附属柔膜对矩形柱扭转颤振影响的实验研究
2023-12-29杨双月王汉封赵崇宇
杨双月,王汉封, ,赵崇宇,
(1. 中南大学 土木工程学院,湖南 长沙,410075;2. 中南大学 高速铁路建造技术国家工程研究中心,湖南 长沙,410075;3. 曼彻斯特大学 地球环境科学学院,英国 曼彻斯特,M13 9PL)
矩形或近矩形断面结构在工程中大量存在,如梁、吊杆甚至基站天线等。这类结构气动特性受矩形的宽厚比(B/D,B为顺流向宽度,D为横流向厚度)、风攻角(θ)以及雷诺数(Re)的影响显著,容易发生涡振或扭转颤振等流致振动现象[1-2],威胁结构安全。
当θ=0 时,静止方柱(B/D=1)尾流中会形成Karman 涡街[3],对应的斯特劳哈尔数St=0.13。当基于D的ReD=1 000 时,随着B/D增大,前沿分离涡(leading-edge vortices, LEV)在再附区以外迅速衰减,在尾沿附近达到完全扩散状态[4]。
对于B/D=5矩形柱,当ReD=55 000时,在静止状态下,分离流对θ高度敏感[5]。当来流风速U∞=10 m/s、θ在0°~15°之间时,随着θ增大,底部分离泡重新附着,长度减小,顶部分离泡逐渐增大[6]。
对于B/D=2的矩形柱,振荡发生后,随着θ的变化,流场中可以观察到3种类型的涡形成:前沿撞击涡、尾沿涡脱落和交替边缘旋涡脱落[7]。
对于B/D=3 的矩形柱,当ReD=2 300 时,尾流的旋涡脱落模式随着振幅、振频增加而不断改变,最终全部成为2S模式[8]。
当枢轴处于平板中心位置时,随风速增加,平板会发生扭转颤振,并且平板最大角速度随风速增大而增大[9]。对于均匀流中的弹性平板,随着扭转刚度kθ减小,系统的动力学行为会出现分岔现象。首先,通过saddle-node 分岔的亚临界跃迁产生了小振幅的非对称极限环振荡,然后,通过Hopf 分岔的亚临界跃迁产生了大振幅的对称极限环振荡,kθ很小时,板不振荡[10]。板的振荡频率随B/D和转动惯量(Jθ)增大而减小,当Re>1 160 时,振幅随Jθ增加而减小[11]。
