考虑RNA运行作用的近海风电结构主动质量阻尼器振动控制研究
2023-12-18白久林李晨辉王宇航
白久林, 李晨辉, 王宇航
(1.重庆大学 山地城镇建设与新技术教育部重点实验室,重庆 400045;2.重庆大学 土木工程学院,重庆 400045; 3.西北电力设计院有限公司,西安 710075)
发展风电产业是我国“十四五”期间实现能源低碳转型并推动形成绿色发展方式的重要途径。近年来,为了达成更高的新能源供能比例,我国风电装机规模不断扩大,塔架不断升高,风轮尺寸不断增加。然而,如此迅猛的发展中存在两个重要问题:① 风电市场扩张迅速,对风电项目的开发“降本”提出了更高的要求,开发新型的高性能风电结构体系是实现“降本”目标的有效选择。② 海上风电塔支撑结构常采用单桩基础和钢塔筒,是典型的高柔结构,其基准周期长,在环境荷载与风轮-机舱组件(rotor-nacelle assembly, RNA)的运行作用激励下,振动问题突出,倒塔事故频发[1-2],风电结构体系“增效”需求迫切。
质量阻尼器是结构振动控制的常用手段,主要包括被动、半主动、主动三种形式,其通过附加质量产生的惯性作用为主体结构提供相对反向的控制力,同时振动能量由阻尼元件逐渐耗散。采用质量阻尼器的有益效果体现为:① 可降低风电结构内力,使塔架更容易满足设计要求,节省塔筒材料、运输、施工等建设成本;② 可缓解结构的疲劳损伤,延长使用年限。因此,质量阻尼器可解决“降本”与“增效”两方面问题,为电能输出提供保障,具有实际意义[3-4]。
目前,学者们采用不同的质量阻尼器方案对风电塔进行了控制研究。在被动阻尼器方面,Murtagh等[5]考虑塔架和旋转叶片的自振特性,建立了风电塔耦合模型,初步探究了调谐质量阻尼器(tuned mass damper, TMD)对风电塔的风致振动控制。Lackner等[6]采用自主开发的FAST-SC平台,研究了TMD对不同基础形式风电结构的控制作用。Li等[7]研究了摆式TMD对台风作用下风电结构动力响应的控制作用。Stewart等[8-9]使用FAST-SC平台研究了风浪方向错位下TMD对海上风电结构的控制效果。Sun等[10]考虑风浪错位和涡流致振,提出一种三维摆式调谐质量阻尼器(3D-PTMD)来抑制近海风电结构多方向的动力响应,并先后研究了3D-PTMD在疲劳损伤控制[11]及冰激振动控制[12]方面的表现。李万润等[13]提出一种双向TMD,开展了风电结构风致响应减振的研究。在半主动阻尼器的研究中,线性二次型调节(linear quadratic regulator, LQR)算法是一种有效的控制策略:Sarkar等[14-15]与Rezaee等[16]分别基于LQR算法考察了半主动调谐液柱阻尼器(SA-TLCD)与半主动调谐质量阻尼器(SA-TMD)对风电塔动力响应的控制作用。
