偏载下大长径比水润滑轴承分布式动特性参数识别方法∗
2023-12-06程奇志欧阳武黄志伟彭伟才
程奇志 欧阳武 黄志伟 彭伟才
(1.武汉理工大学船海和能源动力工程学院 湖北武汉 430063;2.武汉理工大学交通与物流工程学院 湖北武汉 430063;3.国家水运安全工程技术研究中心,可靠性工程研究所 湖北武汉 430063;4.中国舰船研究设计中心船舶振动噪声重点实验室 湖北武汉 430064)
船舶动力系统中,推进轴系主要用于传递主机动力和螺旋桨推力,是保障船舶正常运行的关键部件。其中水润滑艉轴承作为螺旋桨轴的重要支撑部件,具有优良的减振性能、较小的摩擦因数和无污染等优点[1-2]。作为螺旋桨-轴系-主机-船体之间传递振动能量的关键元件,艉轴承的动力学特性影响着推进轴系的动力学行为,直接关系到推进系统运转质量的优劣[3-5]。准确识别艉轴承动特性参数有利于提高推进轴系动特性预测和提出减振降噪方法的置信度,对实现船舶机舱振动故障诊断有重要意义。
在过去的几十年里,国内外对滑动轴承的动态系数识别方法已经做过大量的工作,根据是否人为施加激励,滑动轴承动特性参数的识别方法可分为外部激振法和不平衡质量法。不平衡质量法不需要外部激振,系统的激振来源于轴承-转子系统自身的不平衡力;而外部激振法包括稳态激振法和瞬态激振法,其中稳态激振法包括单频两次激励法、复合激励法、多频激励法,瞬态激振法则包括脉冲激振法和宽带激振法[6]。马石磊等[7]利用不平衡质量法研究了转速、供水压力等因素对轴承动特性参数的影响。KUMAR REDDY 等[8]采用单频两次激振法识别了可倾瓦轴承动特性参数,测量值与基于TEHD 模型计算得到的仿真值相差约10%。杨利花等[9]建立了新型弹性箔片动压气体轴承性能测试实验台,采用复合激振法研究了不同激振频率对轴承动特性参数的影响。CHATTERTON等[10]采用多频激振法研究了激振频率与可倾瓦轴承动特性参数的关系。CHILDS 和HALE[11]分析了能量集中的频带信息,利用最小二乘法解出动特性参数。MATTA 和ARGHIR[12]利用冲击锤产生的脉冲激励和测量得到的位移响应之间的联系,识别了径向轴承的动特性参数。
综上所述,目前轴承集中动特性识别方法的研究较多。普通径向轴承长径比(轴承长度与内径的比值)为0.8~1.2,而艉轴承长径比达到了2~4[13]。另外,在螺旋桨的悬臂作用下,转轴会发生倾斜。轴倾斜和大长径比这2 个因素将导致轴承沿轴向出现润滑分区的现象,轴承动特性呈现分布特征,目前将轴承假设为单支点的集中动特性识别方法难以满足艉轴承动特性识别需求。为此,文献[14]提出了识别轴承两端动特性参数的方法,但对轴承模型简化较多,仅识别了轴承垂直方向的主刚度和主阻尼系数。在此基础上,文献[15]建立了可以模拟轴弯曲的轴承动特性试验台,以转子-轴承系统力平衡方程为基础提出轴承动特性参数的识别方法,为轴承分布式动特性识别提供了新思路,但将假设的两段轴承之间的相互作用被忽略了。
为此,本文作者以偏载下大长径比水润滑轴承为研究对象,建立了两支点分布式动力学模型,综合考虑力平衡和力矩平衡方程,提出了一种基于正反动力学问题水润滑轴承动特性识别方法,利用仿真试验分析了加载信号和位移信号扰动对识别误差的影响。
1 水润滑轴承分布式动特性参数识别模型
1.1 动力学模型
将轴承沿轴承垂直中心线划分为2 个单元,假设轴承有2 个等效支点支撑着转轴,形成两支点分布式动特性模型。大长径比水润滑轴系系统动力学模型如图1 所示,水润滑轴承左侧由激振装置提供动态激振力fy,右侧由配重盘模拟螺旋桨自重f0,l1、l2分别为左右两端水润滑轴承到转子质心的距离,l3、l4分别为动态激振力和静载力施加位置到转子质心的距离。

