一种高兼容样本管转移装置的设计与应用
2023-12-21牛文明姜宗品牛杰赵鹏王超
牛文明,姜宗品,牛杰,赵鹏,王超
安图实验仪器(郑州)有限公司 (河南郑州 450016)
随着全自动体外诊断设备的普及[1],样本的自动化分析低温存储需求不断增加。为适用多规格多场景的样本管低温存储,对配套的样本管转移装置提出了新的需求。自动化分析低温存储通常使用在生化分析仪、血液分析仪、尿液分析仪等精密仪器及实验室流水线分析系统的末端。样本管进入低温存储过程中,需依靠样本管转移装置进行转移。样本管转移装置先通过夹爪夹取样本管,再通过旋转机构带动夹爪转动,最后通过升降机构控制夹爪的升降实现对样本管的转移。现有的样本管转移装置仅可抓取固定规格的样本管,通用性、兼容性较差。高通用性和兼容性的样本管转移装置应可兼容不同直径、长度、管帽及封膜的样本管,且能够实现升降(含防跌落)、抓取和换向转移的功能[2]。基于此,本研究设计了一种可自动转移的样本管转移装置,可实现多种规格样本管在不同空间转移位置地对接,现报道如下。
1 总体设计
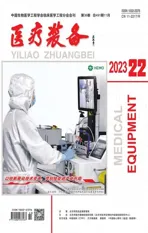
该装置主要组成部分包括抓取机构、升降机构、旋转机构[3-5],可实现多种规格样本管在运行空间内任意位置的转移,并同时兼容多种方向和多种位置的轨道对接。
抓取机构利用步进减速电机、凸轮和压缩弹簧完成样本管的抓取与放开。其中,计数到位传感器实现到位情况的确认和对转移样本管进行计数的功能。
升降机构(含防跌落)利用步进电机、同步带和直线导轨实现样本管的上下运动。其中,防跌落组件通过电磁铁、连杆机构和棘轮机构实现对整个装置的断电保护。
旋转机构采用步进电机直连实现样本管不同位置的旋转转移。其中,旋转绕线对装置中的电机及传感器的走线进行固定,在旋转机构进行取放旋转作业时,旋转绕线可跟随机构进行正反向的同步运动,正反向均可运行90°,其固定弹簧为特殊定制弹簧,可实现在线束重力影响下控制垂直方向变形量在10%以内,电机及传感器线束固定整齐,运动跟随性好。通过旋转绕线与拖链,保证线束在装置进行升降及旋转运动过程中良好的同步性且不会发生缠绕和磨损,提高装置的运行寿命[6-8]。
该装置的总体设计见图1。
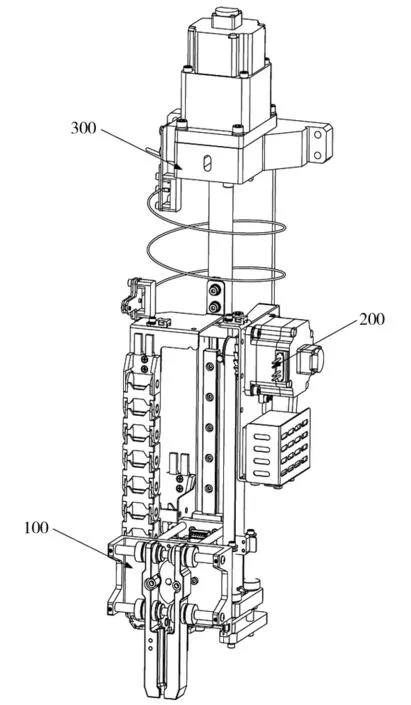
图1 样本管转移装置总体设计
2 硬件材料与结构设计
该装置配套的固定螺钉和销钉等紧固件选用SUS304 不锈钢。主要结构的硬件材料与结构设计如下。
