基于双耦合线圈的无人机轻量化无线充电耦合机构设计
2023-12-28安张磊寇苏雅蒲晓飞
李 阳,安张磊,孟 航,寇苏雅,蒲晓飞
(1.天津工业大学电气工程学院,天津 300387;2.天津理工大学天津市新能源电力变换传输与智能控制重点实验室,天津 300387)
无人机具有控制灵活、结构简单、造价低廉等优点,因此被广泛应用在工业、农业、航空航天和军事等领域[1-3]。无人机飞行时间作为衡量其性能的一个重要指标,决定了无人机的飞行范围、获取信息量、执行任务数量与质量,因此如何有效延长无人机的飞行时间尤为重要[4]。目前,延长无人机的飞行时间主要有以下3 种方法[5]:第1 种是增加无人机电池的容量,但是随着电池容量的增加,无人机的载重能力会受到影响[6];第2 种是设置地面基站为无人机更换电池,该方法可以解决无人机的续航问题,但是也存在操作复杂、需要人员值守和难以实现智能化的问题[7];第3 种是采用无线充电技术,无线充电可以通过非物理直接接触的方式来实现电能的传输,具有便捷性、可靠性和易于实现智能化的优势,且不会对无人机增加过多载重,因此无人机无线充电技术具有更为广泛的应用前景[8]。
对于无线充电技术,文献[9]设计了一种“8”字型接收线圈结构,接收线圈环绕式的绕制在无人机顶部防撞支架上,采用多个发射线圈安装在一个大范围的充电平台上,增加无人机容错位性,然而防撞支架顶部距离发射线圈较远,导致其电能传输效率较低,且可能导致磁通进入机体内干扰设备;文献[10]研制了一款单侧双极性耦合线圈结构,将接收线圈安装在无人机的单侧底部支架上,发射线圈采用磁场极性相反的2 个椭圆线圈,此耦合机构可成功对500 W 无人机实施无线充电,系统效率为90.8%,但是无人机的不平衡降落会使传输效率大大降低;文献[11]提出了一款位于无人机腹部位置的圆盘式接收线圈,发射线圈采用同心圆线圈设计,使得发射磁场较为均匀,提高了无人机的水平容错位能力,但其接收线圈绕制在塑料圆盘上,使得无人机侧的载重增加,飞行时的电能损耗增加,并且耦合面小、线圈匝数少,仅适用于小功率场合;文献[12]提出了一种垂直螺线管的磁耦合机构,其接收装置安装在经过改装的无人机起落架的底端,配合铁氧体插入发射机构中,可以有效降低系统漏磁,但含铁氧体的接收装置易在无人机起落过程中损坏,并且该结构需要改造无人机的起落架结构;文献[13]提出将平面空心接收线圈放置于机架的中心板下,系统传输功率为70 W,效率为89%,接收线圈重量较轻不会对无人机增加过多载重,但是接收线圈的安装位置占据了无人机下方大部分空间,导致其云台等设备无法安装。
由上述文献分析可知,无线充电技术在无人机方面的应用具有重要研究价值,尤其是耦合机构的研究对于性能提升至关重要,但是现有耦合机构的设计在结构适应性、电磁干扰、轻量化等方面尚未进行深入的研究[14]。本文在前人研究的基础上,综合考虑无人机无线充电的需求,首先采用梯形发射平台固定无人机支架解决抗偏移问题,然后充分利用无人机支架的形状、空间和位置设计线圈,最后以轻量化为目标对发射线圈和接收线圈进行了设计与优化。
