基于实时车流信息的电动汽车未来行驶工况预测
2023-12-12黄韬一刘寅童
张 毅,黄韬一,刘寅童
(1.重庆理工大学 车辆工程学院, 重庆 400054; 2.重庆长安汽车股份有限公司, 重庆 400020)
0 引言
汽车是一种便利高效的交通工具,如今在人们的生活中已不可或缺。传统燃油车对燃料的需求造成了棘手的能源危机,各种尾气的排放也引出了环境污染等问题。而电动车等新能源汽车则是解决这些问题的主要手段[1]。但由于不能精确地预测车辆的未来能耗与剩余行驶里程,导致新能源车厂选择保守的整车能量管理策略[2],同时也加剧用户的里程焦虑。针对此问题,目前出现了许多针对电动车未来能耗的预估方法。林仕立等[3]进行基于SOE (state of energy)的纯电动车剩余行驶里程预测,相较于传统SOC (state of charge)的预测方法,预测精度可以提升4.09%。刘光明等[4]将电池容量估计和能耗预测结合,利用纯电动汽车相关测试数据和基于最小二乘法的能耗估计公式,得到预测的剩余续航里程。Rodgers等[5]使用多元回归方法分析出车辆行驶速度、环境温度、交通状况等因素与能耗变化之间的关系,然后根据车辆历史能耗数据预测未来能耗值。Pan等[6]提出基于工况识别与预测相结合的电动车行驶里程估计模型。该模型基于核主成分特征参数和模糊算法对驾驶工况进行识别,以建立特征参数与能耗之间的模糊关系,进而利用马尔可夫和神经网络算法预测未来车辆的行驶工况。Yu等[7]使用基于聚类分析的车辆行驶状态识别方法,确定车辆行驶能耗需求,在空间域内将行驶道路分割成若干小的行驶片段,并根据交通状况、道路信息及驾驶行为特性等对各区段内的车辆行车状态进行状态识别,进而预测各段能耗需求。Lee等[8]基于大数据理论,利用聚类算法分析不同驾驶模式下的能量效率,再结合动力电池的老化模型,较高精度地估计纯电动车的SOC与行驶里程。
