基于对象时空Petri网的CPS建模与仿真
2023-11-29邓亮亮张立臣姜文超
邓亮亮,张立臣,姜文超
基于对象时空Petri网的CPS建模与仿真
邓亮亮,张立臣,姜文超*
(广东工业大学 计算机学院,广州 510006)( ∗ 通信作者电子邮箱jiangwenchao@gdut.edu.cn)
信息物理融合系统(CPS)是一个融合了计算、控制、通信和物理元素的分布式实时反馈系统,但传统的建模方法无法满足CPS对时空性能要求较高的情况。为此,提出结合对象特征的对象时空Petri网(DS-OPN)建模方法。首先,将面向对象封装技术、时空元素融入Petri网中,设计空间和时间描述规则,将相同对象下的场景元素封装到同一对象子网系统模型中。其次,定义聚合规则,聚合各个子网模型,使这些模型能够描述CPS物理拓扑环境中的对象变化过程。最后,以交通CPS为例,建模和仿真分析自主控制超车系统的动态行为;同时,建立模型的可覆盖性树和关联矩阵分析验证模型的可达性、安全性等性质。实验结果显示,DS-OPN建模方法建立的模型对系统流程的逻辑结构表现清晰,对时空因素的计算准确,在实时性和安全性上能满足CPS的要求,验证了该建模方法的有效性和安全性。
信息物理融合系统;建模与仿真;时空特性;面向对象;Petri网
0 引言
随着信息化和工业化的深度融合与发展,传统的单点技术已经很难适应新一代的生产装备信息化和网络化需求[1-2]。信息物理融合系统(Cyber-Physical System, CPS)实现了连续系统和离散系统的融合,是未来嵌入式系统的发展方向[3]。在众多的CPS软件安全领域中,软件故障的出现促使人们在软件开发的初期就需要验证软件功能的正确性,并验证它是否满足CPS的非功能属性[4]。这就需要进行建模与仿真,早期的测试和修复漏洞可以在系统开发的过程中节省大量的金钱。传统的CPS建模方法大都采用面向过程或将数据与操作分开处理的开发模式,模块之间不能自然地衔接,利用率低,建模开发难度大。而现有的分析和建模方法无法有效地分析网络系统和物理对象在时间和空间上的变化[5]。Petri网作为图形化建模工具,具有并行、分步、实时等描述和分析能力,用Petri网来建模CPS系统优势明显[6];但是经典Petri网只能描述离散系统,这使它在描述时间方面的内容时具有局限性。