白久林等[17-18]的研究结果表明,RNA运行作用下风电塔顶前后向响应含量复杂;在气动阻尼的影响下塔架一阶振动受到限制。然而,在已有研究中,风电结构普遍被考虑为传统的高耸结构针对塔架一阶频率进行质量阻尼器的调谐与设计。Ghassempour等[19]、Chen等[20-21]与Xie等[22]分别通过不同的耦合模型(GH Bladed,FAST,Simpack)得出了类似的结论:风机运行状态下,针对塔架一阶频率调谐的TMD对前后向响应的控制效果会受到负面影响。考虑到风电塔前后向为主要受载向,塔顶加速度是工程中的重要监测指标,加速度超限可能会导致风机故障甚至局部脱网,因此发展一种控制效率更高的阻尼器具有重要的应用价值。
与TMD不同,主动质量阻尼器(active mass damper, AMD)[23]结构体系,如图1所示。通过主动的驱动元件直接与受控结构相连,通过一定反馈算法实时输出驱动力,具有无需调谐的特点,可更好地适应风电结构复杂的动力特性,其对风电结构的控制研究目前几乎空白。本文基于LQR算法,探究了考虑RNA运行作用下,AMD对风电结构前后向响应的控制作用,从时域和频域分别考察了其减振性能与控制特点,旨在为风电结构减振提供参考,为风电塔的结构安全与供能稳定提供支撑与保障。
1 近海风电结构分析模型
1.1 NREL 5 MW 单桩风电塔
美国可再生能源实验室(National Renewable Energy Laboratory, NREL) 5 MW风机模型[24]是目前最常用的风机模型,其开发综合了Multibrid M5000、REpower 5M等实际风机数据,可真实地反应风机各项动力特性,部分数据如表1所示。本文以最常见的单桩风电塔为对象开展系列分析,如图2所示。
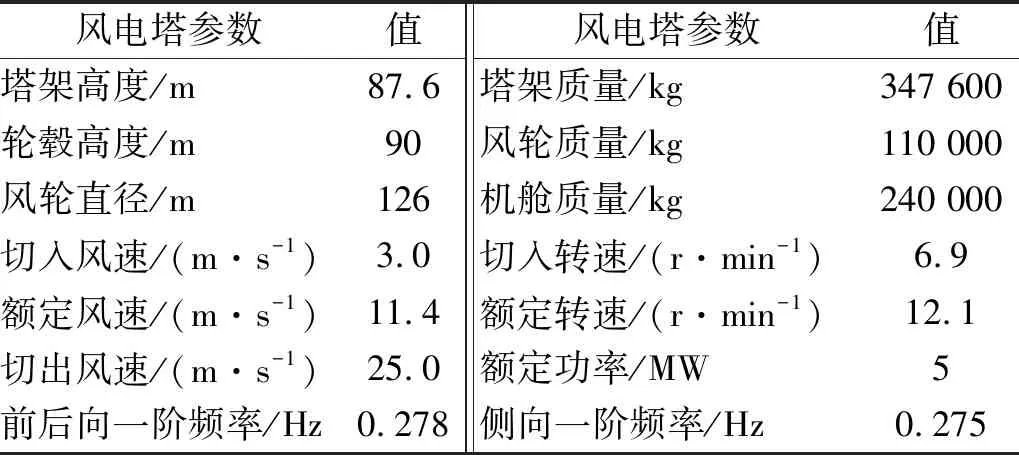
表1 NREL 5 MW单桩风电塔参数

图2 NREL 5 MW 单桩风电塔
风电结构的显著特点在于塔筒顶部用于捕获风能的RNA。在风力发电的过程中,为了风能的最大利用,风机常采用变速-变桨控制策略进行发电量的调节。根据贝兹理论[25],风轮捕获功率P的表达式为
(1)
式中:ρa为空气密度,取1.225 kg/m3;v为风速;R为风轮半径;功率系数Cp为尖速比λ与桨距角β的函数。其中尖速比λ为叶片尖端线速度(ωr为角速度)与风速v的比值