现有研究仍有较大的改进空间。首先,现有研究并未充分考虑到实时车流状况对能耗的影响。其次,现有实验验证大多基于理想情况下的假设条件,并没有进行真实车辆道路实验验证。这导致其数据过于理想化,缺少实际可行性。基于以上不足,为精确且稳定地预测车辆的未来行驶工况,本文基于百度地图API (application programming interface)接口的实时车流信息和实车OBD (on-board diagnostics)获取的单车历史行驶数据,建立了一个基于机器学习的车辆行驶工况预测模型,并使用实车在环平台进行实车路试实验。
本文提出的预测算法流程如图1所示。其中,实车在环平台中测试车辆所获取的单车行驶数据(见1.4节)与百度地图API所提供的车流数据(见1.5节)在被预处理和特征参数提取后,将在云端服务器中用以离线训练机器学习预测算法。通过EM (expectation maximization)聚类分析,将历史行车数据分成8种典型行驶工况(见2.1节),并用于训练RBF (radial basis function)分类器(见2.2节)。最后,利用训练好的RBF分类器根据百度地图API提供的实时车流信息,以预测汽车的未来行驶工况类型及其平均能耗,从而得到未来SOC(即剩余续航里程)的变化趋势。

图1 基于百度地图API的车辆行驶工况预测算法流程
1 实车在环实验平台
1.1 车联网与云计算
传统车载控制器的计算能力与存储空间无法满足实时运行车辆未来工况预测算法的需求。本研究使用云端服务器作为计算与通信中枢,如图2所示。云端服务器存储着通过车载OBD获取的单车数据,以及通过百度地图API接口获取的实时车流信息。这二者共同作为历史数据,用于离线训练基于机器学习的云端预测算法。在实车实验中,云端服务器使用离线训练完成的机器学习预测算法,并根据百度地图API提供的实时车流信息,对未来行驶工况进行在线预测。
1.2 实车在环设备
本实验使用长安逸动纯电动汽车作为在环车辆。如图3所示,实验中涉及的车载硬件子系统包括:USB转CAN接口卡,笔记本电脑,GPS模块。实车在环相关实验设备如图4所示。测试车辆的具体参数见表1。
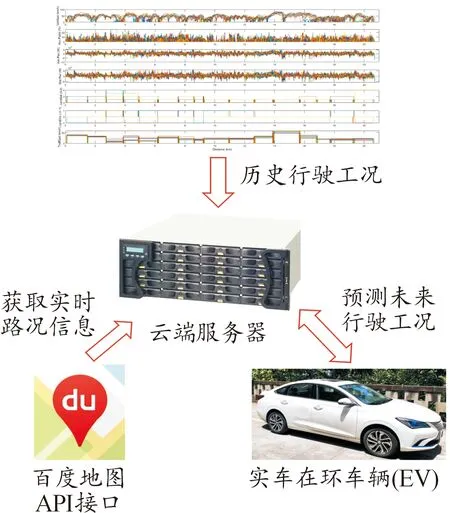