目前,国内外已经有许多使用Petri网来对CPS进行建模的研究。宋相君等[7]给出了一种扩展混成Petri网的模型,并通过无人车仿真实验验证所提模型的有效性;Hu等[8]研究了Petri网在CPS当中的应用;Chen等[9]研究了事件的空间和时间属性,定义了新的CPS架构,并为CPS开发了基于分层的空间-时间模型;陈小颖等[10]针对CPS时空不一致的安全性问题,提出了一种面向CPS时空安全性质验证的混成AADL建模与模型转换方法;王婷等[11]通过改进已有的时间自动机包含算法,只考虑关注事件,总结了时间自动机描述的常用属性模式;Huang等[12]利用对象Petri网建立了一种防空反导系统并进行了仿真,但描述不够全面,仿真和数据分析也不太完善。上述研究为CPS系统建模提供了一些基础建模方法,但往往都是从单一方面入手进行建模,所建模型较难适用于对时空性要求较高的CPS物理实体对象[13]。
本文针对CPS物理对象的时空特性提出一种结合对象特征的对象时空Petri网(Duration-Space Object Petri Net, DS-OPN)建模方法,通过一系列的定义规则,将对象子系统集成到模型中,实现面向对象技术、时空特性以及Petri网的融合;并首次将对象时空Petri网建模方法应用到自主控制超车系统建模中。以面向对象的封装技术,结合了对象、时间和空间因素,在普通Petri网的基础上添加时间和空间以及物理对象的因素,对物理实体对象进行建模;然后,通过构造模型的可覆盖性树和关联矩阵,对所建立的Petri网模型进行可达性、安全性等相关性质的分析验证;最后,将建立的模型进行Simulink仿真,验证方法的有效性。
1 面向对象时空Petri网
1.1 Petri网
Petri网是研究信息系统及其相互关系的图形和数学工具,是一种用令牌流动的方式描述和分析并发、异步系统动态变化的网络,被称为流程定义语言之母。高级Petri网可以方便地进行层次化建模,适合于自顶向下的建模及各个阶段的独立验证和确认[14]。





1.2 时间Petri网
时间Petri网(Time Petri Net, TPN)是在传统Petri网的基础上对每一个变迁都关联一个时间区间,用来表示该变迁持续的时间范围。由此TPN也可以对系统的时间层次性能进行研究分析,扩大了Petri网的应用范围。
1.3 面向对象的时空Petri网


定义3 一个物理对象类表示为一个五元组=(,,,,),其中:为物理对象类的;为该对象类的属性集合;为物理对象类的行为集合;则是属性集合到数据类型映射;为对象预留的接口。→DataTypes数据类型除了基本数据类型,也包含形如(,)的坐标类数据类型。
2 超车CPS的DS‑OPN建模
近些年来,CPS在很多的领域已经有了应用,从细小的纳米机器人到庞大的基建设备,从城市智能交通信息提供到远程手术医疗系统,智能交通、智慧农业、能源电网、国防科技、建筑业、制造业流水线等都是它涉足的领域。在汽车领域中,国内外车企对无人驾驶技术投入了极大的研发力度,自主控制技术一旦成熟,将会极大地解放人力,带来巨大的社会效益和汽车安全性的提升。
