一种海域无人机集群动态组网传输与动态调度方法
2023-12-28秦凡
秦凡,李 明
(1.北京理工大学宇航学院,北京 100081;2.中国卫通集团股份有限公司,北京 100190;3.天津航天中为数据系统科技有限公司,天津 300301)
0 引言
无人机航空遥感监测作业受海上风浪、潮汐、光照等因素影响,导致海上飞行作业时间窗口期较短,传统的单机作业模式难以快速获取大面积海域的监测数据。无人机集群组网采用多机并行作业方式[1],采用统一的通信协议解决跨海域协同和指挥调度问题,以节点数量换取时间,能有效提高监测效率[2]。同时,海域动态监管目标和任务类型复杂多样,无人机集群的每一架飞机作为一个动态任务节点,其开始和结束时间具有较强的随机性和动态性,海域无人机集群组网监测首先要解决的是网络间动态通信问题,特别是集群路由管理和节点动态接入控制方法,使集群网络节点的增加不会对网络通信造成明显负担。
海域无人机集群组网通信要求在产生端到端多跳拓扑时,确保不会因为路由计算过程导致丢包率上升和延时急剧增大,因此除了一般的无线组网路由需要考虑的因素以外,还要特别注意以下几点:
1)随着无人机集群节点入网和退网,通信网络拓扑频繁变化,信道变得不稳定[3],因此要做到路由可靠转发必须考虑鲁棒性设计;
2)点对点通信的极低延时条件对寻径延时要求极高[4],因此需采用主动路由思想。同时,需在动态拓扑变化与网络路由开销两者做到较好平衡[5-6],因此信源和信道自适应路由思想较为适合;
3)遇到路由转发节点暂时不可用的情况,要求立即切换到备份路由[7],或直接采用多径路由并发传输高优先级业务[8-9]。
本文根据海域无人机集群多任务综合化特点,将无人机节点按照任务类型分簇,簇内设计改进的自组网DSDV,按照任务类型的信息传输需求以及信道环境感知结果来实时动态配比各簇网络带宽,提高网络化传输效率,采用以吞吐量作为路由的链路度量标准代替过于简单的Bellman-ford 最短距离路径算法,提升传输稳健性。
针对海域无人机集群工作中单元无人机需要频繁接入、退出的需求,本文在MAC 层设计基于按需分配的分布式高动态随机接入协议和基于比例公平算法的动态资源调度方法,目的是解决无人机集群节点的部署、使用、入网、退网、撤收的不确定性,明确节点任务类型和角色分工,实现实时调整,避免在通信过程中出现多个接入请求冲突问题。
1 分簇目的节点序列距离矢量路由协议设计
1.1 分簇算法
DSDV 最大的弊端是每个节点都需要维护一个数据很多的路由表[10-11]。在无人机集群庞大的节点基数条件下,会对网络的扩展性产生致命影响。为提高网络通信性能,本文首先依据无人机集群中节点任务类型确定分簇数目和规模,预置各簇网络带宽,设计提出基于DSDV协议的分簇算法。