图2 云数据处理示意图

图3 上路测试车辆
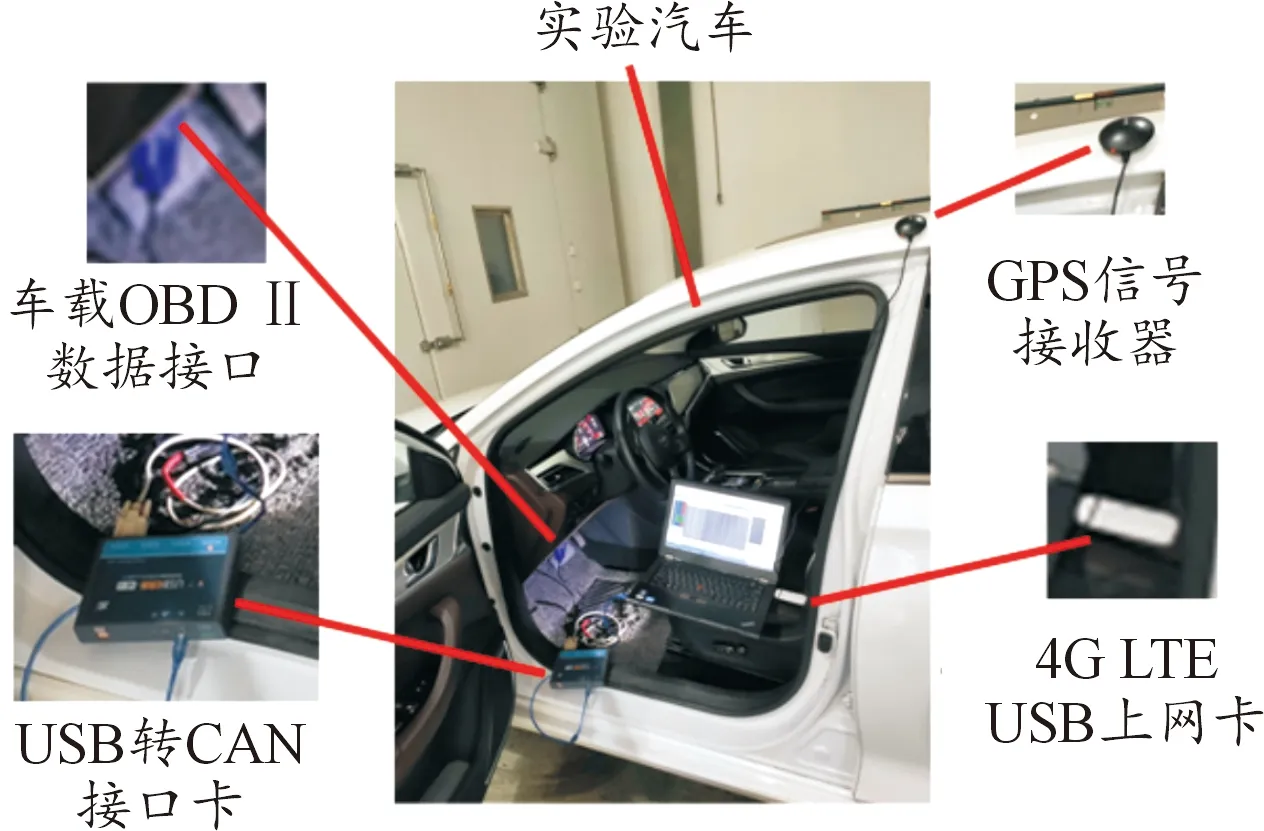
图4 实车在环相关实验设备

表1 测试车辆参数
此外,本文在汽车OBD通信协议的基础上设计了一套能够读取车载OBDII接口数据的软硬件系统[9]。通过USBCAN-4E-U接口卡与车载CAN总线进行数据交换,读取车辆行驶状态相关数据(即单车数据),并通过4G LTE (long term evolution)网络实时上传到云端服务器并作为历史数据,建立一个未来行驶工况的预测模型。数据的具体情况在1.4节中介绍。
1.3 电池仿真模型
测试车辆(长安逸动)自带的电池系统的SOC检测仅精确到个位数,无法满足本文的实时预测算法的精度需求,故在云端建立了一个电池软件仿真模型,根据实车OBD的驱动功率,实时计算电池SOC的变化量。如图5所示,电池等效电路模型为一个经典的内阻模型。图中,电池开路电压Voc(V)和等效电阻Rin(Ω)均为SOC的函数。

图5 电池等效电路模型
Voc和Rin的具体参数使用的是某型号磷酸铁锂电池的实测参数[10],如图6所示。
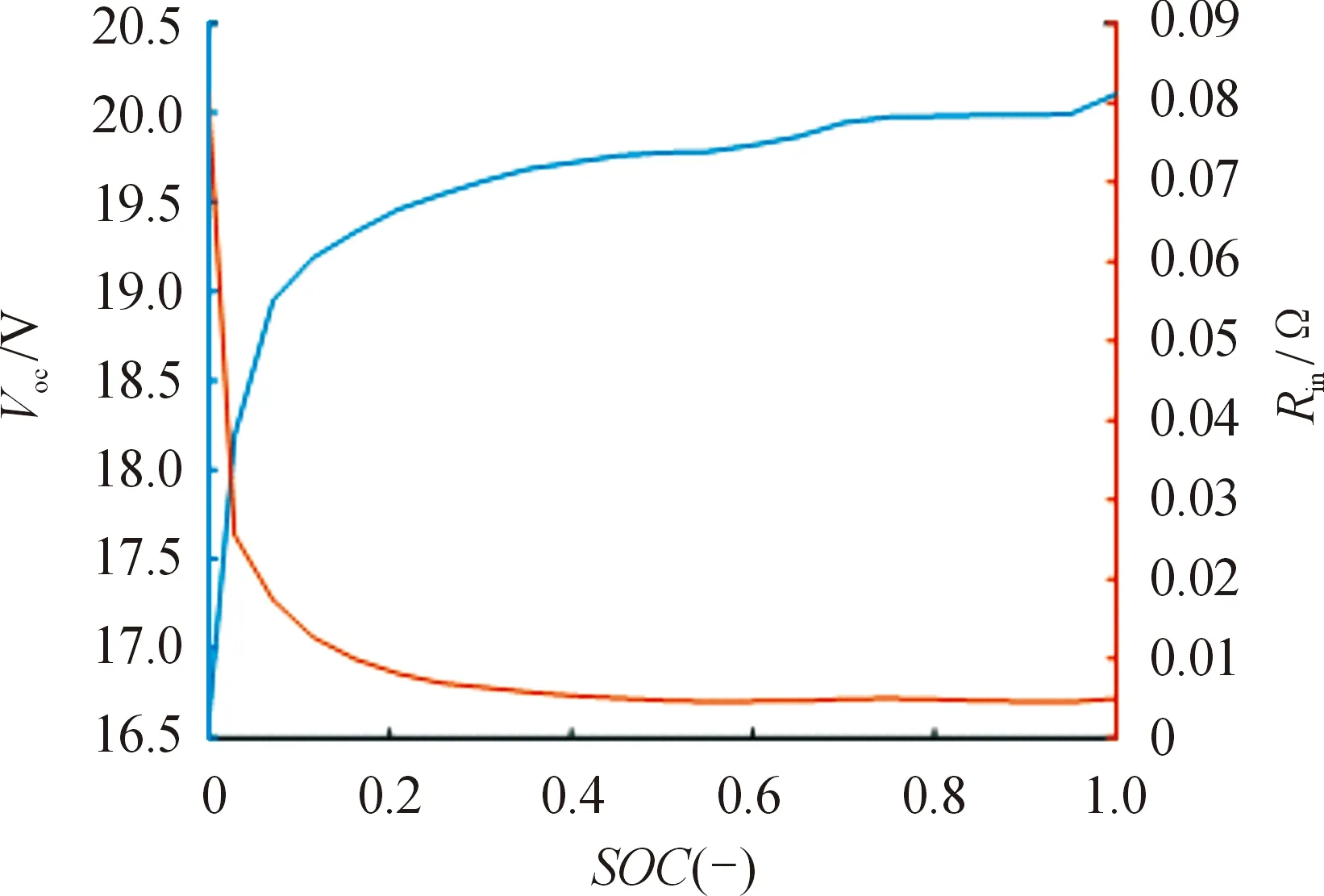
图6 电池开路电压与等效内阻
根据图5中的模型和图6中的Voc和Rin的数据,使用安时法即可求得ΔSOC[11]:
(1)
式中:Qbattery为电池电量,即电池额定容量,Ah;Pbattery为电池输入的电功率,W,根据车辆驱动功率算得,计算过程的解释参见文献[11]。Pbattery正为放电,负为充电。
1.4 行驶路径与历史数据采集
本文主要研究在预定路线上行驶的车辆,如通勤交通和公共交通,故需要先规划好实验路径。为方便实验,选取了学校附近的一段约20.6 km的闭环路段,包括红光大道(1、2、16)、渝南大道(3、4、5、6)、学府大道(7、8)、南滨路(9、10、11)、巴滨路(12、13、14、15)。具体线路如图7所示。此行驶路径路况相对复杂,包含非常通畅到严重拥堵等各种路况,可确保本实验结论对于不同行驶工况都具有普适性。

