动力电池逆向物流网络多目标设计:风险优化与求解分析
2023-12-12范志强罗一帆梁宁宁李姗姗
范志强,罗一帆,梁宁宁,李姗姗
(1.河南理工大学 工商管理学院 能源经济研究中心, 河南 焦作 454003;2.河南理工大学 财经学院, 河南 焦作 454003)
0 引言
新能源汽车的发展带来了动力电池的退役问题,预计2030年动力电池年退役量将达到168万台,约84.8万吨[1]。面对如此大的退役量,如果没有一个有效的逆向物流网络进行回收,势必给经济运行和公众健康带来巨大威胁。
已有大量文献研究动力电池的回收问题,如动力电池回收策略[2-4]、回收技术[5-6]和回收模式[7-8]。其中,退役动力电池处理技术和回收模式决策方面的研究已经比较成熟,但动力电池逆向物流网络设计(electric vehicle battery reverse logistics network design,EVBRLND)的研究并不多见。已有的少量文献可分为单目标与多目标2种类型,其中单目标设计聚焦于经济性优化,如利润最大化[9-10]、成本最小化[11-12];多目标设计则在注重经济性的同时考虑了环境性和社会性,如碳排放量最小[13-14]、就业机会最大[14]、绿色绩效最大化[15]、社会负效应最小[16]。然而,现有研究仅将动力电池视作普通物资进行分析,未进一步分析其作为危险品所带来的风险,这显然不足以指导现实情况。动力电池本身属于第9类危险品,能量密度大,在回收、运输、检测、处置、梯次利用等环节均易发生自燃和爆炸等各类事故[17],根据国家应急管理部消防救援局的数据,在2022年,仅动力电池运输这一个环节就发生了40余起自燃或爆炸事故,给周边居民带来巨大的生命安全与财产损失风险。显然,从风险优化角度研究EVBRLND具有较大理论与现实应用价值。
