星载光子计数激光雷达数据森林高度及林下地形反演研究进展
2023-12-29李毅朱建军付海强高士娟吴可夫
李毅,朱建军,付海强,高士娟,吴可夫
(中南大学 地球科学与信息物理学院,湖南 长沙,410083)
森林生态系统是地球上最大的陆地碳库之一,拥有世界3/4 以上的陆地生物[1],通过“碳汇”和“固碳”的方式调节全球范围内二氧化碳的含量[2],控制着全球碳循环。当今遥感技术的发展为森林碳储量的反演奠定了基础。传统林业调查难以用于系统地统计全球森林碳储量,而森林生态系统碳储量与森林高度等垂直结构参数密切相关,是林业调查的重要参数[3-4]。森林高度参数对森林生态系统的结构分层、“碳达峰”与“碳中和”工作的实现具有十分重要的意义,是林学、植被生态学和遥感科学研究的热点问题[5]。另外,数字地形模型(digital terrain model, DTM)是支撑国家重大基础设施建设、灾害监测的战略信息资源,关乎国计民生和国家安全。然而,在森林覆盖区,传统遥感手段无法穿透森林覆盖层测绘森林下的地形(林下地形)。获取准确的林下地形对于国家地理信息、国防安全、基础设施建设和地球科学领域基础研究极为重要,如何获取准确的林下地形是近年来测绘遥感、地球物理、地理信息等领域的重要研究目标。
传统的林业参数调查采用人工测量模式,可以获取高精度的森林高度及林下地形参数,但人工测量无法获取大范围林业参数,且人工成本较大,耗费时间较长。光学遥感为大范围测图带来了便利,且数据获取便利,可以观测森林面积变化,提取森林生化参数。但光学遥感无法穿透森林,导致无法测量植被结构参数和林下地形。激光雷达技术作为一种先进的遥感技术,改变了传统的空间数据采集模式,被广泛应用于森林资源清查、林业管理以及森林生态系统冠层理化过程反演。星载激光雷达因其具有广阔的覆盖范围,被应用于大范围的森林资源调查、林业管理及森林冠层理化过程揭示。作为第一代星载激光雷达,ICESat/GLAS(Ice, Cloud, and Land Elevation Satellite/Geoscience Laser Altimeter System)在2003—2009 年服役期间,为研究者提供了全球范围内大量的森林高度及林下地形数据。ICESat/GLAS数据被广泛用于与MODIS、Landsat 和Sentinel 光学影像融合,估算了大范围的森林高度、林下地形、地上生物量及叶面积指数[6-9]。ICESat/GLAS 服役任务结束后,新一代星载激光雷达系统(ice, cloud,and land elevation satellite-2, ICESat-2)于2018 年9月成功发射,是目前在轨运行的星载激光雷达系统之一。作为ICESat-1的后续任务,ICESat-2搭载了微脉冲、多光束光子计数激光高度计(advanced terrain laser altimeter system,ATLAS),代替GLAS的全波形激光雷达系统[10-11]。ATLAS 激光测高系统具有光子级探测灵敏度,是一种激光测距的新技术,因其具有较高的重复频率,有助于提高沿轨道方向的空间分辨率[12]。光子计数激光雷达在一定程度上协调了激光能量和频率[13],基于光子探测技术的星载激光雷达具有高重频、多波束、微脉冲、轻量化等诸多显著优势,成为未来激光雷达遥感的发展趋势[14]。相比于ICESat-1,ICESat-2具有更强的植被冠层细节表达能力,并且对地形坡度的变化具有较小的敏感性。虽然ICESat-2的主要目标是监测冰冻圈的变化,但它收集了大量的地球陆地表面数据,为森林高度及林下地形参数的反演打下了坚实的数据基础[15]。因此,星载激光雷达ICESat-2 光子点云数据为森林高度及林下地形反演提供了强有力的支撑。
