考虑界面接触的磁悬浮转子高阶模态自激振动抑制研究
2023-12-18王艺宇徐园平张一博
王艺宇, 周 瑾, 周 扬, 徐园平, 张一博
(南京航空航天大学 机电学院,南京 210016)
主动磁悬浮轴承依靠可控的电磁力将转子悬浮在参考位置处,因为其具有无摩擦损耗、高转速、低功耗等优点,在压缩机、分子泵、膨胀机等高速旋转机械中得到了广泛的应用[1]。在此类的系统中,叶轮与转子之间存在由螺栓连接的接触界面改变转子的固有属性,减弱了转子系统模态阻尼,降低了磁悬浮轴承转子系统的性能及稳定性,严重时会诱发与转速无关的高频模态振动现象,导致转子在静态悬浮时出现啸叫甚至失稳,因此此类问题不容忽视[2]。
目前国内外关于接触界面及其对机械轴承转子系统的影响已经进行了一定的研究。李辉光等[3]基于弹塑性理论对长方微元体表面进行有限元接触分析,计算表面接触刚度的计算公式,得出了不同载荷下的法向合切向接触刚度。易均等[4]针对拉杆柔性组合转子系统,通过微观接触界面有限元分析,得到其宏观接触刚度,并将接触界面等效为无质量连接弹簧单元,基于拉格朗日能量法,建立接触界面附加刚度矩阵的一般形式,并分析了其对转子系统的动力学特性影响。Wang等[5]探究拉杆转子中不平衡对考虑接触拉杆转子非线性动力学影响,基于达朗贝尔原理推导了考虑不平衡激励、非线性油膜力和盘间非线性接触特性的非线性运动控制方程。虽然上述文献对界面接触建模取得了一定的成果,但是对于磁悬浮轴承转子系统中界面接触的引起的模态振动现象研究较少。
而在磁悬浮转子弯曲模态振动抑制中,也有相关学者做了一些研究。魏彤等[6]研究了在磁悬浮控制力矩陀螺(control moment gyroscope,CMG)中转子的一阶弹性模态自激振动问题,提出了一种仿真确定陷波器(notch filter,NF)参数的方法,通过NF优先抑制了转子的高频模态振动。张剀等[7]针对磁悬浮动量轮系统中的结构模态振动,使用一种基于迭代过程的方法抑制共振,分别采用零极点对及μ综合的方法进行控制器设计,有效的抑制了系统结构模态振动。谷会东等[8]在氦气透平试验台中采用了LQG(linear quadratic Gaussian)与相位补偿器串联的控制方法使转子顺利超越临界转速并实现稳定运行。李红伟等[9]在HTR-10氦气气轮机磁悬浮轴承系统控制器设计中,针对低刚度控制器下模态频率容易被激发的问题,通过引入两个相位补偿环节实现了对转子的稳定悬浮并顺利超越第二阶挠性临界转速。Mushi等[10]针对压缩机中的气动干扰,基于柔性转子模型设计了μ综合控制器,实现了对气动扰动的抑制及过临界转速运行。Ran等[11]设计了H∞、μ综合等鲁棒控制器,有效抑制了转子的过临界振动,实现了超临界运行。在前文研究中,所使用的零极点等控制方法存在比较复杂的参数整定过程,设计难度较大。工程中常用陷波器、相位补偿器实现对模态振动的抑制,但是界面接触引起的模态振动更多的是体现在幅频上面的变化,采用相位补偿器存在较为复杂的参数整定且提供的阻尼有限,串联陷波器会影响系统相位特性从会影响系统稳定性[12]。而传统的磁悬浮鲁棒控制研究主要针对过临界转速工况下的研究,且所建立的柔性转子模型均存在系统阶数过高、难以实现等问题。
为了构建出模型阶数较低且可以有效抑制高频模态振动的磁悬浮轴承转子系统被控模型,在传统磁悬浮轴承刚性转子系统建模的基础上,基于柔性转子模态理论重构转子传递函数模型,并基于此模型设计H∞鲁棒控制器实现高频模态振动抑制,试验表明所设计的鲁棒控制器可以有效抑制界面接触引起的磁悬浮轴承转子系统高频模态振动。
1 动力学系统分析
1.1 考虑界面接触的磁悬浮轴承转子系统建模
磁悬浮轴承柔性转子系统控制框图,如图1所示。其中包含控制器、传感器、功率放大器、磁悬浮轴承电磁力模型、考虑界面接触的柔性转子模型等。
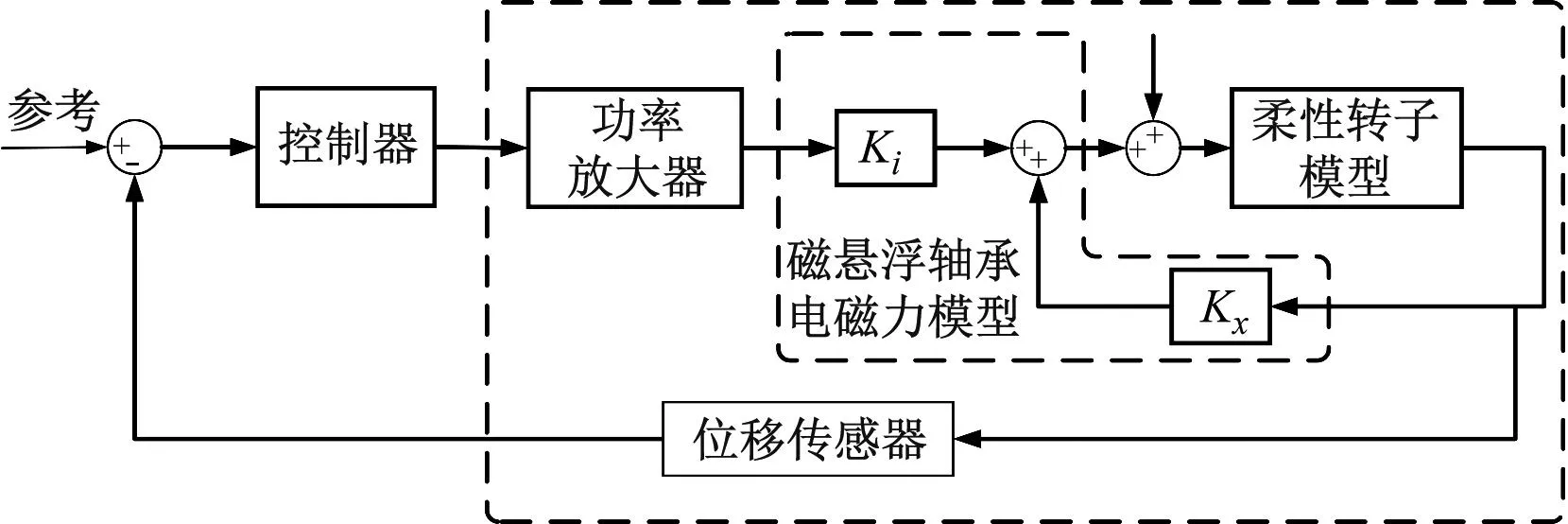
图1 磁悬浮轴承转子系统控制框图
多自由度柔性转子有限元模型示意图,如图2所示。首先建立考虑界面接触的柔性转子模型。
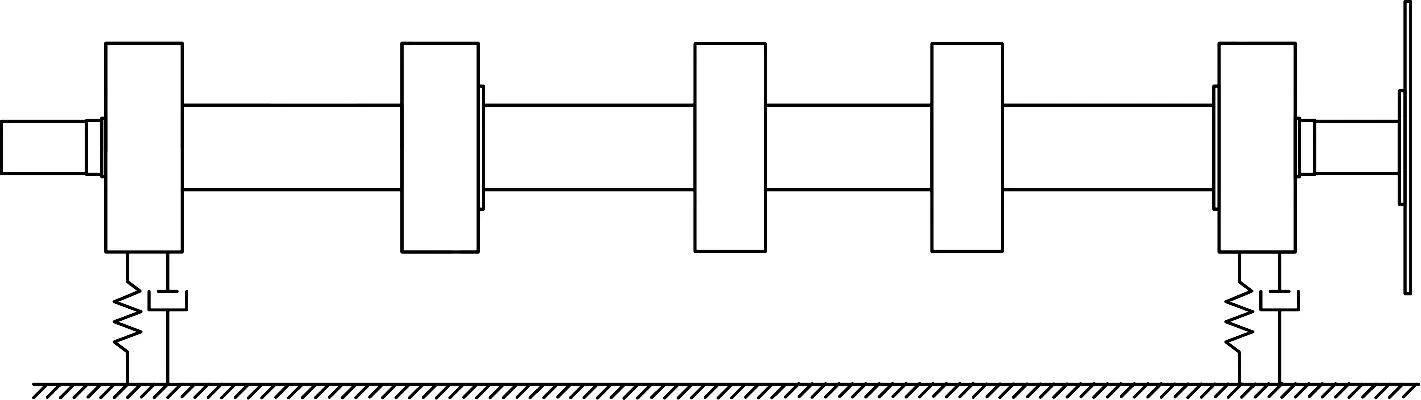
图2 转子示意图
本文采用有限元建模方法,基于Timoshenko梁单元模型,将转子划分为n-1个弹性轴段,每个轴段存在两个节点,每个节点存在四个自由度(轴向转动与位移忽略),共有n个节点。同时根据临界速度计算收敛条件,在对转子系统进行单元划分的过程中需保证每个单元的长径比小于1[13]。因此可以建立转子系统的广义坐标q为
q=[x1,y1,α1,β1,x2,y2,α2,β2,…,xn,yn,αn,βn]
(1)
该模型的运动微分方程可以表示为
(2)