其次,在现有的一般危险品物流网络设计研究中,通常将风险设定为确定性因素[18-20]和服从概率参数分布的不确定因素[21-22],这样的设定在EVBRLND研究中表现出相当的局限性和不可描述性,换言之,EVBRLND的风险优化并不能直接借鉴和套用一般危险品物流网络设计。当前动力电池回收过程的信息有限,很多条件和因素具有不确定性,比如无法准确预知各区域的电池回收数量,回收电池中有多少比例可以梯次利用和再生利用,各级设施处理能力应该有多大等,因此并不符合确定性特征。同时由于回收仍处于初期阶段,这些不确定参数并没有大量历史数据来用于概率分布统计研究,因此也不能用概率分布对其进行描述。不确定参数必须由专家们进行综合考虑后经估计得出,此时只需知道不确定参量的上下界与最可能值的三角模糊方法,为研究提供了新的手段。Hu等[9]、刘娟娟等[13]和Tosarkani等[15]分别用三角模糊方法来刻画EVBRLND中的不确定参量,但正如前文所言,这些文献的目标设计侧重经济、环境和社会,并未从风险优化角度进行研究。
同时,当前不确定环境下的EVBRLND研究多围绕回收数量和再循环比例2个不确定因素来展开[9,13],这是为了降低建模与求解难度,对现实问题做了简化处理。也有学者进一步考虑了设施固定成本以及运输成本这2个不确定性因素[15],但仍与现实情况存在较大差距。由于当前动力电池回收处于起步初期,信息有限,且未来几年将面临退役动力电池急剧增加的情形,各级各类设施可能需要新建或重新规划,因此开展包含电池回收价格、各级各类设施单位电池处理成本、运输距离等更多的,涵盖回收、运输、检测、处置、梯次利用等全过程的不确定因素在内的研究将更加符合现实需求。
此外,现有研究对动力电池的再生利用环节均做了简化处理[9-16],仅考虑单一处理技术工艺,这与现实情况存在一定差距,本文将在模型中进一步考虑到不同处理技术工艺对逆向物流网络设计的影响。