不仅来流湍流增大会减弱甚至抑制低速扭转颤振[12],流动控制装置也可以用来控制颤振[13-15]。施加风嘴作为一种实用的流动控制方式,可以增大旋涡脱落频率,抑制尾流旋涡脱落的能量[16],提高颤振临界风速[17]。除此之外,低流速下,横流向布置的柔性结构发生稳态形变[18-20],从而显著减小气动阻力,当风速增加至临界值时,柔性结构发生拍动[18,21-22],也会对颤振产生作用。利用局部柔性结构拍动可以实现对流动的控制,例如:增强射流扩散[23]和管道换热[24]、减小气动阻力[25]、抑制圆柱尾流涡的形成[26]等。在模型表面对称配置柔膜可以完全抑制尾迹的周期性,从而抑制力的波动[27]。
几乎所有的非圆形截面都容易发生颤振[28]。能否利用局部柔膜的拍动,削弱LEV,抑制矩形柱的扭转颤振是一个有意义的问题。基于小型基站天线的外形简化和缩尺,本文作者通过风洞实验,探究固定于迎风侧两边缘的附属柔膜对B/D=3的矩形柱扭转颤振的影响。
1 实验
实验在流风洞内进行,风洞实验段截面长×宽为450 mm×450 mm,实验段长为1.2 m。实验模型由光敏树脂3D打印制成,矩形截面宽厚比B/D=3,其中B=60 mm,D=20 mm,具体实验模型如图1所示。模型长446 mm,距离风洞上下壁面的间隙仅2 mm,可近似为二维矩形柱。扭转轴位于模型几何中心,贯穿风洞实验段,两端由轴承固定。模型回复力由弹簧通过连接在转轴底部的圆盘提供(图1(a)),避免了扭转颤振过程中回复力的非线性。

图1 实验装置与参数定义示意图Fig. 1 Schematic diagram of experimental setup and parameter defintion
用激光位移传感器测量弹簧端部位移,为模型中间展向截面内的PIV的测量提供相位参考。激光位移传感器为KEYENCE公司的CMOS激光位移传感器IL-300,从传感器探头起的测量范围为160~450 mm,重复精度为30 μm,显示分辨率为10 μm,线性度精度为±0.25%,基准距离为300 mm,其测量误差远小于1%。PIV 系统的CCD 相机分辨率为2 560 像素×2 160 像素,空间分辨率为90.9 μm/像素,查问区间为32 像素×32 像素,x、y方向重叠率为50%,后续手动取点时最多有2~3个像素的误差,即每个方向最多只有0.09%的误差。每种工况PIV 测量2 000 帧瞬时流场用于后续相平均分析。在模型下游如图1(b)所示位置上布置1根热线探针(HW),检测脉动风速以确定尾流中的涡脱频率。实验中,热线的采样频率为2 000 Hz。实验中来流风速U∞=0~25 m/s,基于D和U∞的Re=0~33 000。