所建立的接触单元如图3所示。将接触界面单元建立为无质量弹簧单元,其法向刚度为kf、切向刚度为kq[14],通过拉格朗日公式求得接触刚度矩阵Ke。
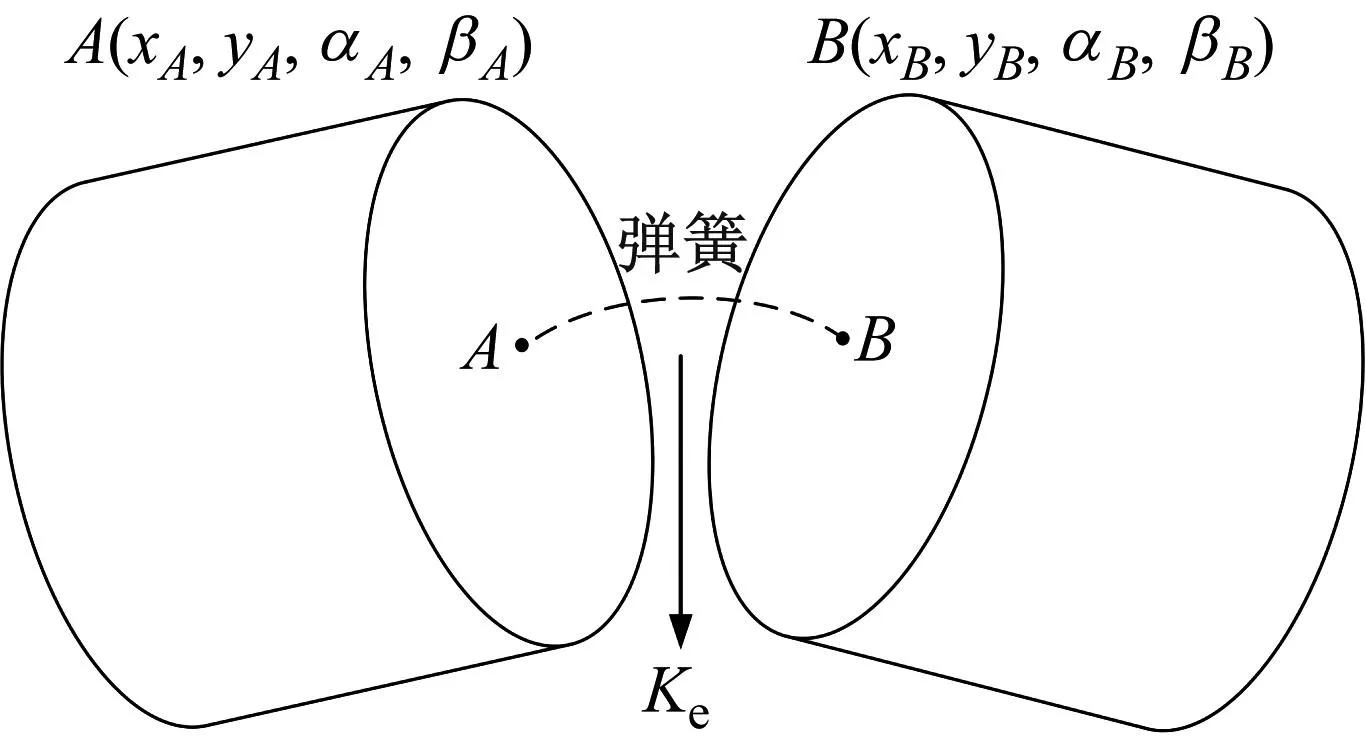
图3 接触界面示意图
当A、B两点发生相对位移时,对转子系统产生内部扰动力Fcontact可以表示为
Fcontact=Keq(A,B)
(3)
式中,q(A,B)为叶轮与转子端面之间设定的无质量弹簧单元两节点坐标,可表示为
q(A,B)=(xA,yA,αA,βA,xB,yB,αB,βB)
(4)
附加接触刚度Ke可以表示为
Ke=
(5)