由于ICESat-2 搭载的ATLAS 激光测高系统的脉冲接收棱镜对太阳光非常敏感,因此,在白天获取的光子点云数据中包含大量背景噪声光子[16]。这些背景噪声光子会直接影响光子信噪属性的判别,从而影响森林高度及林下地形参数的反演精度。另外,地面及冠层顶部附近的噪声光子会影响地面信号光子与冠层信号光子的分类精度,从而间接影响森林高度及林下地形参数的反演精度。针对这些问题,学者们开展了大量反演森林高度及林下地形的研究。ICESat-2/ATLAS 森林高度及林下地形反演一般流程如图1所示,包括光子点云滤波、林下地形反演及森林高度反演。本文介绍ICESat-2/ATLAS 激光雷达系统的各项参数以及其产品的精度,分析现有光子点云滤波方法、森林高度与林下地形反演方法的适用性及其局限性,总结已有研究进展,并对未来研究进行展望。
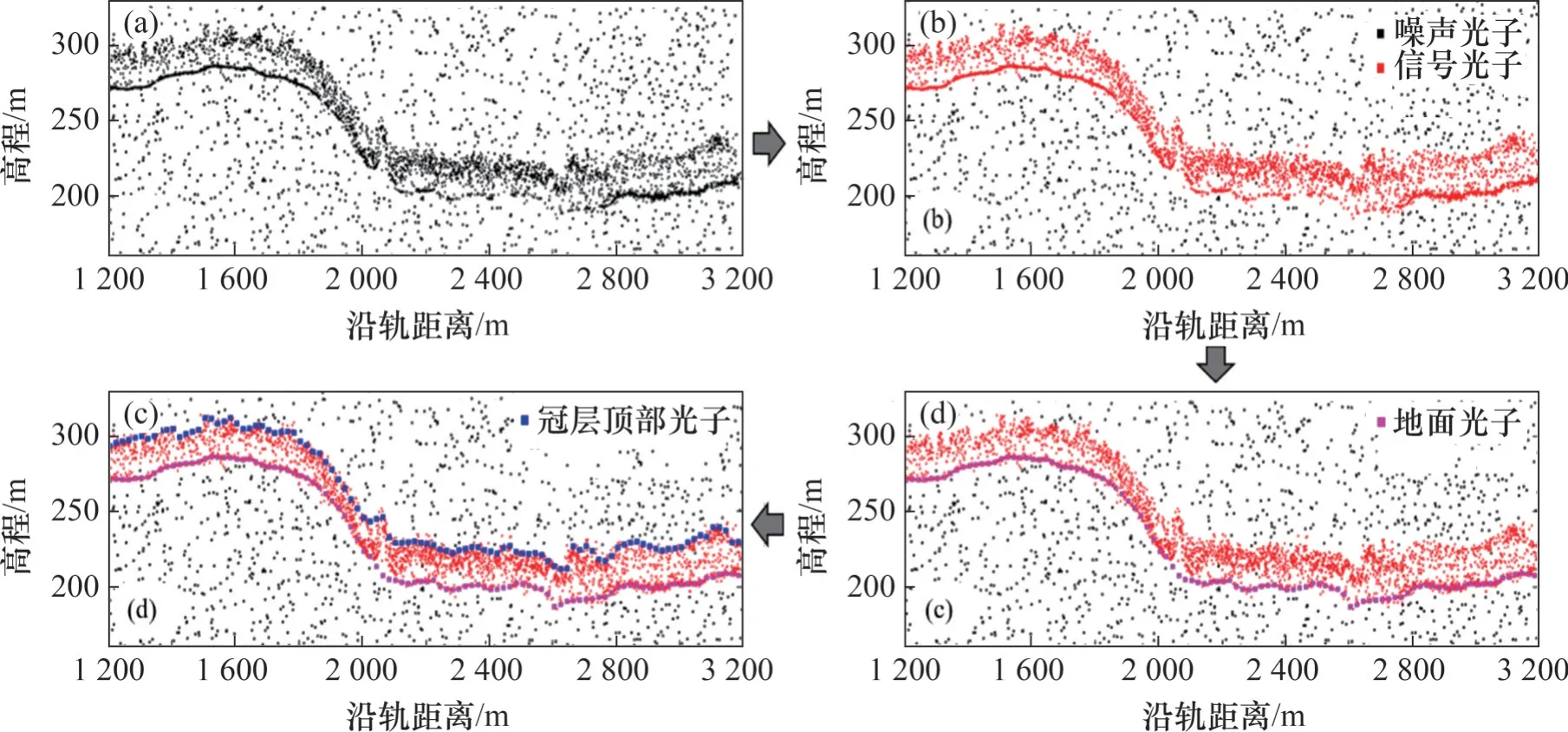
图1 ICESat-2/ATLAS森林高度及林下地形反演一般流程Fig. 1 General processes for retrieving forest height and sub-canopy topography from ICESat-2/ATLAS
1 ATLAS 及ATL08 地形及森林高度参数介绍
新一代星载激光雷达ICESat-2/ATLAS 为森林高度及林下地形参数反演提供了可靠的数据源。表1所示为ICESat-2/ATLAS的主要参数。ICESat-2卫星的轨道高度约为500 km,轨道倾角约为92°,重复观测周期为92 d,具备全球覆盖的能力[10]。其搭载的ATLAS激光测高系统将波长为532 nm的激光波束分成3组光束,光束之间相隔约3.3 km,每对光束将根据它们的相对能量分为强光束和弱光束,组内强弱光束间隔约90 m,并以10 kHz 的重复脉冲频率对地发射激光脉冲[10,12](图2(a))。高重复频率的激光脉冲导致光斑在沿轨向上具有较高的重叠度,相邻光斑间隔约0.7 m,产生的光斑足迹直径约为17 m[17](图2(b))。在每个光斑内,检测到的光子飞行时间用于确定卫星到地表的距离,再结合ICESat-2 卫星姿态和指向信息,即可将其定位到地球表面上的唯一位置,从而以光子点云的形式表达地物信息(图2(c))。随着3 年的对地观测任务服役期满,激光脉冲的能量将逐步减少,最终光斑足迹直径可能会增加到大约20 m[17]。
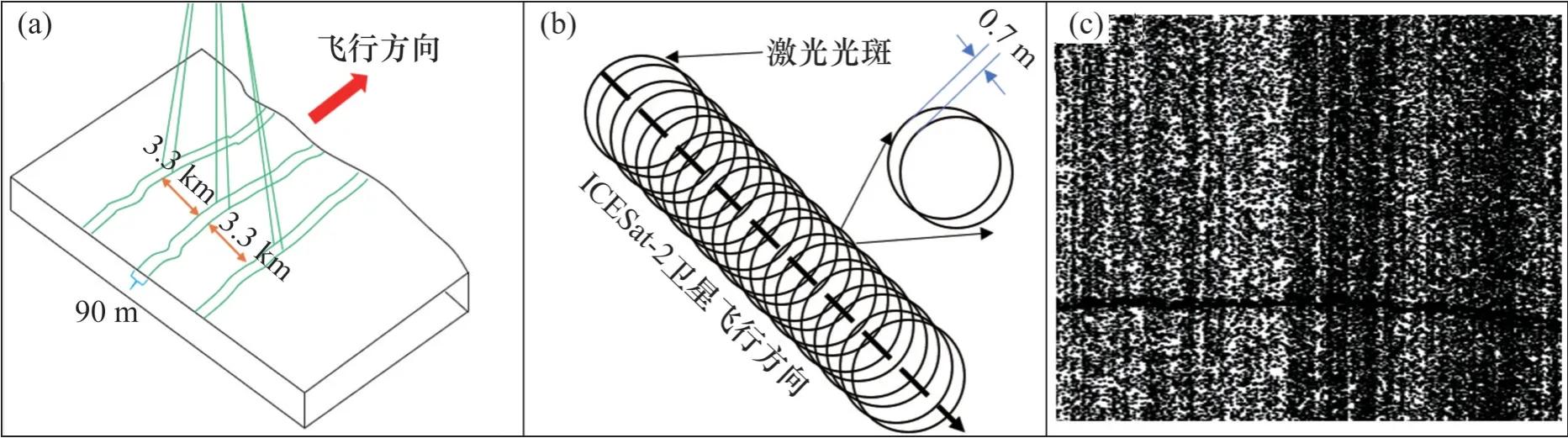
图2 ICESat-2/ATLAS激光雷达系统示意图及光子点云示例[10, 12, 17]Fig. 2 Schematic diagrams of ICESat-2/ATLAS system and example of photon point cloud[10, 12, 17]
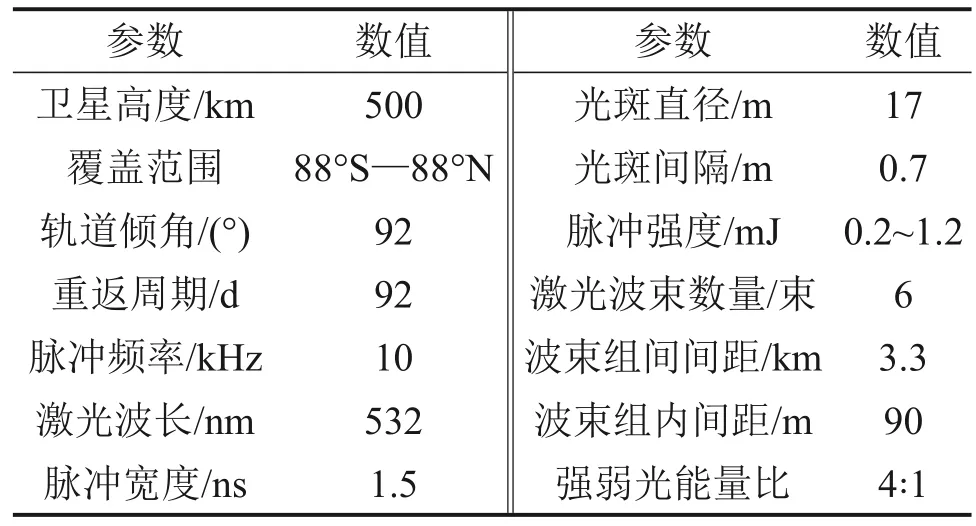