综上,现有EVBRLND研究取得了重要成果与进展,但在风险目标与不确定参数量化、逆向物流网络结构深化方面仍需要进一步研究,以此为基础构建多目标优化模型。同时,在求解方面,对经典的多目标优化MW方法进行改进,提高了求解质量与效率。
1 多目标规划模型
1.1 问题描述
研究退役动力电池回收全过程的逆向物流网络,退役动力电池回收流程如图1所示。退役动力电池从回收市场通过更换点运至检测中心,检测中心将电池拆解为电池模组,并对其进行质量等级检测及分类。根据电池性能衰退程度,可将电池模组大体分为2个梯度,对其进行不同的处理:
L1——梯次利用,对于可用容量处于30%~80%的电池,运往梯次利用中心,即再制造中心或储能中心,用于电动汽车服役场景和其他低端储能场景;
L2——再生利用,对于可用容量衰减至 30%以下的电池,运往处置中心。采取火法冶金或湿法冶金2种主流再生利用工艺,提取出有价值的金属和材料,之后应用于新电池生产中。
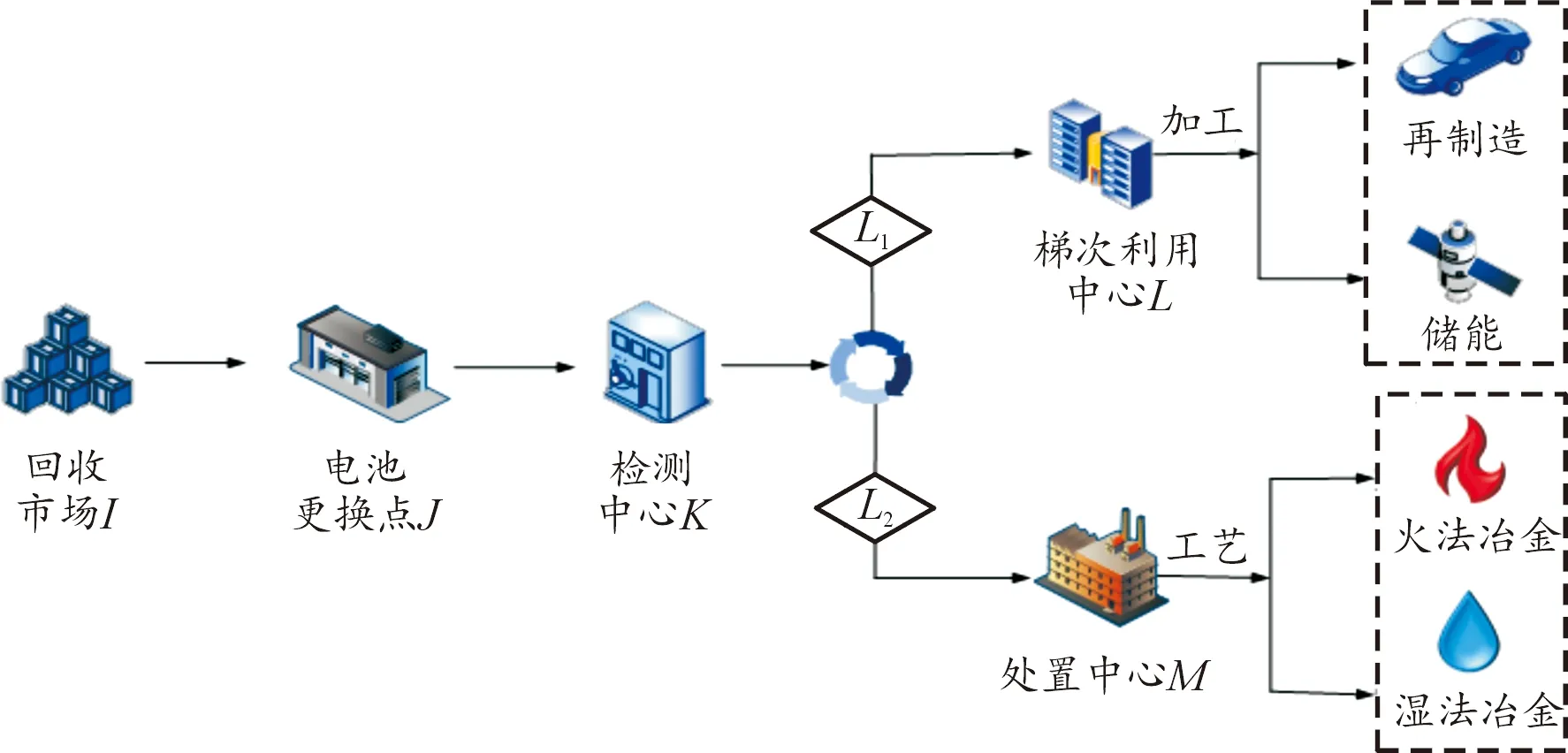
图1 退役动力电池回收流程
1.2 前提假设
为明确研究范围,在构建模型之前,设定如下假设条件:
1) 退役动力电池的运输费用与运输距离、运输数量相关;
2) 退役动力电池的逆向物流过程不存在跨级运输的情况;
3) 动力电池数量和暴露人口数量越多,风险越大;反之则越小。
1.3 符号说明
根据设定的建模背景,设置模型的集合、参数和决策变量如表1所示。
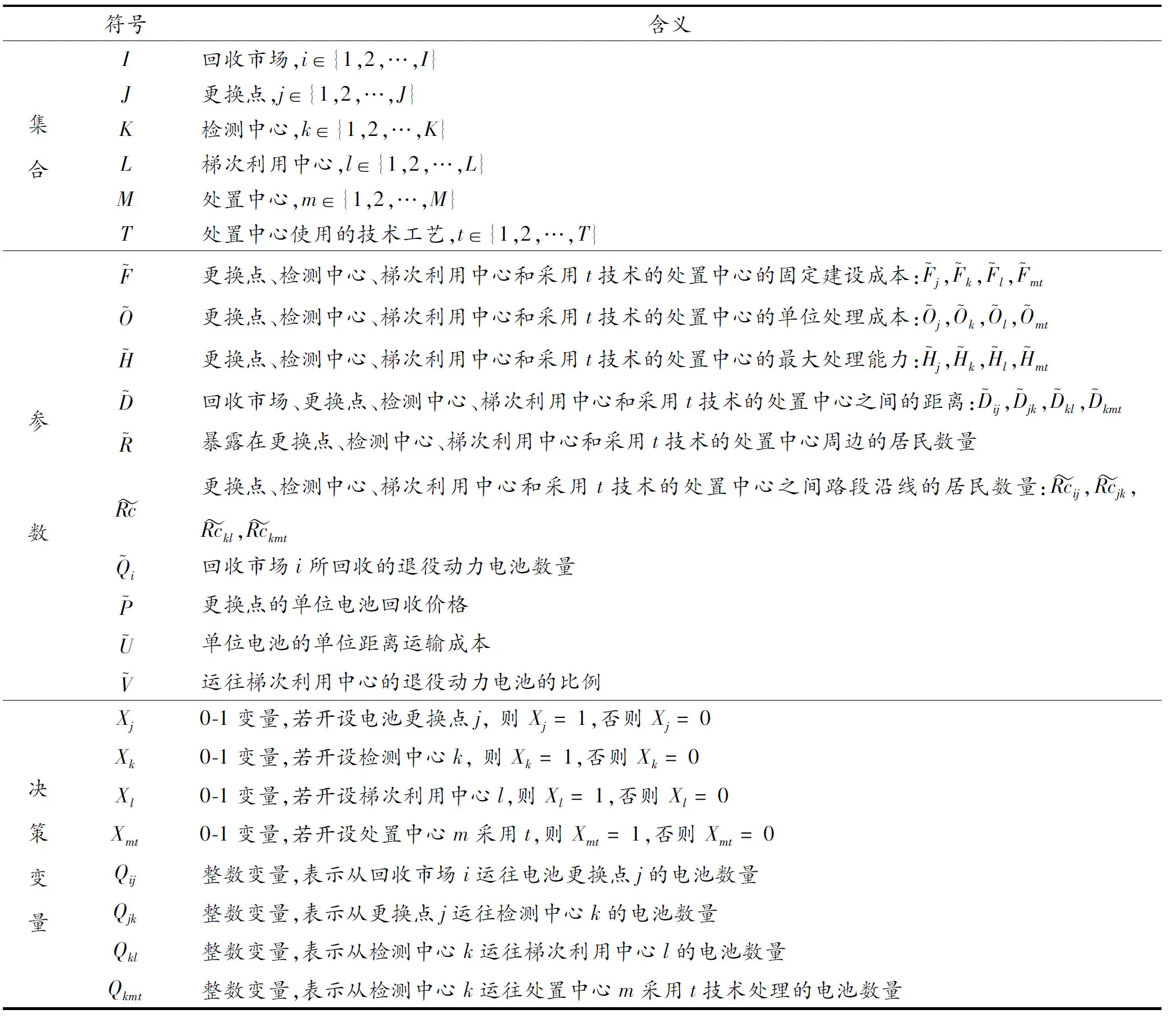
表1 参数符号及说明
1.4 模糊模型构建
以最小化逆向物流网络的总风险和总成本为目标,构建模糊多目标规划模型Ⅰ,如下:


(1)


(2)
s.t.
(3)

(4)

(5)

(6)
(7)
(8)
(9)

(10)

(11)
Qij,Qjk,Qkl,Qkmt≥0 且为整数,
∀i,j,k,l,m,t
(12a)
Xj,Xk,Xl,Xmt∈{0,1}, ∀j,k,l,m,t
(12b)
目标函数(1)为风险最小,包括各节点间的运输风险以及各级设施周围人群的暴露风险;目标函数(2)为运营总成本最小,包括退役动力电池的运输成本、设施固定建设成本、动力电池更换点对退役电池的回收成本以及各级设施的处理成本;式(3)保证回收市场的动力电池必须被回收;式(4)表示动力电池更换点前后的流量平衡;式(5)表示检测中心前后的流量平衡约束;式(6)表示梯次利用中心的处理量与回收量之间的关系;式(7)表示每一个处置中心最多只能选用一种工艺去处置退役动力电池;式(8)—(11)分别表示各级设施最大处理能力约束;式(12)对变量取值范围进行了定义。
1.5 模糊模型转化


(13)


(14)
s.t.
以及模型1中的约束式(4)(5)(7)(12)。
2 多目标优化求解
上述多目标规划模型的求解方法有很多,目前最常用的是模糊求解方法,如LH方法(即最大-最小法)、LZL方法和MW方法等。这些方法能够衡量各目标的满意程度,有助于决策者根据各目标的满意度和偏好,选择满意的最优解。其中,与LH和LZL相比,MW方法可使决策者在求解过程中控制搜索方向,加强决策者偏好与最优解的交互优化,从而成为应用最为广泛的方法。但MW方法也存在搜索空间过大、易忽视最小满意度目标、Pareto最优解重复过多且数量过少等缺陷。在此基础上,通过优化搜索空间、构建边际变化率MRC和新的转换函数予以改进,提出IMW(improved MW)方法以提高求解能力。IMW方法求解流程如图2所示。
求解步骤如下:
步骤1给定置信水平α,对于模型Ⅱ的2个目标,分别求解其正理想解(PIS)和负理想解(NIS)。



图2 IMW方法求解流程
步骤2确定2个目标函数的线性隶属函数:

其中,μh(x)(h=1,2)表示对第h个目标函数的满意度,该值越大,对该目标越满意。
步骤3IMW方法通过构建边际变化率MRC,为决策者提供两目标边际损益关系的量化数据,有助于决策者更好地选择调节目标与控制搜索方向,公式如下:

(22)
式(22)表示当目标h变化一个单位量时,目标g改变了多少单位量。风险目标和成本目标存在冲突,意味着当风险(或成本)提高一个单位增量时,成本(或风险)降低了多少单位减量。可分3种情况:① 0
步骤4将多目标模型Ⅱ转换为以下单目标模型Ⅲ。
1) MW方法中,转换函数为:

2) IMW方法构建新的转换函数:
maxZ=γλ0+(1-γ){θ1u1(x)+θ2u2(x)}
式中,λ0由步骤3决定,同时IMW方法将加权目标设定为θ1u1(x)+θ2u2(x),使得最小满意度的目标也可以进入加权目标,从而有利于更快地生成多目标均衡的最优解,提高寻得多目标均衡最优解的效率。
步骤5根据决策者的风险和成本偏好选取目标的权重系数θh和调节系数γ。如果决策者更加注重风险控制,则可增大风险目标函数满意度μ1(x)的权重θ1,反之则减少;调节系数γ则用于在调节目标和加权目标之间进行调节,当决策者更注重风险控制时,若λ0=μ1(x),则可增大γ,若λ0=μ2(x),则可减少γ。
步骤6依据设定的γ和θh值求解单目标清晰模型Ⅲ。若决策者对获得的解满意,则当前解为最优解,当前方案亦为最优方案,计算停止;否则继续根据决策者偏好调节α、γ和θh的值,转步骤1。
3 实验分析
3.1 算例描述
退役动力电池逆向物流网络有5个回收市场、4个电池更换候选点、3个检测中心候选点、3个梯次利用中心候选点、1个处置中心候选点,2种处理技术,α为0.9,γ为0.4,θ1为0.2,参数设置见表2。
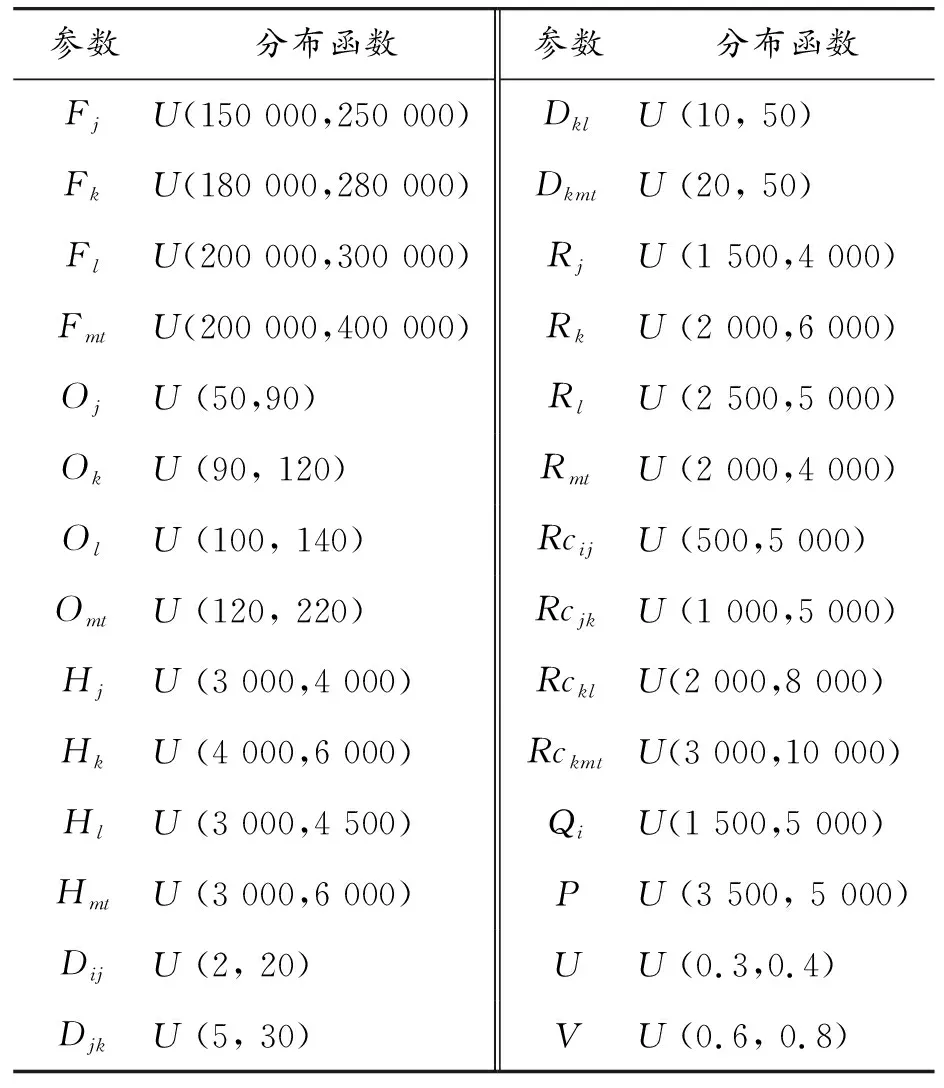
表2 参数设置
3.2 风险优化分析
对EVBRLND风险进行分析,设定θ1从0.2~0.8,步长0.2,共4组实验。图3给出了4组实验中风险与成本变化的情况。显然,风险与成本存在效益背反关系,随着决策者对风险控制的加强,风险逐渐降低,而成本则逐渐上升。对实验结果的进一步分析发现,随着θ1的增加,周边人口数量较少的设施与路段被更多地选中,但这类设施与路段的成本往往较高。因此,决策者可通过加大资金投入,在人群非密集区域建立设施,从而降低风险。

图3 风险与成本随权重系数的变化曲线
3.3 求解分析
3.3.1决策者控制求解的交互优化过程
对决策者控制IMW交互优化的核心过程进行分析,展示决策者如何通过MRC和调节系数控制并影响模型求解过程,从而选择合适的调节目标并获得满意方案,如表3所示。

