空间柔性绳网多碎片捕获动力学研究
2023-12-14张豪杰宝音贺西
张 宇,张豪杰,程 彬,宝音贺西
(清华大学航天航空学院,北京 100084)
0 引言
随着人类空间活动的不断发展,卫星发射数量逐年增加,为现代通信、导航、遥感等多个领域带来了极大的便利。然而,这种进步的背后也伴随着一个严重的问题——空间碎片。空间碎片是指那些废弃的人造卫星、火箭舱段、碎片以及其他失控的航天器残骸等,对正常运行的航天器构成了巨大的威胁[1]。
空间碎片源于卫星相互碰撞、退役卫星的解体等,这些碎片逐渐积累,并在不同的轨道高度分布。地球轨道上的空间碎片数量庞大,速度极高,即使很小的碎片也可能对卫星和航天器造成致命的损害。这不仅会影响航天器的正常运行,还可能导致大量经济损失和潜在的生命危险。此外,空间碎片的逐渐积累还可能引发一种连锁反应,当空间碎片数量达到一定程度时,它们之间的碰撞会产生更多的碎片,进一步加剧空间碎片的数量,形成一种恶性循环。
对于空间碎片的捕获问题,从捕获策略上来看,主要可以简单地分为刚性连接机构捕获和柔性连接机构捕获[2]方式。在刚性连接机构方面,触手单机械臂和多机械臂已经被广泛研究[2-6]。与柔性捕获技术[2]相比,刚性材料的强刚度、地面试验的便捷性和较深厚的技术储备是其所有的明显优势。使用刚性机构进行碎片捕获的过程中必须要保证高精度的轨道与姿态控制,这是采用刚性机构进行抓捕的难点所在。此外,由于空间中的物体在不断的运动,刚性机构在任务过程中也容易受到破坏。对于柔性连接机构来说,通常使用的有鱼叉[7-8]、系绳夹持器[9-10]和绳网[2,11]等。柔性机构具有高灵活性,无须高精度的控制即可在空间中捕获目标碎片。和刚性机构相比,构成柔性机构的材料在选择的范围上更加广泛,制造成本更加低廉。其次,柔性机构的适用性更广,对于碎片的大小、形状等特征的兼容性更强。基于柔性机构以上各方面的优势,其在近年来受到了越来越多的关注。本研究中也考虑了一种柔性网结构,由一个柔性绳网与几个连接到边角的质量块组成。
