压铸机锁模力测量新技术及其验证
2023-12-09蔡加军蔡恒志徐文静张建军
蔡加军,蔡恒志,徐文静,卢 军,张建军,4,张 阳
(1.深圳中研塑力科技有限公司,广东 深圳 518000;2.深圳领威科技有限公司,广东 深圳 518000;3.济南铸锻所检验检测科技有限公司,山东 济南 250399;4.国家铸造锻压机械质量检验检测中心,山东 济南 250399;5.合肥工业大学仪器科学与光电工程学院,安徽 合肥 230000)
近期新能源汽车市场的发展导致了超大一体零件设计技术的普及应用。与常规使用的小型零件相比,超大型结构零件功能和设计更复杂,产生了厚度相差太大和流动融液走动不对称的问题,这些对于锁模力提出了更高的要求。
锁模力是否达到预定值以及四根哥林柱是否受力均匀是评价压铸机的重要指标之一,哥林柱的结构如图1 所示,其中图1a 表示的是未受力时的哥林柱,图1b 表示的是哥林柱受力后的位移云图。如果锁模力设置过小,那么制品就会产生飞边的问题,反之如果锁模力设置过大,会影响模具排气,增加能耗,缩短模具和设备的使用寿命,不符合经济性的要求[1]。而只有受力均匀分布的压铸机才能确保制品品质并能对模具和压铸机本身起到保护作用,延长模具和压铸机的寿命。此外,四根哥林柱是否平行也影响着机器本身的寿命和压铸件的质量。如果模板或者模具不平行,那么会导致每根哥林柱受力相差较大,进而发生断裂,导致生产无法继续进行下去。因此生产中需要时刻控制四根哥林柱的受力大小在可接受范围内。通常的做法是在压铸机上安装测量装置,传统的测量方式是用粘贴式应变片[2]来测量哥林柱的应变,然后计算每根的受力大小,最后将它们加起来得到锁模力大小。但是粘贴工作很麻烦,比较耗时[3],胶水对于哥林柱来说本身就是一种破坏,会影响测量的精确度,此外应变片只能使用一次,并且在机器快速运动时容易脱落,因此该方法在精度和成本上都存在很大问题,不适合长期使用。现在一种新的锁模力测量技术的出现解决了这些问题。
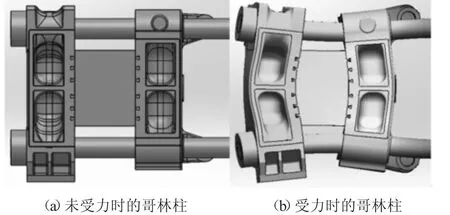
图1 哥林柱结构
1 新型锁模力测量装置
