深稳定性系数。采用五点法,在5m稳定耕作区内每间隔1m在其对角线上选取一点测量,取5次测量耕深平均值,并计算其耕深稳定性系数。
分别在20、30、40r/min及其匹配前进速度下,进行旋转锹式油茶垦复装置耕作性能验证试验,如图13所示。以耕作耕深和耕深稳定性系数为垦复评价指标,对测量耕深数据计算处理,结果如表6所示。

图13 松软地垦复试验Fig.13 Soft soil reclamation experiment

表6 松软地试验结果Table 6 Experimental results of soft ground
参照松软地垦复装置试验方法在油茶林地开展旋转锹式油茶垦复装置垦复试验,结果如表7所示。由于油茶林地含水率低,土质较硬,耕深虽然未能达到理论设计要求,但基本能实现“草根朝天”的垦复效果,如图14所示。
由于垦复装置跳动幅度较大,导致实际垦复耕深小于仿真理论值。在同一片土壤、锹片入土倾角为70°的情况下,随着锹片转速及其匹配的垦复装置前进速度的增大,垦复试验耕作平均耕深更趋近于仿真理论值,其耕深稳定性也越来越好。对比表6和表7可知:当锹片转速及其相匹配的垦复装置前进速度相同时,松软地垦复耕深大于油茶林地,且耕深稳定性效果更好。