表3 交互优化过程与结果
对3.1小节算例按照第2节中步骤1—3进行求解,可得边际变化率MRC12为0.11,符合第2节步骤3中的第1种情况,决策者可将风险作为调节目标。此时进入第1步交互,设定γ为0.1,可以观察到μ1(x)有所上升,而μ2(x)在下降,表明为了控制风险,牺牲了经济效益。如果决策者认为风险控制仍需加强,则进入第2步交互,γ更新为0.2,若决策者还不满意,可依次进入下一步交互。在第4步交互中,μ1(x)与μ2(x)相等,表明成本和风险目标已经相对均衡,若决策者满意可停止交互,输出当前最优解。此外,由表3还可以发现,非交互式优化(第0步)生成的解,决策者对风险和成本的满意度分别为29.44%和98.4%,2个目标是非常不均衡的,因此很难令决策者满意,而IMW的交互式优化求解更有利于决策者在不确定环境中找到相对均衡的最优解。
3.3.2Pareto最优解数量对比
为对比分析IMW与MW获得的Pareto最优解的数量,设定风险权重系数从0.1~0.9,步长0.1,共9组实验。各方法中,对于重复的最优解予以剔除,只保留不同的最优解。如图4所示,IMW除了与MW拥有共同的4个最优解外,还有3个最优解,即IMW获得了7个Pareto最优解,而MW获得了4个Pareto最优解,显然IMW获得Pareto最优解的数量要优于MW。

图4 IMW与MW获得的Pareto最优解分布
3.3.3交互优化效率对比
对IMW与MW的交互优化效率进行分析,采用RSD(range of satisfaction degrees)来评价风险目标与成本目标的均衡程度:
RSD=|μ1(x)-μ2(x)|
(23)
式(23)中,风险与成本2个目标满意度的差值即为RSD,显然RSD值越小,风险和成本2个目标越均衡。设定调节系数γ从0.1~0.9,步长0.1,共9组实验,图5给出了IMW与MW 2种方法的RSD变化情况。

图5 IMW与MW交互优化效率曲线
IMW决策者进入第4步交互(调节系数为0.4)时即可获得2个目标均衡的最优解,而MW则需要决策者进入第6步交互(调节系数为0.6)。显然,在相同条件下IMW的交互优化效率要高于MW。
3.3.4求解时间对比
对以上18组实验的求解时间进行分析,评价IMW与MW的求解效率。2种方法的求解时间平均值(mean)、标准方差(std)和最短时间(best)见表4,显然IMW的求解时间要好于MW。