(2)
可知,固定风速时,功率系数Cp决定了风轮捕获功率。实际运行中,Cp取决于风轮转速与桨距角的实时调节:当实时风速处于切入风速与额定风速之间时,叶片桨距角维持0°,通过变速控制使风机始终运行在最佳尖速比λopt附近,实现功率系数Cp最大化;当风速超过额定风速时,通过桨距角调节(变桨)控制功率系数Cp,从而使发电机以额定功率稳定输出。
对于NREL 5 MW风机,其运行过程分为三种状态:风速在3.0~11.4 m/s为切入状态,在11.4~25.0 m/s为额定状态,超过25.0 m/s为停机状态,如图3所示。

图3 变速-变桨控制策略
1.2 单自由度模型
由于细长、柔性的风电塔在风荷载作用下弯曲变形形式单一,振动位移沿塔高的分布基本符合一阶振型,可在考虑RNA运行作用对体系参数影响的基础上,将风电塔简化为单自由度(single degree of freedom, SDOF)运动模型[26-28],如图4所示。
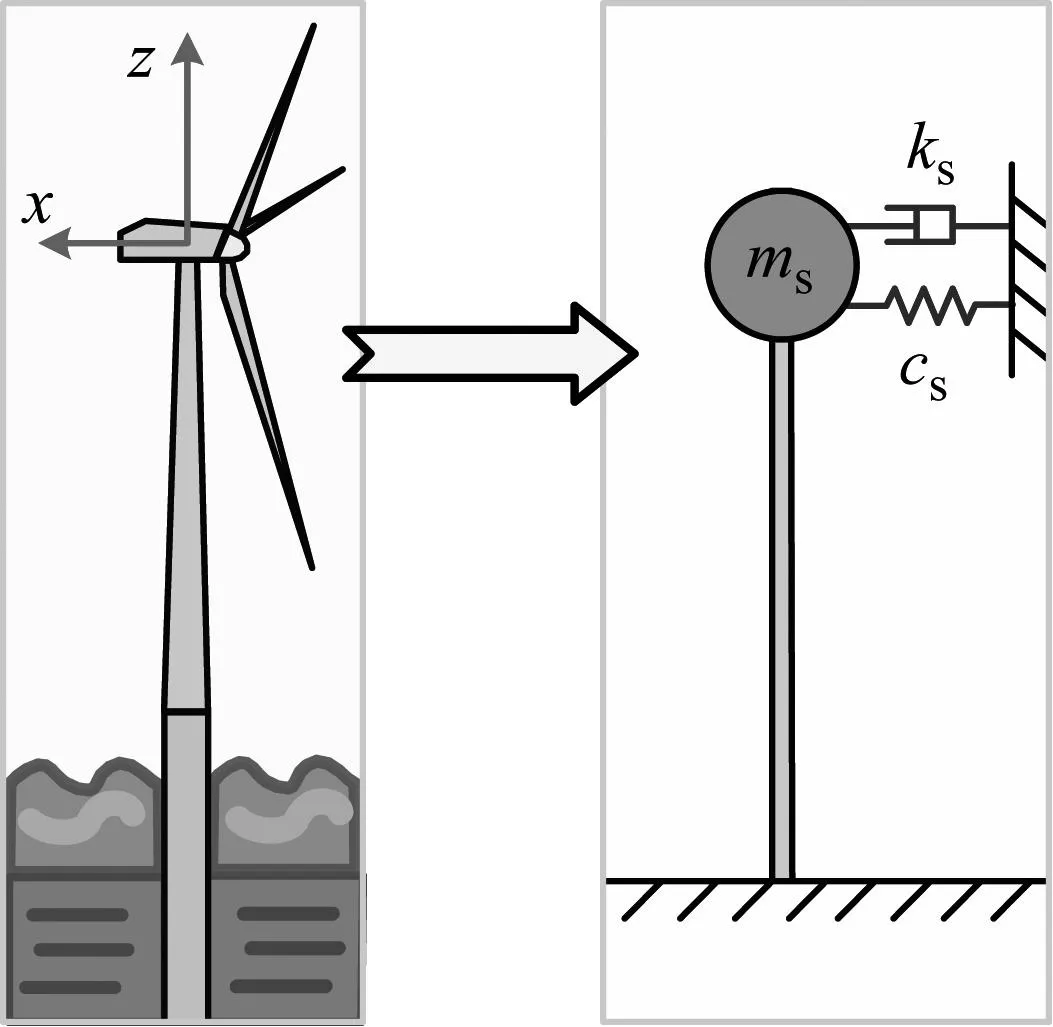
图4 风电结构单自由度模型示意图
风电塔SDOF体系的各项参数需考虑RNA运行作用的影响,结合图3,选取两特定风速条件7 m/s (切入状态)与18 m/s (额定状态),使用OpenFAST软件[29]分别计算不同状态下耦合模型前后向自由衰减曲线,如图5所示。质量、频率及阻尼比可具体考虑为:

图5 OpenFAST衰减测试
(1) 质量:本文聚焦塔顶前后向加速度的控制方案,因此将塔叶片和机舱简化为集中质量,总计350 000 kg;塔筒作为支撑结构,主要提供体系整体刚度与自身阻尼,其质量在重点研究塔顶响应的等效模型中可以忽略。
(2) 频率:由于塔架在环境荷载下运动行为主要受结构一阶振型控制,因此等效模型仅考虑前后向一阶模态。对应主频率根据图5的衰减曲线相邻振峰间距可计算前后向一阶频率fs=0.278 Hz,与表1一致。
(3) 阻尼:风电塔前后向阻尼不可采用塔架结构阻尼 (约0.005~0.010) ,而应考虑包括风轮旋转产生气动阻尼的整体阻尼,通过动力衰减法计算切入状态整体阻尼为0.059,额定状态整体阻尼为0.076,如图5所示。
1.3 气动荷载
SDOF体系需要输入RNA运行作用下的气动荷载。对于塔架前后向,主要考虑风轮旋转时的气动推力Taero,由风场条件、风机尺寸、风轮转速、桨距角等参量共同决定。
风况的考虑包含平均风与湍流风。平均风速可采用指数律风剖面模型以考虑风轮表面的风剪切效应,表示为
