改进速度观测器的PMSM速度波动抑制*
2024-01-03牟日波范业鹏褚仁林侯华龙
牟日波,范业鹏,褚仁林,陈 曦,侯华龙
(武汉华中数控股份有限公司,武汉 430000)
0 引言
永磁同步电机一般选用编码器进行位置检测,伺服控制系统使用编码器的位置结果进行速度计算,而编码器受限于工艺,本身存在误差,电机低速运行时,多个周期的采样脉冲数可能相同,导致速度计算波动较大,同时外部和内部变化扰动等也可能导致电机速度波动,从而影响电机平稳运行和加工精度。
为了降低编码器等对电机速度计算的影响,许多学者提出了不同的方法抑制速度波动。苏健勇等[1]提出了基于电流和磁链的扩展状态自适应滑膜观测器,可有效消除速度波动和斗振现象。符玉襄等[2]提出一种基于卡尔曼滤波的速度信号估计,可减小低速时的测速误差和相位延时。陆骏等[3]提出了一种基于滑模的永磁同步电机直接转速观测器,相比于间接转速观测器,提高了低速和中高速稳态运行情况下转速稳态观测精确度。周扬忠等[4]提出了一种结合位置脉冲增量式插补的瞬时转速观测器,可进一步降低低速时的速度波动。
目前大部分观测器算法都是基于传统速度状态观测器,结合编码器角度实际计算的误差速度值预测估计电机实际速度,降低电机速度波动[5-7]。虽然传统全阶状态观测器可准确估计出转速,但其高阶算法复杂,计算量大,同时没有考虑相关的扰动引起的速度波动,速度估计不准[8-9]。本文设计了一种降阶的速度观测器,加入等效的干扰估计进行改进,降低了算法运算量,同时增加了速度估计的准确性。仿真和实验结果证明了本文所提方法的有效性。
1 状态观测器原理
在实际伺服控制系统中,由于硬件等条件的制约,不是所有的状态都能实时且准确的测量出来,而状态观测器就是为了实现状态反馈规律而设计的一种观测器。其基本思想就是以测量的参数作为输入,通过对状态进行计算监测估计,使得估计得到的状态值逼近真实值。闭环状态观测器的基本结构如图1所示。
由图1可知,在估计得到的观测值和真实状态值做差后加入反馈调节器L,在联合观测模型即构成了状态观测器,此时系统的状态方程为:
(1)
则
(2)
观测器特征方程为:
|sI-(A-LC)|=0
(3)
由现代控制理论可知,只需将上式的极点配置在s平面的左半平面,系统即可稳定。可通过调节反馈调节器L来配置极点,使系统稳定并达到状态估计的作用。
2 速度观测器原理
速度观测器就是基于状态观测器设计的一种观测电机速度状态的观测器。根据电机的数学模型可知:
(4)
式中:Te为电机额定转矩,TL为负载转矩,ω为电机机械转速,D为粘滞摩擦系数。则系统全阶状态方程为:
(5)
由此可得降阶状态方程为:
(6)
式中:
则通过矩阵计算可得:
(7)
则系统特征方程为:
(8)
假定配置的极点为x1和x2,则:
(9)
由式(9)可知,通过配置系统的极点就可得到相应的反馈矩阵L,而为保证系统稳定,系统极点需配置到s的左半平面,且观测误差需逼近0。
结合图1和式(6),可搭建速度观测器如图2所示。图中J为电机转动惯量,D为粘滞摩擦系数,Tlerr为扰动转矩误差,系统框图中各系数未标出。扰动转矩可由具体的扰动转矩观测器求出,但过程较为复杂,本文使用转矩电流指令和反馈的差值代替负载转矩实际和观测的差值。加入扰动分支项,进行速度观测更加准确。
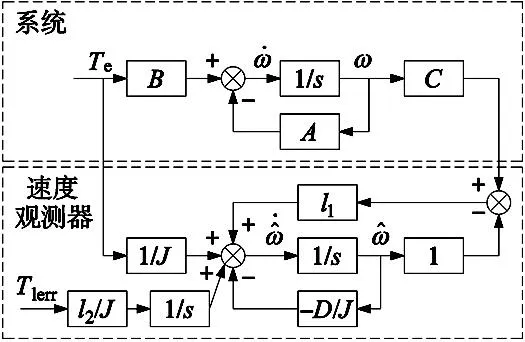
图2 速度观测器框图
3 速度观测器极点配置和实验分析
3.1 速度观测器极点配置与仿真模型设计
论文所有实验所用电机忽略电机粘性摩擦,电机规格参数如表1所示。结合电机实际参数和式(9),配置极点为x1=x2=-10,则l1=-19.84,l2=-0.16,实际平台中可根据系统模型合理的配置极点大小。结合图2,搭建观测器的simulink模型子模块如图3所示,可在MATLAB中进行仿真调试分析。