表1 ICESat-2/ATLAS激光雷达主要参数[10]Table 1 Configuration parameters of ICESat-2/ATLAS[10]
图3 所示为ICESat-2/ATLAS 产品,分共为4级:level0、level1、level2 和level3。level0 是原始遥测数据,主要包含激光测距信息;level1是对原始遥测数据经过误差纠正、重新格式化及单位转换后的数据集;level2是由上述数据集生成的光子点云数据,主要包括光子点飞行时间、卫星速度、光子点经纬度及高程等参数;level3 是从level2 数据集中通过相关算法生成的一系列地表参数,主要包括陆地冰参数、海冰参数、海面高度参数、大气参数及陆地和植被参数。ICESat-2/ATL08 属于level3 级参数,主要为用户提供陆地和植被产品,最初提供了沿地面轨道以100 m为固定步长的地形高度和森林高度参数[18]。ATL08 地形及森林高度经光子点云滤波、光子点云分类及参数插值等方法获取,其中,冠层高度定义为冠层顶部光子高程相对于插值地面点高程的高度差[10]。ATL08算法提出了一种简单、易实现的差分、回归和高斯自适应最近邻(differential regressive and Gaussian adaptive nearest neighbor, DRAGANN)的光子点云滤波方法,目的是分离信号光子和噪声光子[19]。在滤波后的光子点云上,利用迭代中值滤波及样条函数插值对地面光子及冠层光子进行分类。一旦光子被分类为地面光子或冠层光子,便可用于计算森林高度参数[19]。为了保证数据产品的连续性,提高产品的易用性,NASA官方最初以100 m的固定步长为用户提供林下地形和森林高度[20]。ATL08数据产品采用HDF5文件格式,可通过国家冰雪数据中心NSIDC (National Snow & Ice Data Center)下载获取,免费下载网址为https://nsidc.qrg/data/icesat-2/data-sets。

图3 ICESat-2数据产品类型示意图[20, 23]Fig. 3 Schematics of ICESat-2 products[20, 23]
根据开放的ATL08 地形及森林高度参数,Neuenschwander 和Magruder 利用芬兰的机载激光雷达实验站点验证了ATL08 地形及森林高度参数的精度,其中地形和冠层高度的均方根误差(RMSE)分别为0.85 m 和3.69 m[20]。另外,利用机载激光雷达匹配得出了ICESat-2 光斑足迹在水平方向的地理定位误差在5 m以内,光斑足迹定位在6.5 m 内。MAGRUDER 等[21]利用立方角反射器测量了激光光斑的水平偏移量以及实际光斑足迹,发现ICESat-2 激光光斑地理定位误差为(3.5±2.1) m,有效光斑直径为(10.9±1.2) m。尽管ICESat-2 激光光斑地理定位误差和有效光斑直径均符合任务要求,但激光光斑地理定位误差和光斑足迹误差对林下地形及森林高度的反演不可忽略。当前解决激光光斑定位误差主要方法是参考DEM/DTM 对其水平偏移进行纠正,但其纠正精度严重依赖于使用的DEM/DTM的精度。目前公开的全球DEM/DTM 在地形复杂地区难以满足要求,高精度机载激光雷达生成的DTM 虽然可以纠正激光光斑定位误差,但其使用范围有限。