转子系统的动力学方程可以表示为状态空间
(6)
式中:所描述的系统存在n个节点,4n个自由度,8n个状态变量。本文所建立磁悬浮轴承系统主要包含两个径向磁悬浮轴承,因此存在4个控制输入,4个位移输出,所建立的内部扰动力Fcontact主要由转子与叶轮端面接触界面产生,其存在8个内部扰动输入。
1.2 磁悬浮轴承转子系统模态特性分析
由前文可知,相较于传统的磁悬浮柔性转子建模,考虑界面接触的磁悬浮轴承转子系统主要是引入了接触界面带来的接触刚度。由于接触刚度的存在使得接触面两节点间位移产生了内在的扰动力改变转子的动力学特征和运动特征,削弱了转子模态阻尼,影响了转子的稳定性。转子结构如图4所示。考虑接触界面的磁悬浮轴承转子系统的主要参数,如表1所示。
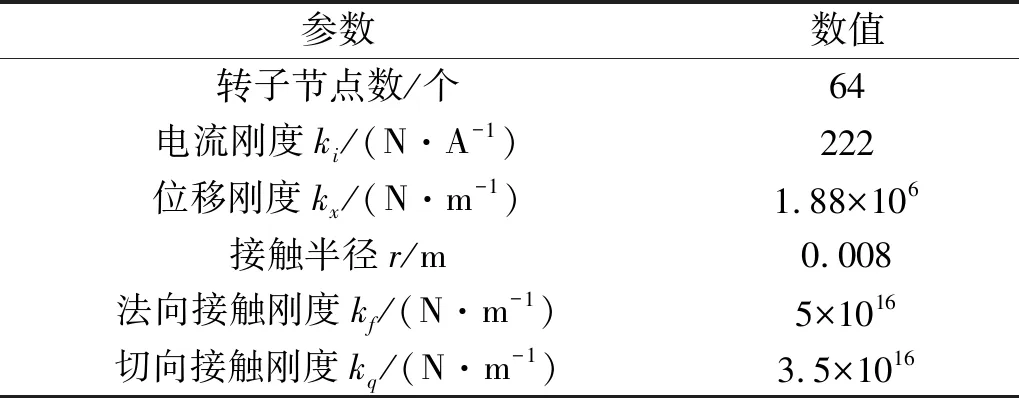
表1 磁悬浮轴承转子系统主要参数