图1 大长径比水润滑轴承系统的动力学模型Fig.1 Dynamic model of water lubricated bearing system
当转子转速为Ω时,对轴施加垂直激振力fy后,可获得左右两端水润滑轴承中心测量的转子运动x1、x2、y1和y2。基于上述简化后的模型,通过力和力矩平衡可得:
式中:xc和yc分别为转子质心在水平和竖直方向上的运动;m为转子和轴承的总质量;kx1、ky1,cx1、cy1分别为左侧(电机端)水润滑轴承的刚度和阻尼参数;kx2、ky2、cx2、cy2分别为右侧(悬臂端)水润滑轴承的刚度和阻尼参数;θx和θy为转子倾斜角;It和Ip分别为转子径向惯性力矩和转子极惯性力矩。
转子质心的运动:
转子在x轴和y轴上的倾斜角:
式中:L为左右两端水润滑轴承的中心距离,L=l1+l2。
联立公式(1)—(8)并进行FFT 变换,可得:
1.2 反问题和仿真验证
在轴上施加激励力fy,一次激振可以建立4 个方程,对4 个方程进行FFT 变换,求解可得到8 个刚度和阻尼系数。将通过负载和位移响应得到刚度阻尼系数的计算过程称为反问题。等式(9)进行线性化处理可得到。
方程式中:
方程式(10)中,Qi和Pi已知,i=x或y。求解矩阵方程Pi=Qi-1Ni来获得轴承动特性参数。
为验证文中识别方法的可信度,参照文献[16]中的参数进行仿真。将文献[16]中的标准值与不添加干扰下的反问题识别结果进行对比,结果如表1 所示。可知,刚度和阻尼系数识别最大误差绝对值小于0.3%,表明动特性识别方法是可信的。
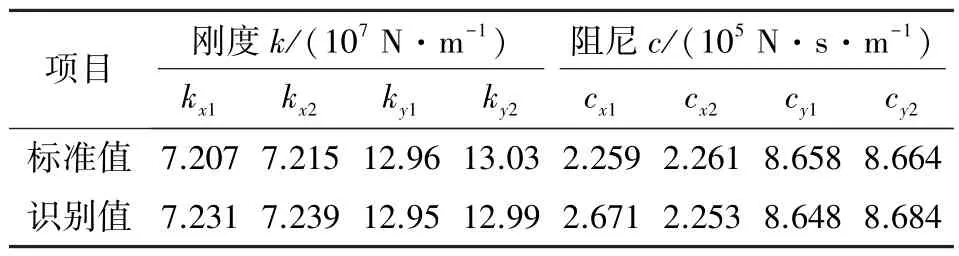
表1 刚度和阻尼系数标准值和识别值比较Table 1 Comparison of standard and identification values for stiffness and damping coefficient
2 试验对象和试验台
试验轴承结构如图2 所示,以长度200 mm、直径50 mm 的水润滑轴承为研究对象,建立水润滑轴承动特性识别试验台,如图3 所示。该试验台包括驱动电机、扭矩仪、支撑轴承、加载系统、试验轴承、配重盘和限位装置组成。其中试验轴承为水润滑轴承,支撑轴承为滚动轴承。试验转速范围0~250 r/min,配重盘质量25 kg,试验台基本参数如表2 所示。

图2 试验轴承实物图Fig.2 Physical picture of test bearing
3 水润滑轴承分布式动特性识别方法仿真试验
3.1 仿真试验方法
为检验轴承动特性参数识别方法的可行性和了解外部干扰对动特性参数的影响,开展了仿真试验研究。仿真试验流程如图4 所示。首先,给定激振力F、轴承刚度k和阻尼c,对动力学模型进行正问题求解,获得位移响应Q;然后,对F和Q添加幅值误差或者相位误差,在动力学模型进行反问题求解,得到轴承刚度和阻尼的识别值k和c。通过对比给定值和识别值,分析识别精度影响情况。

图4 轴承动特性识别方法仿真试验流程Fig.4 Dynamic characteristic parameter identification process
轴承动特性试验时,采集信号的误差包含系统误差和偶然误差。在仿真试验中,通过给力和位移值主动添加干扰,来模拟测试误差。具体是在频域中给幅值和相位添加偏差:
式中:A0和∂0为采集信号干扰前的幅值和相位;ΔA和Δ∂分别为采集信号受干扰造成的幅值偏差和相位偏差;A1和∂1为采集信号干扰后的幅值和相位。
3.2 仿真试验结果
仿真试验中F为171exp(-j0.886π),轴承的刚度和阻尼值如表3 所示。
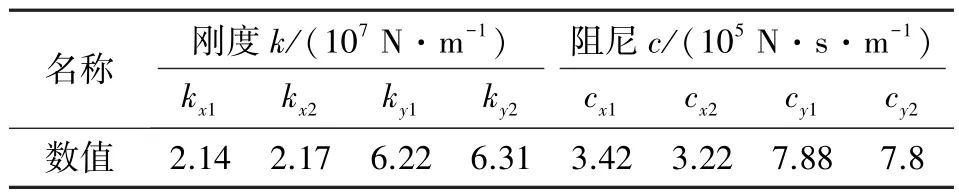