(3)
式中:Uz为不同高度z处平均风速;Uhub为轮毂高度zhub=90 m处的平均风速;α为粗糙度指数,IEC-61400-1[30]建议取0.14。
湍流风采用Von Karman谱进行计算,其中顺风向湍流功率谱表示为
(4)
式中:σu为顺风向的湍流强度;f为风湍流频率;L为积分尺度参数。L可取为
L=2.45·min(60 m,zhub)
(5)
根据IEC-61400-1选择B级湍流特性及正常湍流模型(normal turbulence model, NTM)进行计算。NTM中顺风向风速分量的标准差代表值σu表达式为
σu=I15(0.75Uhub+b)
(6)
式中:I15为15 m/s风速时湍流强度的期望值,按照B级湍流特性取0.14;b=5.6 m/s。
根据IEC-61400-1,风场的空间相干性考虑为
(7)
式中:r为风场中两点i与j之间的距离;a为衰减系数,取12;b为偏移系数,可按下式取值
(8)
基于式(3)~式(8),本文采用Turbsim[31]模拟风轮平面的湍流风场。以轮毂为中心,采用覆盖风轮扫掠面积的风速网格进行风场的模拟,网格上设有31×31个风速点,覆盖区域尺寸为145 m×145 m,如图6所示。

图6 叶素翼型气动矢量图
本文聚焦的塔顶前后向响应主要来自风轮的气动推力Taero,可通过叶素动量理论求取。计算过程中,分别用动量方程和叶素理论建立气动推力Taero的表达式,使二者相等来进行风速诱导因子参数的迭代计算,最后将诱导因子带回叶素理论方程得到计算结果,其中气动推力Taero表达式分别为
(9)
式中:B为叶片数;ω为叶片旋转角速度;c为弦长;φ为入流角;r为叶素控制体的半径;v0为风轮上游无穷远处风速;a和a′分别为轴向和切向诱导因子;Cn和Ct分别为叶素翼型的法向力系数和切向力系数。
可以看出,气动荷载的计算与叶片的旋转速度ω和桨距角β(入流角φ与风速局部攻角α的差,见图6)密切相关,即风电结构动力响应会受到变速、变桨控制的直接影响。本文重点研究前后向响应的控制,因此仅介绍气动推力Taero。本文在计算气动推力Taero过程中考虑了普朗特叶尖损失修正、葛朗沃特修正,具体可参考文献[25]。
考虑两特定风速条件7 m/s(切入状态)与18 m/s(额定状态),采用OpenFAST软件中的AeroDyn模块[32]分别计算切入状态与额定状态下的气动推力Taero,如图7与图8所示。
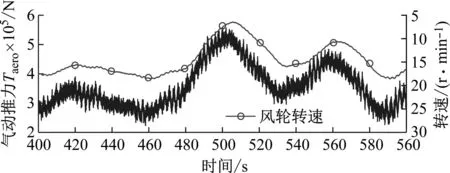
(a) 气动推力时程

(a) 气动推力时程