图4 转子结构图
转子芯轴采用GH4169高温合金材料,传感器检测环采用黄铜材料,转子结构参数如表2所示。表1主要体现了当前转子建模参数,将转子分成64个节点,其中包含集中质量点及基于Timoshenko梁单元建立弹性轴段。组装整体质量、刚度、阻尼矩阵,编写有限元程序,求解各阶弯曲模态频率及归一化振型,计算结果如表3及图5所示。
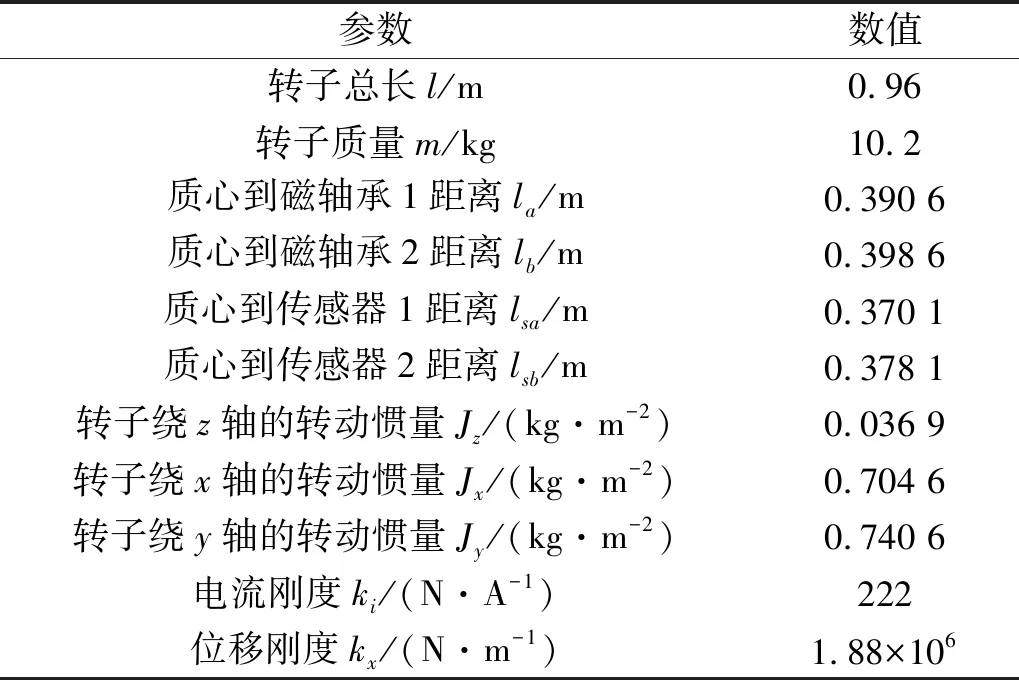
表2 磁悬浮轴承转子系统主要参数
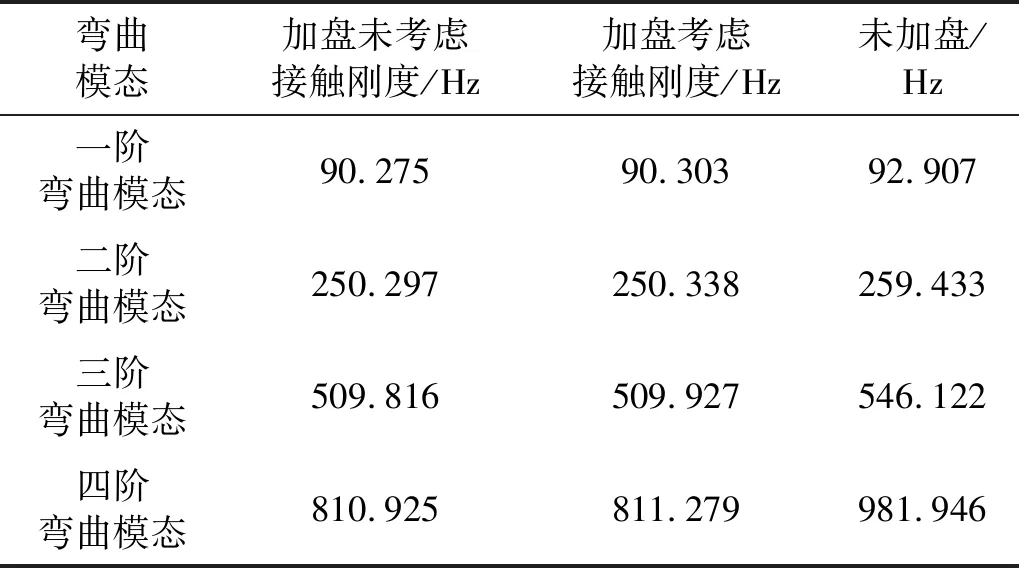
表3 磁悬浮轴承转子系统模态频率
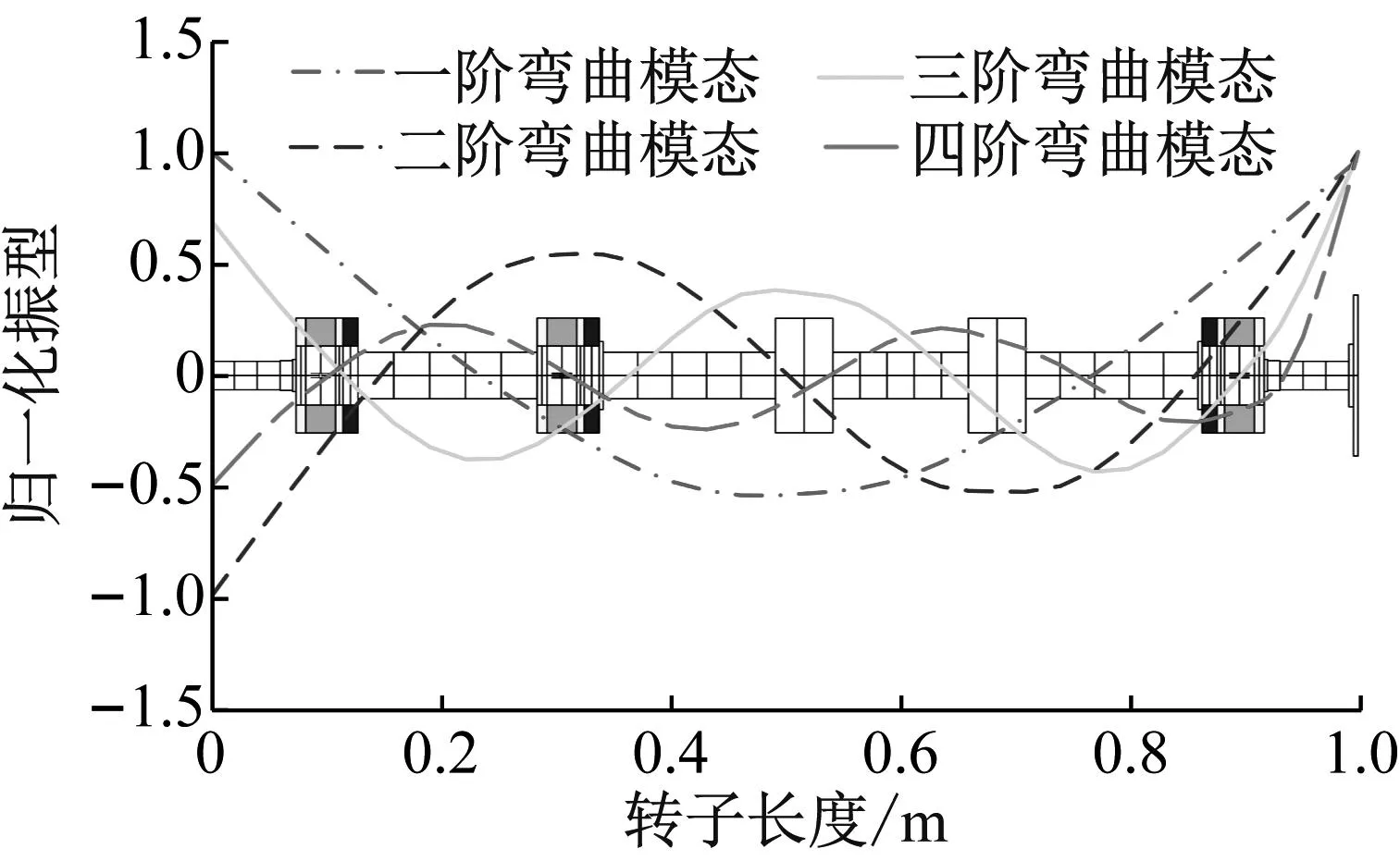
图5 转子振型图
一般工作转速在一阶弯曲临界转速附近或超过临界转速工况下或出现高频模态振动时,转子会被视为柔性转子。模态频率为整个频域较为脆弱的点,一般模态频率处模态阻尼较小,如果出现与模态频率同频的扰动极容易造成转子系统失稳,甚至某些模态频率本身就不稳定,因此需要分析磁悬浮轴承转子系统的稳定性,并针对系统的频响特性进行控制器设计。
1.3 磁悬浮轴承转子系统机电一体化建模
在基于Simulink的考虑界面接触磁悬浮轴承转子系统振动位移仿真中首先需建立磁悬浮轴承系统机电一体化模型(见图1)。其主要包括转子模型、控制器模型、磁悬浮轴承电磁力模型、功率放大器模型、位移传感器模型。
(1) 转子模型
转子模型采用前文建立的转子有限元模型,其表达形式见式(6)。由于本文仿真主要以静态悬浮为主,因此可以忽略转子系统的陀螺效应。
(2) 电磁力模型
磁悬浮轴承结构如图6所示,其采用差动工作方式,转子在一个自由度上受到两个方向相反的电磁力作用。
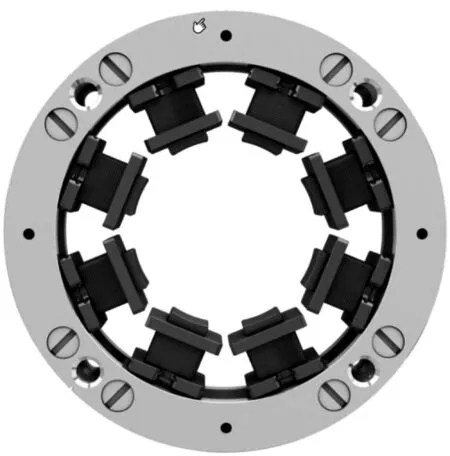
图6 电磁力示意图
线圈电流为偏置电流i0和控制电流ix之和。在检测转子的实时位置后控制系统通过一定的控制算法,调节控制电流,实现对转子位置的反馈控制。因此转子在一个方向上的受力为
(7)
式中:μ0为真空磁导率;Az为电磁铁的磁极面积;Nd为线圈匝数;x0为平衡位置处的气隙;xz为转子相对于平衡位置的位移。将式(7)在xz=0和ix=0处泰勒展开并忽略高阶项得到线性关系式为
F=kxxz+kiix
(8)
其中:
(9)
(3) 控制器模型
控制器模型在试验与仿真中均采用不完全微分形式的PID,其传递函数如下
(10)
式中:kP=5;kI=100;kD=0.004;N=10 000。
(4) 功率放大器模型
功率放大器是将控制电压转化为控制电流的关键器件。其驱动电磁线圈产生电磁控制力实现相应的控制。本文采用的为开关功率放大器,其主要由滤波电路、PI电流跟踪电路、PWM调制电路以及单相逆变电路构成。由于转子悬浮时主要工作在线性区,因此可以将其建立为线性模型
Ga=0.34 A/V
(11)
(5) 传感器模型
在磁悬浮轴承转子系统中,主要采用电涡流传感器实时监测转子的位置完成闭环反馈控制。由于传感器检测带宽远高于转子前几阶模态频率,可以将传感器传递函数建模为比例环节,传感器检测位置-0.125 mm到0.125 mm对应的输出电压为0~5 V,所以对应的传感器传递函数为
Gs=20 000 V/m
(12)
1.4 考虑界面接触的磁悬浮轴承转子系统动力学分析
考虑界面接触及未考虑界面接触的磁悬浮轴承转子系统的根轨迹图如图7和图8所示。