NEUENSCHWANDER等[18]利用覆盖芬兰北方森林的机载激光雷达数据评估了ATL08地形及冠层的精度,在北方森林地区,ATL08 地形高度的均方根误差(RMSE)为0.73 m,当仅使用夏季夜间的强光束数据时,冠层高度的相对均方根误差为13.75%。另外,白天和夜间获取的森林高度及地形的精度表现出较大差异,夜间获取的产品(低噪声)精度比白天(高噪声)的高。王密等[22]验证了ATL08 地形高度在不同坡度区域的精度,研究了基于ATL08 地形高度参数与相关属性参数的全球高程控制点提取方法,为全球ICESat-2 ATL08 地形高程的筛选提供了有效方法。但选取的试验区较平坦,难以反映地形波动对地面高程点高度的影响,也没有详细讨论影响ATL08 地形高度精度的因素。ZHU 等[23]利用位于西班牙山地丘陵地区的机载激光雷达数据验证了ATL08 地形精度,并分析了坡度、林种、噪声强度和季节对ATL08 地形精度的影响,得出:地形坡度和噪声强度是主要影响ATL08 地形精度的误差因素,随着坡度增加,ATL08 地形精度显著下降;当坡度为20°时,ATL08 林下地形的RMSE 增加至3.35 m;当坡度大于30°时,ATL08 林下地形RMSE 增加至5.33 m,可视为不可靠的地形。LIU等[24]将取自美国大部分森林类型的机载激光雷达数据用于验证ATL08 地形及冠层精度,分析了坡度、植被覆盖度、信噪比、地物覆盖类型、森林高度等因素对ATL08 地形及冠层精度的影响,并利用随机森林对这些误差因素的重要性定量化,发现地形坡度、植被覆盖度、信噪比和森林高度对ATL08 地形和冠层的影响较大,重要性指标均高于50%。
以上研究验证了ATL08 地形和森林高度参数在不同地区的精度。通过研究各种误差因素对ATL08 地形和森林高度参数的影响发现ATL08 地形和森林高度产品主要受地形、信噪比、植被覆盖度的影响。目前,ATL08 陆地地表参数已经更新至第五版,第五版提供了沿轨道方向20 m 采样间隔的地形及树高参数,其精度有待进一步验证。由于ATLAS 仪器对太阳光过于敏感,导致地物信号中掺杂了大量的背景噪声光子,而DRAGANN滤波算法对噪声光子的识别不足,大量残留的噪声光子会增加反演地形和冠层高度的难度。另外,这些噪声光子的存在同样会加剧地理环境因素对ATL08 地形及森林高度参数的影响。鉴于此,一些研究者对光子点云滤波进行了研究,力图彻底地分离信号光子和噪声光子。
2 森林区光子点云滤波研究进展
光子点云滤波是森林高度及林下地形反演的重要步骤,滤波是否成功直接决定反演的精度高低。光子点云滤波主要是基于信号光子与噪声光子之间的密度差异。现有针对森林区域的光子点云滤波方法主要可分为基于空间密度聚类和基于局部参数统计。
2.1 基于空间密度聚类的森林区光子点云滤波
ZHANG等[25]提出了基于水平椭圆搜索的密度聚类方法(density-based spatial clustering of applications with noise, DBSCAN),充分考虑了光子的空间分布规律,在平坦地区有较好的滤波效果,但难以适应地形复杂的地区,且滤波结果严重依赖于输入参数。POPESCU 等[26]提出了自适应的聚类算法,该方法可以在多数环境下去除噪声光子,但该方法难以去除信号光子附近的噪声光子,且需要耗费大量的时间用于最优参数选择。