深圳中研塑力科技有限公司(以下简称中研塑力)研发了一款新的应变传感器,不但可以用于注塑机上,也可以用于压铸机上。这款传感器适用于测量固定或移动机器部件上的动态和准静态力,和传统应变片测量原理一样,也是先测出机器或结构表面的力比例应变,从而间接得到锁模力。高灵敏度和加速度补偿设计使得它可以对快速运行的机械(例如压力机、自动装配机)进行过程监控,并且安装十分方便,仅用一颗M6 螺钉固定,不会产生脱落的风险,其结构如图2 所示。
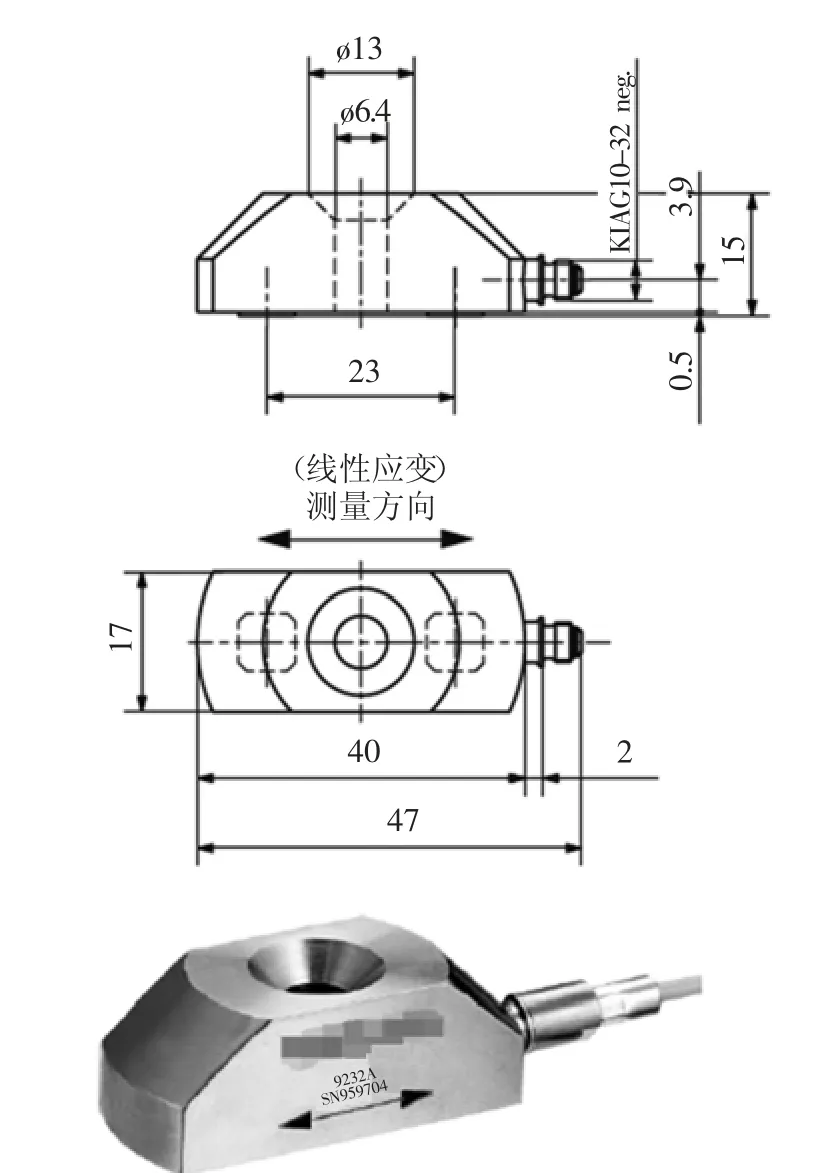
图2 应变传感器结构
安装时,需要先将传感器与机器结构对齐,然后在测量点加工M6 螺纹,如图3 所示。靠近传感器的电缆应尽可能不受推力或拉力的影响。 电缆应夹紧到位,以避免应变或振动传输。在安装好以后,需要根据实际情况进行校准。与其他的线应变计技术相比,其特殊优势在于灵敏度高、抗过载能力强以及即使在负载波动的情况下也几乎可以无限使用。另外,由于依靠螺钉进行固定,即使在有连续冲击载荷的在线生产监测环境下,该传感器也能够很好地进行工作。
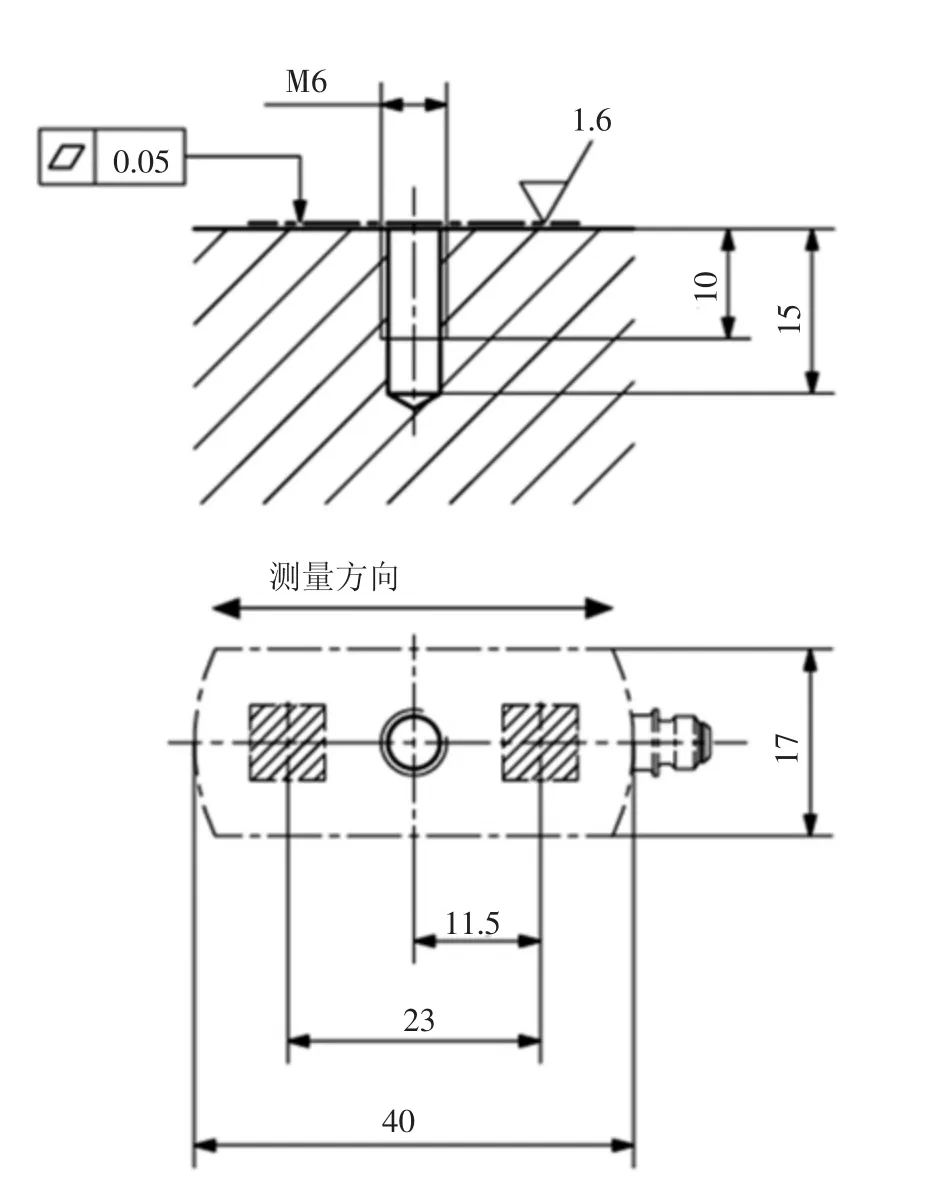
图3 传感器的安装
2 哥林柱及锁模力的测量原理