1 无人机无线充电系统整体设计
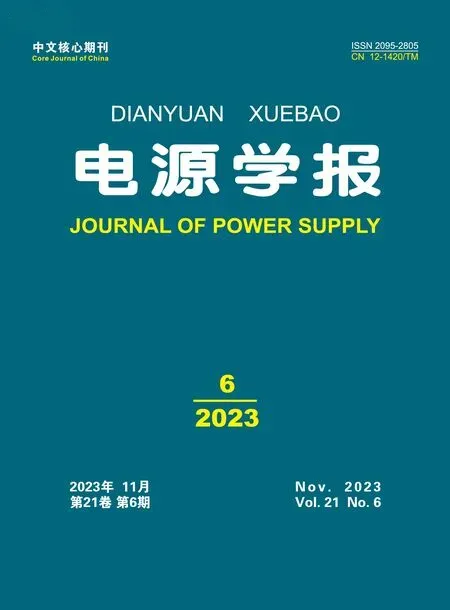
无人机在降落过程中,易受气流、地形和风速等多种因素的影响,容易出现降落位置偏移的情况,对于无线充电系统而言,耦合机构的位置偏移会严重影响充电功率和效率。此外,还要考虑耦合机构的结构、安装位置与无人机的适应性,减小其对无人机飞行状态和能力的影响,同时保障耦合机构不对无人机造成电磁干扰。基于上述思考,本文提出了无人机无线充电系统的整体设计方案,其结构如图1 所示,主要包括高频电源、梯形发射平台、耦合机构、整流与调压电路和负载(无人机电池),Cp和Cs分别为原边与副边耦合机构的补偿电容。高频电源产生10~100 kHz 的正弦电流,经过原边发射装置后产生交变磁场;副边接收装置通过磁耦合方式接收原边电能,再经过整流与调压电路变化成电池需要的直流电,继而为电池充电。
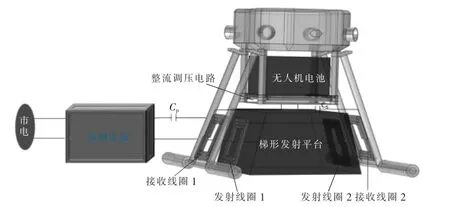
图1 无人机无线充电系统整体结构Fig.1 Overall structure of wireless charging system for UAVs
为了减小无人机在降落时受环境因素影响而导致的位置偏移,确保其在降落时的定位准确,同时为高效的无线充电提供保障,本文采用梯形发射平台来固定无人机位置。无人机顶部和腹部位置距离发射平台较远,且耦合机构产生的磁场会对其造成一定干扰,因此不宜安装接收线圈。无人机最下侧的支架部分对无人机起到支撑作用,没有精密部件的存在,因此,本文设计将接收线圈安装在无人机支架位置,以此来减小耦合机构磁场对无人机的干扰并避免接收线圈对无人机飞行状态和能力的影响。同时,为减少因无人机位置偏移而导致的电能损失,平衡无人机重量并增加无线输电功率,本文设计在两侧支架上均安装接收线圈,同时为实现高效的耦合电能传输,将发射线圈和接收线圈采用相同的结构和参数,并确保位置对齐。
本设计中两侧发射线圈采用顺向串联的形式进行连接,以保证两侧发射线圈通过大小相同的电流,使其电流的涡流方向相同,从而在传输电磁信号时具有相同的相位和方向,使电磁场可以更加集中在梯形发射支架中,减小因磁场的泄漏和辐射对无人机造成的干扰,使电流流动更为稳定和连续。两侧接收线圈与发射线圈同样采用顺向串联连接的形式,使其高效和可靠地接收电能。