考虑到基于密度聚类的滤波方法易受输入参数的影响,HUANG等[27]提出了基于粒子群算法的参数寻优策略,以提高密度聚类方法的可靠性,在一定程度上提高了光子点云滤波的稳定性,但难以适用于复杂地形。然而,MA等[28]考虑到地物覆盖类型对聚类参数的影响,采用地物分类的外部数据辅助,对不同类型的地物采用不同的输入参数,取得了较好的滤波效果,但该方法的性能依赖于地物分类数据的精度,并且在地形复杂的地区效果不佳。为了改善密度聚类方法在地形起伏较大地区的性能,王玥等[29]提出了一种自适应的改进DBSCAN 滤波方法,旨在通过邻居点搜索椭圆自适应地形变化,在一定程度上提高了坡度对滤波性能的影响。WANG 等[30]发现背景噪声密度不均对滤波结果影响较大,在滤波前进行了背景噪声密度均匀化处理,然后利用贝叶斯决策理论对光子点云进行滤波。该方法在复杂地形下具有较好的性能,但滤波结果易受输入参数的影响且需要预先计算背景噪声率。基于聚类的滤波方法易受输入参数的影响,滤波效率不高,能否用于大范围森林参数反演还有待进一步研究。
2.2 基于局部参数统计的森林区光子点云滤波
已有研究表明局部参数统计的滤波方法更适用于复杂的森林区域,是森林区使用最多的滤波方法[31-32]。然而,要获得稳定准确的滤波结果,基于局部参数统计的滤波方法必须解决2 个主要问题:1) 如何设计一种适应不同地形的光子邻居点搜索方法;2) 如何设计合理的局部统计参数用于表达光子点空间密度关系,以准确区分信号光子和噪声光子。采用可靠的光子邻居点搜索方法时应找到相似密度分布的邻居光子点,这直接决定了后续的局部参数统计过程中是否包含足够的信噪属性相似的光子。
基于圆的搜索方法最早被用于获取光子的邻居[33],圆搜索方法具有易实现、效率高的优点,但这种搜索方法往往会错误地选择很多信噪属性不同的光子(图4(a))。一些研究采用水平椭圆的搜索方法获取光子点的邻居点[34-36],与圆的搜索方法相比,水平椭圆的搜索方法可以更准确地表达光子点的空间权重关系,获取较多的相同信噪属性的邻居光子(图4(a))。然而,水平椭圆的搜索方法不能适应地形变化,当地形变化较大时,该方法的邻居光子搜索能力受限。为了解决这个问题,ZHU 等[32]提出了自适应的椭圆搜索方法,可以适应不同的地形条件准确地找到相同信噪属性的邻居光子点(图4(b))。YANG 等[37]采用自适应椭圆搜索方法发展了基于椭距的滤波方法,发现自适应的椭圆搜索方式更适合地形复杂的地区。
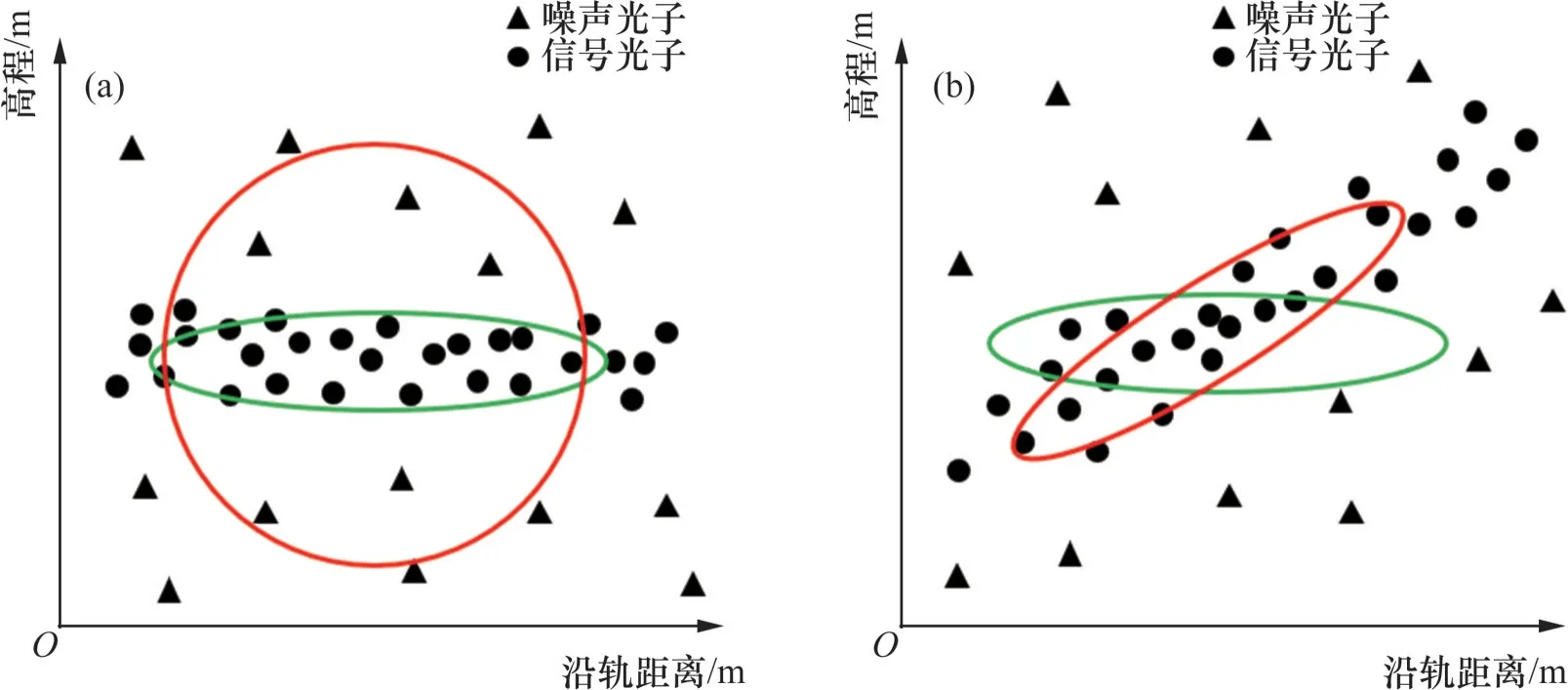
图4 光子点邻域搜索方法示意图[37]Fig. 4 Schematic diagrams of the neighbor search method of a photon[37]
确定邻居光子搜索方法后,计算局部参数统计指标来描述光子点的空间分布,例如特征向量[31]、局部离群因子[34]、局部距离[33,37-38]、加权局部距离[39]和邻居数量[19,32,35]。然后,通过高斯函数拟合信号光子和噪声光子的局部统计参数的概率密度,并计算阈值区分信号光子与噪声光子。虽然这些滤波方法在相应的实验区均取得了可靠的滤波效果,但局部参数统计的滤波方法在阈值计算、光子点信噪属性刻画及光子点云滤波前提假设方面仍有较大的改进空间。