图7 道路测试的行驶路线
通过实车行驶实验,从行驶路线中收集若干历史行驶数据。数据采集时间为下午17∶30左右的典型下班高峰时段。为了减少驾驶员的驾驶习惯对所记录数据的影响,在保障安全和遵守规则的前提下,驾驶员被要求尽可能地跟随车流行驶。为优化数据处理过程,增加数据的可靠性与稳定性,笔者根据路径中的地理特征(如十字路口和红绿灯),将行驶数据分割分为16个路段,即文献[12]中的“微行程”。一组良好分割的“微行程”可以简化数据处理,并增强其鲁棒性。
实车采集的行驶数据包括车速、油门开度、整车功率和电机功率(见图8)。为方便后续进行聚类分析,需要对历史数据提取特征值和筛选数据。提取出的特征参数如表2所示,将作为后续聚类分析的样本数据。

图8 OBD单车行驶数据记录

表2 来自车辆OBD接口的特征参数
1.5 百度地图API
百度地图Web服务API为开发者提供了http和https接口。开发者可以通过http/https形式发起检索请求,用以获取以json或xml格式的返回的包含相关车流信息的检索数据。本文中车流信息数据的收集主要使用到了百度地图API中的实时路况查询服务(Traffic API)和批量算路服务(RouteMatrix API)。其中,前者提供了表3中的第1、2行数据,即拥堵状况与拥堵方向;后者提供表3中第3行数据,即车流平均速度。
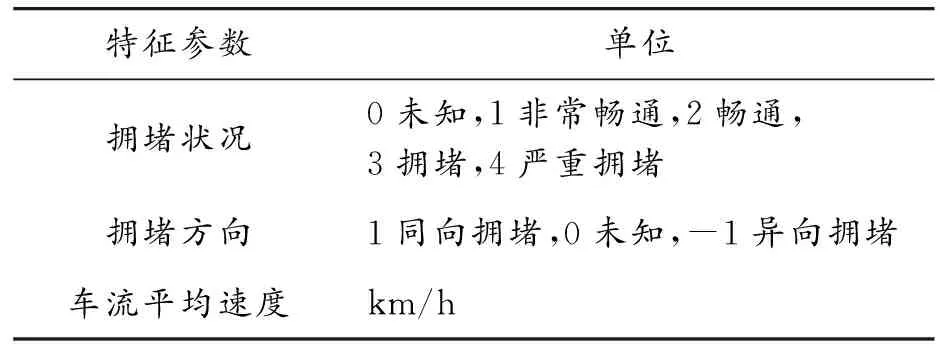
表3 来自百度地图API的特征参数
实时路况查询服务用于查询指定道路或区域的实时拥堵情况和拥堵趋势。拥堵状况大致有未知、非常畅通、畅通、拥堵、严重拥堵等。若出现拥堵,则可用拥堵方向来判断是否影响此次的采集数据(若同向,则影响;若反向,则无影响)。百度地图API车流信息如图9所示。
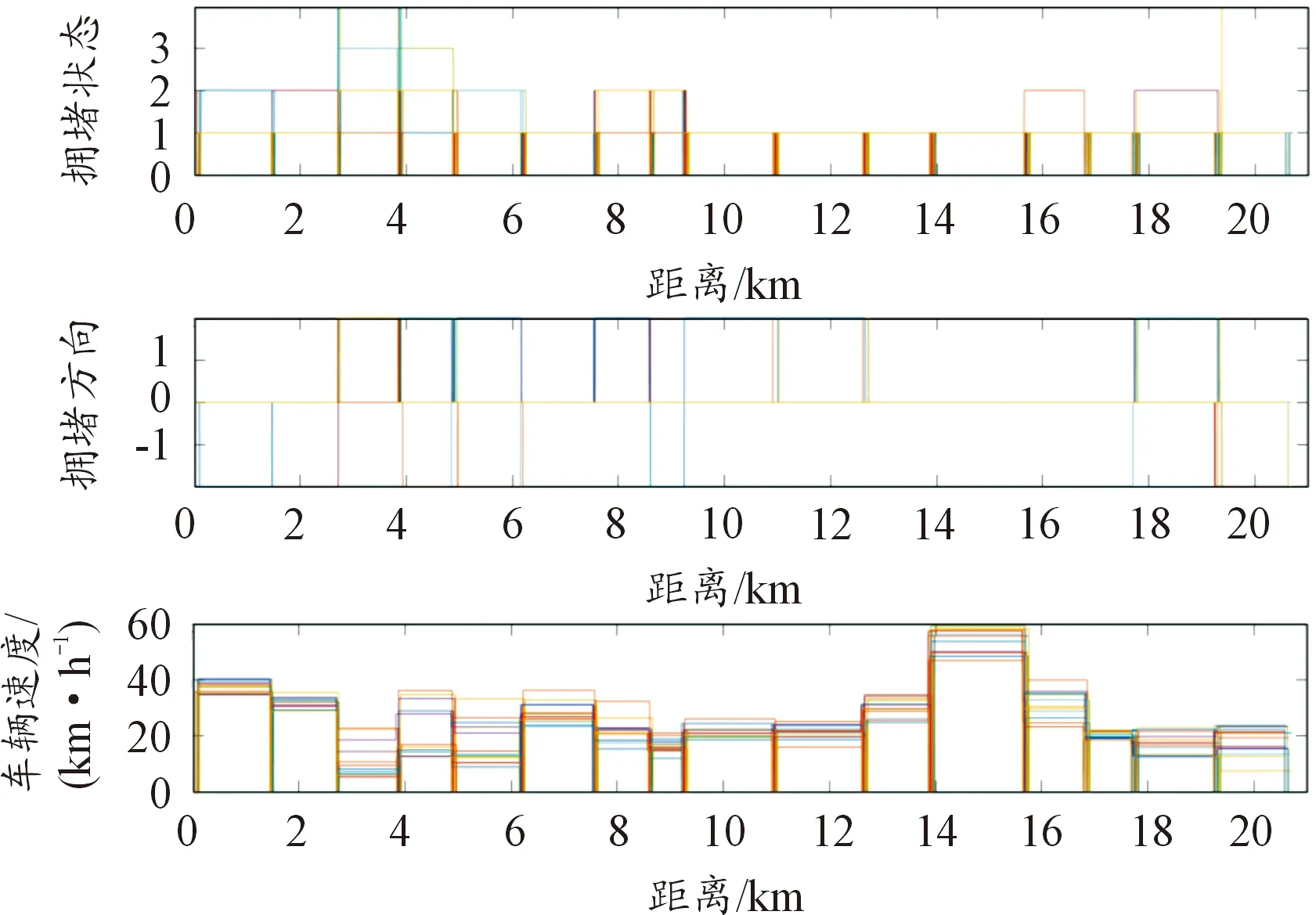
图9 百度地图API车流信息