无人机无线充电系统需要对系统的无功功率进行补偿,从而增大传输功率和效率,目前无线充电的基本补偿结构有4 种,分别是原边串联-副边串联SS(series-series)、原边串联-副边并联SP(series-parallel)、原边并联-副边并联PP(parallel-parallel)、原边并联-副边串联PS(parallel-series)。由反射阻抗原理的推导可知,SS与SP 补偿结构的补偿电容与负载电阻无关,PP与PS 补偿结构的补偿电容与负载电阻有关。值得注意的是,无人机电池在充电过程中其负载会随时间的增加而增大,这使得系统电路无法一直处于谐振状态,不能实现持续高效率传输电能。相比SP 补偿结构,SS 补偿结构的拓扑具有恒流输出特性,其功率因数不受负载电阻的影响,更加适用于锂电池充电场合,故本文采用SS 补偿结构。
本文设计的耦合机构需要满足中大型无人机电池的充电功率需求,对于无线充电而言,增加线圈匝数和长度可以增加其磁场密度;在耦合机构中加入导磁性良好的材料可以增大传输功率和效率,但同时会增加耦合机构的重量,对于无人机而言,过重的耦合机构会对其载重能力和飞行效率造成影响。无人机无线充电耦合机构的主要参数有:线圈长度、线圈匝数、磁性材料与系统传输频率等,在耦合机构的轻量化设计中不同参数相互耦合,对系统影响比较复杂,设计难度大,且设计周期长,因此,本文采用有限元仿真的方式对参数进行优化。
2 耦合机构轻量化设计与参数优化
本文所设计无线充电系统的耦合机构需要在不影响无人机飞行状态和能力的同时,满足最大充电电压48 V、最大充电电流20 A 的电气需求,且在小范围内发生位置偏移时,系统仍具有较高的传输效率。目前常用的耦合线圈形状包括圆形和矩形2 种形式,相比于圆形线圈,矩形线圈具有良好的形状匹配能力,产生的磁场更为均匀,并且矩形形状与无人机支架相同,可以紧密缠绕在无人机支架部位,防止掉落,从而更好地适应无人机的机身形态和空间限制,满足无人机无线充电的需求,因此本文发射和接收线圈均采用矩形形状。为满足无人机电池最大充电电流20 A 的电气需求,本文选用横截面积为3 mm2的500 股利兹线。使用COMSOL有限元仿真软件搭建耦合机构仿真模型,计算得到模拟电源对接收线圈的输出功率与模拟等效负载两端的输入功率的比值,从而得到耦合机构的传输效率;通过参数扫描的方式,对线圈匝数、线圈长度、工作频率与铁磁材料的参数进行变更,从而对不同参数下耦合机构的传输效率对比分析,以此对双耦合线圈耦合机构的参数优化设计。
发射线圈和接收线圈传输距离越近其传输效率越高,但对于无人机而言,需要留有一定空间裕量便于其顺利起降,因此传输距离选定为10 mm。为使接收线圈与无人机支架有更好的适应性,将其宽度与支架宽度保持一致,固定为130 mm。同时,按照无人机快速无线充电的功率需求,系统输出功率需要大于等于1 kW。因线圈长度、工作频率也是重点研究参数,故采用控制变量法进行参数优化。
根据无人机支架结构,线圈长度最大为180 mm,因此先研究线圈长度为180 mm、耦合机构不加入磁性材料时的参数对传输效率的影响。在不同传输频率下,分别改变耦合线圈匝数,得到不同频率下线圈匝数与传输效率的关系,如图2 所示。