汽车由大量的传感器、控制器和执行器组成。通过传感器实时获取当前的道路信息,由控制器输出决策指令,再用执行器来更新汽车的驾驶状态。汽车的自主控制系统是一个典型的CPS系统。本章基于自动驾驶汽车系统,通过对自动驾驶汽车超车系统行为建模,具体地描述通过面向对象的时空Petri网建立相应系统模型的方法。
DS-OPN建模流程主要包括以下几个步骤:
1)分析遍历建模业务行为场景,构造CPS场景的体系结构,建立逻辑关系图;
2)抽离出场景中的物理对象,根据定义3中的对象属性和行为特性将对象形式化表示出来;
3)根据DS-OPN建模理论建立各个对象子网模型,并构建它们的对象子网模型图;
4)封装对象子网模型,根据各个对象子网模型的连接关系预留连接接口;
5)结合物理实际场景逻辑关系图和体系结构图,给各个对象子网模型赋予时空属性;
6)将各个子网模型接口根据具体含义连接起来,建立整体链接通路;
7)根据定义2构造业务场景的整体DS-OPN模型;
8)根据Petri网理论进行模型检验分析,然后进行仿真实验分析。
2.1 建模实例

自动驾驶汽车超车系统中的汽车作为物理对象,属于Car类,它的建模方式形式化定义如下:(_,{,,,},{,,,},{,,,})。
道路场景协调对象属于环境类,它的形式化表示为:(_,{,},,{,,})。其中:表示道路区域信息,表示坐标信息。为了方便讨论,以初始位置的车道为第一车道,剩下的车道为第二车道。
2.1.1超车系统的Car_A对象子网模型
超车CPS的Car_A对象子网模型1如图1所示。在图1中,11表示传递Car_A初始行驶指令信息,12表示Car_A以=20 m/s的初速度在右侧车道2行驶,13表示向道路协调中心发送行驶状态信息,14表示雷达刷新频率为0.01 ms,15表示向控制中心发送雷达捕获的信息,16表示控制中心发送紧急制动指令;11表示Car_A的控制中心,控制车辆行驶状态,12表示Car_A在2上的行驶距离,13表示雷达捕获的周围环境信息,14表示紧急制动结果;11表示初始化行驶信息,11表示向道路协调处理对象发送信息的接口。
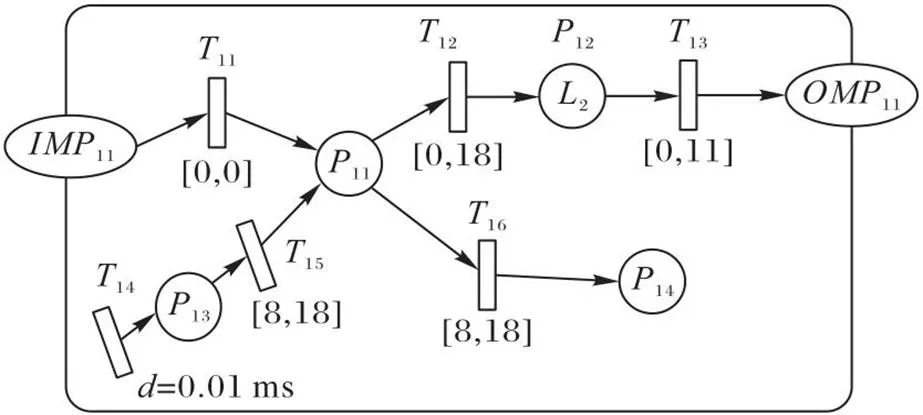
图1 超车CPS的Car_A对象子网模型
2.1.2超车CPS的Car_B对象子网模型
Car_B对象子网模型中既要根据雷达测距系统调节自身车速,又要根据道路协调对象子系统的反馈进行变道超车。具体的Car_B对象子网模型2模型如图2所示,其中主要节点的设计含义如表1所示。
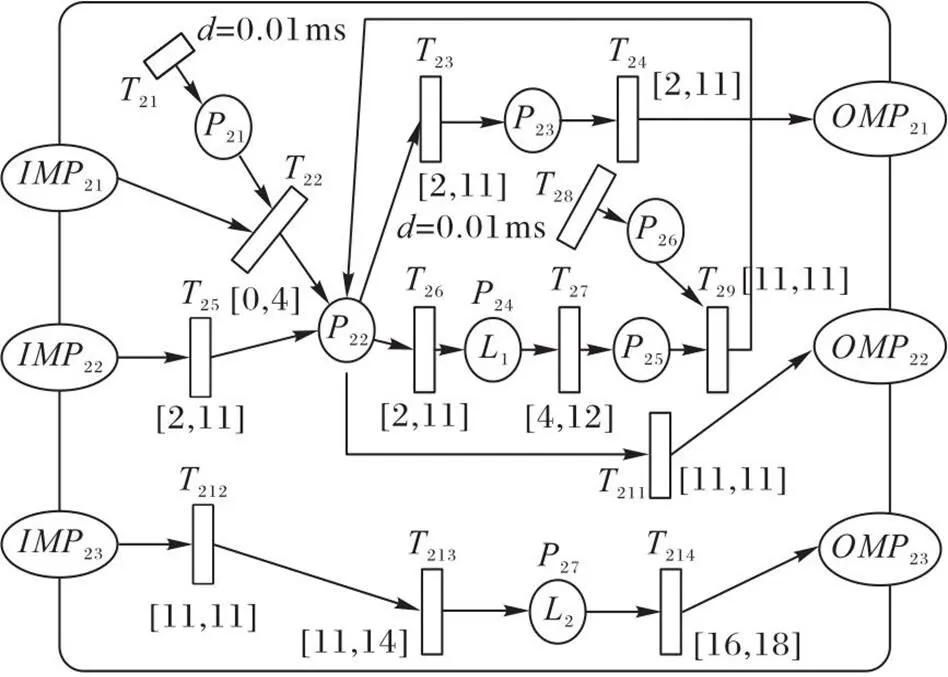