表4 求解效率 s
3.4 大规模实验
为进一步验证模型与方法的有效性,设计8组测试算例,每组算例分别由“权重系数从0.1~0.9(步长0.1)”9个算例,以及“调节系数从0.1~0.9(步长0.1)”9个算例组成,即每组共18个具体算例,8组共144个具体算例。每组算例分别运用IMW与MW 2种方法求解,求解结果见表5。其中,“Pareto最优解数量”一列由各组的“权重系数从0.1~0.9(步长0.1)”这9个算例得出,统计2种方法所得到的Pareto最优解(不允许重复)数量;“交互优化效率”一列由“调节系数从0.1~0.9(步长0.1)”这9个算例得出,以“RSD不超过3%”为停止交互准则来统计2种方法达到此准则所需的交互优化步数;“求解时间”一列为该组18个算例求解时间的平均值。
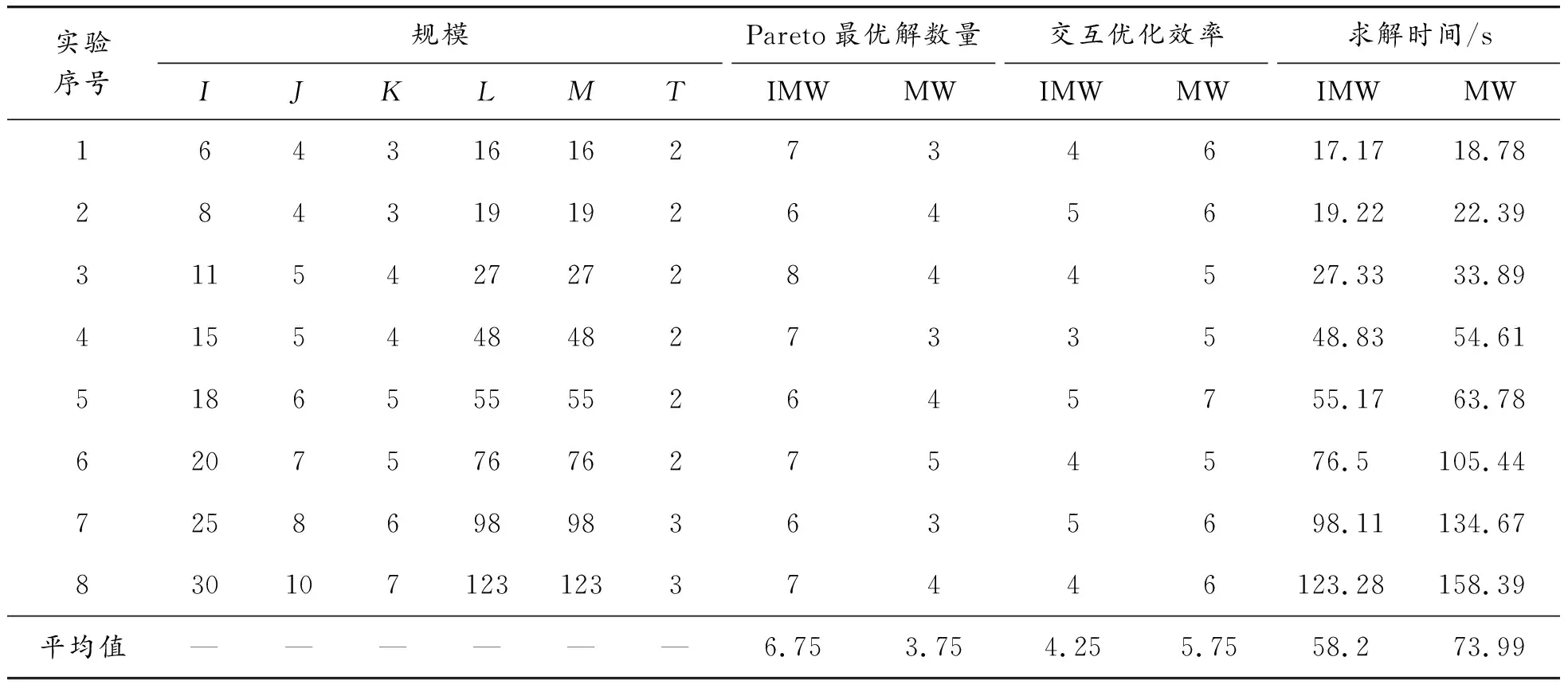
表5 大规模实验求解结果
从表5可知,得益于搜索空间优化、边际变化率与新转换函数的构建,IMW在Pareto最优解数量、交互优化效率和求解时间方面均优于MW方法。具体来看,IMW获得的Pareto最优解数量的平均值为6.75,要高于MW的3.75;IMW平均4.25步即可获得两目标相对均衡的满意解,而MW则需要5.75步;IMW的平均求解时间为58.2 s,要优于MW的73.99 s。此外,还可以得出,随着问题规模的增大,IMW和MW的求解时间均有所增加,在第8组实验中两者求解时间达到最大值,分别为123.28 s与158.39 s。考虑到模型有很多约束,这样的求解时间是可以接受的,同时得益于1.5小节的模糊模型转化,对模糊目标和模糊约束做了等价清晰的线性化处理,使得模型可以在可接受时间范围内有效解决大规模EVBRLND优化问题。
4 结论
从动力电池逆向物流网络规划初期的高度不确定性出发,考虑成本最小化和风险最小化,建立多目标规划模型。运用期望区间、期望值和模糊机会约束方法对模型进行确定性转化,设计了IMW方法求解模型。创新之处在于,一是运用三角模糊方法量化EVBRLND风险不确定参数,同时结合再生利用的多处理技术工艺特点,构建了考虑风险优化的模糊多目标模型,弥补了当前EVBRLND问题研究中未考虑风险与全过程不确定因素的不足;二是对经典的MW方法,从优化搜索空间、构建边际变化率MRC和新转换函数3个方面予以改进,并通过算例验证了IMW方法在Pareto最优解数量、交互优化效率与求解时间方面的优越性。此外,动力电池逆向回收再利用过程还会受到前端正向物流(动力电池与新能源汽车的供产销)的影响,将其纳入研究范畴形成的闭环物流网络设计将是下一步研究的方向。