微重力环境下的物体接触过程是强非线性的。由于空间碎片在轨道上运动,同时往往还带有一定程度的转动,增加了使用绳网捕获的难度。另外,空间碎片的形状往往是不规则的,绳网在和碎片接触后也会发生形变;旋转的碎片对绳网的影响最严重,当碎片的旋转速度很高时甚至会将绳网撕裂,以致挣脱捕获。当绳网成功捕获目标碎片后,往往还需要将碎片拖入大气层中烧毁,因此在捕获后如何对绳网进行控制也是一个值得研究的问题。
使用绳网来对空间碎片进行捕获,学界中的很多学者已经在该领域进行了多方面的研究。Shan等[12]研究了翻滚空间碎片的接触动力学建模方法,建立了绳网动力学和碎片动力学模型,模拟了捕获过程的运动。Shan等[13]比较了质点-弹簧法和ANCF法的柔性建模,首次通过仿真分析了两种建模方法的差异与优势。Shan等[14]还利用质点-弹簧法和绝对节点坐标法构建了柔性网的非线性本构模型。Hou等[15]采用离散弹性杆法和能量守恒积分法建立了绳网的动力学模型。其采用该方法研究了绳网的展开过程。Zhao等[16]提出使用系绳的空间机器人对固定的圆柱形空间碎片进行捕获,建立了相应的接触动力学模型,对接触的过程进行了分析并提出了用滑模控制的方法来收网。但是上述研究均没有考虑绳网捕获碎片之后或控制后的运动,无法对碎片进行完全的清除。Zhao等[17-18]还研究了空间绳网机器人在理想捕获情况下动力学与控制的建模方法,考虑了绳网与碎片之间的碰撞不是对心碰撞的情形。然而该研究假定在捕获的过程中目标碎片始终是静止的,没有考虑碎片在接触后的运动。实际上在微重力的环境下,绳网与碎片接触后会导致碎片产生平动以及旋转运动。Si等[19]模拟了空间碎片的绳网捕获过程,研究中考虑了绳网系统中的自碰撞问题。对比实验结果可以发现,考虑绳网之间的自碰撞会导致捕获的过程发生变化。