图2 超车CPS的Car_B对象子网模型

表1 图2中部分节点的含义
2.1.3超车CPS的道路协调对象子网模型
道路对象子系统一方面接收1的行驶信息,另一方面接收超车系统的Car_B对象子网模型2的行驶请求信息,通过信息分析给出是否同意超车的指令信息,它起到了协调管理路上车辆的作用。道路协调对象子系统模型如图3所示。
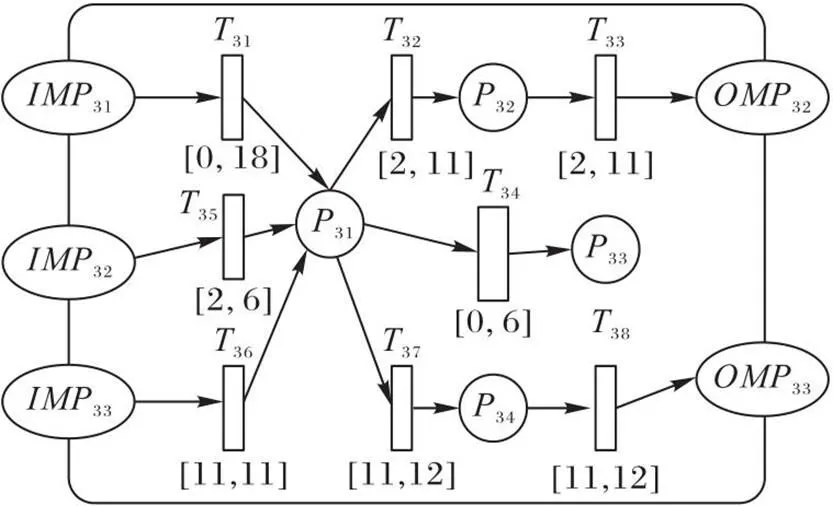
图3 道路协调对象子网模型
图3表示的是道路协调管理对象子网模型3,在图3中:31表示向控制中心31传递Car_A行驶信息;32表示条件达到,同意超车;33表示向Car_B发送同意超车指令;34表示条件不允许,拒绝超车,进入等待序列;35表示向控制中心传递超车转向申请;36表示向控制中心传递向右转回申请;37表示生成同意转回指令;38表示向Car_B对象发送同意右转指令。31表示道路协调对象子网的控制中心;32表示同意超车的指令信息;33表示拒绝超车信息,等待序列;34表示同意向右变道的指令信息。31表示Car_A传递的行驶信息接收接口;32表示Car_B申请超车信息的接收接口;33表示Car_B请求向右变道的信息接收接口;31表示向Car_B发送同意超车指令的接口;32表示向Car_B发送同意向右变道指令的接口。
2.1.4超车CPS的整体DS-OPN模型
建立好自动驾驶汽车的超车系统各个子网之后,依据各个对象之间的消息传递关系,以门变迁为桥梁将各个对象子网的接口连接起来,构建自动驾驶汽车超车系统的整体DS-OPN模型,如图4所示。
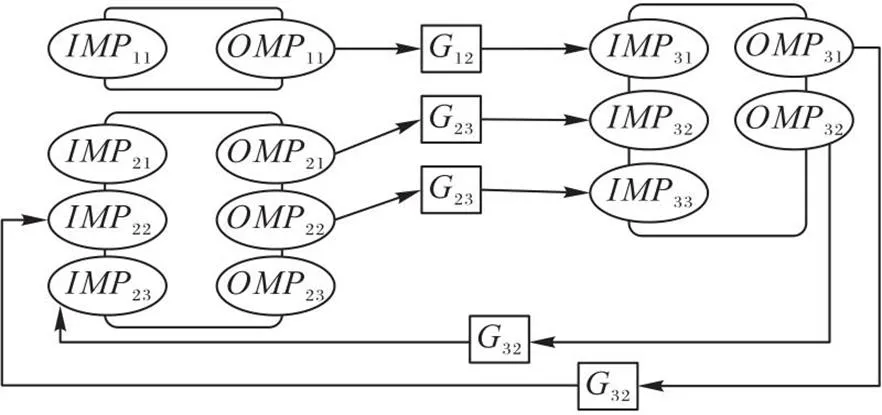
图4 超车CPS的整体DS-OPN模型
在图4中,首先1对象子网通过12门变迁向3道路协调对象子网发送Car_A行驶信息,接着2通过门变迁23发送Car_B超车请求,3综合分析对象子网1和2信息做出指令反馈,直至超车完成。通过各个对象子网模型的逻辑信息和时间与空间车道的标注信息,可以直观地看出整个超车系统的逻辑关系和核心对象的动态活动情况。模型采用面向对象技术,封装的对象具有模块化特性。结合Petri网的图形化和结构化特点,DS-OPN模型对于自动驾驶汽车超车系统的描述能力较好。
2.2 DS-OPN模型性质验证分析
为了验证本文模型的安全性等性质,对它进行一些Petri网相关性质的验证分析。Petri网模型的性质主要有安全性、可达性、有界性等,其中验证方法主要有可达图、可覆盖性树、关联矩阵[16]。