2.1 抓取机构
抓取机构的标准件包括抓取电机、到位传感器、压缩弹簧、轴承和直线轴承。其中,压缩弹簧、轴承和直线轴承的材料为不锈钢。机加件包括安装板、抓手指和凸轮。其中,安装板、抓手指的材料为A6061 铝合金,凸轮的材料为SUS304 不锈钢。
抓取机构的抓取电机固定在安装板上并与凸轮连接,凸轮与轴承滑动配合。推动抓手指沿导向轴方向在直线轴承与导向轴的配合下做直线运动,此时压缩弹簧被压缩,抓取机构张开,触发到位传感器,之后移动到待抓取位。抓取电机继续旋转,抓手指在压缩弹簧的复位力作用下沿导向轴方向在直线轴承与导向轴的配合下完成抓取机构闭合动作,完成抓取作业。此种滑动配合阻力小、运行稳定、无噪声且寿命长。压缩弹簧的复位力可根据抓取物类型进行调节,通用性强,且力度适宜,不易损伤被抓取物。抓取机构的结构设计见图2。
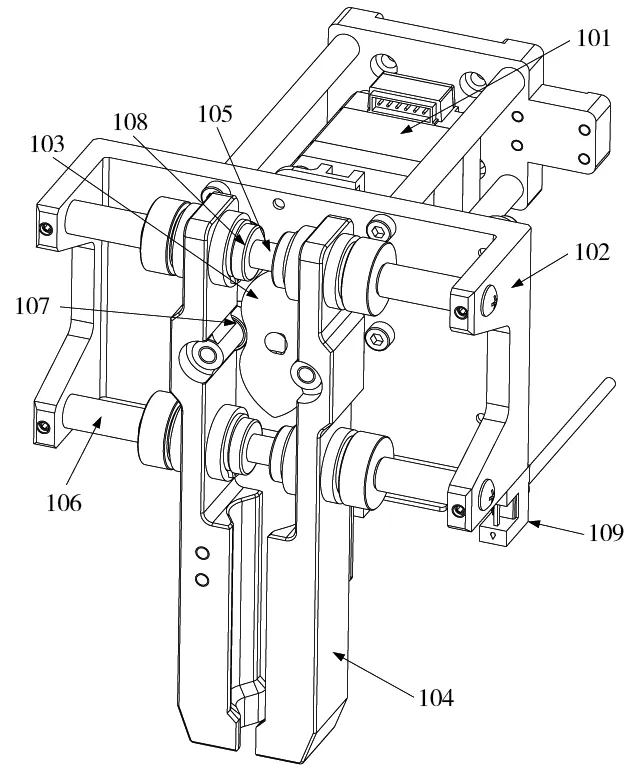
图2 抓取机构的结构设计
2.2 升降机构
升降机构标准件包括升降电机、到位传感器、防跌落组件、直线导轨、压缩弹簧、直线轴承、主动轮、从动轮、同步齿形带和导向轴。其中,直线导轨、压缩弹簧、直线轴承和导向轴的材料为不锈钢,主动轮和从动轮的材料为铝合金。机加件包括升降滑块和轴承座,材料均为A6061 铝合金。钣金件即电机安装板,材料为SUS304 不锈钢。
升降机构的升降电机固定在电机安装板上,升降电机旋转带动主动轮,将动力通过同步齿形带及从动轮传递给升降滑块。升降滑块沿直线导轨做升降往复运动,完成升降动作。其中,同步齿形带由固定在轴承座上的直线轴承,在压缩弹簧的作用下沿导向轴进行自张紧,可自适应皮带张力,防跌落组件可实现急停断电防跌落功能。升降机构的结构设计见图3。
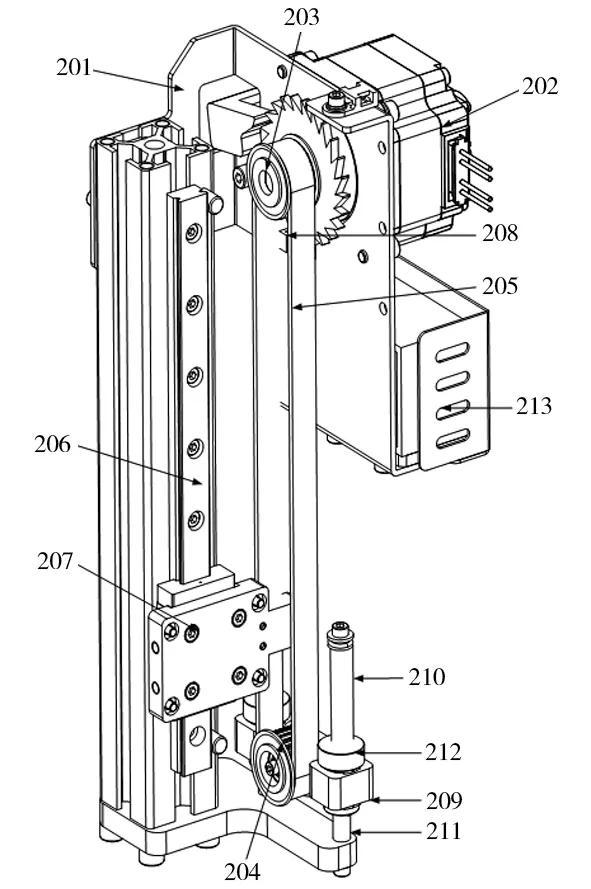
图3 升降机构的结构设计
2.3 旋转机构
旋转机构的标准件包括旋转电机、旋转原点传感器和拖链。机加件包括电机固定座、转动连接轴。其中,电机固定座的材料为A6061 铝合金,转动连接轴的材料为SUS304 不锈钢。型材包括支撑柱和旋转绕线件,材料均为SUS304 不锈钢。
旋转机构的旋转电机固定在电机固定座上,电机与转动连接轴直连,电机固定座中安装有2 个轴承,起到支撑和传动辅助作用。旋转电机转动,带动旋转轴绕转动连接轴做圆周往复运动,旋转绕线件用于支撑旋转机构上的线束。旋转机构的绕线方式简单化,但能够保证线束的运转同步性并避免线束磨损。旋转机构的结构设计见图4。