表1 永磁同步电机参数
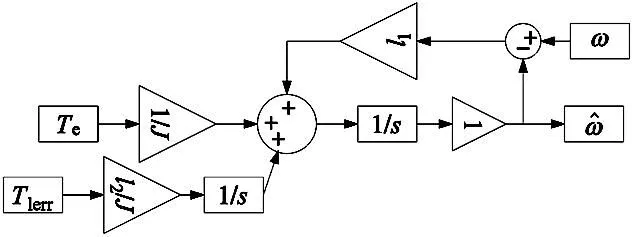
图3 速度观测器simulink模型
3.2 速度观测器仿真实验对比分析
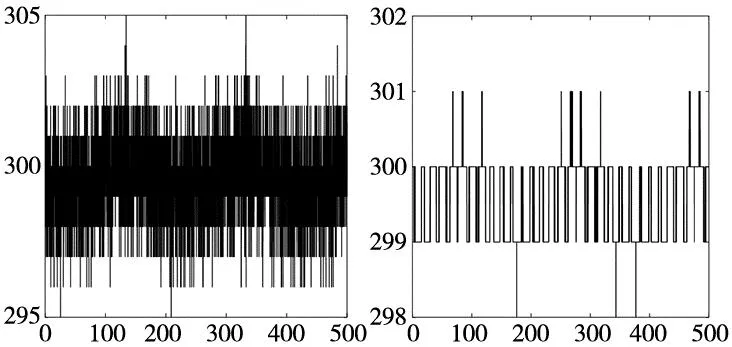
给定系统输入速度为300 rpm,加入观测器前后的仿真结果分别如图4所示。图中直线为电机给定速度输入,图4a和图4b中曲线分别为加入观测器前后的电机反馈速度。对比图4a和图4b可知,加入观测器前后电机反馈都在300 rpm附近波动,图4a和图4b速度波动分别在-5 rpm~5 rpm和-0.5 rpm~0.5 rpm之间,即加入观测器后,不仅能准确的观测到给定的速度输入,同时电机速度波动降低了90%。

(a) 未使用速度观测器 (b) 使用速度观测器图4 速度观测器仿真对比图
电机运行时,0.02 s突然加入负载扰动,加入观测器前后仿真如图5所示。图中直线为电机给定速度输入,图5a和图5b中曲线分别为加入观测器前后的电机反馈速度。对比图5a和图5b可知,0.02 s突然加入扰动,电机速度突然变化,短时间内图4a和图4b的速度都略有偏差,又迅速与给定值一致。但图5a和图5b速度波动分别在-10 rpm~5 rpm和-2 rpm~0.5 rpm之间,即在有干扰的情况下加入观测器后,不仅能准确的观测到给定的速度输入,同时电机速度波动降低了83%,观测器能跟随电机速度的变化,误差较小。

(a) 未使用速度观测器 (b) 使用速度观测器图5 加扰动速度观测器仿真对比图
3.3 实际平台实验对比分析
实际平台使用某公司驱动器产品,电机参数与前面保持一致。给定系统输入速度为300 rpm,加入观测器前后电机速度波动如图6所示。
(a) 未使用速度观测器 (b) 使用速度观测器图6 速度观测器仿真对比图
图6a和图6b中曲线分别为加入观测器前后的电机反馈速度。对比图6a和图6b可知,加入观测器前后电机反馈都在300 rpm附近波动,图6a和图6b速度波动分别在-5 rpm~5 rpm和-2 rpm~1 rpm之间,即加入观测器后,不仅能准确的观测到给定的速度输入,同时电机速度波动降低了70%,该方法在实际使用中效果明显。
电机在运行时手动加负载扰动,加入观测器前后实际电机运行速度波动如图7所示。图7a和图7b中曲线分别为加入观测器前后的电机反馈速度。对比图7a和图7b可知,突然加入扰动,电机速度变化,又迅速达到指令速度。但图7a和图7b速度波动分别在-20 rpm~10 rpm和-12 rpm~5 rpm之间,即在实际平台应用中,在有干扰的情况下加入观测器后,不仅能准确的观测到给定的速度输入,同时电机速度波动降低了43%,观测器能跟随电机速度的变化,误差较小。
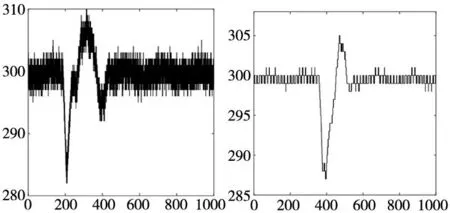
(a) 未使用速度观测器 (b) 使用速度观测器图7 加扰动速度观测器仿真对比图
4 结论
综上所述,永磁同步电机在相同指令速度条件下,与传统编码器角度计算的速度结果相比,结合等效的扰动计算的降阶速度观测器,可使反馈速度在指令速度上下波动的范围减小70%左右,同时将外部扰动对速度波动的影响范围减小43%,保证了对电机转速指令的快速跟踪,提高伺服控制系统的动态性能,保证电机的平稳运行。