分簇DSDV路由算法具体包括:
1)邻居节点建立:在初步分簇规划范围内的节点向邻居节点发送Hello 包,收到Hello 包节点且反馈信道环境感知良好(满足预设要求),将其节点纳入自己的邻居节点表中;
2)簇首选择:找到该首节点所有两跳之内的节点,然后查看这些节点的邻居节点表,当存在某一节点的邻居大于当前首节点的邻居数时,选取该节点作为簇首,设置该节点跳数h=0,并确定簇号;
3)边界节点确定:到簇首的跳数h=2 的节点为该簇的边界节点,选取边界节点的未分簇邻居节点作为首节点,若边界节点的邻居节点都分簇成功则跳转至5);
4)散节点的确定:查看首节点的邻居节点列表,若该节点邻居列表非空,则跳转至2),继续建簇操作;否则设置该节点到簇首跳数h=3,并将该簇首字段标记为邻居节点的簇首字段,表明本节点为该簇的“隐藏节点”,即散节点,跳转至3);
5)分簇算法完成:根据步骤1)至5)形成网络拓扑结构和分簇DSDV 路由协议,所述网络拓扑结构中只在两跳之内选取簇首,分簇后簇间通过簇首衔接交互,降低网络传输延时。
分簇算法流程如图1所示。
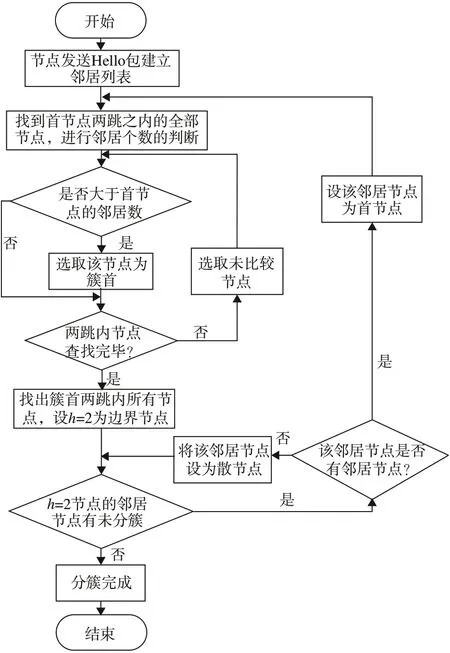
图1 分簇算法流程Fig.1 Flow chart of clustering algorithm
图2展示了分簇算法后的网络结构,为避免簇过大或交叉分簇等问题的发生,簇首只选取两跳之内的节点,同时选取边界节点的未分簇邻居节点作为下一簇的初始节点。图所示分簇网络架构除了可以通过寻址握手自主分簇以外,无人机集群也可在任务规划时根据监测环境、目标特点等由地面测控站中心节点预先将无人机节点被动分簇,并指定簇首的选择规则和递补次序,一方面简化分簇流程,加快分簇速度,另一方面优化分簇效果,提升监测效能。
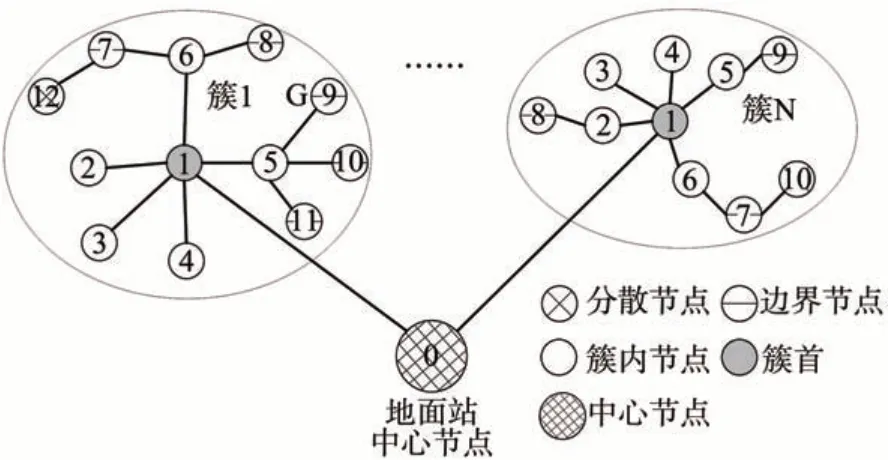
图2 分簇算法后的网络结构Fig.2 Network structure after clustering
1.2 路由规划
建立分簇DSDV 路由规划,将节点的吞吐量作为链路的度量标准,不单纯以空间距离为路径选择依据,而是充分考虑多径、机体遮挡等因素对信号传输质量的影响,优化网络临时建立中继节点时消耗的网络资源。
图3 展示了源节点到目的节点之间的3 种不同情况下的拓扑结构。(1)表示源节点到目标节点之间不存在中继转发节点,(2)表示源节点通过仅有的一个中继转发节点到目标节点,(3)表示源节点通过两个不同的中继转发节点到达目标节点。