首先,采用局部参数统计的滤波方法选择合适的阈值非常困难,因为局部参数的概率密度分布会随着诸多因素如地表覆盖、地形和噪声的变化而变化,这些因素均会导致局部参数不遵循标准的高斯分布。其次,依据光子点的空间关系,可以将其分为信号光子、远离信号光子的噪声光子和邻近信号光子的噪声光子3类。已有方法无法有效地去除邻近信号光子的噪声光子,因为邻近信号光子的噪声光子呈现出与信号光子相似的概率密度分布。单一局部参数不能准确刻画这3类光子点的空间密度差异,在以后的研究中有必要引入多种局部参数共同表达光子点空间密度关系。冠层光子与地面光子的密度差异可能是导致滤波失败的重要原因。已有研究仅认为信号光子与噪声光子密度存在较大差异,并将其作为滤波准则。然而,在森林区尤其在针叶林和落叶林区,冠层信号光子与地面光子密度也可能存在差异。冠层信号光子与地面光子密度差异会导致光子点云局部参数的概率密度不再呈双高斯分布,从而导致滤波失败。因此,在以后的研究中,有必要考虑冠层光子与地面光子的密度差异,改进光子点云滤波的前提假设。
3 ICESat-2林下地形反演研究进展
林下地形反演建立在光子点云滤波和分类的基础上,光子点云分类是指对滤波后的信号光子进行类别标记,将滤波后的信号光子分为冠层光子和地面光子。分类后的地面光子可直接用于林下地下反演,分类后的冠层光子可用于森林高度的反演。
在反演森林高度参数之前,必须获取准确的林下地形,林下地形的精度直接影响森林高度参数的精度。在林下地形反演方面,已有方法通常将滤波后的光子点云在沿轨方向划分为不同的窗口,获取窗口内地面光子点,最后通过曲线拟合或者样条插值的方法形成连续的林下地形。林下地形的精度主要取决于地面点的准确性,错误的地面点将生成不可靠的林下地形。
对地面点提取而言,一些研究将每个窗口中选取高程最低的信号光子为地面点[34,40],这种地面点选取准则忽略了来自滤波后残留在地面附近的噪声光子的影响,较多的噪声光子残留必将导致林下地下反演失败。另外,一些研究者将每个窗口中一定高程分位数范围内的信号光子作为地面点[18,26,35],这种地面点的选取准则在一定程度上可以减小残留噪声光子的影响。但在密集植被或者复杂地形处难以获取准确的地面点,在密集植被区可能将冠层光子误分类为地面点,在复杂地形下可能将残留噪声光子误选为地面点。上述地面点获取准则均严重依赖于光子点云滤波结果,在实施过程中会受到残留噪声光子、地形坡度及密集植被覆盖的影响。ZHANG等[41]提出了一种附加地形指数的布料模拟方法,以地形指数替代布料硬度参数模拟布料自然下落的过程,获取了较准确的地面点。另外,由于地形指数的引进,该方法能较好地用于地形分析等研究[41]。ZHU 等[32]通过生成光子点高程频数直方图再结合光子点云滤波参数,将最低峰值处的最大光子密度作为粗略地面点的位置,为了避免上述2种误差因素,采用经验模态分解(EMD)去除粗略地面点中近地表的噪声光子和冠层光子,并通过渐进不规则三角网络(TIN)方法精确地加密地面光子。相比于以上方法,该方法具有较强的去除残留噪声光子的能力,并且通过经验模态分解去除部分误分类的冠层光子,这在一定程度上提高了地面点的精度,但EMD分解方法对于识别连续错误地面点的能力有待进一步提高。
在生成连续的地形方面,考虑到地形一般具有连续性,已有研究对获取的地面点进行多项式拟合或样条函数插值的方式生成连续的地面[18-19,33-35,40]。
现有滤波方法不能完全地将信号光子和噪声光子分离,滤波结果中仍残留一些邻近信号光子的噪声光子。这些残留在地面光子附近的噪声光子会影响地面点分类的精度,制约着高精度的林下地形反演。另外,对于密集植被覆盖的区域或地形复杂的区域,由于地面光子稀少或地形起伏较大,无法准确地获取地面点。