可以看出,切入状态下变速控制发挥作用,气动推力Taero受到风轮转速的显著影响;而额定状态下以变桨控制为主,气动推力Taero与桨距角的动态趋势保持一致。另外,由于工作状态的不同,不同风速下气动推力Taero时程曲线的波动方式存在差异,这会导致不同的结构动力响应。从图7(b)、图8(b)中可知,3P激励是气动推力Taero的重要组成部分。由于空气动力产生的超低频荷载会使塔顶发生缓慢的运动;而3P的频率较高,会显著影响塔顶加速度。
1.4 对比结果
在相同的气动推力Taero的条件下,单自由度模型与OpenFAST耦合模型的塔顶加速度频谱图对比如图9所示。从图9可知,二者的频谱特征吻合度高,塔架前后向一阶频峰(后简称为一阶峰)、风轮旋转3P频峰(后简称为3P峰)的频谱特征均可对应,等效模型可以较好地反映塔顶前后向响应的频域特性。

(a)
然而,SDOF模型的3P频峰偏低,这是由于集中质量忽略了柔性叶片的动力放大作用。考虑到需要重点关注的主频峰与3P峰在等效模型中(尤其是切入状态)可以有较好的体现,不会影响振动控制参数研究的规律,故此等效模型可以进行下一步应用。需要说明的是,由于气动阻尼由风轮旋转产生,SDOF模型无法精细化考虑风轮的运动特性,阻尼比未按照衰减测试结果严格取值,取0.04~0.05之间对应效果最佳。
2 主动质量阻尼器
2.1 控制原理
主动质量阻尼器(active mass damper, AMD)的振动控制应用已经较为成熟,由TMD进一步发展而来,同样依靠质量体的惯性运动提供控制力。二者相比,TMD的控制性能受到连接刚度(调谐)的限制,减振频带较窄。而AMD的特点在于没有刚度、阻尼元件,不依靠调谐对结构施加相对反向的控制力,直接通过作动器将质量与被控结构连为一体,根据响应反馈进行实时控制。
AMD系统内一般设有传感器、智能算法与作动器,通过传感器系统测量结构的干扰和(或)反应,反馈至算法系统并进行最优控制力计算,以此驱动作动器并推动AMD进行惯性质量运动,最终达到减振控制的目的。在风电结构的振动控制领域中,AMD的相关研究几乎处于空白,考虑到风电结构响应较复杂的频域特征,无需调谐的AMD具有更高的应用价值。
进一步,受阻尼器控制的塔顶集中质量运动方程表示为
(10)
式中:Taero为风轮表面的气动荷载;FDamp为阻尼器对结构提供的控制力;ms、cs、ks分别代表结构的整体质量、阻尼系数及刚度系数,可表示为
(11)
cs=2msωsξs
(12)
式中:fs为风电塔的一阶频率;ξs为风电塔的整体阻尼比。
2.2 LQR控制算法