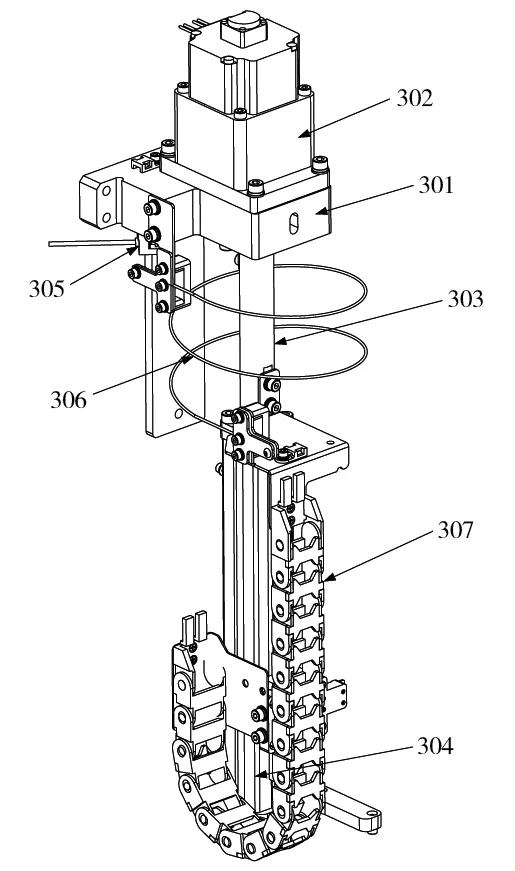
图4 旋转机构的结构设计
3 软件逻辑设计
该装置的软件工作逻辑流程见图5。
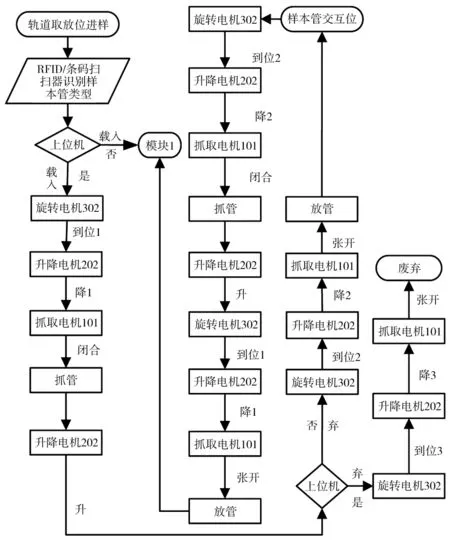
图5 样本管转移装置的软件工作逻辑流程
装置完成初始化运行后,当线体上有样本管传送至待抓管位置时,轨道处首先进行射频识别(radio frequency identification,RFID)与条码扫描器识别,辨别样本管的规格及带帽状态。识别后根据样本管规格及状态,旋转电机302 启动,通过旋转连接轴及支撑柱带动升降机构,抓取机构旋转至样本管抓取位上方。到达位置后升降电机202 启动,通过主动轮、从动轮及同步齿形带传动,带动抓取机构下降至适合各规格样本管的抓取高度。到位后抓取电机101 启动,带动凸轮旋转,凸轮与轴承滚动传动,抓手指在压缩弹簧的复位力作用下通过导向轴与直线轴承导向向内直线运动,完成抓管动作。抓管完成后,升降电机202 启动,通过主动轮、从动轮及同步齿形带传动,带动抓取机构上升。上升到位后,旋转电机302 启动,通过旋转连接轴及支撑柱带动升降机构,抓取机构旋转至样本管放置位上方。然后升降电机202 启动,通过主动轮、从动轮及同步齿形带传动,带动抓取机构下降至放置位。抓取电机101 启动,带动凸轮旋转,凸轮与轴承滚动传动,抓手指在凸轮的推动下通过导向轴与直线轴承的导向向外直线运动,完成放管动作后升降机构复位,旋转机构复位,样本管的转移动作完成。
该装置的升降机构由于空间受限无法使用刹车电机。为避免意外断电发生砸管现象,设计了防跌落组件,通过电磁铁及棘轮机构实现防跌落功能。
4 旋转机构的运动力学分析
该装置的旋转机构运行次数较多,速度最快,负载最大,发生故障的概率最高。现以旋转机构为例,进行运动力学分析,并确定旋转电机302 的参数。
4.1 转动惯量
电机转动惯量是反应电机转动能力的重要参数,代表电机的载荷能力。旋转机构的转动惯量计算公式如下:
式中,JL为总负载惯量(kg·m2),Ja为机械臂转动惯量(kg·m2),ig为减速比,m为负载质量(kg),A为负载纵向距离(mm),B为负载横向距离(mm),e为负载离中心轴的距离(mm),Jg为传动机构的转动惯量(kg·m2),mg1为一次侧质量(kg),Dg1为一次侧直径(mm),mg2为二次侧质量(kg),Dg2为二次侧直径(mm),mg为皮带质量(kg)。