批量算路服务可以根据起点和终点坐标计算路段行驶距离并预测行驶时间。表3中的车流平均速度由路段行驶距离除以批量算路服务提供的预测行驶时间得到。车流平均速度代表车流通过某路段的平均速度,并且包括了停车等待时间。而实车OBD的特征参数数据中的平均速度则不包括停车等待时间。因此车流速度会略慢于实车OBD中的平均速度。利用这些数据,可以获取相关道路的车流信息,包括拥堵相关情况与车流平均速度情况。
本章介绍了云端服务器与实车在环实验平台的搭建过程,以及从规划的行驶路径中采集的实车OBD单车数据和从百度地图API中获取的车流信息。这两者一并作为历史数据,经预处理后上传至云端服务器。将用其训练后续章节中介绍的机器学习预测算法,以此达到预测未来行驶工况的目的。
2 预测算法
2.1 EM聚类分析
本文基于百度地图API车流数据与实车OBD行驶数据,应用EM算法[13]对其进行聚类分析。根据表2和表3数据中具有代表性的特征参数,EM算法将其微行程数据通过聚类分析分成8种行驶工况,以此来反映汽车的行驶周期行为。EM算法类似于K-means算法[14],都是通过对迭代过程的模型进行优化来寻找最优的聚类方式,但K-means使用欧几里得距离来测量2个数据样本之间的距离,而EM则采用统计方法。有2种方法可以从EM算法中得到K-means算法:其一是将聚类方差取极限值为零;其二是假设方差足够小,相比簇与簇之间的距离可以忽略不计。而本研究使用的EM算法具体如下。
首先,在n维样本空间χ里,假定x=(x1,x2,…,xn)为随机向量,表示表2和表3中百度地图API与车辆OBD数据的特征参数向量。若x服从高斯分布,则其概率密度函数为
(2)
式中:μ是n维均值向量;Σ是n×n协方差矩阵。
其次,如果EM将样本数据通过聚类分析分成k组,即C={C1,C2,…,Ck},则可以定义一个高斯混合分布
(3)
然后,如果样本集合D={x1,x2,…,xm}表示图8和图9中的历史样本数据,那么后验概率定义xj∈cj定义为
(4)
最后,本文采用的EM聚类分析算法具体描述如下。
1) 初始化:输入混合高斯分布的模型参数{(αi,μi,Σi)|1≤i≤k}
2) E步,根据式(3)计算每个混合高斯分布的后验概率,即