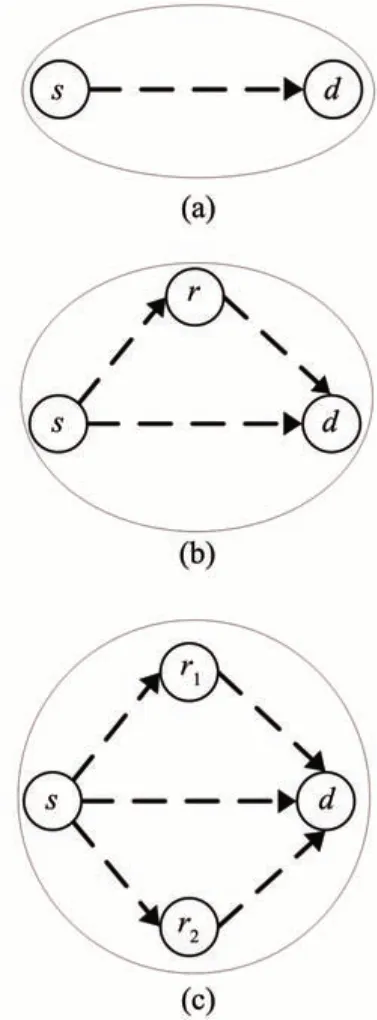
图3 节点拓扑结构示意图Fig.3 Schematic diagram for node topology
以下计算不同拓扑结构下的吞吐量:节点的发射功率Ps与接收功率Pr的关系式满足:
式中:ds-d为发射节点到接收节点的距离;-α代表路径衰减参数;S代表发射信号的单位功率;ns-d代表节点噪声功率,则无线通信中自由损耗L可表示为
无人机集群实际飞行任务中不仅存在自由损耗,而且存在遮挡、多径,进一步得到在典型航空瑞利信道衰落模型链路正常工作的概率为:
式中:N0表示服从瑞利分布的复高斯随机变量方差,令
则图3(a)中的链路可正常工作的概率为:
图3(b)链路正常工作概率的计算公式为:
图3(c)链路正常工作概率的计算公式为:
建立簇内路由时,若目标节点是该节点的邻居节点,则数据包将直接发送给目的节点,如图3(a)中直接将数据包由s发送至d。设数据传输速率为Ro,链路正常工作的概率为Po,此时的网络吞吐量设置为:
当目标节点有1 个中间节点r时,如图3(b)所示,网络吞吐量为:
如果源节点与目的节点之间存在2 个节点r1,r2时,如图3(c),网络吞吐量表示为:
对于既定的源节点与目的节点,吞吐量定义为路径中每一节点发送和接收的最小值,通过最大化链路中每一跳的吞吐量,以此提高网络总体的吞吐量,实现高速低延时网络传输:
为实现网络性能最大化的目标,首先计算链路正常工作的概率找到最佳链路传输路径,并以此链路作为标准去选择更为合适通信的路径。
2 海域无人机集群节点随机接入设计
2.1 动态随机接入协议
随机接入是集群节点之间建立无线链路的必经过程。只有节点完成入网之后,无人机集群之间才能正常进行数据互联互通[12]。针对不同应用环境下集群网络不同无人机类型遥控、遥测及侦察数据的组网传输需求,从顶层规划异型平台消息格式,统一信息交互机制,解耦物理接口[13]。
2.1.1 标准化消息互认格式
对于无人机集群无中心的互联互通网络,本文采用时分多址技术(TDMA),把时间分割成不同的时间片段(帧),再把帧分割成不同的时隙,再将每个时隙被唯一的分配给一个无人机节点,且无人机节点只能在分配给它的时隙中运行,在时间同步的情况下,每个节点可以在各自时隙中进行通信而相互不受干扰。
本文设计兼容固定时隙TDMA 方式[14]和动态时隙TDMA[15-16]方式的通用型动态时隙分配协议,设计最小固定时隙时帧结构,其包含固定时隙个数,形成固定结构的时帧模块。而通过时帧模块的简单堆叠,即可实现动态时隙方式,大大降低了动态时隙分配算法的复杂度,又同时避免了固定时隙所带来拓扑结构不灵活的问题。标准化时帧结构如图4所示。