TMD的参数确定一般采用定点理论[33]根据结构一阶频率确定,而AMD控制力需在一定智能算法和反馈机制的基础上进行实时计算。
LQR是工程界常用的控制理论之一,其对象是现代控制理论中以状态空间形式给出的线性系统,而目标函数为对象状态和控制输入的二次型函数。LQR最优设计的原理是设计出状态反馈控制器G使得二次型目标函数J取最小值。状态反馈控制器G又称为反馈增益矩阵,由权矩阵Q和R决定,故Q、R矩阵的选择是使用LQR进行系统控制的关键。
根据式(10),使用状态空间方程描述风电塔-AMD等效模型以方便建模及观测,受控系统可表示为
(13)
(14)
(15)
(16)
系统的二次型性能指标J表示为

(17)
式中:Q为半正定对称权矩阵;R为正定对称权矩阵,二者用以平衡系统响应与控制力输入的权重。
为使性能指标J最小,需设计反馈增益矩阵G以获得最优驱动力
U=-GZ
(18)
式中,反馈增益矩阵G可进一步表示为
G=R-1BTP
(19)
式中,P为莱卡提(Riccati)矩阵函数,是Riccati方程的解
PA+ATP-PBR-1BTP+Q=0
(20)
由此推算反馈增益矩阵G,将式(18)代入式(13),结构-AMD控制系统的状态方程可进一步表示为
(21)
可知,对比TMD,LQR控制相当于通过反馈增益矩阵G改变系统矩阵A,此时(A-BG)为等效系统矩阵。另外可知,反馈增益矩阵G只由系统自身性质(A,B,Q,R)决定,不受外荷载DT的影响。
在现代控制理论中,权矩阵Q与R通常需要考虑状态空间方程的特点,根据经验进行取值;对于本文的控制问题来说,权矩阵Q与R通常取为
(22)
R=β2
(23)
式中:K与M分别为AMD-结构体系的刚度矩阵与质量矩阵;β1与β2分别为权系数,需要根据实际结构进行确定。一般来说,Q越大,受控结构反应越小,控制效果越好;R越大,则控制输入越小,控制效果越差。
进一步地,根据上述表达式采用SIMULINK平台建立AMD-风电塔体系模型,系统矩阵A、驱动力输入矩阵B和荷载输入矩阵D分别在MATLAB的workspace中定义,反馈增益矩阵G通过lqr函数进行求取,并通过sim函数赋值给SIMULINK模型。
3 减振分析
对AMD进行参数设计并设计一组相同质量比μ=0.05[34-35]的TMD作为对照组以探究AMD的减振性能与控制特点。其中,质量比μ为阻尼器质量md与机舱、叶片等风机顶部集中质量ms的比值;AMD的权系数为经验取值,TMD的频率比γ及阻尼比ξd通过定点理论计算得出,设计参数如表2所示。
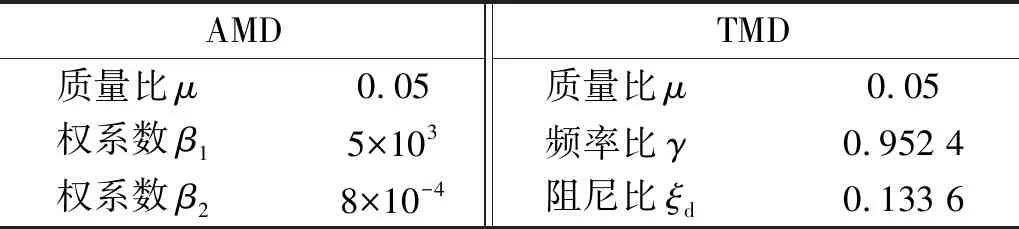