测量应变的方法很多,但原理基本都是通过锁模时哥林柱所受到的载荷发生形变量来进行间接测量的[4]。锁模力的计算公式如式1 所示。
式中:F锁为锁模力, 单位kN;Fi为第i 根拉杆上的轴向力, 单位kN;A 为拉杆测试处截面积, 单位cm2;E 为拉杆材料的弹性模量, 单位kN/cm2;μ为拉杆材料的泊松比,一般取值为0.28;εi为第i根拉杆的应变仪读数的应变量;n 为拉杆的数量。
3 实验验证有效性
选择9232A 型应变传感器进行实验,来验证传感器的准确性。深圳力劲公司提供了实验环境和实际生产所用的标准锁模力传感器,目的是为了将中研塑力研发的传感器与其进行对比,看其测量的锁模力值是否满足线性关系。
在实验中,以2800 t 压铸机作为实验对象,并分别在它的动模板和曲柄位置安装了应变传感器,在它的四根哥林柱上安装了标准锁模力传感器,如图4 所示。
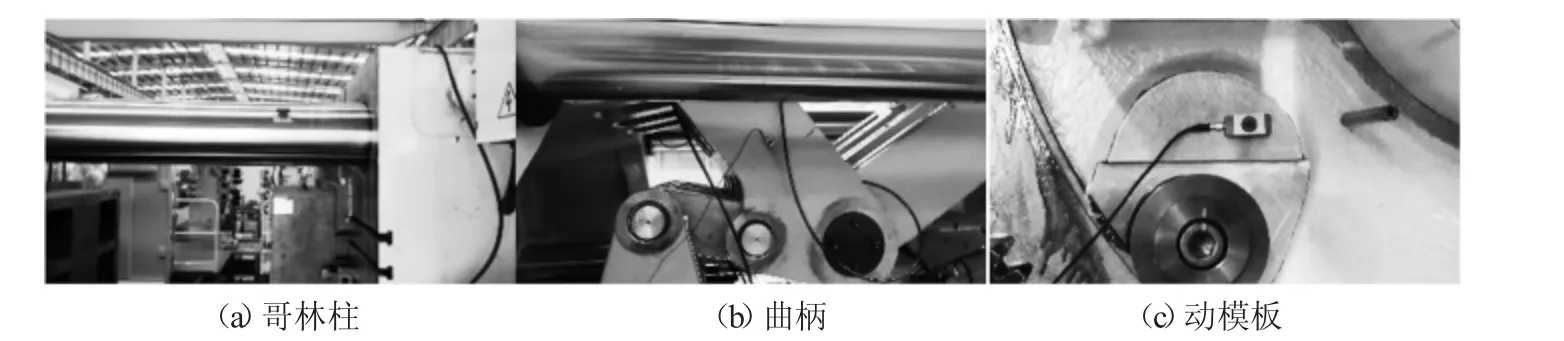
图4 传感器的安装