图4 固定标准化时帧结构示意图Fig.4 Schematic diagram for fixed normalized time frame structure
为了兼容不同数据发生率和包长度,适用于多个型号协议,采用分组业务、封装业务等分包方式设计固定长度和可变长度相结合的弹性封装帧协议,依据VMF 消息和CCSDS(Consultative committee for space data systems)协议标准[17],将固定长度数据帧放入数据链通用传输帧。通用时隙的帧结构示意如图5所示。

图5 通用时隙传输帧帧格式Fig.5 Frame format of universal time slots transmission
分包传输帧包含前导码、帧识别码、密码同步字和数据帧源包。源包由包主导头和包数据域组成,两者都是必需的,且无缝排列。包主导头的长度固定,包数据域长度可变。在实际应用中源包长度要恰当,源包太短,传送效率低;源包太长,要被截为多端装入传送帧,操作复杂,而且容易因为错误而丢失整包,包长不大于三个传送帧数据域。通用时隙主要用于传输业务数据、控制指令和状态信息等通用型数据,而公用时隙主要用于紧急信令和随机入网申请,因此,公用时隙帧结构要比通用时隙的帧结构短得多,其帧结构如图6所示。
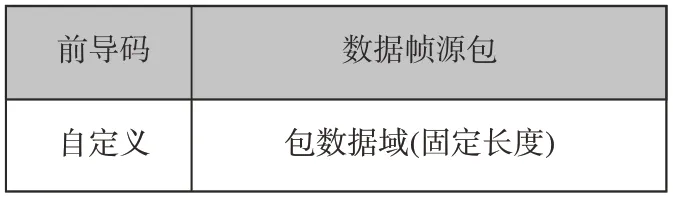
图6 公用时隙传输帧格式Fig.6 Frame format of public time slots transmission
2.1.2 按需分配随机接入
在标准化消息格式以后,无人机节点具备了接入网络的认证条件。本文设计按需分配随机接入准则时对无人机集群组网环境做如下假设:
1)数据冲突是传输失败的唯一原因;
2)每个节点都有自己的唯一ID,ID 号从1开始连续递增;
3)网络中的节点总数有上限,节点可能频繁接入网络,负载不平衡;
4)网络中有时统中心,时统节点可以通过一个或多跳与其他节点连接。时统节点的ID 号为1(设置时统节点,或默认第1个入网的节点为时统节点,以其时钟为全局时钟)。
为实现网络节点的随机接入,发送和接收采用应答机制,发射过程通过广播时隙分配表通告当前接入的平台数量及预约时隙位置,待接入节点可在预约时隙发送接入请求,时统节点对接入请求做出判断,如果准许接入则通过广播通告更新后的时隙分配表,如果禁止接入则通过广播通知待接入节点继续等待或执行其它操作。接收帧结构设计中每复帧的最后一个时隙为固定分配时隙,用于接收时隙预约请求,发送帧结构设计中第一个时隙发送时隙分配信息信令,每个时隙划分为1~k个子时隙,k值大小由簇内中心节点根据网络负载动态分配。发送接收时隙设计如图7所示。