本实验所研究的柔性附属结构为一对0.06 mm的聚乙烯薄膜,竖直固定于模型迎风面边缘,如图1(b)和1(c)所示。柔膜宽度d=10 mm。增加柔性薄膜后,模型阻尼比、固有频率等参数无明显变化,即柔膜对结构参数的影响可忽略不计。本实验中,风速超过临界值后,柔膜会发生周期性拍动。采用北京江宜UX50 高速相机以2 000 帧/s 的帧率记录柔膜拍动形态。风洞实验实物图如图1(d)所示,模型及柔膜的主要参数如表1所示。

表1 矩形柱模型及柔膜主要参数Table 1 Main parameters of rectangular cylinder model and flexible film
2 扭转颤振控制方程
矩形柱扭转颤振的控制方程为:
其中:θ(t)为瞬时角位移;为瞬时角速度;为瞬时角加速度;M(t)为瞬时扭矩;ωn为系统无阻尼固有圆频率;CM(t)为瞬时扭矩系数;ρ为来流密度;Ur为折减风速。和是由θ(t)进行一阶求导和二阶求导得到的。ζθ是通过自由振动实验得到的,ωn可以由式(2)求出,进而由式(3)得到转动惯量Jθ。
3 实验结果
3.1 振幅特性
无控制时,本实验矩形柱扭转颤振发生时Ur=7.2。图2 所示为Ur=7.2 时模型从起振到平稳过程的振幅时程图。从图2可见:模型颤振始于小幅振动,振幅随时间增加而增大,最终达到稳定的极限颤振阶段。图3所示为有、无控制时模型最大振幅θmax随Ur的变化情况。无控制时,θmax的变化可分为3个阶段:即静止阶段、振幅增长阶段和平稳阶段,这与文献[29]的结果一致。模型起振后,θmax随着Ur增大而增大,当Ur增大至17.0 时,θmax逐渐达到最大值2.11 并保持稳定。增加了柔性薄膜后,模型起振风速提高至约12.8,相对于无控制工况提高约76.8%。θmax随Ur的增大速率也有所减小。在本实验最大折减风速Ur=22.0 时,θmax仅为1.25,相对于无控制工况减小约40.8%。值得注意的是,控制工况中附属柔性薄膜的拍动发生于Ur=8.7。介于有、无控制时的模型起振风速之间。也就是说,控制工况中,即使柔膜未发生大幅拍动,其也能抑制模型的颤振;而当柔膜发生拍动后,其进一步提高了结构的颤振临界风速,并在起振后明显减小了结构振幅。