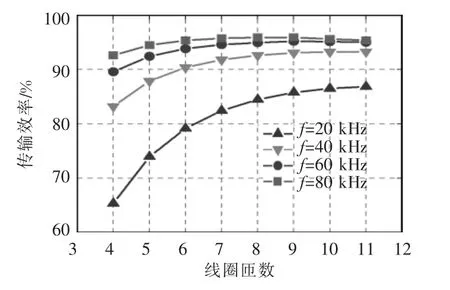
图2 线圈匝数与传输效率关系Fig.2 Coil turns versus transmission efficiency
由图2 可知,在传输频率60 和80 kHz 下,不同线圈匝数的传输效率均可保持在90%以上,而传输频率20 和40 kHz 下的传输效率与前两者差距较大,因此传输频率为60 或80 kHz 时更佳。传输频率为60 kHz、线圈在匝数为8、9、10、11 时传输效率较大,分别为94.959%、95.220%、95.140%、95.046%;而传输频率为80 kHz、线圈匝数为8、9、10、11 时传输效率较大,分别为95.918%、95.930%、95.623%、95.400%。虽然线圈9 匝时效率最大,但与线圈8 匝效率差距不大,因此考虑轻量化原则,选定匝数为8。
在不同传输频率下,分别改变耦合线圈长度,得到不同频率下线圈长度与传输效率的关系,如图3 所示。
图3 线圈长度与传输效率关系Fig.3 Coil length versus transmission efficiency
由图3 可知,在传输频率60 和80 kHz 下,不同线圈长度的传输效率均可保持在90%以上,而传输频率20 和40 kHz 下的传输效率与前两者差距较大,因此传输频率为60 或80 kHz 时更佳。传输频率为60 kHz、线圈在长度为120、130、140、150、160、170、180 mm(线圈长度最大值)时的传输效率分别为92.022%、92.855%、93.522%、93.996%、94.216%、94.679%、95.132%;传输效率增长率由0.90%逐渐减小为0.22%,当线圈长度从120 mm 逐渐增加到160 mm 时,传输效率的增长率呈现逐渐缓慢的态势;而在160 mm 之后增长率下降趋势更为平缓,故线圈长度大于160 mm 时,每增长10 mm 其传输效率增加效果不显著;传输频率为80 kHz、线圈长度 为120、130、140、150、160、170、180 mm 时的传输效率分别为94.025%、94.581%、95.033%、95.325%、95.574%、95.761%、95.921%,传输效率增长率由0.59%减小为0.17%,当线圈长度从120 mm 逐渐增加到160 mm 时,传输效率的增长率呈现逐渐缓慢的态势,而在160 mm 之后增长率下降趋势更为平缓。虽然线圈长度增加时效率会随之增大,但传输效率改善不显著,且会使无人机载重增加,因此考虑轻量化原则,选定长度为160 mm。
从上述仿真结果对比中可以看出,系统传输频率越高,耦合线圈在不同参数下的传输效率越高,并且在传输频率为60 和80 kHz 时,耦合机构传输效率在不同参数下均大于等于90%。然而较高的传输频率会增加电源的开关损耗,并对无人机造成电磁干扰,因此在设计无人机无线充电系统时需要权衡传输频率与其他因素之间的平衡,故本文选择60 kHz 为系统传输频率。