图7 考虑界面接触的磁悬浮轴承转子系统根轨迹图

图8 未考虑界面接触的磁悬浮轴承转子系统根轨迹图
由图7、图8可知,考虑界面接触的磁悬浮轴承转子系统根轨迹图中存在右半平面极点造成了系统的不稳定,而不考虑接触界面的磁悬浮轴承转子系统则不存在右半平面极点,通过对极点的分析可知接触刚度的引入导致转子四阶弯曲模态阻尼的下降,导致转子的不稳定,传统的PID控制策略对此类高频模态振动抑制能力有限。
通过Simulink搭建考虑界面接触磁悬浮轴承机电一体化模型并进行静态悬浮仿真,分析其时域响应及频响,结果如图9和图10所示。

图9 磁悬浮轴承转子系统时域响应
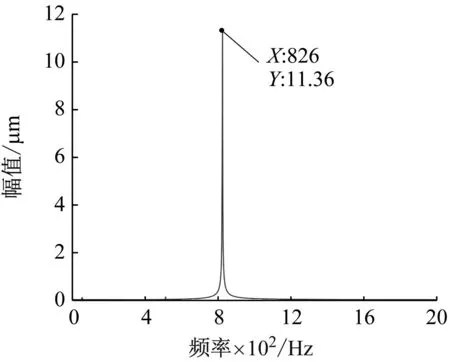
图10 考虑界面接触的磁悬浮轴承转子系统频响分析
由图9、图10可知,考虑界面基础的磁悬浮轴承转子系统在静态悬浮过程中出现了高频振动现象,通过对时域信号进行快速傅里叶变换(fast Fourier transform,FFT)分析可知失稳频率为826 Hz,为转子的四阶弯曲频率。而未考虑接触界面的磁悬浮轴承转子系统可以实现稳定运行,并无模态振动现象。综上所述可以发现,接触界面引起的磁悬浮轴承转子系统振动频率为转子的模态频率,由于转子的模态阻尼较低导致的模态失稳现象为系统的固有属性,与外界干扰无关。传统的PID控制算法对系统的阻尼作用主要通过增加微分系数kD来抑制振动,而kD系数的增大会放大高频振动,因此对于高频振动的抑制效果有限,为了解决上述问题,常用串联陷波器、相位补偿器等方法抑制高频模态振动。此外,基于柔性转子模型所设计鲁棒控制器由于在过一阶弯曲临界转速工况中能有效抑制转子模态振动且能有效提高系统对不确定性扰动的抑制效果已经得到了广泛研究。考虑到前文所述试验台中磁悬浮轴承转子系统自激振动频率主要为高阶弯曲模态的特性,本文基于重构广义被控对象,设计H∞鲁棒控制器实现对转子高频模态振动抑制。
2 控制器设计与仿真
2.1 鲁棒控制器理论
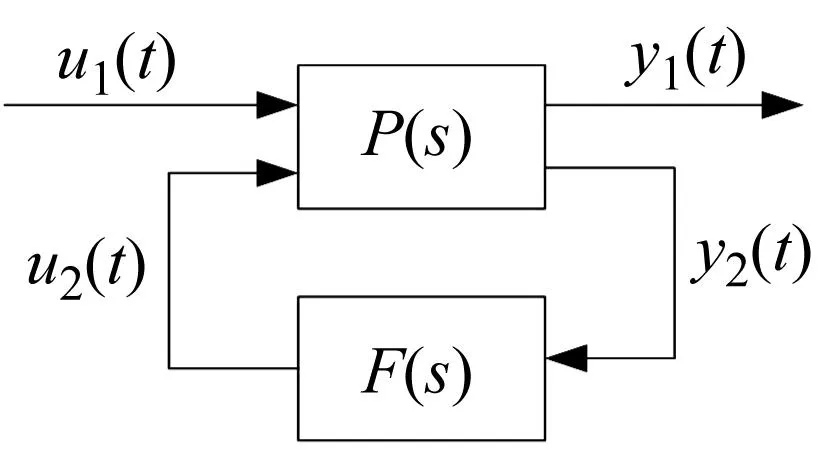
鲁棒控制系统的结构一般如图11(a)所示。P(s)一般为增广被控对象,F(s)为控制器模型,从输入信号u1(t)到输出信号y1(t)的传递函数可以表示为Ty1u1(t)。小增益定理是评价线性控制系统不确定性的理论方法,原理如图11(b)所示。M(s)为已知的线性控制系统,Δ(s)为一未知增益函数。
(a)
当且仅当小增益条件
(13)
满足时,所示系统对所有稳定的Δ(s)都是良定且内部稳定的,即引入该系统的外界扰动信号将随着在环路中的循环而逐渐减小。
对于线性控制系统,常采用以下方程表达控制对象的模型
(14)
其相应的增广状态方程描述为
(15)
其由外部输入u1(t)到外部输出y1(t)的闭环系统的传递函数可以写成
Ty1u1(s)=P11+P12[I-F(s)P22(s)]-1F(s)P21(s)
(16)
而标准的H∞控制问题可以转化为设计镇定控制器F(s)使
(17)
混合灵敏度问题是H∞控制的经典问题,为了保证系统的鲁棒性和提高系统的跟踪性能通常都是将设计模型转化为一般混合灵敏度问题进行求解,其加权控制结构如图12所示。

图12 混合灵敏度控制框图
图12中rec、e、u、d、y和z别为参考信号、偏差信号、控制信号、干扰信号、输出信号、观测信号。W1、W3分别为系统的灵敏度、补灵敏度加权函数、W2加性不确定性而引入系统的加权函数,其中rec到z的传递函数分别为W1S、W2R、W3T,据小增益定理,系统鲁棒稳定性的充分条件是
(18)
可得其增广模型表达为
(19)
定义系统的灵敏度函数S(s)、补灵敏度函数T(s)以及R(s)分别为
(20)
(21)