表3 刚度和阻尼系数输入值Table 3 Input values of stiffness and damping coefficient
3.2.1 激振力扰动对识别精度的影响
激振力幅值扰动对刚度阻尼识别值相对误差影响如图5(a)所示,随着激振力振幅扰动的增加,刚度和阻尼系数的识别误差线性增加。相同扰动下,阻尼系数误差的变化值大于刚度系数误差的变化值。如果刚度和阻尼系数的识别误差小于10%,则激振力的幅值扰动应小于16%。

图5 Fy幅值扰动和相位扰动对刚度阻尼识别值相对误差影响Fig.5 Influence of Fy amplitude disturbance(a)and phase disturbance(b)on relative error of stiffness and damping identification value
激振力相位扰动对刚度阻尼识别值相对误差影响如图5(b)所示,激振力相位扰动对刚度系数的影响较小,对阻尼系数的影响较大。随着激振力相位扰动的增加,刚度和阻尼系数的识别误差逐渐增加,刚度系数误差的增长速率也随相位的增大而增大。对于水润滑轴承,如果主阻尼的识别误差小于20%,则激振力的相位干扰应小于3°。
3.2.2 位移信号扰动对识别精度的影响
位移幅值扰动对刚度阻尼识别值相对误差影响如图6(a)所示,随着位移幅值扰动的增加,刚度和阻尼系数的识别误差增加。同一幅值干扰下,阻尼系数和刚度系数的识别误差基本相同。如果刚度和阻尼系数的识别误差小于10%,则位移幅值扰动应小于10%。
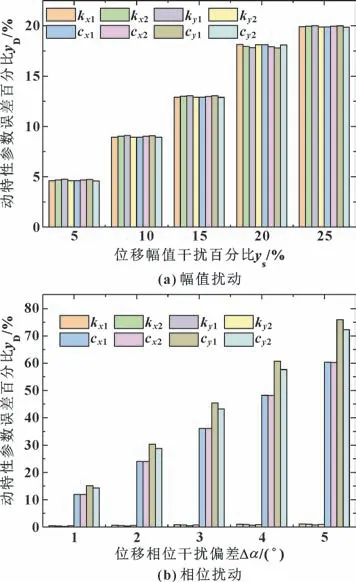
图6 位移扰动对刚度阻尼识别值相对误差影响Fig.6 Influence of displacement amplitude disturbance(a)and phase disturbance(b)on relative error of stiffness and damping identification value
位移相位扰动对刚度阻尼识别值相对误差影响如图6(b)所示,位移信号的相位扰动对刚度系数的影响较小,对阻尼系数的影响较大,刚度和阻尼系数都会随着位移信号的相位扰动的增大而增大。对于水润滑轴承,如果阻尼的识别误差小于20%,则位移幅值的相位干扰应小于1°。
4 水润滑轴承分布式动特性识别试验
图7 展示了轴承刚度和阻尼随转速的变化。可知,垂直方向刚度大于水平方向刚度,垂直方向阻尼大于水平方向阻尼,这与水膜承受垂向载荷有关。另外悬臂端的刚度和阻尼大于对应电机端的刚度和阻尼。当转速增加时轴承两端阻尼呈下降趋势,刚度略微减小,这是因为当转速增加时,轴承由混合润滑状态过渡到动压润滑状态,水膜厚度增大使刚度减小,润滑区域增大使阻尼减小。
5 结论
为解决偏载下大长径比水润滑轴承分布式动特性参数识别问题,建立了水润滑轴承的两支点分布式动力学模型,基于动力学的正、反问题的计算方法,提出了一种识别水润滑轴承动态系数的方法,分析了加载信号扰动和位移信号扰动对辨识精度的影响,并进行仿真验证了该动特性参数识别方法的准确性。结论如下:
(1)随着激振力振幅扰动的增加,刚度和阻尼系数的识别误差线性增加。激振力相位扰动对刚度系数的影响较小,对阻尼系数的影响较大。
(2)随着位移幅值扰动的增加,刚度和阻尼系数的识别误差增加。位移信号的相位扰动对刚度系数的影响较小,对阻尼系数的影响较大。
(3)仿真计算结果表明,若要求刚度和阻尼的识别误差小于10%,则激振力和位移信号的扰动幅值应小于10%;若要求刚度和阻尼的识别误差小于20%,则这2 个信号的扰动相位扰动偏差应小于1°。
