基于GIS 和无人机航摄测量技术的城市数字地形测量方法
2023-12-25朱英浩孟金龙杨平科
朱英浩 ,孟金龙 ,杨平科
(1.正元地理信息集团股份有限公司,北京101399;2.山东正元地球物理信息技术有限公司,山东 济南250101)
0 引言
城市数字地形测绘充分应用一系列的先进技术,获取点与点之间的坐标以及连接方式,合理描述地形图实体的空间位置及其形状,为都市建设的规划设计,建筑施工和经营管理提供数据支撑,包含城市建设管理监测,都市地形图测量绘制,各类专项版图的测量绘制,建设市政工程师的建设检测及其主要建筑物的变化观察等。但在测量城市数字地形的初始阶段,应适当考虑到测量过程中的各种干扰因素,如我国测量城市数字地形技术起步较晚,不够成熟,相关技术人才较少,因此需要相关技术人员的不懈奋斗,提升自身业务水平,利用城市数字地形测量收集详细准确的地理信息,进而精确地进行应用,提供有价值的参考意见。
文献[1] 针对城市住宅区大比例尺地形图测绘中的建筑密集,城市内部道路设计复杂,植物茂密等特点,采用三维激光扫描技术,获得数据量更大且精度更高的点云数据,将大部分外业采集时间转为内业处理,减轻了外业管理工作力度,大大提高了效率,但存在位置局限性,难采集较高建筑的数据的问题。文献[2] 利用视觉特征搭配、互联网云台PTZ 解算和场景与视频流的业务化搭配等方式,搭建实时监控网络视频与三维空间情景融入使用的三维空间GIS 管理系统,进一步实现网络视频与三维空间情景较好的融入,提升多路数字网络视频集成在三维空间情景中的展示性能,但视觉特征搭配的方式还有待进一步优化,以便其实现在建模纹理与实际情景出现差别时最好地甄选出正确对应点。为此,针对以上问题,本文基于GIS 和无人机航摄测量技术提出一种新式的城市数字地形测量方法。
本文在选择基于GIS 的无人机航线进行城市地形数据提取后,对城市数字地形数值进行模拟,得到地形数值计算参数和模拟分析,同时采用无人机航摄测量技术对城市数字地形进行测量,有效实现城市场景融合,对无人机设备采集的数据进行解算,构建和优化城市数字地形地图。
1 基于GIS 的无人机城市数字地形数据提取
1.1 无人机航线选择
在进行无人机飞行试验的初始阶段,需要要求无人机航线的正下方的城市地形尽可能平坦,减小地形对信号的遮挡程度,以达到考核影响因素的理想条件。由于城市各地方的地形情况各不相同,需在无人机的飞行区域选择起伏相对平缓的航线,根据已知的无人机的飞行坐标判断航线捷径及航线长度,并获取相应的约束条件参数,按照无人机的飞行特点和航线,同时采取最小均方差原则,集中处理无人机航线采集到的数据信息,最终获得最优化选择[3-4]。具体操作步骤如下:
步骤1: 明确无人机的飞行坐标。
步骤2: 根据相应的约束条件参数设定选择的航线,航线的拟合角度为5 °,按照碰撞检测原则对预测航线上的每一个飞行坐标进行碰撞检测判断预测航线是否可以保留,当两条航线的飞行坐标之间发生碰撞,则判定为危险航线,舍去[5-6]。
步骤3: 按照飞行航线的起伏平稳程度进行排序,逐次计算保留航线的均方差,根据最小均方差原则选择出最优航线。
1.2 城市地形数据提取
在完成无人机航线最优化选择后,获取无人机飞行航线上的各个飞行坐标,基于DEM 模型计算出等间距差值,设置飞行坐标的高度值为该坐标在城市地形上的投影高度,录入上述高度值,获得城市地形数据,得到城市地形高度曲线图,如图2 所示:
根据相对位置中的地面点对垂直方向的限制性较高的特点,区分地面点和飞行点的坐标,结合飞行坐标提取的数据特点对城市地形数据进行提取[7-8]。具体操作步骤如下:
步骤1: 利用单帧扫描技术扫描获得数字图像(a,b) ,其中a为需采集数据的行数,b为需采集数据的列数。每个数字图像都存在一个电子图像深度值c相对应。将数字图像的测距数据转变为数字图像的角度值d,在取得角度值d,基于Savitsky-Golay 滤波算法能减少噪声影响,设置飞行航线中角度低于45 °的飞行坐标为初始地面,控制飞行航线在进行广度优先算法后仍能保证飞行的平稳程度[9-10]。
步骤2: 根据地面坐标的特征,设飞行坐标对应的地面坐标为e,其余为飞行坐标; 设地面坐标的法向量为ne。
步骤3: 在飞行坐标中,根据邻域搜索方式计算每一个点的三个特征值(x,y,z) 与其对应的法向量(nx,ny,nz) ,设点云坐标的几何特征为:线性数L,面性数M,球性数Q,垂直度数N,可用下列公式表示:
孝长。孝敬长辈是中华民族传统美德之一,但数千年的宗法统治将“忠”“孝”混为一谈,倡导愚忠愚孝,使“孝”具有了一定的消极意义。村官选举中,受传统家长制潜意识影响,大姓长辈往往具有一定优势。但在农村青壮年大量外出务工经商,“空巢老人”已成为较普遍社会问题的背景下,提倡孝敬长辈,具有积极的社会意义,但要剔除传统孝道中的封建糟粕,按照现行法律法规,赋予“孝”最鲜活的现代内核。
2 城市数字地形数值模拟
2.1 地形数值计算参数