(22)
S(s)既是扰动d到输出y及参考信号rec到偏差信号e的闭环传递函数,体现出控制系统的抗干扰能力。T(s)为参考信号rec到输出y的闭环传递函数,体现出输出y对参考输入rec的复现能力,同时T(s)表现出对乘性不确定性产生干扰的抗干扰能力。由于S(s)+T(s)=I的限制,导致不能使灵敏度传递函数和补灵敏度传递函数的增益同时变小,为保证系统的抗干扰能力,需要借助权函数W1和W3对S(s)和T(s)的频域进行整形。
一般磁悬浮轴承系统的干扰主要为低频干扰信号,而系统的乘性不确定性引起的主要为高频干扰信号,因此灵敏度函数仅需在低频保持较低的增益而补灵敏度函数需要保持高频处的低增益。同时根据鲁棒控制的基本定理W1和W3需满足以下公式
(23)
(24)
因此要求W1在低频处增益较高,并具备低通特性,W3在高频处增益较高,因此具备高通特性。同时需要保证W1的截至频率要充分低于W3的截止频率,否则可能引发系统的不稳定。
W2是对R(s)的权函数,引入W2不仅可以避免式(15)中D12矩阵成为奇异矩阵导致控制器无解,而且R(s)为参考输入rec到控制信号u的闭环传递函数,因此合理选择W2的大小可以限制控制量u的大小,防止控制系统在实际工作中出现严重的控制电压饱和现象。
2.2 被控对象建模
由上文可知,在考虑接触界面的磁悬浮轴承转子系统中存在高频模态振动,为了后续控制器的设计,需要建立被控对象模型P(s)。被控对象直接影响了后续设计控制器的控制效果。传统的磁悬浮鲁棒控制器被控对象主要分为刚性转子模型和柔性转子模型。
基于刚性转子模型设计的鲁棒控制器虽然能够实现稳定悬浮,但是由于刚性转子模型无法体现转子的模态信息,对于考虑接触界面的磁悬浮轴承转子系统中存在高频模态振动现象无法在系统中得以体现,因此所设计控制器不具备控制模态振动的能力。
基于柔性转子模型设计的鲁棒控制器,可以有效的控制弯曲模态振动,在转子过临界转速控制中得到了较多的研究。但随着所构建的柔性转子模型的模态阶数的增加,所设计的控制器的阶数会同步增加。上文所研究系统模态振动频率为转子的四阶模态频率,基于此模型设计的控制器模型可达二十多阶,大大增加了控制硬件的运算量,甚至难以实现实时运算。因此需要设计一种能够表现转子模态特性的低阶转子模型。
主动磁悬浮轴承系统如图13所示。刚性转子主要包括6个自由度:x、y、z方向的平移以及绕x、y、z轴的转动。绕z轴的转动由电机控制,因此磁悬浮轴承只需要控制其他五个自由度[15]。
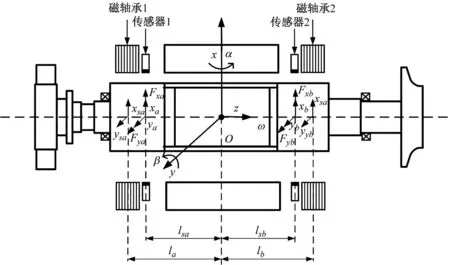
图13 磁悬浮系统示意图
转子的质量为m,质心处的位移为xc、yc、zc。磁悬浮轴承1到转子质心的距离为la,磁悬浮轴承2到转子质心的距离为lb。传感器1到转子质心的距离为lsa,传感器2到转子质心的距离为lsb。根据动量定理和动量矩定理可以得到以下的转子运动方程
(25)
将方程组联立
(26)
式中:Mr为质量矩阵;Gr为陀螺力矩矩阵;Ar为系数矩阵。
(27)
(28)
(29)
质心位移向量:XC=[xcyczcθxθy]T;
电磁力向量:Fz=[FxaFxbFyaFybFzc]T;
由于试验中检测的是传感器处的位移且传感器与磁悬浮轴承位置不重合因此需要相应的坐标转换。
(30)
其中磁悬浮轴承处位移向量:
XL=[xaxbyaybzc]T
传感器处位移向量:
XS=[xsaxsbysaysbzsc]T
控制电流向量:
μ=[ixaixbiyaiybizc]T
位移刚度矩阵:
Kx=diag[KxKxKyKyKz]
电流刚度矩阵:
Ki=diag[KixKixKiyKiyKiz]
转换矩阵:
(31)
(32)
则,式(26)变为
(33)
将质心位移转化为磁悬浮轴承处位移
(MrTL)-1AKxXL+(MrTL)-1AKiμ
(34)
将传感器处的转子位移作为测量输出量,将磁悬浮轴承处位移作为状态向量,可得本文五自由度磁悬浮轴承转子系统的状态方程。
(35)

控制向量:U=μ
输出向量:Y=XS
系数矩阵:
(36)
建立磁悬浮轴承转子系统具体数学模型,需要有关系统的具体参数见表2。
将表2数据代入到方程中,可得系统的状态空间,考虑到本转子径向转动惯量远远大于轴向转动惯量,因此忽略转子的陀螺效应,得到五自由度解耦的传递函数。将系统状态空间方程式(35)转化为传递函数为
G(s)=C(sI-A)-1B
(37)
由此可得其中一个自由度的传递函数为
(38)
可以得到等效的传递函数框如图14所示。

图14 等效传递函数框图
由传统转子动力学可知,柔性转子的高阶传递函数可以被简化为刚体模态与弯曲模态的叠加[16]
(39)
式中:Grr(s)为转子的刚体模态;Gi(s)为转子的弯曲模态。不考虑约束时,刚体模态频率为0,因此刚体模态的传递函数可以表示为
(40)
转子的弯曲模态可以表示为
(41)
式中:mg为刚体模态质量;mi、di、ωi和ti分别为转子的弯曲模态的模态质量、模态阻尼、模态频率和振型。
由上文可知,考虑接触界面的磁悬浮轴承转子系统主要在四阶弯曲频率失稳,为了保证被控对象传递函数阶数最低,同时表达出磁悬浮轴承转子系统模态振动的特性,重新构造转子被控模型,因此传递函数表达式可以表达为等效刚体模态与四阶弯曲模态的叠加
(42)
将被控对象模型代入图14中可得传递函数
P(s)=
(43)
为了验证所建立被控对象传递传递函数的拟合特性,将其频响与磁悬浮轴承系统扫频频响曲线进行对比,扫频试验示意图如图15所示。

图15 扫频示意图
节点1为扫频激励输入点,在转子静浮时输入频率不断上升的正弦激励。节点2为传感器信号检测节点,在激励信号施加后需采集传感器的响应信息。通过对输入输出信号的处理可得节点1、节点2之间的开环传递函数的频响特性,但是由于此开环传递函数包括功率放大器及传感器模型,通过前文所建立的上述两者模型,对频响曲线进一步处理,即可得到所需的被控对象模型。所设计被控系统频响曲线如图16所示。

图16 被控系统频响曲线
从图16可知,试验扫频曲线在约800 Hz处幅频有较大凸起,频率为转子系统的四阶弯曲频率,所建立的转子动力学传递函数能够表现磁悬浮轴承转子系统在四阶弯曲频率处的频响特性。
2.3 控制器设计
根据上文所叙述的加权函数原则进行设计,通过试验调整可得加权函数如下
(44)
W2=2.5×10-7
(45)
(46)
将加权函数W1、W2、W3代入混合灵敏度程序框图,可得广义控制模型P(s),通过MATLAB中的hinflmi命令求出所需要的控制器。其命令形式为

(47)

(48)
式中:
a1=22.67,a2=1.987×104,a3=5.738×108,
a4=5.017×1011,a5=3.83×1013,a6=6.529×1014;
b1=1,b2=1.047×104,b3=3.206×107,
b4=1.33×1011,b5=3.97×1012,b6=1.889×1012。
所设计控制器根轨迹图如图17所示。