可达标识图、关联矩阵和状态方程等均是很好的Petri网分析工具,通过它们可以判定Petri网的各种动态性质。下面围绕自动驾驶汽车的超车系统对象和所建立的DS-OPN模型,利用关联矩阵和可覆盖性树方法检验分析相关的性质。根据关联矩阵以及可覆盖性树的构造方法[17],图2所示的超车系统的Car_B对象子网模型1的可覆盖性树如图7所示,关联矩阵如式(6)所示。在式(6)中,矩阵的行表示的是库所,矩阵的列代表的是变迁。
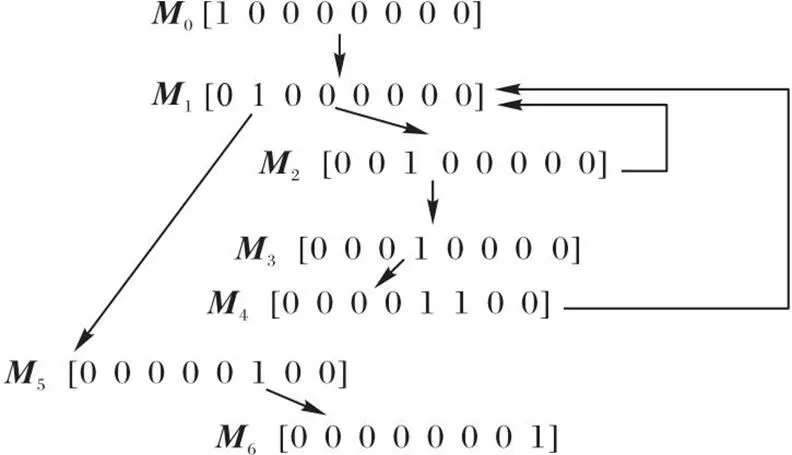
图5 Car_B对象子网模型的可覆盖性树

通过图5的可覆盖性树和式(6)的关联矩阵结合Petri网的相关理论知识,可以分析所建立的超车系统DS-OPN模型的相关性质如下:
1)由图5可知,每个节点的标识向量中都不含无界量,由此可以得出该Petri网模型是有界的。
2)由于模型有界,根据可覆盖性树的可得各个库所的标注为0或者1,所以库所是安全的,证明DS-OPN模型符合CPS安全性要求。
4)由可达性可知,系统各库所可达,网中的每个变迁都可以获得发生权,这说明该模型是活的。
5)模型具有完整性,由可达树可知,DS-OPN模型的所有状态都可以从0可达而且能够激发转移到终止状态6。
6)根据Petri网的守恒理论,结合关联矩阵,存在向量使得T=0,所以该Petri网模型是守恒的。根据矩阵理论可知,当矩阵的秩R()<时,满足T=0存在非零解,即存在正向量,T=0。所以可以得出结论:Car_B对象子网模型2是守恒的。同理也可以得出其他几个对象子网的性质。
3 仿真实验与分析
为验证本文提出的基于DS-OPN模型建模方法的有效性和安全性,使用由德国亚琛工业大学汽车工程研究所发布的HighD数据集[18]进行实验,并与传统的Petri网和时间Petri网(TPN)进行比较。测试的硬件平台为:GeForce GTX 1080Ti,CPU为12核心Intel i7-7800X,16 GB运行内存。使用 Python语言来对数据进行预处理,使用Matlab中的Simulink和Stateflow模块进行仿真实验。
3.1 数据预处理


3.2 实验过程
CPS系统的离散系统部分由Stateflow描述,连续部分则可以用诸如积分器的各种线性和非线性求解器表示,本文中将使用Simulink开发环境对自动驾驶汽车超车的场景进行仿真分析。
仿真中假设21和26为1表示雷达已经感知到50 m内车道上有车的信息,未捕获到则其返回值为0+。对面向对象的时空Petri网超车系统模型按照一定的规则转化为Simulink模型。使用2.1节中的初速度值进行实验。
3.3 实验结果分析
取其中一组实验结果值进行数据分析。图6~8展示了Car_B初速度值为20 m/s时的仿真结果。图6是随着仿真时间的增加车辆的速度变化情况,可以看出,Car_C先以25 m/s的初速度行驶,受前车Car_A减速的影响,Car_C不得不减速避免碰撞,待拉开距离后继续加速行驶;Car_B则先匀速再加速最后减速到25 m/s的速度。