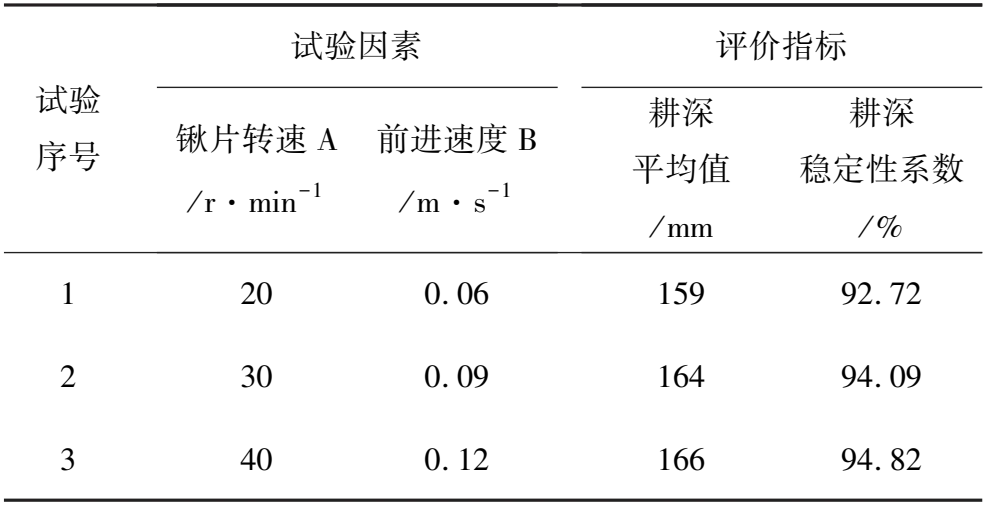
表7 油茶林地垦复试验结果
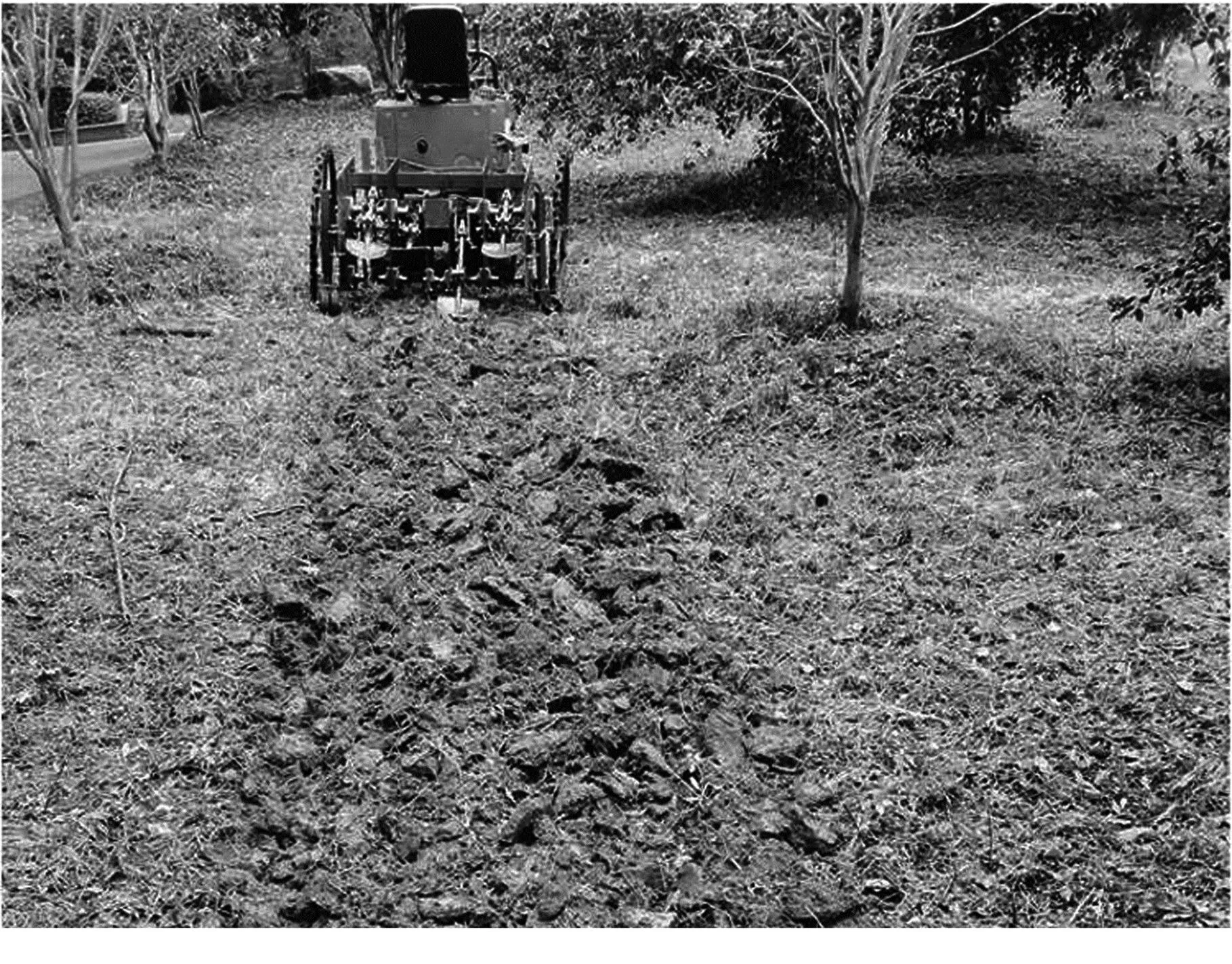
图14 油茶林地垦复试验Fig.14 Reclamation experiment of Camellia forest
5 结论
1)为满足油茶林垦复要求,设计了一种旋转锹式油茶垦复装置。
2)仿真分析了旋转锹式油茶垦复装置锹片端点运动轨迹,结果表明:当锹片转速为40、50、60、70、80r/min时,垦复装置不漏耕、不重耕的理论前进速度为0.12、0.15、0.18、0.21、0.24m/s。
3)锹与土壤相互作用的力学仿真分析表明:在40、50、60、70、80r/min及其相匹配的垦复装置前进速度下,锹片所受最大应力小于材料屈服应力,强度满足要求。
4)油茶林地垦复试验结果表明:锹片入土倾角确定为70°时,在锹片转速为20~40r/min及其相匹配的垦复装置前进速度下,垦复装置耕作作业正常,其耕深平均值为159~166mm,耕深稳定性系数为92.72%~94.82%。