同时,为探究磁性材料对耦合机构传输效率的影响,固定线圈的匝数为8、长度为160 mm、工作频率为60 kHz,在输出功率为1 kW 时,改变磁性材料(铁氧体)在耦合机构中的安放位置,得到不同传输距离下磁性材料安放位置与传输效率的关系,如图4 所示。
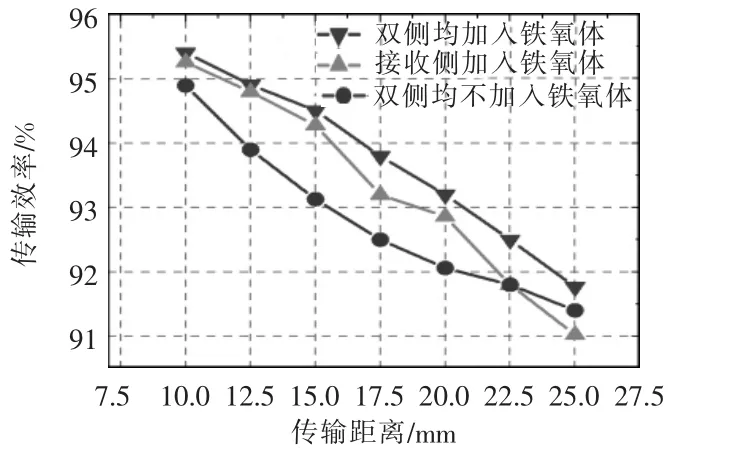
图4 磁性材料不同安放位置与传输效率关系Fig.4 Relationship between different placement positions of magnetic materials and transmission efficiency
由图4 可知,随着传输距离的增加,传输效率会随之降低。在传输距离为10 mm 时,耦合机构中不加磁性材料时的传输效率为94.90%,接收侧加入磁性材料时的传输效率为95.26%,发射侧和接收侧均加入磁性材料时的传输效率为95.41%。接收侧加入磁性材料与双侧均不加入磁性材料相比传输效率增加了0.36%,双侧均加入磁性材料与双侧均不加入磁性材料相比传输效率增加了0.51%,尽管耦合机构中加入磁性材料后的传输效率有所提升,但相比之下效率改善不显著,且会增加无人机侧的载重,因此考虑轻量化原则,耦合机构中不加入磁性材料。
通过仿真分析,明确了耦合线圈匝数、长度、工作频率和磁性材料对耦合机构传输效率的影响,并按照轻量化原则选取了优化后的参数。但在实际应用中,这些因素同时存在,且和系统中其他因素相互作用。本文为了更加真实地模拟系统运行情况,对仿真结果进行验证,搭建了无人机无线充电实验系统。
3 实验验证
本文以塑料支架代替无人机支架搭建了无人机无线充电实验系统,如图5 所示,其中包括高频电源、耦合机构、模拟梯形发射平台、补偿网络和无人机电池模拟负载。实验系统中耦合线圈的参数、补偿结构数值以及系统频率等参数如表1 所示。耦合机构中的耦合线圈是由横截面积为3 mm2的500 股利兹线绕制而成,模拟发射平台与目标无人机的倾斜角度相同,逆变电源连接到耦合机构内侧串联发射线圈上,两侧串联接收线圈与双发射线圈保持正对,其后接高频整流电路进而对无人机模拟负载进行供电,用功率分析仪实时测量耦合机构发射线圈和接收线圈上的电压、电流与功率。
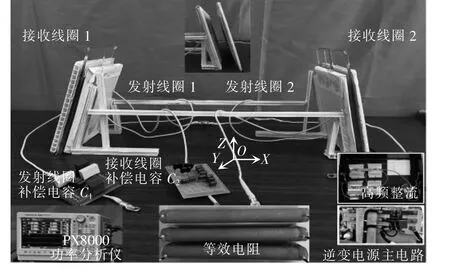
图5 无线充电实验系统Fig.5 Wireless charging experimental system
在传输距离为10 mm,系统工作频率为60 kHz,良好对准的工作条件下,对系统进行测试,功率分析仪所测得实验数据如图6 所示。发射线圈输入电压为75.355 V,输入电流为18.679 A,输入功率为1.245 4 kW,等效负载充电电压为80.634 V,充电电流为16.995 8 A,同时输出功率为1.190 05 kW,因此耦合机构传输效率为95.554%。实验结果表明,该耦合机构可以高效地为无人机负载传输电能。