在进行城市数字地形数值模拟初始阶段需对地形数值进行计算,根据工程实际地质勘测报告及室内测试结果分析城市数字地形数值模拟过程中的地形数值,并在建立的城市素质地形模型中各方向的边界施加沿着各个固定方向的固定约束[11-12]。基于GIS 和无人机航线测量技术提取的城市地形数据更能反映城市地形的真实情况,提高计算的准确性。地形三维模型如图3 所示:
2.2 地形数值模拟分析
基于GIS 和无人机航摄测量技术提取的城市数字地形数据在重力作用下生成初始地应力场,根据初始竖向地应力成层状分布的原理,保证压应力与深度成正比,并获得在城市地形底部的最大值以及在城市地形表层的最小值。城市数字地形初始地应力场可用图4 表示:
在完成边坡生成初始地应力场后,将获取到的数据进行现阶段城市地质稳定性分析,并精确掌握城市地形位移最大区和城市地面的塑性区,绘制城市地形位移云图,同时分析城市地面塑性区情况,控制城市地形位移最大区和城市地面的塑性区主要集中城市中部地区,在其他范围内,无较大张拉和剪切损伤,城市数字地形总体稳定性较好[13-14]。
地形位移云图如图5 所示。构建城市地形最大剪应变增量云图如图6 所示。
分析并录入边坡速度矢量情况,发现在城市地形的中部有小部分剪应变增量较大,其他区域剪应变增量均较小,由此可得,城市边缘地区无较大运动速度,速度变化区主要分布在城市中部区域。
3 无人机航摄测量技术的城市数字地形测量
3.1 城市场景融合
根据测绘的方式获得的实际地理位置坐标,在三维空间情景中对真实互联网摄像头的方位和姿势加以仿真,即以网络摄像头方位为中心线构建空间直角坐标系,绕X、Y 和Z 轴转动形成翻滚角、俯视角和偏航角,一般用于使网络视频镜头画面水平,翻滚角默认为0 °,结合城市场景融合,有效利用图像特性的智能化搭配,将网上摄像头获得的实时监控视频图片与相同方位3D 场景各个角度的图片实现特征搭配,过滤出最优化匹配图片,得到虚拟摄像机在相应3D 场景中的视角参数,从而替换视频投影的真实场景参数的位姿。摄像机姿态参数如下图所示。
在城市数字地形的实际观测中,存在建筑稠密、城市道路设计繁杂,植物茂盛等复杂影响因素,其纹理保真度会影响到3D 模型的匹配结果。因此,当特定图像点完成提取后,必须通过特定图像点过滤去除干扰点。使用单应矩阵原则,匹配对照图一一对应的特定图像点,并根据对应图像点的最小距离过滤重复的特定图像点,获得精确的特定图像点并以此作为标准搭配最好的视觉角度及数字地形参数[15]。城市场景融合的自动化配套流程可用图8 表示。
3.2 无人机设备的采集数值计算