实际上在碎片捕获的过程中绳网的自碰撞应该被考虑进去,以增加仿真实验的准确性。Si等[20]还提出了一种分离闭合机制,在绳网与目标碎片接触前后开始工作,均能够成功地闭合。研究仿真模拟了绳网捕获固定球形目标的场景来验证文中所提出分离闭合机制的有效性。Benvenuto等[21]提出了一种由航天器和柔性网组成的绳网捕获系统,航天器可以拖动柔性网来清理捕获的碎片。其中柔性网通过一根长绳连接在航天器上,可由机械装置实现闭合。然而该机械装置只可实现柔性网的闭合,而不能打开。因此在使用的过程中一次能够清理的碎片数量有限。Endo等[22]研究了捕获问题中影响捕获鲁棒性的因素,如绳网和碎片之间的距离以及碎片的尺寸等。Botta等[23]提出了一种用作绳网捕获空间碎片的系索驱动的绳网闭合模型。Gärdsback等[24]研究了一种成功旋转展开的鲁棒控制方法,提出了利用解析三自由度模型和全三维有限元模型对空间柔性网展开进行分析。
本文针对该问题,重点研究了通过柔性网捕获不规则旋转碎片的方法。建立了柔性网在捕获过程中的动力学模型,还建立了碎片的动力学模型以模拟碎片的运动,包括平动以及转动。与现有的空间碎片捕获机制相比,柔性网可重复打开或者关闭,能够更加灵活地捕捉多个空间碎片。数值仿真结果表明柔性网捕获方式具有良好的捕获能力,碎片可以被完全包围,并沿着预期的轨迹进一步被拖走。根据评估指标,绳网对于碎片的包裹是稳定的,有望在未来的任务中施行。
1 捕获系统动力学模型
1.1 柔性绳网的本构模型
柔性绳网的本构模型是通过 Kelvin-Voigt 方法构建的[11,25-27],在该模型下对物体运动和速度进行计算所需的时间更少,并且该模型对于大规模柔性绳网的模拟能够做到足够准确。具体来说,绳网中的每条线可以通过组合多个质点和弹簧阻尼并联的方式来离散化。柔性绳网的质量主要集中在节点上,因此通过获取每个节点的动力学模型来建立整个绳网的动力学模型。在建模时,每个质量块都连接在绳网的角点上,当作一个绳网的节点。参照Kelvin-Voigt方法,在柔性网中,线p的张力Tp的本构模型为