4 ICESat-2森林高度反演研究进展
4.1 基于ICESat-2数据的森林高度反演研究
在森林高度反演方面,已有方法通常将滤波后的光子点云沿轨方向划分为不同的窗口,获取窗口内的冠层顶部光子点,再通过样条插值的方法形成连续的冠层顶部。最后,利用冠层顶部高程减去地形高程即可获取森林高度。
对获取冠层顶部光子而言,相关研究将每个窗口中信号光子的最大高程作为冠层顶部[34,40]。这种方法有待商榷,因为残留在冠层顶部附近的噪声光子会被识别为冠层顶部光子,极大地影响获取的冠层顶部光子的精度。另外,一些学者将一定高程百分位数范围内的光子点作为冠层顶部光子[18,26,32,35],虽然能够消除部分残留噪声光子的影响,但未考虑沿轨方向上冠层光子反射率及噪声密度差异等因素。由于沿轨方向上植被冠层的反射率及光子点的信噪比并不一致,导致滤波后残留的噪声光子数量也不尽相同。因此,在沿轨方向上对所有统计窗口内的信号光子使用相同的百分位数范围选取冠层顶部光子点有待商榷。为此,GAO 等[42]提出了一种树高反演方法,在获取冠层光子前先去除地面光子的影响;其次,考虑到沿轨向上残留噪声光子不同,利用光子点高程加权去除残留在冠层附近的噪声光子,最终获取冠层顶部光子并计算树高。实验结果表明,该方法可以较彻底地去除冠层附近残留的噪声光子,树高反演精度较ATL08 有所提升。但是,该方法输入参数具有较多经验值,没有对冠层反射率及不同噪声密度进行物理建模。在以后的研究中,有必要对冠层反射率及噪声密度差异进行物理建模,采用自适应的高程百分位数范围选取冠层顶部光子。另外,激光足迹形状同样会影响森林高度反演的准确性,尤其是在坡度较大的地区,激光足迹的形状会随地形坡度的变化而发生变化。
在生成连续的冠层顶部方面,已有研究一般采用样条函数方法对冠层顶部进行光子插值[18-19,33-35,40],但是与地形不同,森林冠层顶部会呈现出较大的起伏。采用样条插值的方法可能会产生龙格现象[43],导致获取的连续冠层具有较大的误差。GAO 等[42]利用基于距离的插值方法替代了样条插值,但该方法的插值精度依赖于冠层顶部光子的数量。
4.2 联合ICESat-2 数据与多源遥感数据的大范围森林高度反演研究
由于ICESat-2/ATLAS 卫星具有空间采样的特点,获取的树高呈条带状分布,不具备空间连续性。基于此,已有研究利用光学遥感数据具备空间连续性的特点,结合光子点云数据获取的高精度森林高度,采用人工智能算法建立森林高度预测模型,实现了大范围、空间连续的森林高度反演。LI 等[44]利用机载激光雷达数据验证了不同窗口尺度下ATL08 森林冠层高度产品,利用ATL08森林冠层高度产品联合Sentinel数据反演了中国东北地区森林高度,发现当窗口尺度为250 m 时,ATL08森林冠层高度具有最高精度,其中RMSE为1.95 m,相关性系数R2达到0.82。ZHU 等[45]利用机载激光雷达森林高度分析了多种误差因素对MABEL 光子点云数据反演的森林高度精度的影响,得出了信噪比、坡度及冠层光子密度对MABEL 光子点云数据森林高度影响的量化指标,发现当信噪比大于6、冠层光子数量为40~170 个、坡度小于25°时,MABEL 样本的森林高度精度最高,RMSE 为4.31 m,R2为0.7。