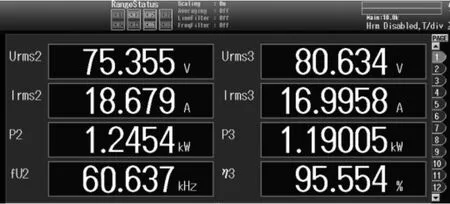
图6 输入、输出功率测试数据Fig.6 Input and output power tests data
为验证无人机着陆位置偏移时对耦合机构传输效率的影响,本文对Y 和X 两方向整体偏移情况下的传输效率变化进行实验验证,其中XYZ 三维方向如图5 所示,以两侧线圈的几何中点为坐标原点。在两侧传输距离为10 mm 时,得到无人机在沿Y 轴正方向不同偏移距离下与传输效率和耦合线圈互感变化的关系如图7 所示。
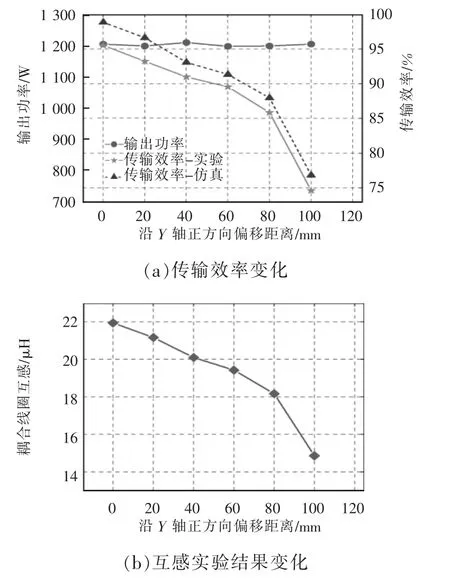
图7 沿Y 轴不同偏移距离下传输效率与互感变化曲线Fig.7 Curves of transmission efficiency versus mutual inductance at different offset distances along Y-axis
由图7 可知,随着偏移距离的增加,传输效率与耦合机构之间的互感会随之减小。由图7(a)可知,偏移距离为80 mm 时,传输效率降低为85.65%,当偏移距离为100 mm 时,传输效率降低为74.64%。由图7(b)可知,偏移距离80 mm 以内,耦合机构偏移步长为20 mm 时,互感值平均减小0.9 μH;偏移距离大于80 mm 后,互感值减小量增大为3.31 μH。在偏移距离超过80 mm 后,耦合机构传输效率与互感值减小趋势增大,因此,该耦合机构在沿Y 轴正方向0~80 mm 范围内具有良好的抗偏移传输特性,与仿真结果趋势相同。
改变耦合机构的传输距离分别为10、15 和20 mm,以5 mm 为步长将接收线圈逐渐的沿X轴正方向进行偏移,实验得到不同偏移距离与传输效率和耦合线圈互感变化关系如图8 所示。
由图8 可知,当两侧传输距离相同时,耦合机构传输效率与互感均会随着传输距离的增加而减小。由图8(a)可知:传输效率随着传输距离的增加而下降,当传输距离扩大到20 mm 时,传输效率为92.34%,因此在左右对称的距离下,可以实现无人机电池电能的稳定有效传输;当两侧传输距离不同时,即一侧传输距离增加而另一侧传输距离减少的情况下传输效率呈现下降趋势;当一侧的传输距离为0 时,与没有发生偏移时相比,传输效率会有所降低;在传输距离为15 mm,向左偏移15 mm,即传输距离为左30 mm 和右0 时,传输效率为89.46%;在传输距离为20 mm,向左偏移20 mm,即传输距离为左40 mm 和右0 时,传输效率为84.75%。