图17 控制器根轨迹图
由图17可知,存在零点-75+5.06×103i,能够抵消考虑界面接触的磁悬浮轴承转子系统不稳定模态极点来稳定整体系统。
同时根据上述权函数选择原则,判断所设计控制器是否满足要求,如图18、图19所示。
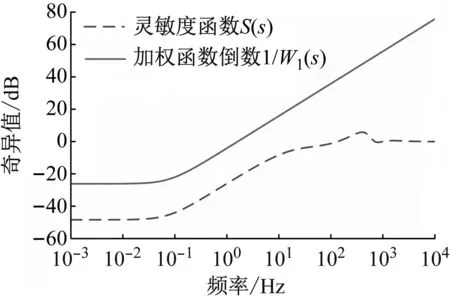
图18 S(s)和奇异值曲线
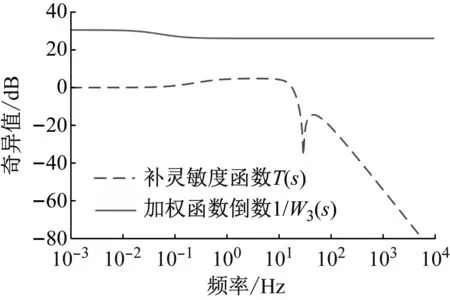
图19 T(s)和奇异值曲线
图18为灵敏度函数S(s)及W1(s)加权函数倒数的奇异值曲线,可以看出满足式(23)的关系式。并且在低频段,灵敏度函数S(s)的增益较小,可以保证控制器对低频扰动的抑制能力。
图19为补灵敏度函数T(s)及W3(s)加权函数倒数的奇异值曲线,从图19可知,满足式(24)的关系式。并且在高频段,补灵敏度函数T(s)的增益较小,可以保证控制器对系统不确定性引起高频扰动的抑制能力。最终求得的控制器频率特性如图20所示。
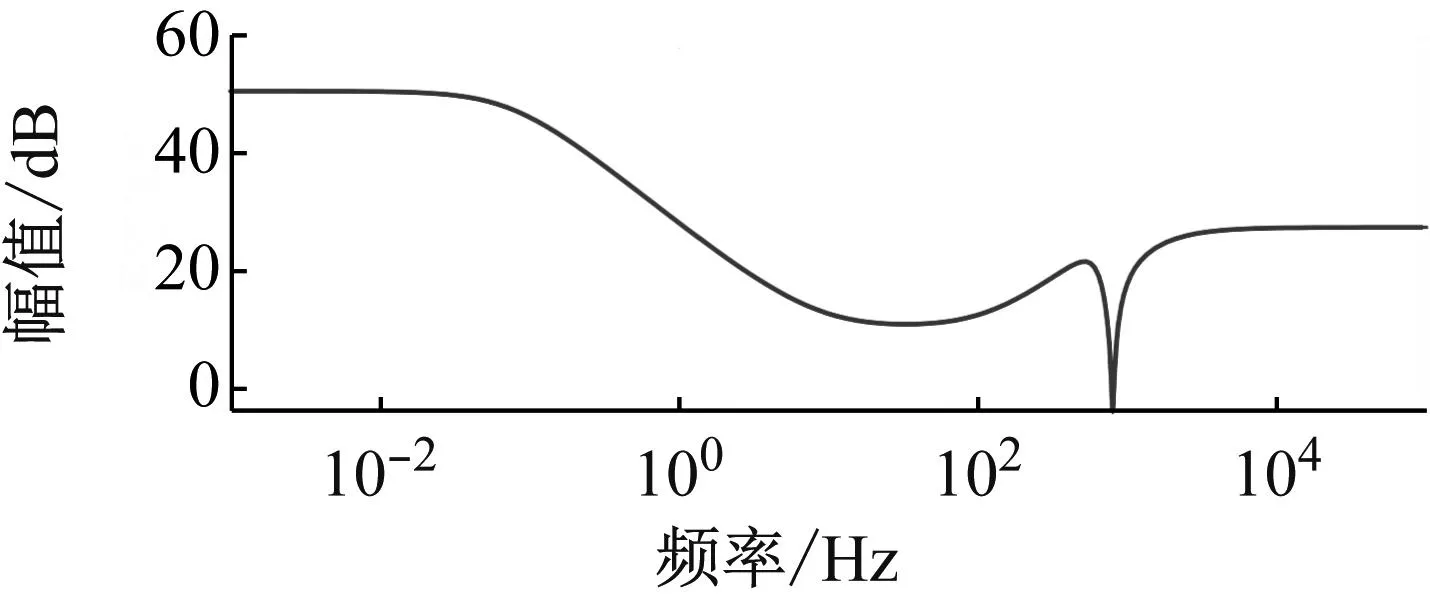
图20 控制器频响特性
由图20可知,在低频段H∞控制器具有明显的积分效应,在中频段可以实现类似于PD控制器的频响特性,在四阶弯曲模态频率处,产生类似于带阻滤波器的频响特性来抑制磁悬浮轴承转子系统的弯曲模态振动。
为了观测所设计H∞控制器在四阶弯曲模态处是否提供了外部支撑阻尼以抑制此类模态振动,画出此系统的动态柔度频响曲线,如图21所示。

图21 闭环系统动态柔度
由图21可知,在四阶弯曲模态频率处闭环系统增益有所降低,证明控制器在此处提供了一定的额外阻尼,提高了磁悬浮轴承对转子第四阶弯曲模态振动的抑制能力。
磁悬浮轴承转子系统闭环单位阶跃响应如图22所示。
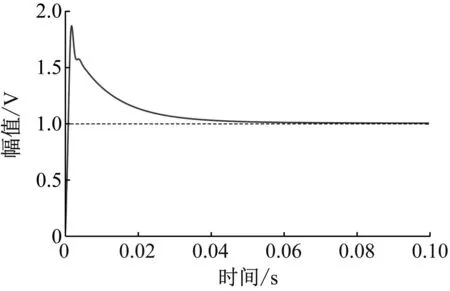
图22 控制系统阶跃响应
由图22可知,在0.06 s之内就可以实现对阶跃信号的跟踪,稳态误差很小,可以实现较好的控制效果。
3 试 验
将上文所设计H∞鲁棒控制器在磁悬浮轴承转子系统中进行试验验证,将金属圆盘通过螺栓连接在转子端面模拟叶轮与转子的接触工况,验证在不同预紧力矩下的鲁棒控制器控制效果,具体连接形式如图23所示。