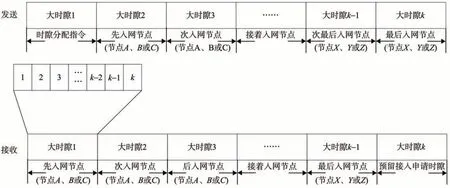
图7 时隙预留随遇接入示意Fig.7 Time slot reservation for random access
图中,每个时隙节点的状态用代表节点状态的S(State)和代表目标的T(Target)表示,即用组合(S,T)来表示。在时隙h内节点A要发送或接收数据包,目标T指的是与节点A距离为1 跳的邻居节点。所以在时隙h中的节点状态共有如下7种类型:
1)传输状态(Transport)—节点向邻居节点a发送数据包:(S=Transport,T=a)。如果节点发送的数据包是广播分组,则定义T=Broadcast;
2)接收状态(Receive)—从邻居节点b接收数据包:(S=Receive,T=b);
3)传输阻塞状态(Block_t)—至少一个邻居节点正在接收数据包,且没有邻居节点正在发送数据包;
4)接收阻塞状态(Block_r)—至少一个邻居节点正在发送数据包,且没有邻居节点正在接收数据包;
5)传输接收阻塞状态(Block_tr)—至少一个邻居节点正在发送数据包,且至少一个邻居节点正在接收数据包;
6)碰撞(Collision)—节点在接收数据包时检测到一个碰撞;
7)空闲状态(Idle)—没有邻居节点处于接收或发送数据包的状态。
需要注意,目标仅在发送状态或接收状态下发挥作用。此外,节点在一个时隙中只能处于这七种状态之一且节点之间状态相互独立。当节点不发送数据时,其所在的时隙称为被动时隙。无人机节点随机入网流程如图8所示。
针对多个无人机节点同时提交接入申请的冲突问题,对各节点接入请求时间做随机振荡处理,即节点不能每次都发送接入申请,而是在预备接入网络时刻起,随机延迟n个复帧周期发送请求(n为一定范围内的随机数)。接入示意如图9所示。
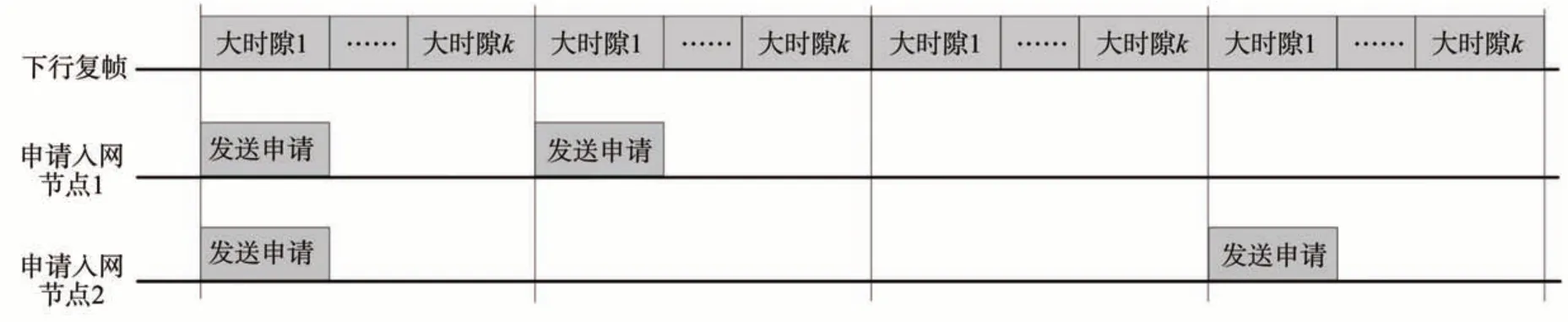
图9 多节点入网冲突解决示意Fig.9 Conflict resolution for multi-node access
2.2 最优吞吐量动态资源调度