基于此,筛除不可靠的森林高度样本,在机器学习的方法下联合Landsat数据反演了美国东部部分地区森林高度[45]。已有研究将光子点云数据获取的森林高度联合光学遥感影像反演了大范围、空间连续的森林高度,证明了光子点云数据联合多源遥感数据反演森林高度的有效性。已有研究对影响样本精度的误差因素的探究不够深入,尽管ZHU 等[45]分析了不同误差因素对样本精度的影响,但于分析的样本数量不多,模型迁移性有待进一步研究。另外,由于光学遥感影像不能够反映森林垂直结构,在植被密集区域反演的森林高度容易达到饱和。以后研究有必要考虑具有穿透能力的微波遥感数据共同反演大范围、空间连续的森林高度。
5 结论与展望
星载光子计数激光雷达具有采样率高、全球覆盖和全天候工作等特点,是未来对地观测任务的重要手段,被广泛应用于DEM生成,冰雪参数监测,建筑物高度反演等领域。在星载光子计数激光雷达数据处理和森林高度及林下地形参数反演方面,国内外学者取得了诸多进展,展现了星载光子计数激光雷达数据在森林高度及林下地形参数反演方面的巨大潜力。尤其是随着时间的推移,全球的激光雷达数据越来越密集,这对于全球地形测绘、森林高度反演、全球碳汇及植被变化监测等有着极其重要的研究价值。然而,已有研究仍有诸多待改进之处,主要体现在以下4 个方面。
1) ATL08 作为官方发布的地形和森林高度参数,被广泛应用于大范围、空间连续的森林高度及林下地形反演。已有研究利用机载激光雷达数据验证了ATL08 地形和森林高度参数的精度,探究了各种误差因素对ATL08 冠层和地形产品的影响,但并没有建立针对大范围应用的控制数据筛选机制。大范围控制数据筛选机制旨在剔除产品中较大的误差,为相关应用提供高精度的控制数据。另外,有必要对第五版ATL08 地形和森林高度参数的精度进行验证,对所产生的误差进行分析。
2) 光子点云数据中包含背景噪声光子,这些背景噪声光子是影响林下地形及森林高度反演的重要误差源。光子点云滤波旨在去除这些背景噪声光子。已有研究提出了大量光子点云滤波方法,其中,基于局部参数统计类的滤波方法更适用于森林区域。但基于局部参数统计的滤波方法在待进一步改进,主要体现在:在复杂地形及植被环境下阈值选取困难,单一参数无法准确表征光子点云空间密度关系,忽略了冠层光子密度异于地面光子密度这一事实,光子点云滤波前提假设有待改进。
3) 已有研究利用ICESat-2 光子点云数据开展了大量的森林高度和林下地形参数反演工作,但在地形复杂、植被茂密以及残留噪声光子较多时效果较差,能否用于反演大范围森林垂直结构参数有待进一步研究。针对林下地形反演而言,以后应针对植被密集和残留噪声光子等问题开展研究,提高在密集植被和残留噪声环境下的地形反演精度;针对森林高度反演而言,有必要对激光光斑实际足迹形状、沿轨向植被反射率及噪声密度差异进行物理建模,从而提高树高反演的精度及稳定性。
4) 对于联合多源遥感数据反演森林高度及林下地形参数而言,已有研究利用光学影像联合光子点云数据反演了大范围、空间连续的森林高度及林下地形参数。但光学影像不具备探测森林垂直结构的能力,对于植被密集地区,光学特征参数容易达到饱和。有必要利用具有穿透力的微波遥感数据联合光子点云数据共同反演森林高度及林下地形参数。需要注意的是,随着时间的推移,激光光斑足迹会发生变化,地物信号光子点云密度降低,从而影响光子点云滤波,从而直接影响参数反演效果。