实验开始时,先对中研塑力的应变传感器进行校零处理,然后分别在两种安装位置下各做了十一组实验,并记录每一次用标准锁模力传感器得到的总锁模力大小和用中研塑力传感器检测到的第一根哥林柱的锁模力,结果如表1 和表2 所示。
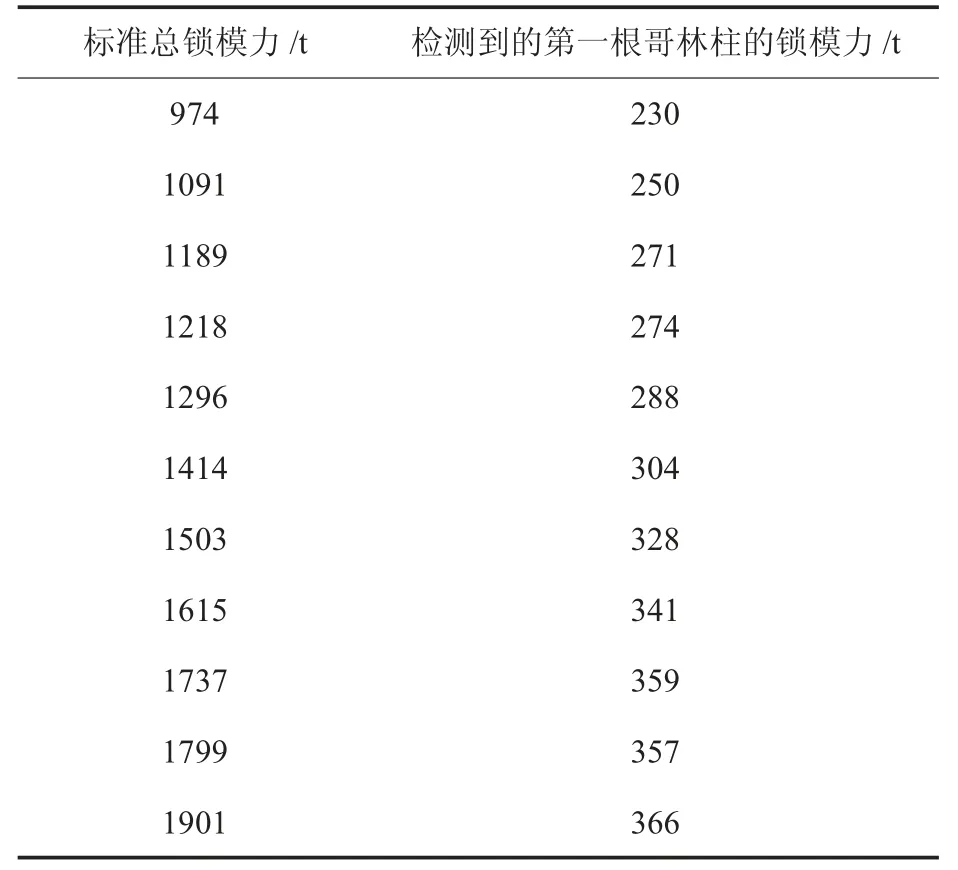
表1 安装在曲柄上的实验
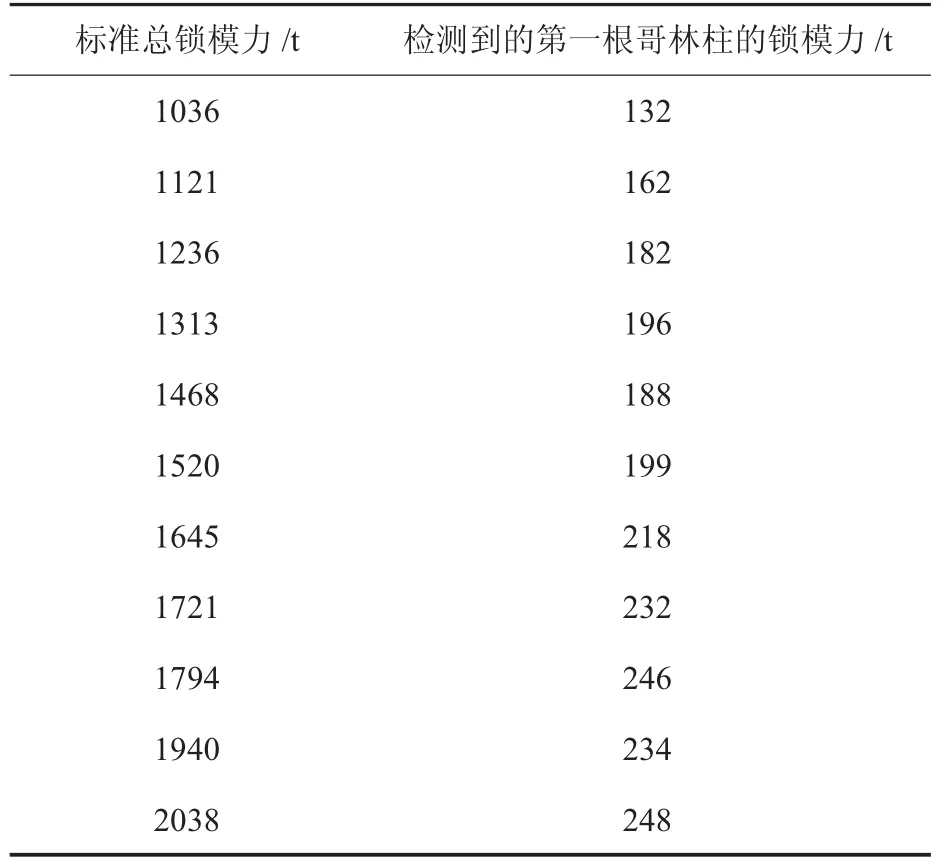
表2 安装在动模板上的实验
理想情况下,每根哥林柱的受力大小应该一样,而且和总的锁模力大小呈线性关系。实际应用中,由于可以调节应变力和电压之间的比例,所以不能将哥林柱受力大小应该是总锁模力的四分之一这个约束作为传感器检测是否准确的衡量标准,而应该观察它们之间是否呈现线性关系。因此采用最小二乘回归来对数据进行拟合,以此判断中研塑力传感器的准确性。
在python 里面对数据进行处理并绘制图像,得到的结果如图5 和图6 所示。
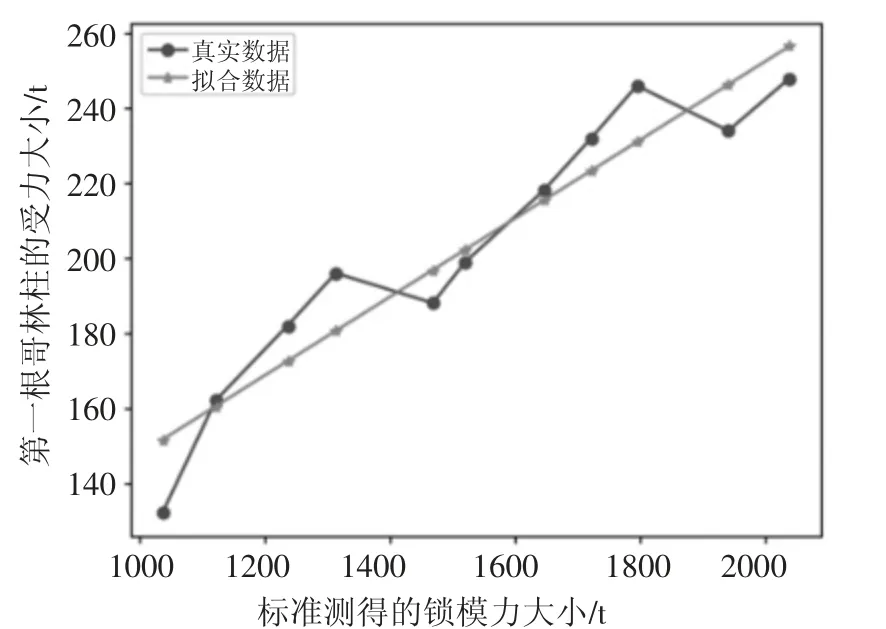
图6 安装在动模板上