在实际城市数字地形测量过程中,需要解决无人机设备的采集值,设某个位置的云台测量的水平方位角为A和偏斜角为B后,并且设云台当前位置和转动后位置分别为C值C1、C2和D值D1、D2,再与初始方位的角度参数进行运营得到转动后云台测量的水平方位角A1和偏斜角B1,可用下列公式表示:
竖直视场角可用下列公式表示:
式中:L代表摄像机运行过程产生的水平宽度,H代表运行过程得到的水平高度。
3.3 城市场景融合的管理平台
城市数字地形地图的实景融合管理系统分为使用层、业务层、数据分析层和支撑层,采取普通的Web 架构实现网络平台构建,其中,使用层作为系统平台的管理部分,起到重要的作用,服务层需实现平台的核心技术,数据层需完成平台数据收集及分析,支撑层需研发平台的核心技术。使用人层分为4 个功能模块,即数据管理、查询、视频投射、场景操作,这4 个模块数据通过平台进行服务共享完成各自的目标,以达到优化城市数字地形地图的目的。
利用管理平台对数据进行挖掘,在数据挖掘前需要对数据特征值进行较为规范的归一化处理,提取各特征聚类集合关键属性数值,统一进行数据特征规范化处理,针对数据特征属性的相关性指标划分数据性能序列的特征值区间。使样本数据特征值稳定在某个固定数值区间条件内,进而能够进行离散变换:
式中:xk(t) 表示t时间节点的有限长的离散信息数据序列,k为离散系数。经过离散变换后显示的结果数据能够直观地分析出城市数字测绘位置,从而能够反向推断出数据所存在的聚类集合和节点序列,对地形数据进行挖掘,工作人员根据数据相关关系进行分析和处理,有利于后续工作的顺利进行。
4 实验研究
为了验证本文提出的基于GIS 和无人机航摄测量技术的城市数字地形测量方法,进行实验研究。实验过程的点位分布以及无人机运行轨迹如图9 所示。
根据检查点分布状况判断城市数字地形误差分布状态,得到的实验结果如下图10 所示:
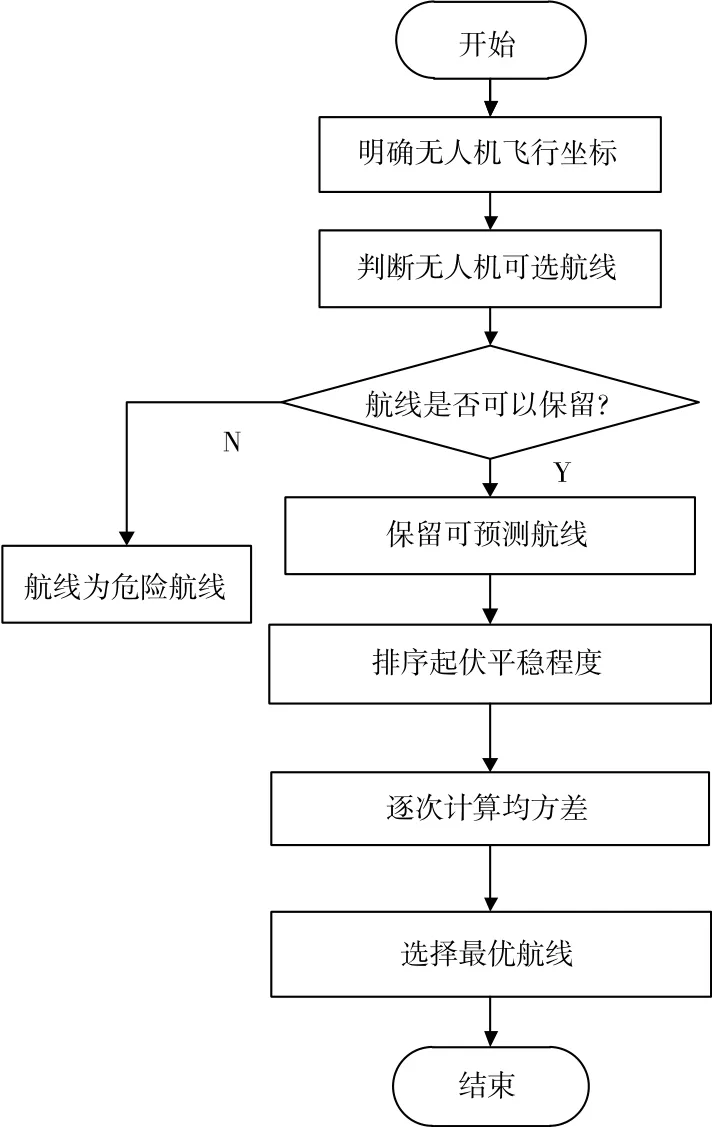
图1 无人机航线选择流程Fig.1 UAV route selection process
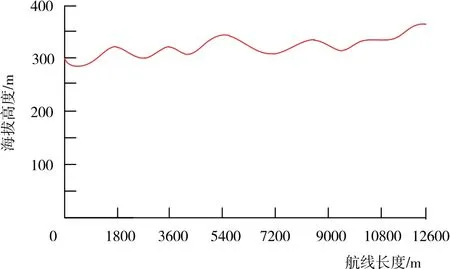
图2 城市地形高度曲线图Fig.2 Height curve of urban terrain
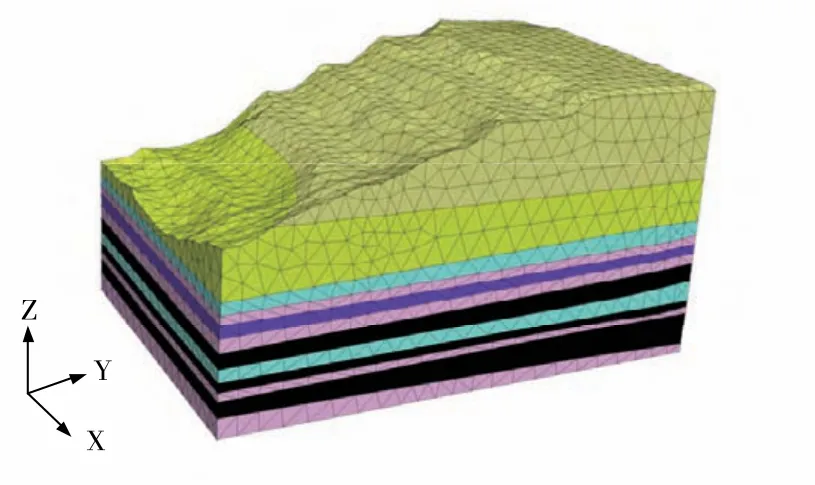
图3 地形三维模型Fig.3 Three-dimensional terrain model

图4 地形初始应力场Fig.4 Initial stress field of terrain