表2 阻尼器参数
3.1 控制效果
综合以上模型与荷载理论,进行AMD减振控制计算,切入与额定状态下的时程曲线分别如图10与图11所示。从图10和11可知,RNA运行作用下,AMD可以抑制风电塔顶加速度响应;振动响应的幅度与峰值都获得了较好地控制,AMD的控制作用得到了验证。
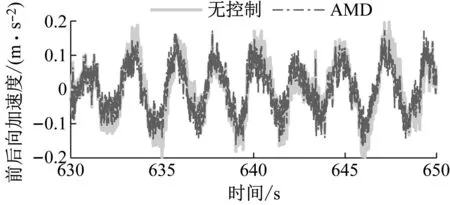
图10 切入状态加速度响应对比

图11 额定状态加速度响应时程对比
3.2 控制对比
通过对比AMD与TMD的减振响应,可从时域和频域两方面考察二者对于加速度响应的控制作用。为方便量化二者对时域响应的控制性能,引入加速度减振率R
(24)
式中:anone与adamp分别泛指未受控与受控结构的加速度指标,如加速度峰值与加速度均方根。据此,可将减振率R分别进一步定义为峰值减振率Rp与均方根减振率Rr。
切入与额定状态下,TMD与AMD的减振性能分别如图12、图13所示。整体来看,AMD对于响应的控制作用都优于TMD:在切入状态下,TMD几乎无法有效控制塔顶响应,而AMD的峰值与均方根减振率分别达到9.05%与13.22%;在额定状态下,TMD的控制效果较切入时有了改善但其减振效率依旧低于AMD,此时AMD的峰值与均方根减振率分别达到11.13%与17.07%。对比AMD在风机不同工作状态下的表现,可以看出AMD在额定状态时的减振性能略高于切入状态。
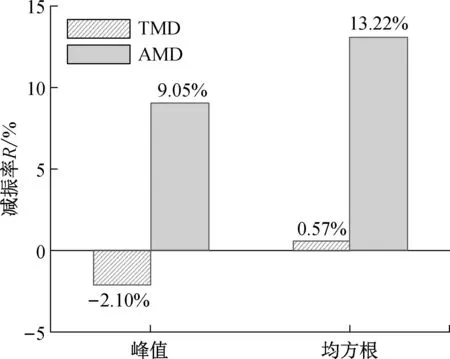
图12 切入状态加速度时程对比

图13 额定状态加速度时程对比
切入与额定状态下,TMD与AMD的减振频谱图分别如图14、图15所示。从图14和图15可知,TMD与AMD的主要控制频段均位于塔架一阶频率附近,不同之处在于AMD的减振频带更宽,甚至会对3P频带起到一定控制作用。究其根本,从式(21)中可知,AMD实质上改善了风电结构的系统矩阵A,由于该矩阵主要信息为结构质量、一阶频率及阻尼比,缺乏风轮转速的信息,因此在控制时也更侧重对塔一阶频率及相邻频段的控制。另外,AMD可以影响3P频带的原因在于LQR算法的反馈增益会根据响应反馈控制力。

(a) AMD

(a) AMD
前文提到,AMD在额定状态的减振性能略高于切入状态,可以在频谱图中得到解释:切入状态下,在低风速的变速控制中,塔顶响应频谱的3P峰更加突出,塔一阶振动在气动阻尼的影响下较为微弱,AMD发挥的空间比较有限;而在额定状态,塔一阶峰较切入状态更突出,因此也会受到更好的抑制。这一特点是由AMD的反馈机制决定的。