图2 Ur=7.2时模型扭转颤振振幅时程图Fig. 2 Torsional flutter time history diagram of model when Ur=7.2
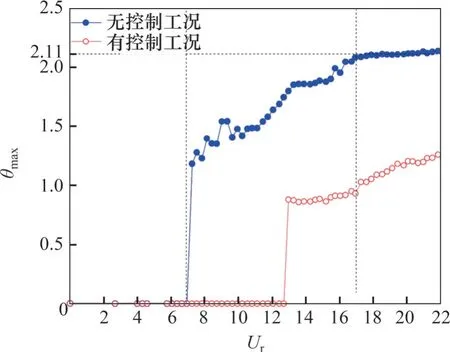
图3 颤振最大振幅θmax随Ur的变化Fig. 3 Variation of θmax with Ur
3.2 尾流涡脱频率
图4所示为热线探针(图1(b))所确定的尾流中的主导频率随风速的变化。对于无控制工况,模型发生颤振前(Ur<7.2),尾流主导涡脱频率随Ur线性增加,对应的St约为0.147,与文献[12]中的结果非常接近。本文所研究的B/D=3的矩形柱体恰好处于由前沿分离涡状态(LEV)向前沿分离涡碰撞状态(impinging leading-edge vortex)转变的临界值附近[7]。当模型颤振发生后(Ur>7.2),矩形柱自然涡脱频率完全消失,尾流中主导频率变为系统的固有频率fd,并不再随Ur增大而变化。这表明颤振发生后,尾流中旋涡脱落被模型的扭转振动“锁定”。图5 所示为无控制、有控制工况下,模型尾流频谱图。颤振发生后,尾流中正负旋涡可能都会扫过热线所在位置,此时脉动速度频谱在2fd的能量峰值会远高于fd对应的峰值。NORBERG[30]在研究小迎角B/D=2~3 的矩形柱绕流时也观察到了类似现象。

图4 尾流中主导涡脱频率随折减风速的变化Fig. 4 Change of dominant vortex shedding frequency in cylinder wake with Ur

图5 不同Ur下尾流频谱的变化Fig. 5 Change of wake spectrum at different Ur
对于安装附属柔膜的控制工况,颤振前(Ur<12.8),尾流主导频率也随Ur线性增加,对应的St为0.064,远小于无控制对应值。这是因为当Ur<8.7 时,柔膜呈顺风向静态弯曲状态,此时流动分离点由模型迎风面边缘变为柔膜顶端,两侧分离流间距比无控制工况的大(类似于模型宽度增大),造成了尾流中涡脱频率减小。当8.7<Ur<12.8 时,柔膜大幅拍动,但模型仍未发生颤振,此时尾流频谱峰值明显变宽,无突出的主导频率。这一现象是因为柔膜的拍动会形成高频扰动,削弱模型固有旋涡脱落过程,如图5(b)所示。