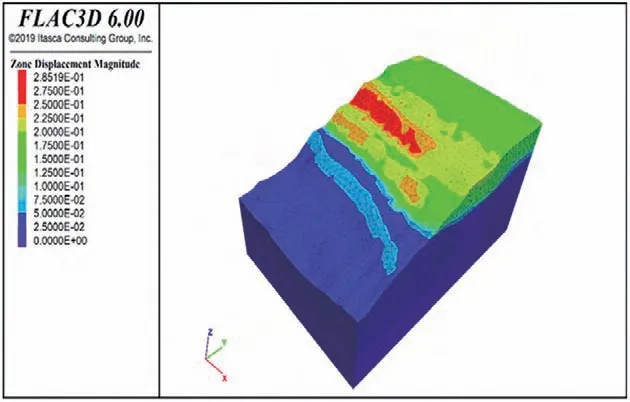
图5 地形位移云图Fig.5 Terrain displacement cloud map
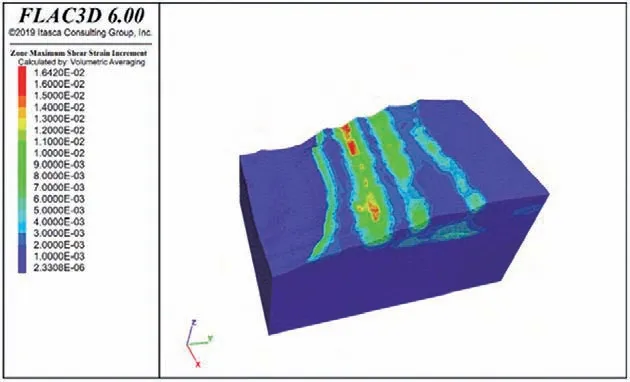
图6 最大剪应变增量云图Fig.6 Cloud image of maximum shear strain increment
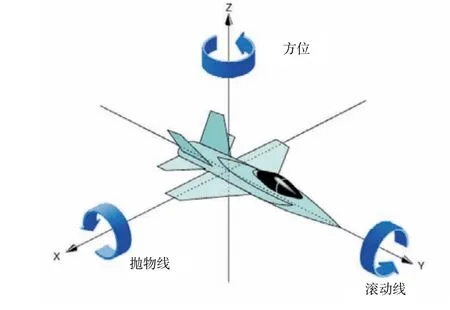
图7 摄像机姿态参数Fig.7 Camera attitude parameters

图8 城市场景融合自动化配套流程Fig.8 Automatic matching process of urban scene fusion
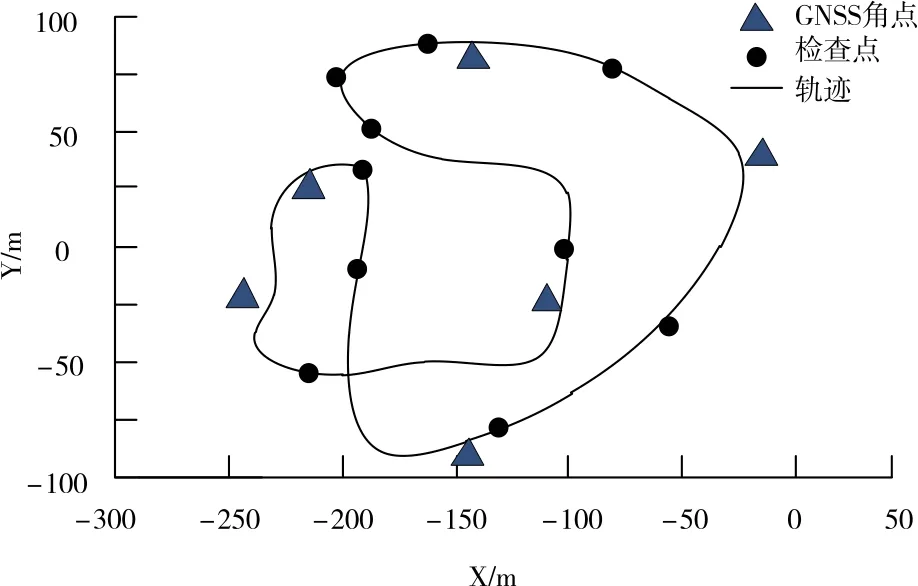
图10 误差分布状态Fig.10 Error distribution
根据上图可知,检查点存在随机误差,在不同的分布状态下,误差变化也不同,使用本文提出的测量方法能够很好地应对急剧出现的方位变化,减少误差残留,提高绘制的地形精度,从而更好地满足制图的要求。
本文针对城市地形的开放园区、公园和街区进一步分析无人机轨迹运行状态,选用传统的基于三维激光扫描的数字地形测量方法和基于城市测绘的SLAM 方法进行实验对比,得到的误差统计结果如下表所示。

表1 统计结果Table 1 Statistical results
根据上表可知,本文提出的基于GIS 和无人机航摄测量技术的城市数字地形测量方法能够通过量化处理对数字地形进行精准测量,无人机轨迹的绝对误差在0.25%以内,轨迹精度低于5 cm,坐标精度低于3 cm,具有极强的城市地形测量能力,更适用于实际工作中。
5 结论
本文深入分析基于GIS 和无人机航摄测量技术的城市数字地形测量方法,得出以下结论:
(1) 本文引入GIS 技术和无人机摄影技术研究了一种新的数字地形测量方法,确定无人机运行过程的轨迹,根据运行结果分析测量的城市地形,判断飞行坐标,实现参数调整,得到城市数字地形,本文的研究方法可以使城市数字地形与实际地形达到较高的相似度。
(2) 运用无人机航摄测量技术对城市数字地形测量,同时解算无人机设备的采集数值,能具有较高准确性地构建和优化城市数字地形地图。
综上所述,本文研究的城市数字地形测量方法虽效果优良,但在实际应用当中仍存在一些不足需继续改进: 在解算GIS 技术和无人机航摄测量技术采集到的数据时,平台后方将持续发出请求,延长投射时间。