γji=pM(zj=i|xj)=1≤i≤k)
(5)
3) M步,计算混合高斯分布的新参数如下
(6)
新协方差矩阵
(7)

(8)
4) 更新模型参数,重复2)3)直至聚类结果收敛。
5) 输出:各样本xj通过聚类分析归入相应的簇
(9)
算法中选择的聚类类型Cλj是按照最大后验概率γji来选择的。
基于以上特征参数,以路况的拥堵情况和能耗的高低为参照,将图8和图9中的历史驾驶数据最后聚成8类,设定k=8时,代表性最为典型,其聚类分析结果如图10所示。聚类完成后,从中选取2个最具有代表性的特征参数,平均能耗和平均时耗来描述聚类分析的结果,如图11、图12和表4所示。
聚类分析所得的结果,是具有子工况标签的样本的特征参数,将用来训练后续的RBF神经网络分类器。
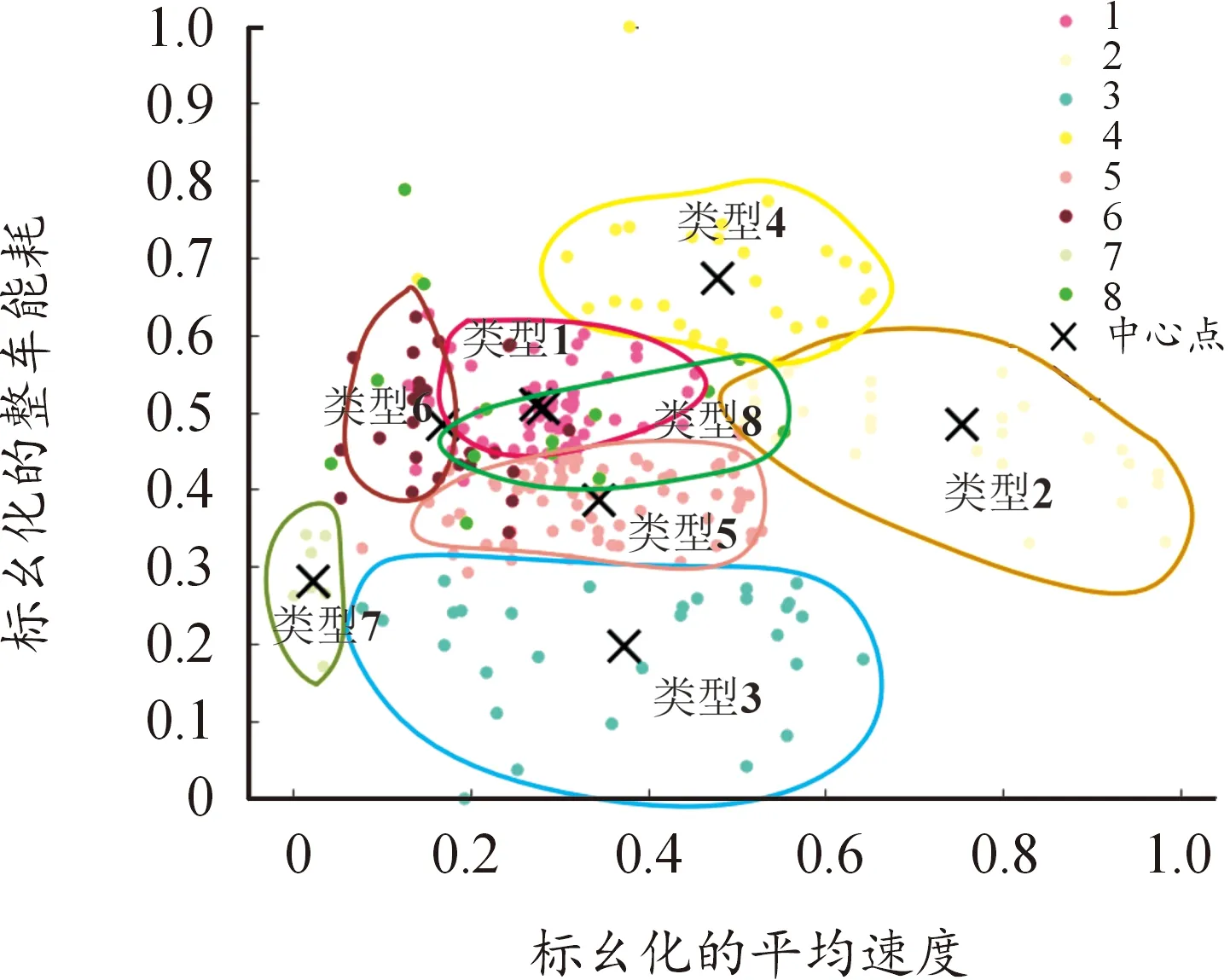
图10 子工况类型聚类分析结果

图11 子工况能耗概率分布直方图

图12 子工况时耗概率分布直方图
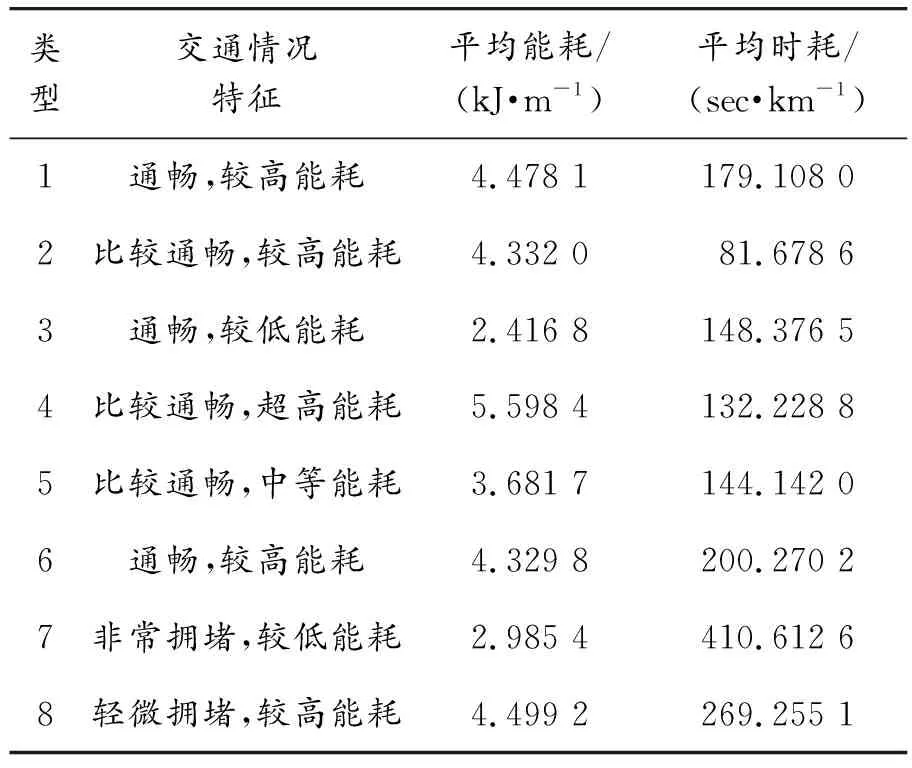
表4 交通情况特征的匹配
2.2 基于RBF神经网络的数据分类器
在2.1节中,EM算法将历史驾驶数据分为8个子类型。本节使用聚类后的各个样本数据中的百度地图API中的特征参数(即交通状况、车流方向、车流速度),及其对应的子工况类型来训练RBF神经网络[15]。完成训练后,RBF网络可以使用百度地图的车流信息在线对各路段的未来行驶状况进行分类,其分类结果可作为预测的未来行驶状态。
图13表示的RBF神经网络是一个3层结构的局部逼近网络。神经元作为分布点的输入层由表3中微行程数据的特征参数表示。隐藏层使用类高斯径向基函数(Rj(x))作为激活函数:
(10)
式中:x=(x1,x2,…,xN)是表3中的特征参数的输入层的输入向量,表示百度地图API的特征参数向量;Cj是隐藏层中第j个RBF神经单元的中心向量;σj是这个单位的半径。而输出层使用隐藏层结果的加权和作为子条件i的输出信号。
(11)