(1)

当柔性绳网在近地环境中移动时,微重力和其他的空间扰动会影响它的运动。另外,如果柔性绳网与碎片接触,包括法向支持力和切向摩擦力的接触力也会影响柔性绳网的运动。质量块的动力学方程和绳网节点的动力学方程相同。故柔性绳网系统的动力学方程可以表示为

(2)
1.2 碎片动力学模型
在捕获任务中,单个碎片受到的力包括微重力、扰动力、网接触力和其他碎片的接触力。接触力包括来自柔性绳网和其他碎片的法向反作用力和切向摩擦力,其次接触力也会对碎片的旋转运动产生影响。因此碎片动力学方程可以表示为
(3)
1.3 碎片接触动力学模型
如果柔性网与碎片间发生了碰撞,或者碎片之间发生碰撞,由此产生的法向接触力以及切向摩擦力会对网和碎片的运动状态都产生影响。接触时的力学特性是模型仿真中最重要的部分。在本项研究工作中,软球离散元方法[28]被用在绳网与碎片、碎片与碎片之间的碰撞建模中。
根据该方法,网节点i的法向接触力为
(4)
(5)
(6)

(7)
接触时产生的摩擦力也会对碎片的运动以及姿态变化产生影响。在这里用简化的库伦摩擦模型来计算摩擦力
(8)
(9)
其中,μs是静摩擦系数,μd是动摩擦系数,ε是静动摩擦转换的过渡值。
(10)
2 仿真与分析
本章基于空间柔性绳网动力学模型和多碎片接触碰撞动力学模型,对空间多碎片捕获场景进行了仿真。通过给碎片设置不同的角速度,进一步研究了空间柔性绳网与碎片的接触情况,从而探究空间绳网的捕获能力。
为了深入了解整个捕获过程,柔性绳网和碎片根据4个关键变量进行评估:绳网的最大拉伸力,质量块的位移和速度,碎片的位移、速度及角速度,柔性绳网与碎片之间的接触力。这些关键变量可以揭示柔性绳网与碎片之间的相互作用。