图23 螺栓连接界面图
图23为磁悬浮轴承转子系统的局部接触界面图,其中1为转子端部,2为模拟叶轮的接触盘,其通过螺栓3与转子端面紧贴,接触状态通过螺栓的预紧力矩及圆盘接触面面积进行区分。
图24为试验布置图,通过dSPACE控制功放控制箱控制磁悬浮轴承实现对转子的控制。
首先验证PID控制器的控制效果,对不加接触盘的转子进行起浮试验,如图25和图26所示。
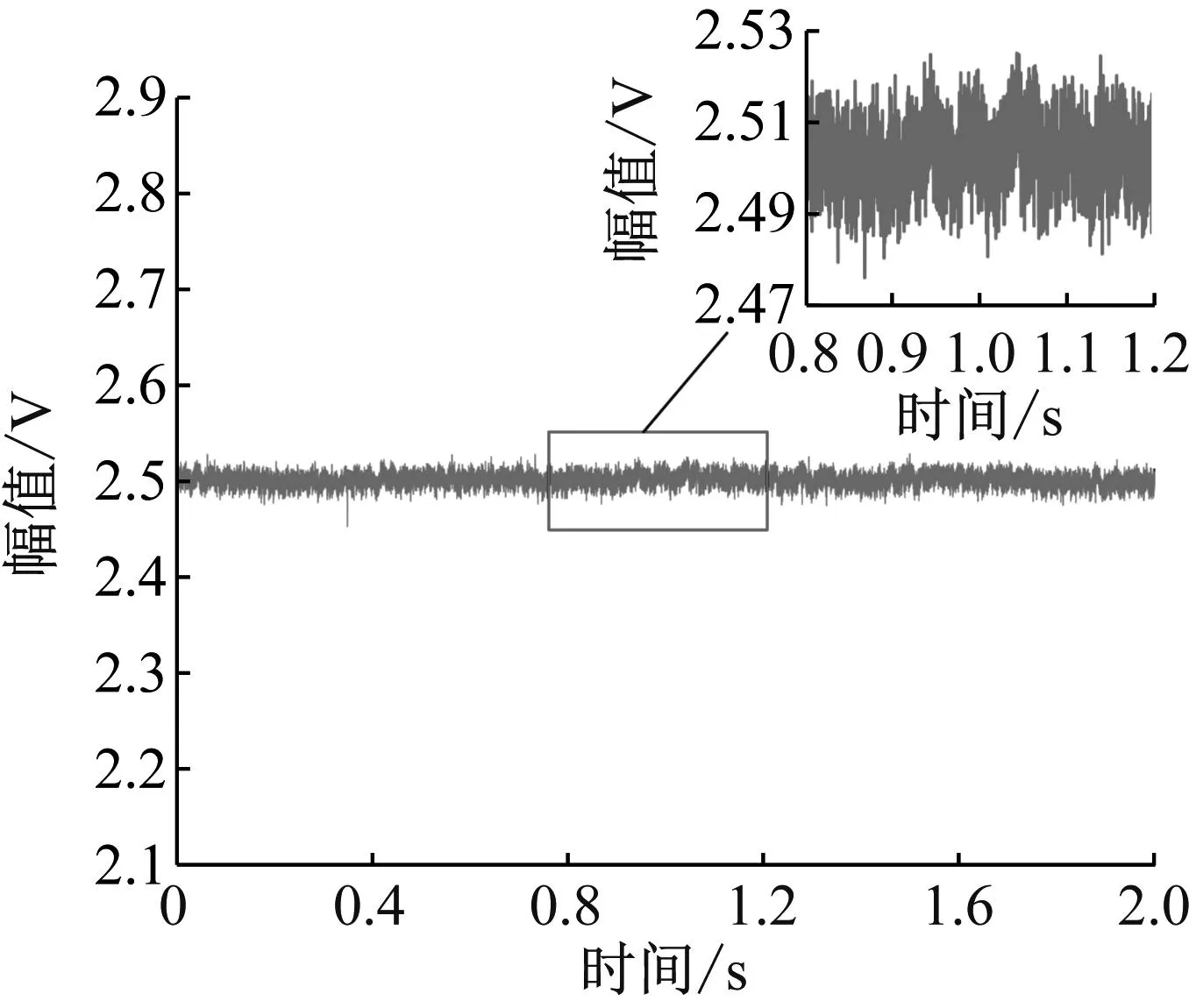
图25 磁悬浮轴承转子系统悬浮时域图

图26 磁悬浮轴承转子系统悬浮位移快速傅里叶变换
由图25、图26可知,其控制效果正常,能够实现转子的稳定悬浮。对位移数据进行FFT分析可知,四阶弯曲频率处无较大幅值,此时转子系统四阶弯曲模态可以保持稳定。
其次验证PID控制器对加接触盘的转子的控制效果,如图27和图28所示。

图27 磁悬浮轴承转子系统振动位移
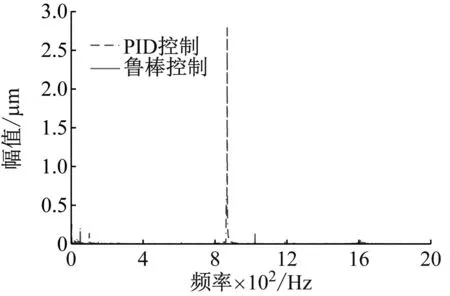
图28 磁悬浮轴承转子系统快速傅里叶变换
由图27、图28可知,在PID控制下转子系统不能实现稳定悬浮。通过FFT分析,在四阶弯曲频率处有较大幅值。当使用所设计的鲁棒控制器时,从时域图可知,实现了稳定的悬浮。通过对信号进行FFT分析,四阶弯曲模态得到了有效控制,振动位移抑制效果达到90%以上。
鲁棒控制器在不同工况下对模态振动抑制效果如图29、图30所示。
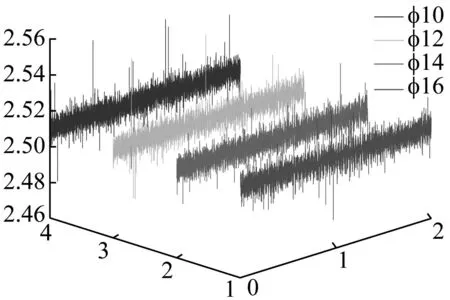
图29 扭矩为0.5 N·m时的磁悬浮轴承转子系统振动位移

图30 扭矩为1 N·m时的磁悬浮轴承转子系统振动位移
从图29、图30可知,分别选取了不同接触半径的圆盘以不同预紧力矩拧紧,在0.5 N·m与1 N·m预紧力矩下的分别采用接触面直径为10 mm、12 mm、14 mm、16 mm的工况下,鲁棒控制器的模态振动抑制效果。在不同工况下均能实现稳定的悬浮且振幅差距较小,达到了预期的控制控制目标。
4 结 论
(1) 为解决磁悬浮轴承转子系统中接触界面引起的转子高频振动现象,设计了H∞鲁棒控制器对模态振动进行抑制。当存在接触界面时,附加刚度的存在会改变系统的固有属性,减弱了转子系统模态阻尼,导致磁悬浮轴承转子系统产生四阶弯曲频率的高频模态振动。
(2) 为了对转子的模态振动进行抑制,需建立的被控模型体现转子的频响特征,传统的刚性转子模型无法体现转子的模态振动特性,因此对转子系统进行扫频,得到其频响特性,通过传统的柔性转子传递函数模型,对其进行拟合,并对此模型进行鲁棒控制器设计。
(3) 相较于传统的PID控制,基于柔性转子模型的鲁棒控制器,可以充分考虑转子系统的动力学特性,针对于转子系统的弱阻尼模态频率,抑制磁悬浮轴承转子系统中四阶弯曲模态频率信号的传递,有效的抑制磁悬浮轴承转子系统的高频模态振动,振动抑制效果达90%以上。