3.3 流场形态
图6所示为颤振前无、有控制时尾流典型瞬时涡量图与时均速度分布。图6还给出了控制工况对应的柔膜状态,以方便讨论。对于无控制工况,Ur=6.0 时(图6(a)和6(d)),模型下游出现规则的Karman 涡街,且涡街宽度相对较窄,其对应的平均回流区尺寸也较小。对于相同Ur条件下的控制工况(图6(b)和6(e)),由于模型前沿柔膜仍处于静态弯曲状态,两侧脱落旋涡间距增大,涡街宽度明显加大,对应了控制工况下颤振前尾流涡脱主导频率减小(如图4 所示),相应的时均回流区也明显增大。当Ur=12.0 时(图6(c)和6(f)),柔膜已拍动,模型仍未发生颤振。在柔膜拍动的作用,规则的旋涡脱落被明显削弱,且尾流涡街和平均回流区尺寸均明显变小。结合图5中的能谱变化,可以确定柔膜拍动后明显削弱了尾流中规则的大尺度旋涡,而产生了更多的随机小尺度结构,并最终提高了模型颤振稳定性,这里的尺度是相对模型的厚度D而言的。

图6 尾流瞬时涡量w*z和时均速度Fig. 6 Instantaneous spanwise vorticity w*z and mean streamwise velocity
为进一步说明颤振发生后柔膜对结构尾流的影响,图7给出了有、无控制时的相平均结果,对应折减风速Ur=18.0,此时2 种工况均发生了稳定的大幅颤振(如图3 所示)。各典型相位下模型扭转角也标注于图中。对于无控制工况,当模型达到最大振幅位置时,即θ=±2.09时,模型下游出现强烈涡街,如图7(b)和7(d)所示。此时,模型逆流向运动的边缘下游形成了完整涡团,类似于箱梁或机翼颤振中的前沿分离涡LEV[31-32]。由于LEV 的作用,在模型振动至θ=0时,尾流中仍能清晰地观察到交替脱落的涡街结构,如图7(a)和7(c)所示。而对于控制工况,尽管在最大振幅θ=±1.05时,也出现了LEV 涡旋,但相对于无控制工况时其强度明显减弱,且旋涡沿流向被显著拉伸,如图7(f)和7(h)所示。尤其值得注意的是,当θ=0时,模型尾流中无明显交替脱落涡街,取而代之的是两列沿流向拉长的涡团,如图7(e)和7(g)所示。这将削弱流固耦合[33]过程中,模型从流体获得的回复力,并减小颤振振幅。