2.1 仿真验证
如图1所示,空间碎片以不同的角速度旋转并且移动,速度最大可达22 cm/s。10个碎片的形状是随机创建的,碎片材料选择为航天器常见制造材料铝合金[30-31],碎片之间最大间距不超过4 m[32],碎片的其他模拟参数列于表1中。柔性绳网的展开形状如图2所示,柔性绳网有4个牵引块,每个牵引块的初速度为10 cm/s,质量为10 kg[33]。柔性绳网的材料是Zylon纤维,强度高,质量小[14]。仿真过程忽略了重力的影响,接触动力学的恢复系数设置为0.5[31-32]。柔性绳网和其他模拟参数均列于表2中。

图1 空间碎片初始状态Fig.1 Initial state of space debris
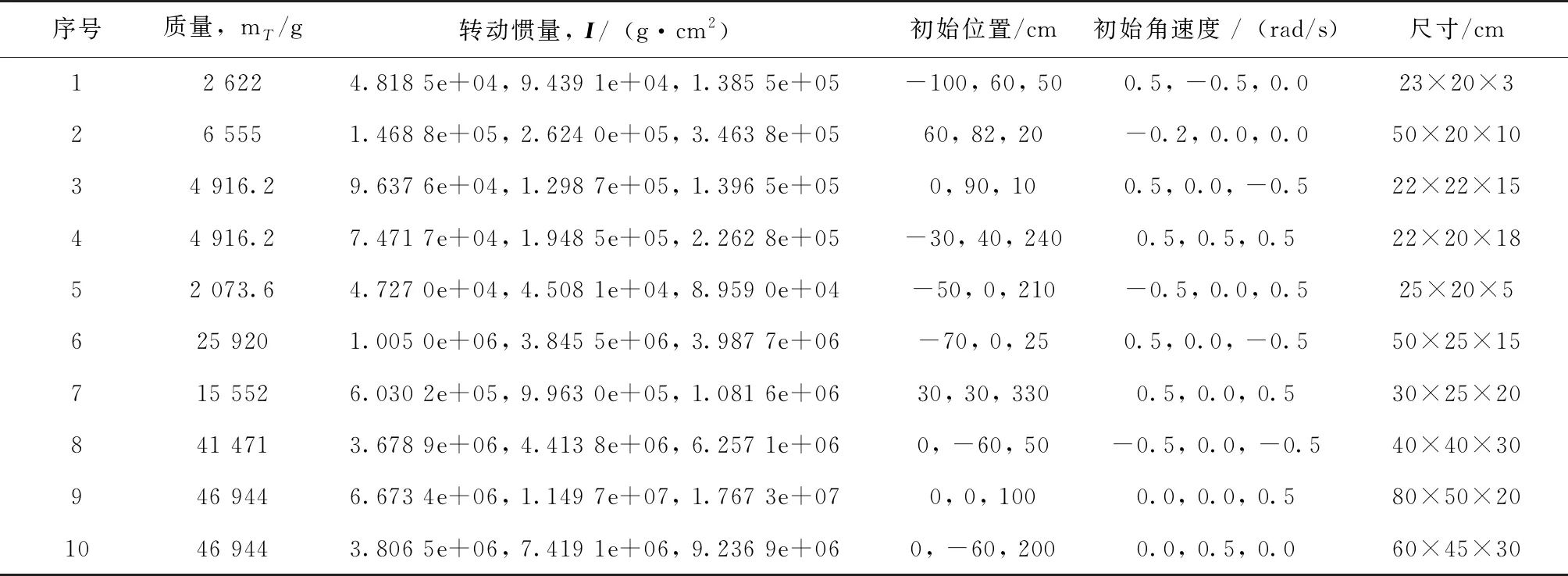
表1 多碎片初始参数
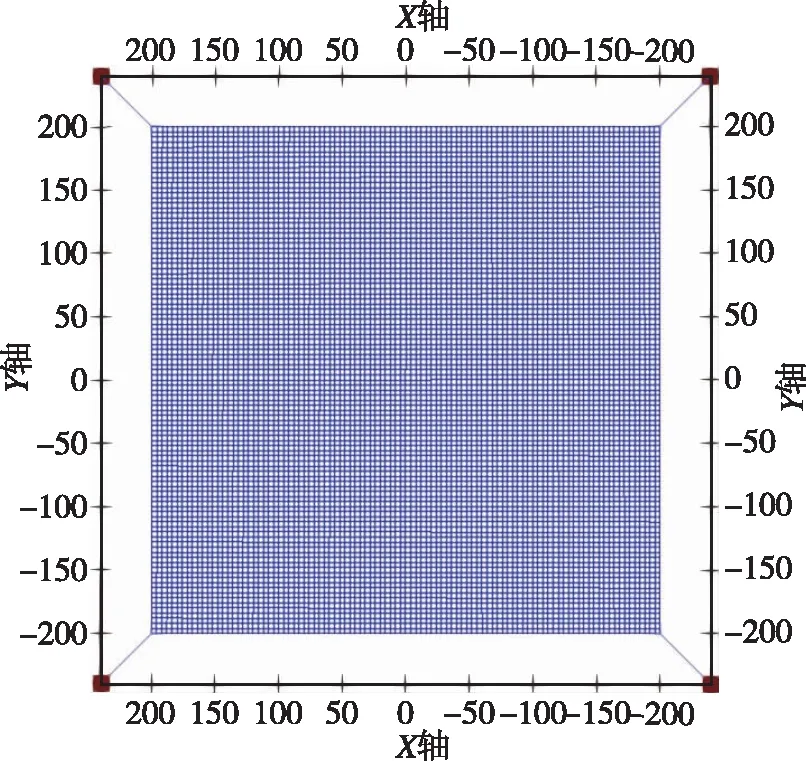
图2 空间柔性绳网展开图Fig.2 Space flexible net deployment diagram
2.2 评估捕获过程的关键变量
为了深入研究柔性绳网对空间多碎片的捕获能力,根据以下变量对捕获过程进行了评估。
1)绳网的最大拉伸力。绳网的最大拉伸力可用于反映柔性绳网的变形程度,进而评估绳网的安全性。
2)质量块的位移和速度。质量块的速度和位移可用于反映柔性绳网在捕获过程中的振动状态。
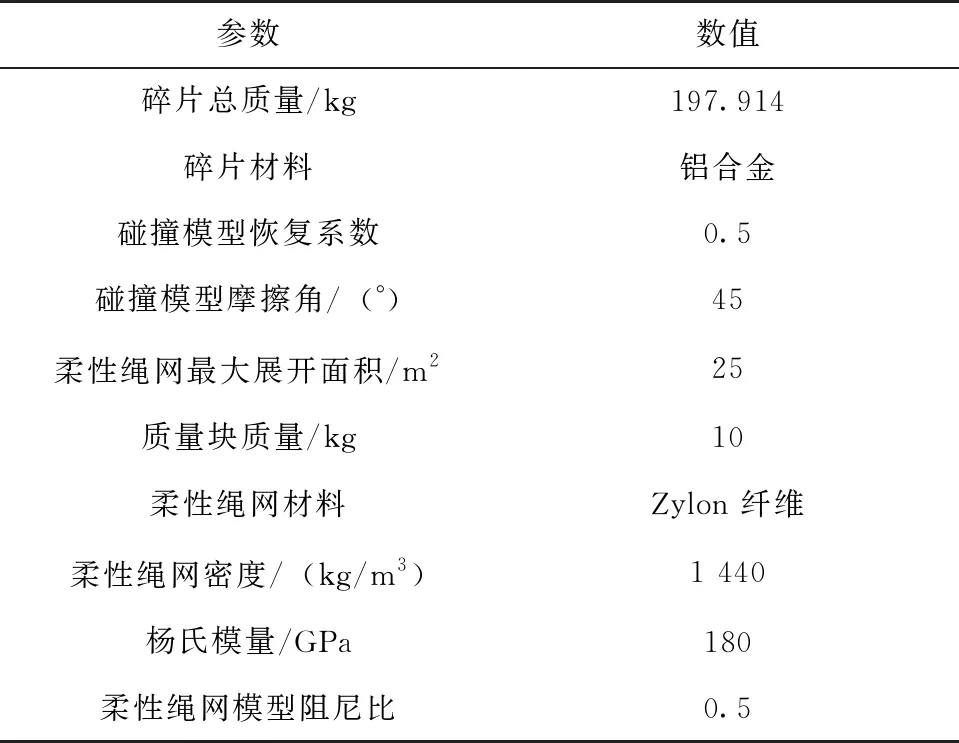
表2 多碎片捕获系统参数
3)碎片的位移、速度及角速度。碎片的位移、速度及角速度变化对于评估绳网包裹稳定性至关重要。
4)柔性绳网与碎片之间的接触力。柔性绳网和碎片之间的接触力是分析捕获过程的关键变量,可以反映碎片被抓捕后的状态以及绳网的安全性。
2.3 接触过程的模拟与分析
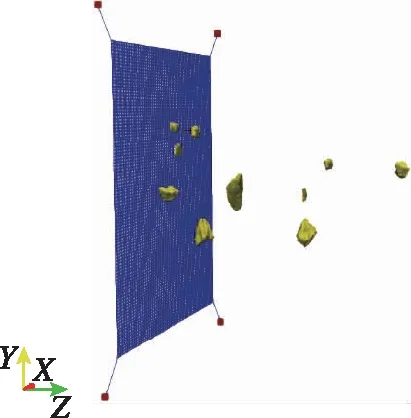