已知m=2 kg,A=122 mm,B=30 mm,e=61 mm,可计算负载总转动惯量JL=100.727×10-4kg·m2。
4.2 旋转电机302 的参数选择及校核
根据转动惯量及设计需求,确定旋转电机302 的参数(表1)并校核惯性比及安全系数[9]。
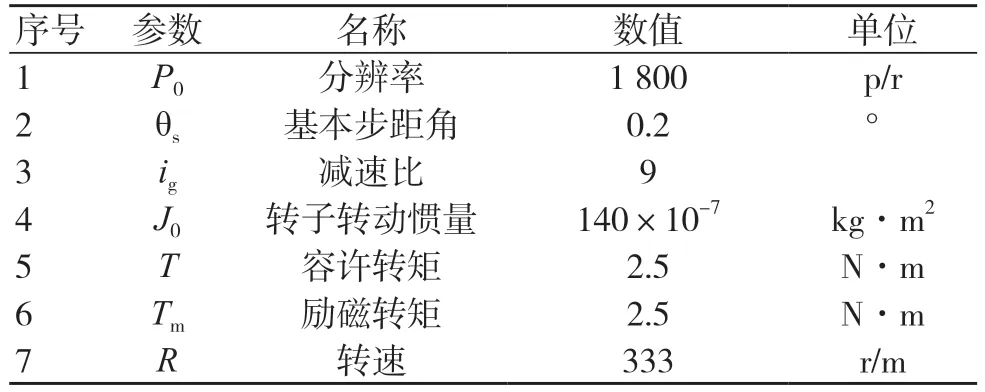
表1 旋转电机302 的参数
惯性比的计算公式为:
式中,J0为转子转动惯量。
由负载总惯量JL及电机参数可求出β=8.88,满足要求。
安全系数的计算公式为:

以上公式中,S为运行安全系数,Tm为运行时必要转矩(N·m),T为所需转矩,Te为负载转矩(N·m),Ta为运行时加速转矩(N·m),θs为基本步距角,f为运行脉冲频率(Hz),t1为加减速时间(s),f2为运行脉冲频率,A为移动脉冲数(pulse),t0为移动时间(s),λ为移动量(°)。
已知λ=180°,t0=0.5 s,t1=0.2 s,可得出运行安全系数S=4.26,满足机械设计行业对安全系数的常规需求(>2)。
5 实际应用
该装置用于实验室低温存储模块样本的交互。当将直径为13、16 mm,高度为75、100 mm 的样本管送入低温存储模块中,或将低温存储模块中的样本管需要复测时,可完成样本管从对接轨道和低温存储的交互,以及将已完成检测需废弃的样本管进行废弃载出和转移。实际应用中,该装置实现了624 万次(等效10 年疲劳)的疲劳测试,故障率为0,实物图见图6。

图6 样本管转移装置实物图
该装置通过样机应用验证,可有效解决已有设备的结构复杂、占用空间较大和兼容性差等问题,其兼容性表现较好,能够运送不同管径、高度和封管方式的样本管。本研究设计装置与已有设备的比较见表2。
6 结论
本研究通过对工作原理、硬件材料与结构设计和软件逻辑设计分析,构建出一种高兼容性样本管转移装置的整体结构和布局,并通过对旋转机构的运动力学计算分析,确认电机的选型,为该装置提供了理论基础。经低温储存模块对接应用及疲劳测试,进一步验证了该装置的可靠性。结果表明,该装置可在运动能达到范围内的任意空间位置进行抓管和放管,同时兼容各种规格和带帽封膜状态的样本管。该装置为实验室低温存储模块样本的转移结构设计提供了参考,具备结构简单、占用空间较小和通用性强的特点转移。