3.3 性能曲线
RNA运行作用下,风电结构在不同状态中具有不同的动力响应特点,而AMD在不同风机状态下也有不同的表现。考虑到风机实际运行中,风速是随机不可控的,因此探究AMD在全运行风况下的控制性能是有必要的。本文考虑了3~25 m/s的平均风速,每组平均风速中考虑了10组随机湍流风。通过批处理程序计算质量比μ=0.05的AMD与TMD在每种风速条件下的均方根减振率Rr,如图16所示。
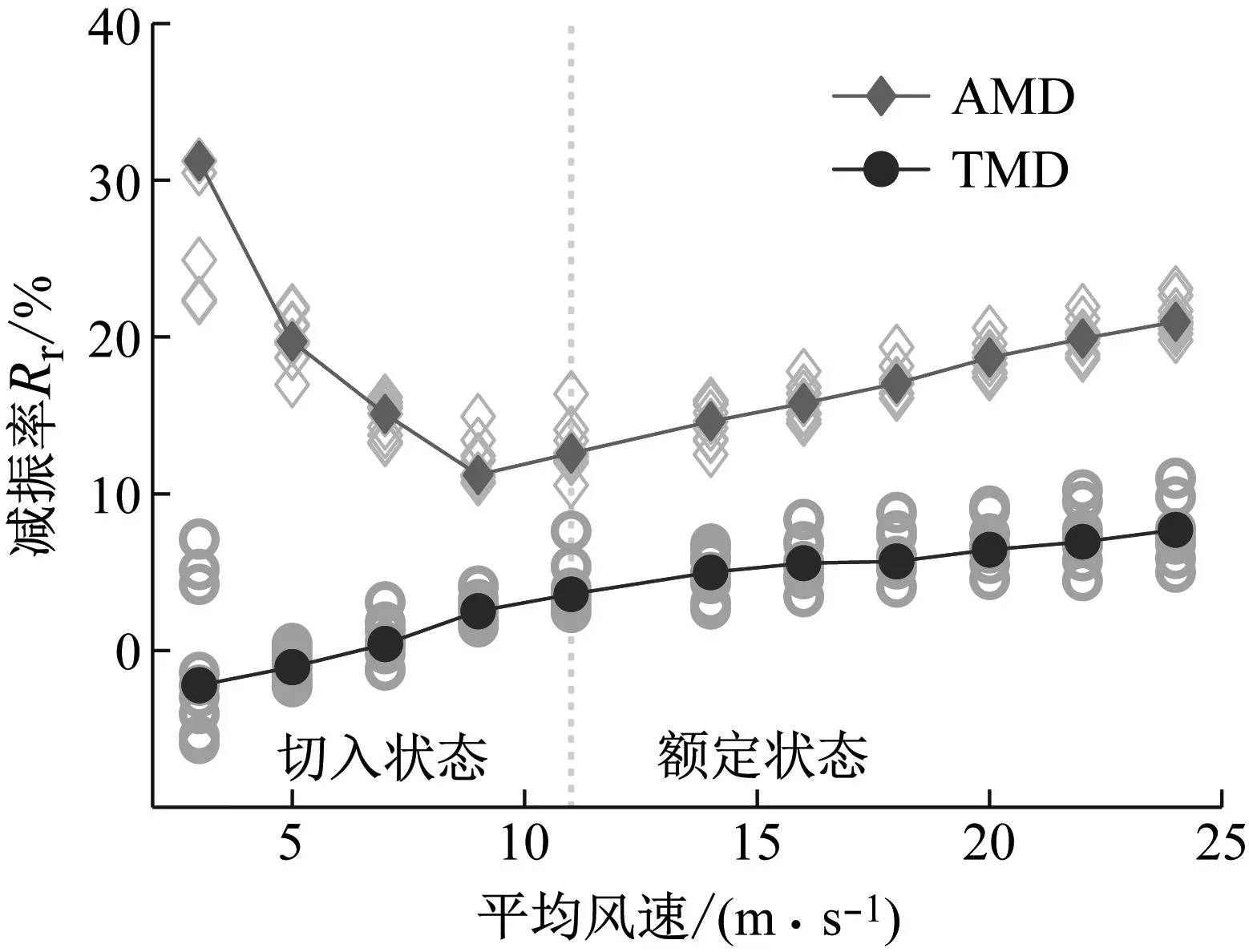
图16 TMD与AMD的性能曲线对比
从图16可知,AMD的减振性能随风速的增加先降低后提升,拐点风速会低于额定风速(11.4 m/s),这是由于当平均风速接近额定风速时,湍流风的瞬时风速会在某些时刻达到额定风速使风机进入额定状态;结合前文的分析,此工况下AMD的减振性能会有所提升,故出现拐点。相较之下,TMD的减振性能随风速的增加而持续上升。对比可知,AMD在任何风况下的控制性能都优于TMD ,减振率Rr高出超10%。
切入状态减振性能随风速增加而降低的原因在于:当风速较低时,塔一阶峰与3P峰的距离较近(塔一阶频率保持0.278 Hz,3 m/s的3P频率约为0.35 Hz,7 m/s的3P频率约为0.42 Hz),AMD在控制塔一阶峰的同时更容易辐射到3P频段的幅值;随着风速增加,两峰值距离越来越远,AMD侧重于塔一阶峰的抑制,对3P峰的影响降低。额定状态下,AMD减振性能随风速增加而增加的原因在于气动荷载越来越小,塔顶响应中的气动成分越来越低,塔一阶振动越来越剧烈,AMD的发挥空间逐渐变大。总体来说,作为风电结构RNA运行状态下的控制方案,AMD具有较可观的减振性能。
4 结 论
本文考虑风机RNA运行的变速、变桨控制,基于单自由度等效风电塔模型,研究了AMD对塔顶前后向响应的控制作用,通过与TMD的对比考察了AMD的减振性能与控制特点,得到以下结论:
(1) 通过考虑RNA运行作用下的气动阻尼与气动推力,单自由度等效模型可以较好地模拟风电塔前后向的响应频谱特征。
(2) 基于LQR控制算法的AMD可以较好地抑制塔顶前后向加速度响应,其控制性能显著超过TMD。
(3) AMD的本质在于改善受控风电塔的动力特性,其主要控制频段依旧为塔一阶频率及相邻频段,但由于主动反馈机制,AMD的控制作用会辐射到3P频段。
(4) 由于3P转频的时变性,AMD的减振性能随风速的增加先降低后提升,拐点位于额定风速(11.4 m/s)处,在风机的全运行风况内都有较好的控制性能。