式中:ωij是隐藏层中第j个单元与输出层中第i个输出之间的链接权重;ωi是第i个输出的位移。 最后将输入数据x分类为子条件ε,得到最高的输出yi如下:
(12)
式中,ε是最高输出的簇标签,代表车辆的交通情况特征。

图13 N输入、H隐神经元、K输出的RBF网络
本节介绍了RBF网络分类器的使用过程。车辆在行驶前,通过百度地图API获取实时车流信息,即表3中的交通状况与车流方向和速度。完成训练的RBF网络根据实时车流信息,对各路段的行驶状态进行分类预测,进而获得未来行驶工况。根据RBF网络给出的分类结果(即未来行驶工况的类型),同时参考图11和图12中能耗与时耗的数学期望,以及表4中交通情况特征的描述,即可预测得到车辆未来行驶工况的子类型及其平均能耗与时耗。
3 实车上路实验
3.1 实验条件与背景
通过实车上路试验,以验证本文提出的在线预测算法的准确性。为保证实验的可靠性,所采取的实验路线与采集历史数据时的路线保持一致,如图7所示。测试车辆于下午17∶35出发,为下班高峰期。行驶路线中的渝南大道(3、4、5、6)通常会出现严重堵车,而南滨路与巴滨路(9、10、11、12、13、14、15)的路况则相对通畅。实验包含多种类型的工况数据(如拥堵工况与通畅工况),此布置能满足实验对数据多样性的需求。本实验路段全长20.6 km,行驶时间大约50 min,因此SOC设置为0.7,保证电量的充足以满足行驶需求。实验条件总结如表5所示。
表5 实验条件参数
3.2 实验结果分析
图14为实车路试实验的结果数据,包括通过云端服务器记录的实车数据和对应的预测数据。因为本实验使用的是纯电动汽车,其SOC变化量直接对应着整车能耗水平,所以本文用SOC变化趋势表征整车能耗,包括实际值与预测值。在时域中(图14(b)),SOC实际值(即整车能耗)呈非线性,且波动较大,导致预测困难。而在空间域中(图14(a)),SOC实际值相对更为线性,故预测更为容易且准确。这说明本文选择在空间域进行预测,即1.4节将行驶数据按空间域划分为16段,是合理的,且可以简化预测的难度。