在无人机集群通信网络的数据传输过程中,任务调整和角色变换时,需要在系统通信模型的基础上有针对性地制定集群网络通信系统资源调度策略。经典的无线网络通信系统资源调度算法主要有:轮询(Round robin,RR)算法[18]、最大吞吐量(Maximum throughput,MT)算法[19]和比例公平(Proportional fairness,PF)算法[20]。
本文针对无人机集群协同系统,在传统PF算法的基础上进行改进,提出广义比例公平(Generalized proportional fairness,GPF)算法。该算法通过在系统初始化阶段引入比例因子的方式实现系统吞吐量与无人机速率公平性的折中,不同数值的比例因子对应两者不同程度的折中,从而做到灵活调节折中程度。另外,GPF算法还可以克服传统PF算法只能实现短期用户间速率公平性的缺点,实现长期的公平性。
本文假设GPF算法引入的比例因子为a∈[0,+∞)和b∈[0,+∞),调整a和b的值,以灵活调整系统吞吐量和无人机速率公平性之间的折中。信道被化分成S个RU(资源单元),每个RU 由数目相等的单元时隙构成,时域多用户传输以帧为单位。用户在每个RU 上选取具有最大广义比例公平因子的用户m进行传输。广义比例公平因子的定义如下:
所有资源单位按照下式所示规则选出最佳用户m*:
式中:rm(t-1)表示用户m在上一帧的实际传输速率;T表示滑动窗口的时长。系统初始化时,比例因子a、b的比值选取影响着每帧的调度结果,不同的a/b值反映了系统吞吐量和用户速率公平性间不同程度的折中。通过设置GPF 调度方法中的a,b配置数值,优化吞吐量性能。
利用Matlab 对GPF 算法性能进行仿真。仿真过程中设置多组a、b参数值,对比不同参数组合下系统吞吐量和速率公平性的走势。
在测试GPF 算法系统吞吐量性能时,设定5 组a、b参数的典型组合,得到系统吞吐量与无人机数量关系走势如图10所示。横向来看,图反映了无人机集群节点动态接入过程中,系统吞吐量的变化趋势。纵向来看,系统吞吐量随着a与b的比值增大而提高:这是因为增大a减小b时GPF 算法更多追求提高系统吞吐量,而在一定程度上忽略了对用户间速率公平性的考虑,此时每个传输帧中信道状态较好的用户比信道条件差的用户获得更大的传输机会,因此获得较大的系统吞吐量;相反,减小a增大b时GPF 算法更多追求用户间速率公平性而导致系统吞吐量有所损失。
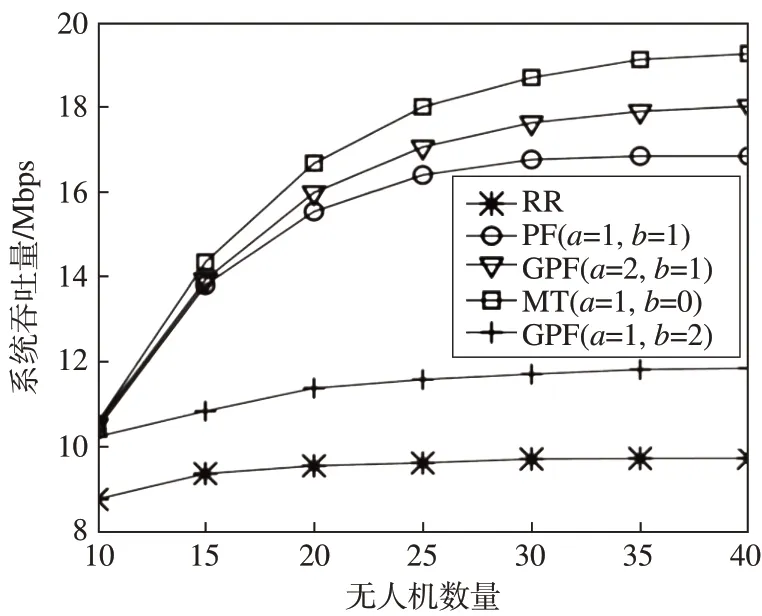
图10 典型a、b配置下系统吞吐量与无人机数量关系Fig.10 System throughput vs.number of UAV in typical a and b configurations