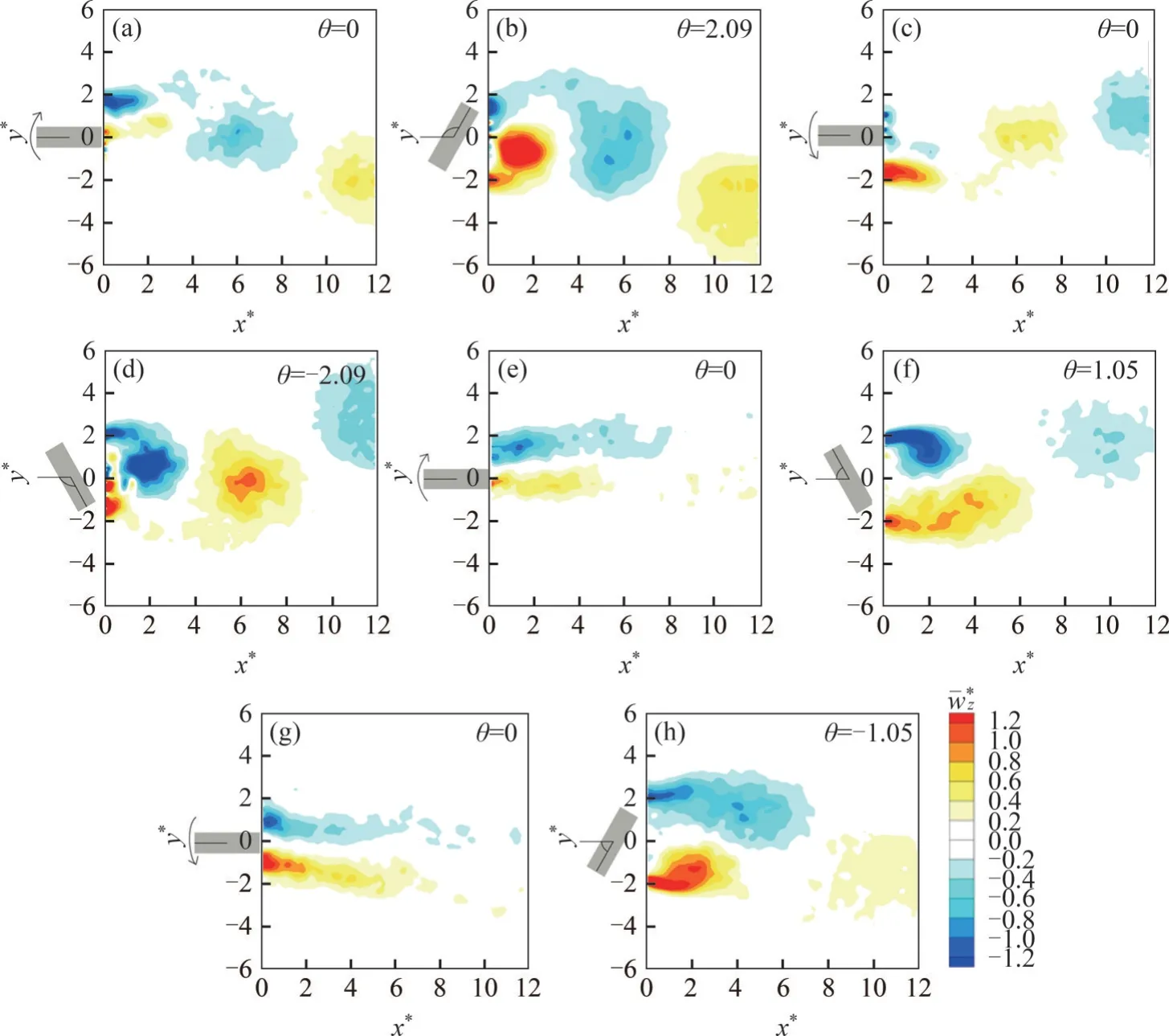
图7 Ur=18.0时尾流相平均涡量Fig. 7 Phase-averaged spanwise vorticityat Ur=18.0
3.4 扭矩与能量
利用实验测得的瞬时角位移θ(t),通过扭转颤振控制方程式(1)可计算得到瞬时扭矩系数CM(t)。图8所示为不同风速下CM(t)与θ(t)的相位关系,其中顺时针曲线代表流体对结构做功,即正功(图8中红色部分);而逆时针曲线为结构对流体做功,即负功(图8中蓝色部分)[29]。
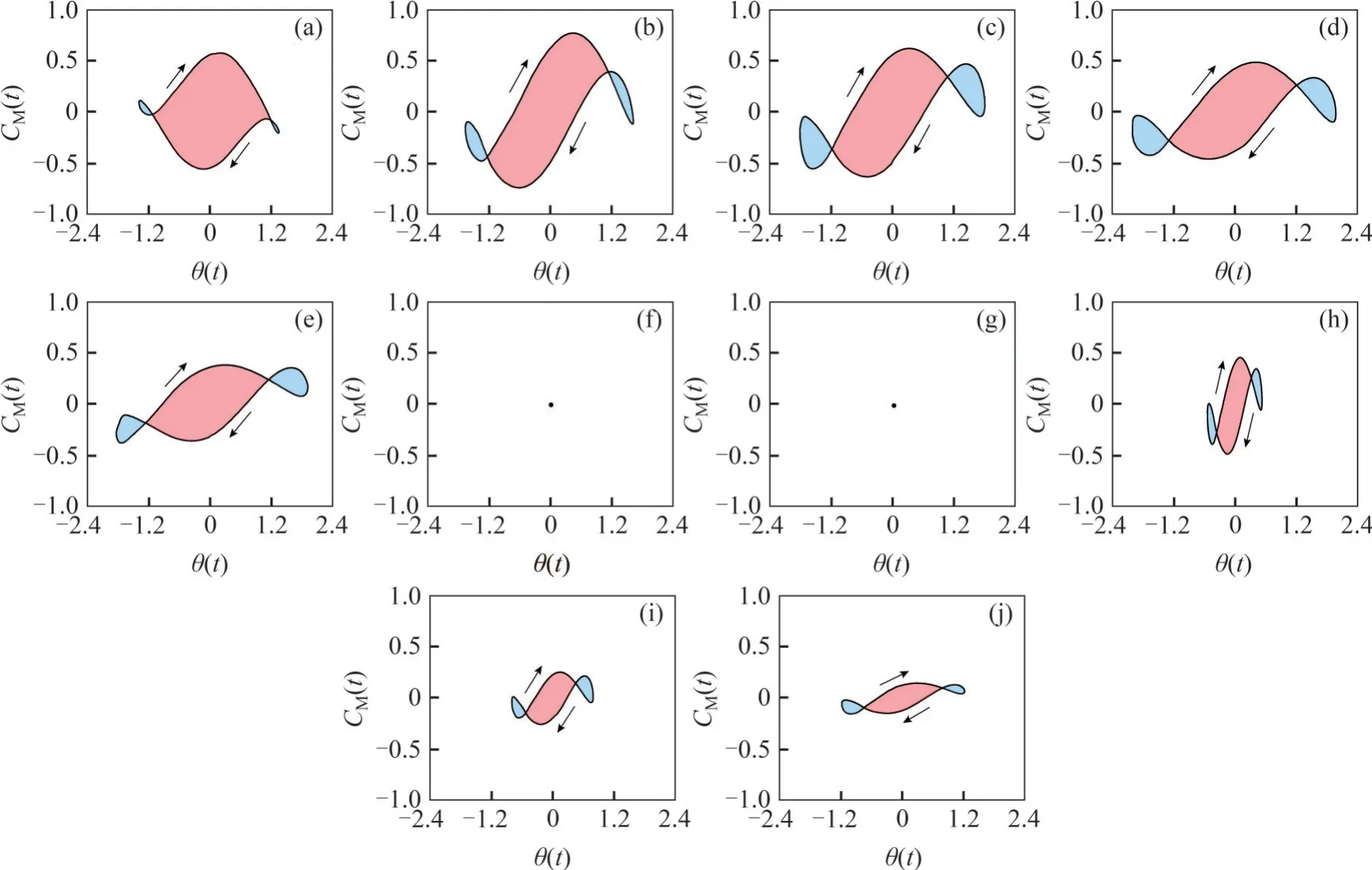
图8 不同Ur下CM(t)与θ(t)的相位关系Fig. 8 Phase relation between CM(t) and θ(t) at different Ur
对于无控制工况,当Ur为9.0、12.0和15.0时,正功远大于负功,表明结构能不断从流体中吸收能量。此阶段,随Ur增大,振幅θ不断增大。而当Ur为18.0 和20.0 时,正负功之差基本不再变化,最大振幅θmax也达到稳定。对于控制工况,Ur为9.0和12.0时模型未发生振动。而当Ur>15.0时,模型逐渐开始振动,但振幅和每周期内模型所吸收的能量均远小于无控制工况对应值。这表明柔膜的拍动通过减弱尾流中周期性旋涡,显著抑制了模型颤振。
4 结论
1) 柔性薄膜能够显著削弱矩形柱的扭转颤振,颤振临界风速提高约76.8%,Ur=20.0 时的最大振幅减小约40.8%。
2) 对于无控制工况,颤振前,尾流主频率随Ur线性增大,对应St=0.147;颤振后,涡流主频率被锁定于模型固有频率,不再随Ur变化。对于附加柔膜的控制工况,当柔膜处于静态弯曲状态时,尾流主频随Ur线性增大,对应St=0.064;当柔膜拍动后,尾流无显著主频;颤振发生后,尾流主频被锁定于固有频率,与无控制工况类似。
3) 控制工况中拍动的柔膜能显著削弱颤振时尾流中的LEV。此外,模型过平衡位置时尾流中的交替涡街在控制工况中也几乎被完全抑制。这反映在控制工况中流体对模型的净功显著减小,并最终带来了颤振振幅的减小。