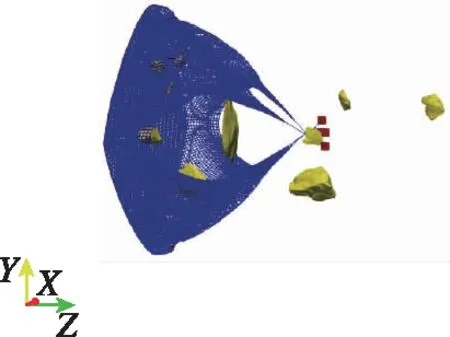
根据前文所述的动力学模型,对空间柔性绳网捕获多空间碎片的情景进行了仿真验证。具体场景描述如下:柔性绳网的每个质量块的初始速度为[0,0,10]cm/s,绳网的初速度为0 cm/s,每个碎片的初始旋转角速度约为0.7 rad/s。4个质量块在初始位置被抛出,从而抓捕碎片,捕获全过程如图3所示。
(a)0 s
(c)60 s
(d)90 s
(e)150 s

(f)200 s
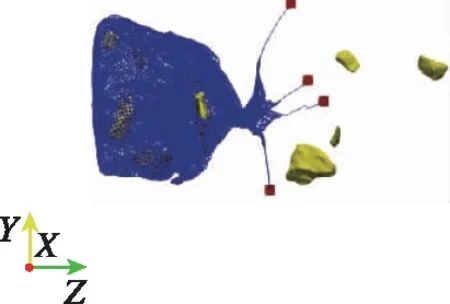
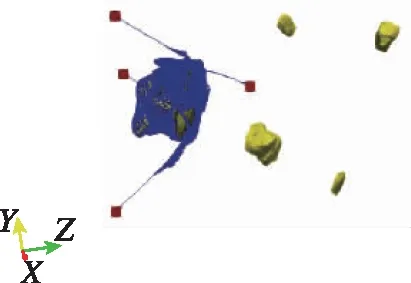
图 3(a)中显示空间绳网与多碎片的初始相对位置关系。图 3(b)至图 3(c)显示了柔性绳网逐步接近碎片的过程,可以看出绳网在质量块的牵引作用下缓步靠近碎片。图 3(c)至图 3(d)显示了柔性绳网接触碎片并且完成包裹的过程,柔性绳网与碎片之间的第一次接触发生在60 s左右。图 3(d)至图 3(e)显示了柔性绳网包裹碎片并且完成缠绕的过程,有6块空间碎片被绳网最终包裹缠绕,完成捕获。从图 3(f)可以看出绳网已经将6块碎片紧紧包裹,完成了第一次捕获任务。
图 4 为其中一个质量块的位移变化示意图。从图中可以看出,在柔性绳网与碎片发生接触的瞬间,即60 s左右,质量块的位移发生了突变,此时显示绳网与碎片已经发生了接触。
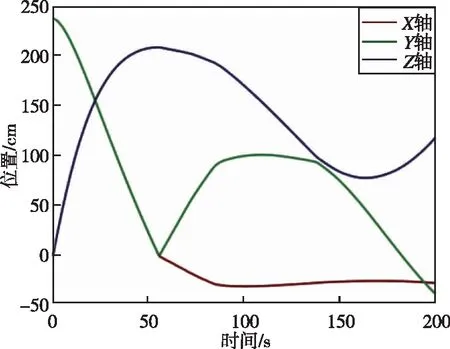
图4 质量块的位置变化曲线图Fig.4 Position change curves of mass block
图 5为其中一个质量块质心的速度变化示意图。从图中可以看出,在柔性绳网与碎片发生接触的瞬间,即60 s左右,质量块的速度发生了突变,在后续接触过程中速度一直下降。