在测试GPF 算法速率公平性时,设定无人机节点数为30,分别观察时长为30 s 的长期速率公平性(图11)和100帧数据时长的短期速率公平性(图12)。如图11所示,随着a与b比值的增加,速率公平性呈下降趋势,当a=0,b=1 时,虽然吞吐量很低,但此时可以保障最低平均速率用户也能传输,即系统速率公平性表现很好;当a=1,b=1时,用户速率公平性方面表现并不是很好;而当a=1,b=3 和a=1,b=2 时,系统吞吐量和用户速率公平性都得到较好的折中。
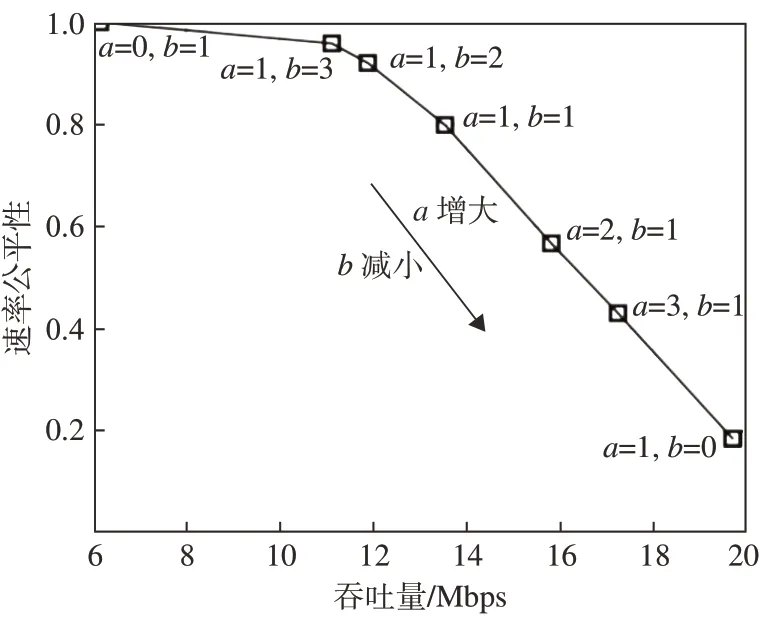
图11 系统吞吐量与长期速率公平性的关系Fig.11 System throughput vs.long-term rate fairness
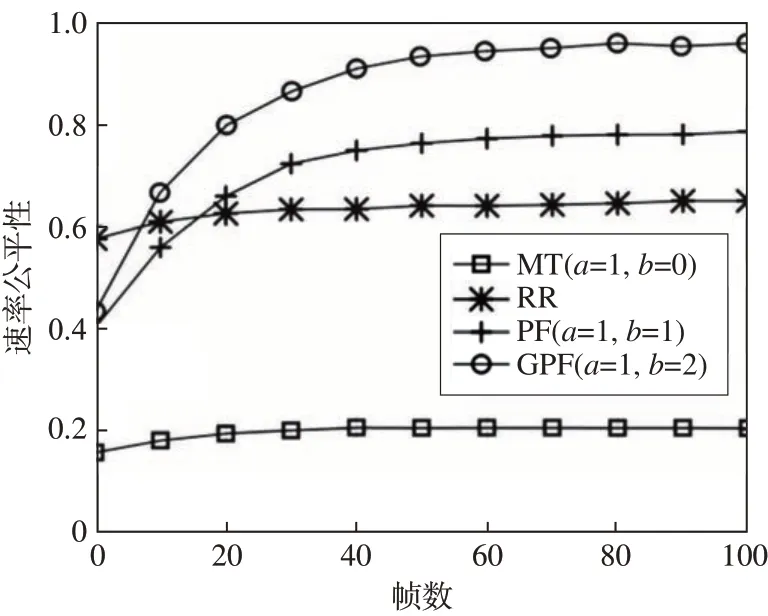
图12 短期速率公平性与帧数变化的关系Fig.12 Short-term rate fairness vs.frame rate variation
如图12 所示,a=1,b=2 时的短期速率公平性远高于a=1,b=0 时的情况,当帧数大于8 之后,甚至高于RR 调度算法,这也是GPF 算法减小a增大b时更多追求用户间速率公平性的结果。
3 半物理仿真测试
3.1 半物理仿真环境搭建
本文采用全链条半物理仿真架构,由28个组网通信终端配合计算机模拟软件完成通信节点数目为128 时的网络容量、网络速率、覆盖范围、网络延时、误码率等指标的仿真测试。128 个通信节点由28个组网通信终端(物理终端)和100个计算机软件模拟的通信节点(虚拟终端)组成。随机选取9个物理终端,其中1 个作为地面站主节点,8 个作为机载端主节点(簇首),地面站主节点与机载端主节点(簇首)构成星状网,机载端各节点构成网状网,形成如图13所示的1个星状网和8个网状网。
组网通信终端采用软件无线电设计思路。结合宽频段智能可控天线、多频段可控射频模块、可控中频模块,搭建统一硬件平台,实现硬件平台和软件平台的可重构。组网终端均工作在L 频率,其中星状网工作频率为1 300 MHz~1 312 MHz,8个网状网工作频率分布在1 316 MHz~1 408 MHz之间。
3.2 仿真测试流程及方法
无人机集群组网通信测试可分为地面联试测试、无线拉距试验和仿真演示测试,测试指标及方法如下:
1)传输距离:利用外场拉距试验及仿真演示验证试验方式设定节点终端样机的实际距离,通过调整衰减量至灵敏度阈值,计算链路余量从而推导最大可传输距离;演示阶段通过飞行试验验证覆盖范围;