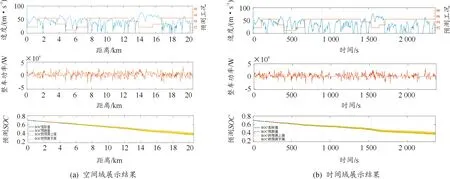
图14 实车上路结果
图14(a)的第1类型包含多种拥堵与通畅工况,说明本文的实验设置能够满足数据多样性的要求。图14(a)的第2行子图为实时的整车功率。
图14(a)的第3行子图是对车辆SOC的估计值,其SOC预测值、SOC的预测上限和下限由3σ准则所确定。具体而言,图15表示某一预测工况下的平均能耗概率分布直方图,近似符合正态分布,图中间的红线为平均能耗期望μ。根据平均能耗μ可计算出的SOC的变化趋势对应于图14(a)、(b)第3行中的橙色实线。图15左右的2条红色虚线则为期望减或者加一个单位的标准差,即(μ-σ)或者(μ+σ),对应图14(a)中的绿色虚线和紫色虚线,表示预估能耗的上/下限,即预测SOC的下/上限。根据3σ准则,2条虚线之间的直方柱面积占总体直方图面积的68.27%,即实验中的平均能耗分布在此区间(μ-σ,μ+σ)的概率为0.682 7,当实验偏差超过此区间时,认为数据预测不合格。在图14中,代表实际SOC的蓝色实线始终位于代表预测值上/下限的紫色虚线与绿色虚线所形成的黄带中,并且与橙色实线(预测SOC的数学期望)非常接近,这说明此预测结果较为准确。
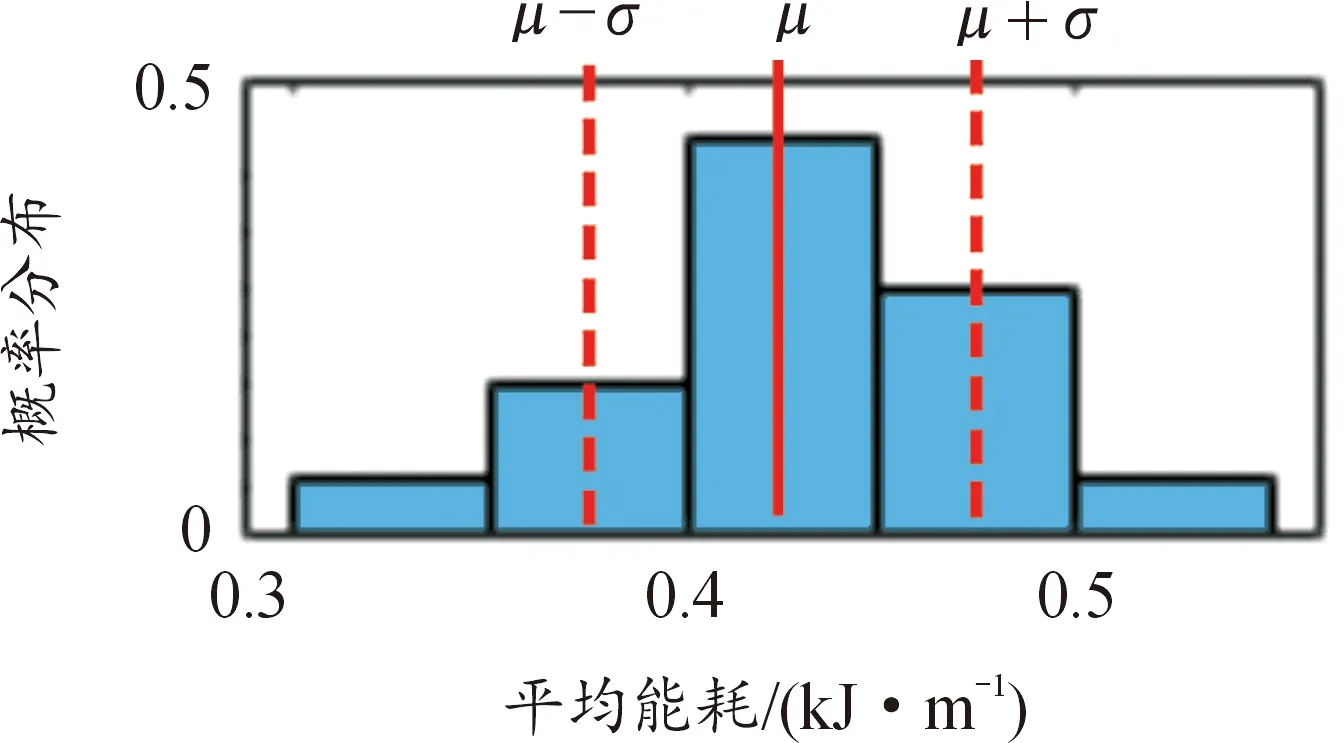
图15 平均能耗概率分布直方图示例
表6列出了SOC预测值(数学期望)与SOC实际值的平均误差,其中误差最大值仅为0.63%,这说明预测具有较高的准确率。
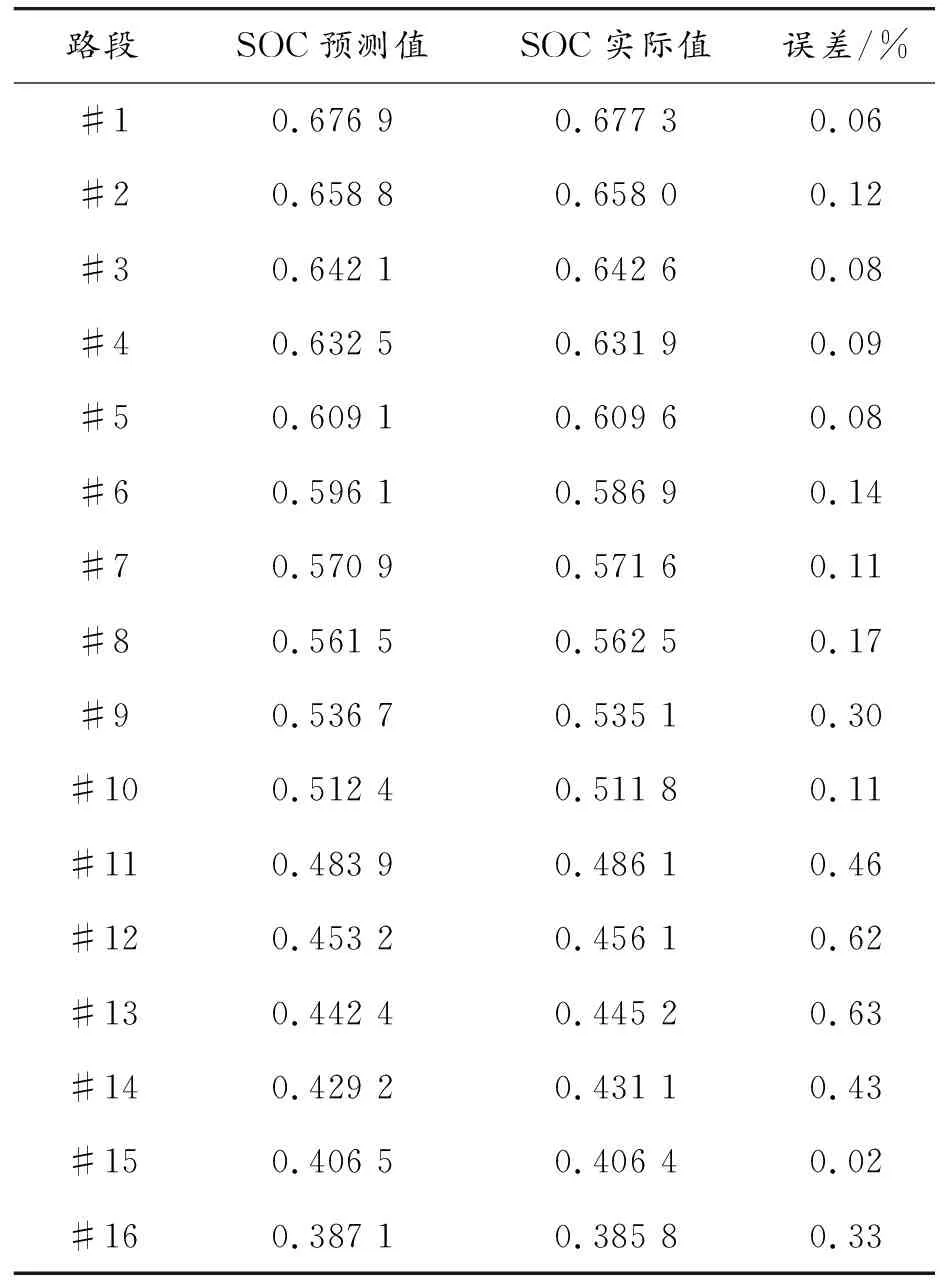
表6 预测值与实际值的误差百分比
4 结论
为更准确地预测电动汽车的未来行驶工况,搭建了实车在环实验平台并利用百度地图API智能交通系统以获取实时车流信息。将所采集的历史行车数据OBD与API实时车流信息相结合,并使用EM聚类分析的结果来训练RBF神经网络分类器。而完成训练的RBF神经网络可以利用百度API获取的实时车流信息对车辆进行平均能耗及行驶工况的预测。实车在环实验证明了预测算法的准确性较高,可满足预测需求。