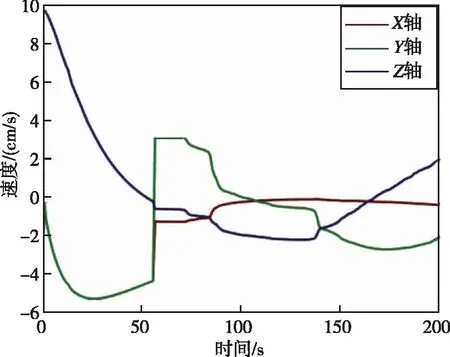
图5 质量块的速度变化曲线图Fig.5 Velocity change curves of mass block
图6(a)中粉色标注的碎片为被研究对象,其靠近空间绳网,转速较大,更容易反映碎片与绳网接触时的变形情况。从图6(b)中可以看出,碎片在与绳网接触前,一直在原地做旋转运动,在与绳网接触后,开始向前移动。在X与Y方向的转动几乎停止,仅在Z方向产生较大位移量。这种现象说明空间绳网可以适应一定转速的空间碎片。通过图3可以进一步看出,空间绳网对于多个旋转碎片也有较好的捕获能力,旋转的碎片并未影响绳网对其完成捕获缠绕。
图7为被研究碎片的速度变化曲线图。从图中可以看出,在柔性绳网与碎片接触之前,碎片一直在原地旋转,与柔性绳网接触后,碎片速度逐步降低,在200 s后,X与Y轴方向的速度已经降低至0 cm/s,反映出碎片在捕获后已经处于较稳定的状态。
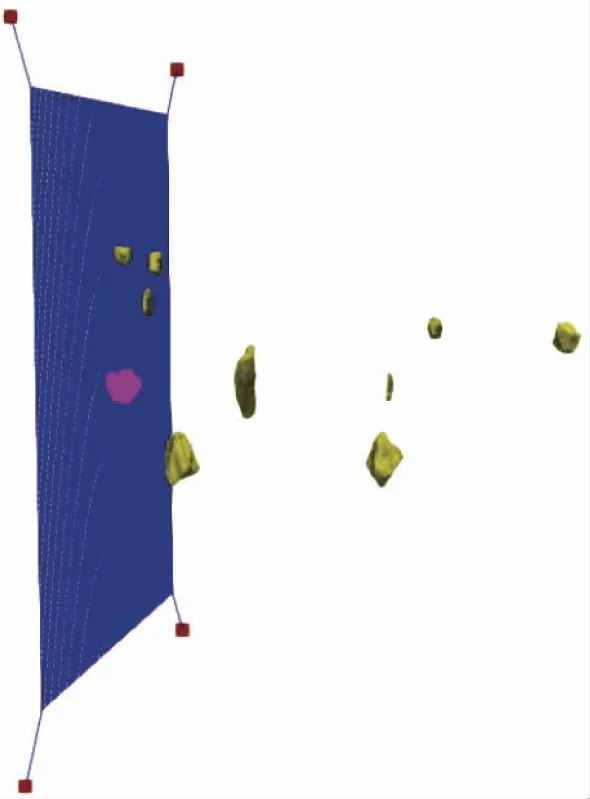
(a)粉色标记为被选中的碎片研究对象

(b)选定碎片的位置变化曲线图图6 碎片的位置变化图Fig.6 Position change charts of the fragments
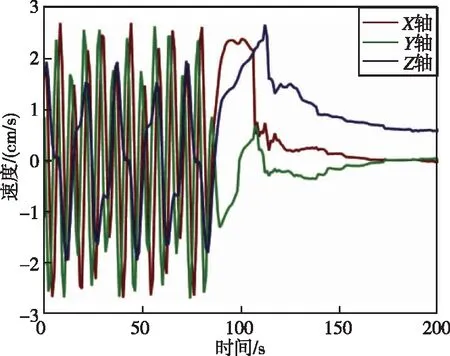
图7 碎片的速度变化曲线图Fig.7 Velocity change curves of the fragments
图8为被研究碎片的旋转速度变化曲线图。从图中可以看出,在柔性绳网与碎片接触之前,碎片一直在原地旋转,角速度大约为0.7 rad/s。碎片与柔性绳网接触后,碎片角速度逐步降低,在约200 s 后,碎片已经停止旋转,旋转作用被绳网消除。
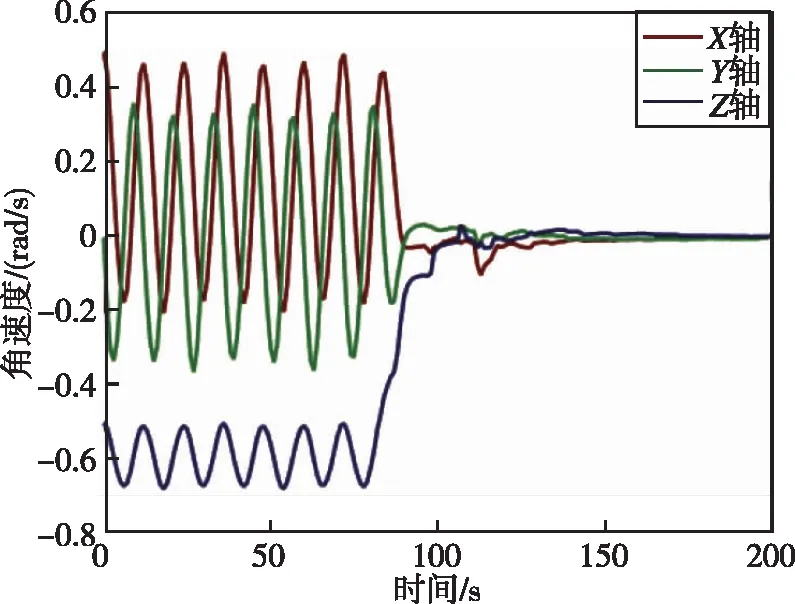