2)网络速率:在传输速率测试软件上配置机载和地面各设备的IP 地址和端口号,测试软件设置以点对点或最大网络带宽8 Mbps 速率交互传输数据,使设备工作在满负荷状态。测试软件根据不同端口号进行数据接收,并自动记录发送以及接收数据量,测试时间1分钟,将测试结果进行记录计算网络速率;配置节点时隙分配,观察各端口号发射、接收数据量是否发生变化,从而确定传输速率是否动态变化;
3)用户容量:在不同位置架设28 个节点终端,同时利用仿真计算机软件模拟100个节点终端进行数据收发和交互,通过传输质量判定总节点数目128时能否正常工作;
4)误码率:开发误码率统计软件,模拟数据源收发伪随机数,在保证传输距离(信号衰减值设为最远距离)和传输速率前提下,长时间测试对比统计发射字节数和误码个数,实时计算误码率;
5)节点入网时间:开发网络接入时长测试软件,记录发送接入请求至数据正常传输时间;
6)网络传输时延:开发收发传输时延测试软件,记录从一节点发送到另一节点接收的时间差,计算网络传输时延。
3.3 测试结果分析
在搭建的半物理仿真试验环境基础上,按照测试流程和方法对组网通信的各项指标进行测试,结果表明:
1)地面站节点与机载端簇首点对点最大传输速率可达8 Mbps,机载端簇内点对点最大传输速率可达4 Mbps,网络速率达到预期设计指标要求;
2)单波束情况下通信网络最大传输距离可达100.24 km,四波束情况下最大作用距离56.92 km,通信网络覆盖范围远超预期设计指标;
3)机载终端网络接入时间为1.7 s,遥控信号和图像信号延时分别为51.8 ms、263 ms,网络延时指标优于预期设计指标;
4)通信网络误码率量级为10-7,优于预期设计指标。
综上所述,利用本文提出方法设计的组网通信终端,各项指标与集群通信需求相比均有较大余量,能够满足海域无人机集组网通信要求。
4 结论
本文针对海域无人机协同监测中,无人机之间及无人机与地面站之间的数据交互和互联互通需求,研究适合海域无人机集群网络扩展的路由协议和节点接入技术,使集群网络节点的增加不会对网络通信造成明显负担。在网络层提出了基于DSDV协议的分簇DSDV 协议,网络扩展性得到较大改善;在链路层采用资源预留机制,设计基于双向应答和冲突规避的资源按需动态分配和节点随遇接入协议,提升了网络拓扑变化灵活性;对于已入网节点,根据任务进程引入比例系数,提出了广义比例公平算法,通过设置不同的比例因子,灵活实现系统吞吐量与无人机通信速率公平性间不同程度的折中,以适用于不同监测环境和不同应用场景。通过仿真验证,利用本文提出方法设计的组网通信终端,各项指标与集群通信需求相比均有较大余量,能够满足海域无人机集组网通信要求。