由图8(b)可知:耦合机构互感随着传输距离的增加而下降,当传输距离扩大为20 mm 时,互感为20.75 μH,相较于传输距离10 mm 时的21.88 μH,降低了1.13 μH,因此在左右对称的距离下,互感变化量较小;当两侧传输距离不同时,在一侧传输距离增加而另一侧传输距离减少的情况下耦合机构的互感也呈现下降趋势;当一侧的传输距离为0 mm 时,与没有发生偏移时相比,互感会明显降低;在传输距离为20 mm,向左偏移20 mm,即传输距离为左40 mm 和右0 时,耦合机构互感为15.87 μH,此时传输效率为84.75%。因此,该耦合机构在沿X 轴正方向0~40 mm 范围内,均可保持较高的传输效率,与仿真结果趋势相同。
为进一步观察耦合机构在不同方向的偏移特性,得出在传输距离为10 mm 时,耦合机构位置正对与沿Y 轴正方向偏移100 mm 时的电压和电流变化实验波形;在传输距离为20 mm 时,沿X 轴正方向偏移20 mm 时的实验电压和电流变化波形,如图9 所示。
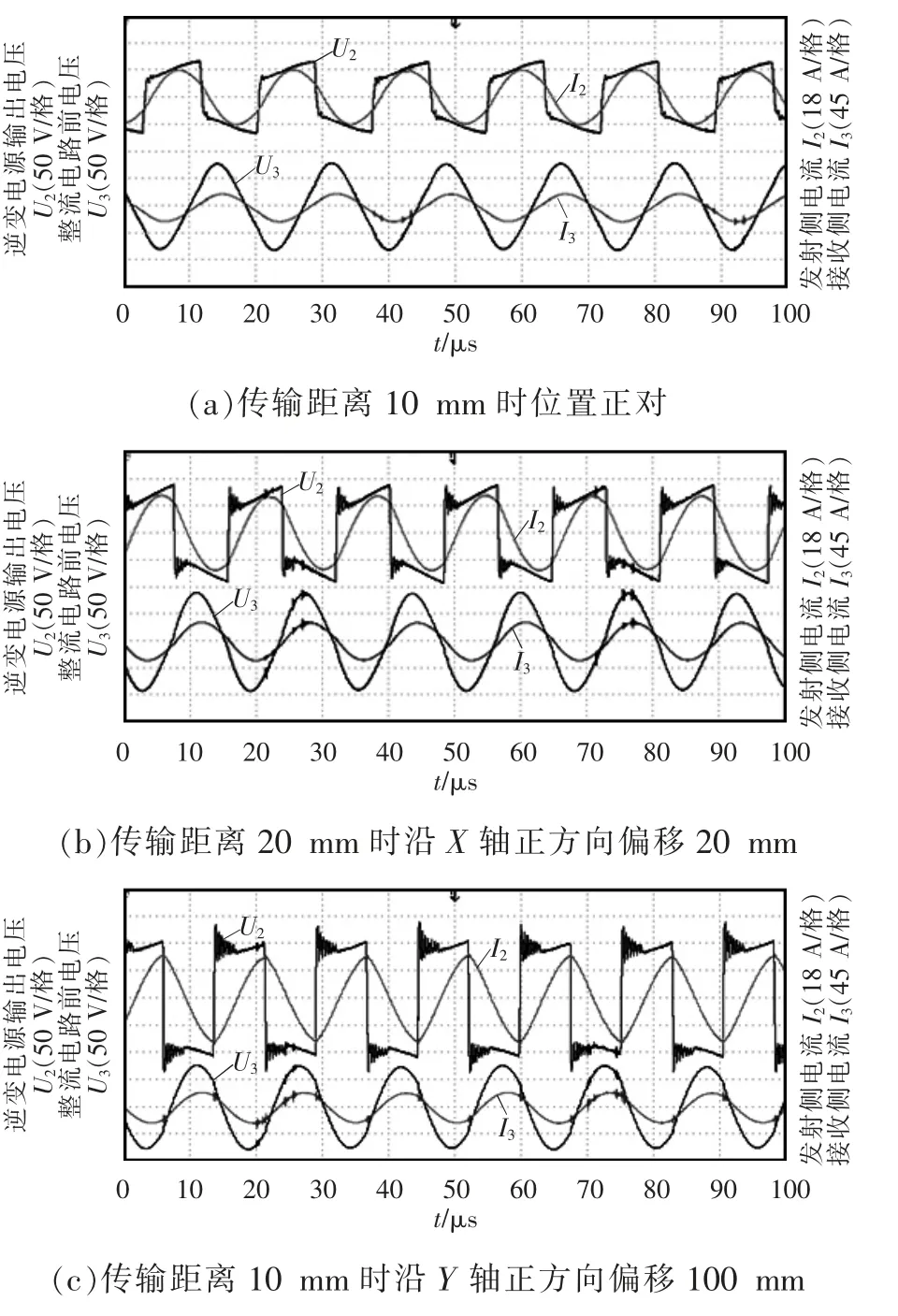
图9 不同偏移程度时的相关实验电压和电流波形Fig.9 Correlated experimental voltage and current waveforms at different offset levels
为保持接收侧的接收功率不变,增加了高频逆变电源的输出电压和功率。由图9 可知:耦合机构沿X 和Y 轴方向偏移时,发射线圈两端电压相位会超前于电流相位,从而使耦合机构工作在感性状态,使得无线充电过程中的无功增大,耦合机构传输效率降低;沿X 轴正方向偏移时的电压纹波相比于Y 轴的小;耦合机构在沿X 轴方向偏移20 mm时其相位变化量与电源电压增大量均比沿Y 轴方向偏移100 mm 时小,其传输效率对比位置正对时下降幅度较低。因此,耦合机构沿X 轴方向的抗偏移能力优于Y 轴方向。
4 结论
本文设计了一种应用于中大型无人机的接收侧轻量化无线充电耦合机构,并具有良好的抗偏移特性。通过有限元仿真对比分析的方法,研究了耦合线圈在不同线圈匝数、不同长度、在不同位置加入铁氧体和不同系统频率下对无线充电传输效率的影响,结合轻量化设计原则优化了设计参数。最后通过实验验证了该耦合机构在不过多增加无人机侧载重的同时具有较高的传输能效,且具有一定的抗偏移能力,所得结论如下。
(1)本文所设计耦合机构可有效对无人机电池以1.2 kW 功率进行充电,传输效率为95.554%,无人机侧耦合机构重量为320 g,因此该耦合机构可以实现对无人机电池的高效能无线充电,并且位于无人机侧的重量小,满足耦合机构轻量化设计的需求。
(2)对耦合机构在无人机纵向(Y)和横向(X)两个方向下对其偏移特性进行实验分析可知,在1 kW接收功率等级下,无人机在纵向0~80 mm、横向0~40 mm 范围内产生偏移时,耦合机构传输效率都大于等于85%,抗偏移性较好。