图8 碎片的角速度变化曲线图Fig.8 Angular velocity change curves of the fragments
图9为被研究碎片的接触力曲线图。从图中可以看出,整个捕获过程中,碎片受到的来自绳网的碰撞力小于1 N。这个现象说明,在捕获过程中,绳网受到的反作用力也较小,柔性绳网的安全性较高。另外也反映出碎片间的碰撞力也很小,不会造成二次撞击,形成更多的碎片。
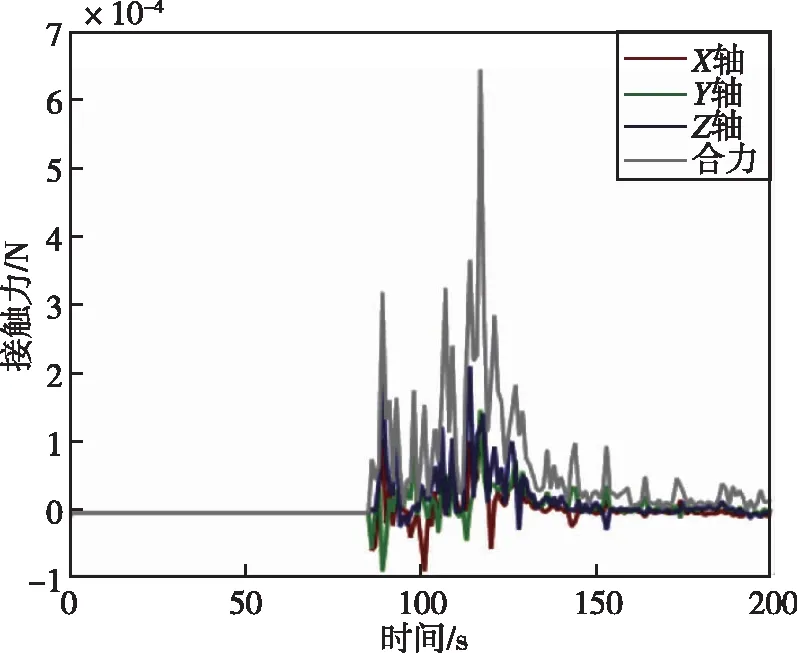
图9 碎片的接触力变化曲线图Fig.9 Contact force change curves of the fragments
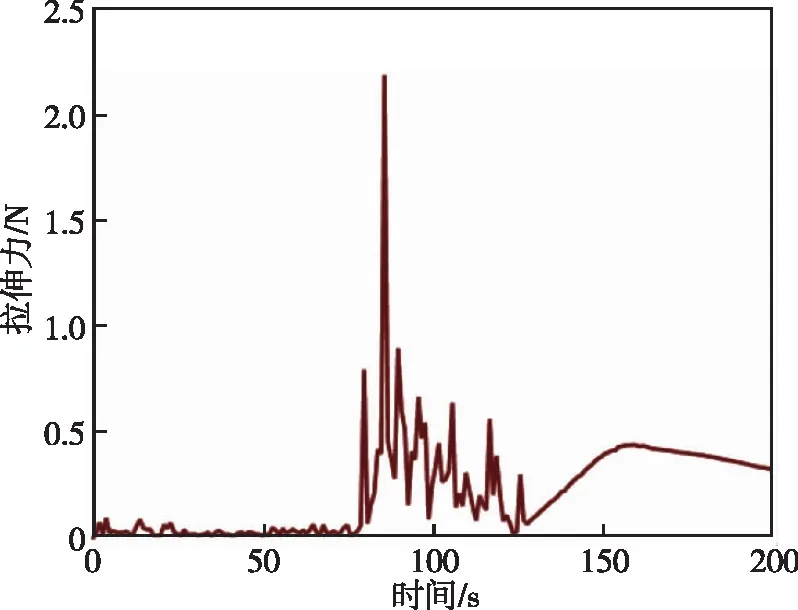
图10 绳网最大拉伸力曲线图Fig.10 The maximum tensile force curve of the net
图10为绳网中绳段的最大拉伸力示意图。从图中可以看出,整个捕获过程中,绳网内部最大的拉伸力小于2.5 N,小于绳段的最大允许应力值395.84 N,说明绳网在捕获过程中处于安全状态。图3~图10反映了柔性绳网在完成空间碎片捕获任务时具有较高的可靠性,碎片可以被绳网稳定包裹缠绕,从而达到进一步清理的目的。
3 结束语
通过构建柔性绳网和碎片动力学模型,验证了多碎片捕获过程。数值模拟表明柔性绳网具有可靠的捕获能力,柔性绳网可以捕获6个以不同角速度旋转的碎片,实现完整的包裹缠绕。对多碎片清理任务的仿真,发现空间绳网还可以适应具备较大转速的空间碎片,对于多个快速旋转移动的碎片同时捕获也有较好的适应能力。在捕获过程中,绳网受到来自碎片的反作用力较小,柔性绳网的安全性较高,多碎片间的碰撞力也很小,碎片间不会造成二次撞击,不会形成更多的碎片隐患。为实现碎片的全部捕获,将来会对柔性绳网的控制进行进一步研究。