从图中不难看出,安装在曲柄上的传感器得到的第一根哥林柱的锁模力与标准总锁模力明显存在很强的线性关系,而安装在动模板上的传感器得到的第一根哥林柱的锁模力与标准总锁模力也具有一定的线性相关性。为了更有利说明这一点,我们计算了最小二乘回归方法的均方差MSE和相关性系数R,所得结果如表3 所示。
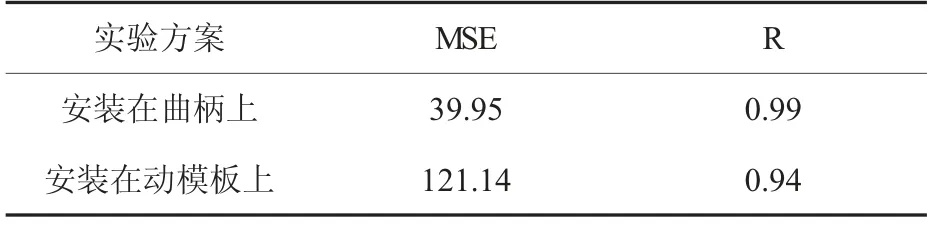
表3 均方差和相关性系数
从表中可以看出,安装在曲柄上的实验方案所得到的均方差远小于安装在动模板上的试验方案所得到的均方差,而且前者的相关性系数更大,说明安装在曲柄上的方案更为可取,可能的原因是由于动模板距离哥林柱太远,容易受到其他力的干扰,所以会造成测量上的更大误差,在实际生产中应首先考虑安装在曲柄上的方案。
此外,不难发现,两种方案中拟合的直线都没有经过原点,可能是测量的组数太少以及在加工过程中机器的冲击对于传感器的测量有一定影响。
4 结论
中研塑力研发的新锁模力测量应变传感器有如下优点:
(1)相比于传统粘贴式应变片,安装更加稳固,而且可以重复使用。
(2)有方便的接口,可以直接从操作面板中读取锁模力值,操作性更强。
另外,需要注意安装位置,应该考虑装在离哥林柱较近的位置,如曲柄上。