图6 Car_B的速度变化

由图8可知,Car_B起初在最后方行驶,于=5 s超越Car_A和Car_C。
综合分析图6~8,可知=2 s时Car_B开始向左转向超车,进入1车道后在=0.5 s时开始加速行驶,并于=9 s两车相距大于50 m时回到2车道,最后在=12 s时减速行驶至超车前的速度完成超车。综上可知所建立的DS-OPN模型能够准确模拟出超车系统的场景,即该建模方法是正确、有效的。
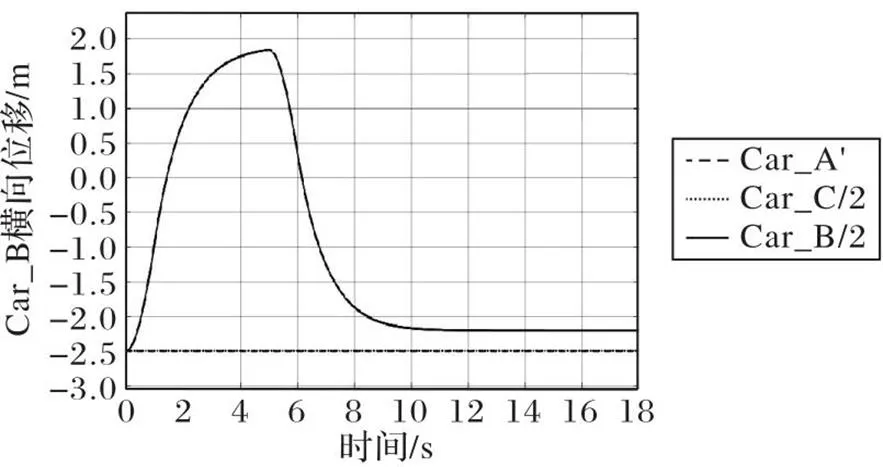
图7 P11的令牌数目变化过程
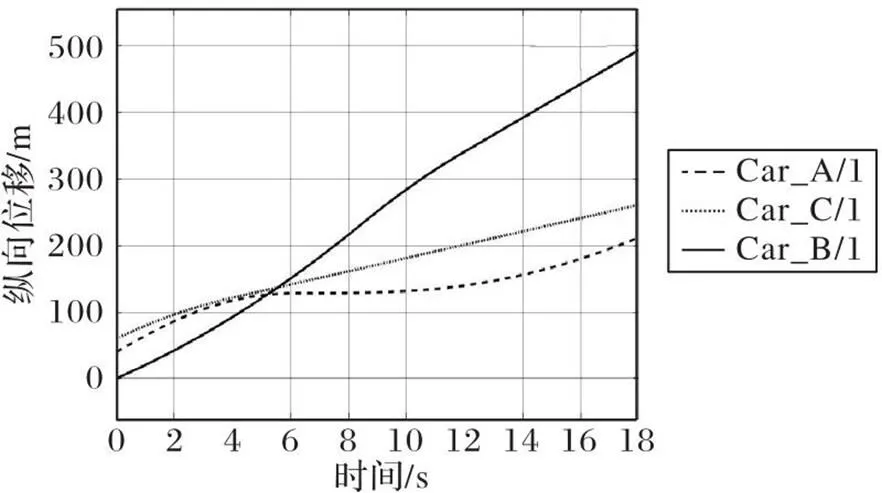
图8 车辆纵向位移变化过程
仿真和验证结果表明,该建模方法建立的模型对系统流程的逻辑结构表现清晰,对时空因素的计算与判断准确,从定量和定性两方面保证了方法的有效性、简洁性和可靠性。该建模方法能提高CPS软件设计的可信性、扩展性和重用性,为CPS系统设计和工业生产提供可行的解决方案。
面向对象的时空Petri网(DS-OPN)相较于普通的时空Petri网(IPN)或者面向对象的Petri网(OPN),具有以下几个优势:
1)既能够准确描述物理对象在系统中的时间和空间信息,又能以面向对象的封装和继承特性,降低系统模型的复杂性,提高它的可裁剪性和可重用性。
2)面向对象时空Petri网建模方法建立的模型在一定程度上简化了复杂的CPS,使研究更加简洁、方便、高效;同时也便于工程师在CPS设计初期发现系统漏洞,提高系统设计的安全性,减少经济损失或者危害。
3)便于与CPS进行匹配,从而为CPS的发展提供助力。随着CPS的应用越来越广泛,DS-OPN应用也越来越广。
4 结语
本文研究了CPS时空特性的建模方法,提出了一种结合CPS时空特性的对象时空Petri网建模方法,通过性质检验和实验表明该建模方法可有效描述CPS时空方面特性,证明了该方法满足了CPS实时性、安全性要求,可以有效降低CPS系统的复杂性,所建立的模型不仅有对象模型的模块化、可重用、可扩展等特性,还有Petri网的结构化、形式化、逻辑关系清晰的特性,解决了传统CPS建模方法无法对CPS时空特性建模的问题,可以提高CPS系统设计的实时性和安全性,减少经济损失或者危害,促进CPS系统的发展,应用前景广阔。
当然,对于车辆更多、道路更加复杂的应用场景,所建立的模型也将更加复杂。我们下一步的研究工作包含增强DS-OPN方法的适用场景,构建真实CPS系统并获取数据进行测试,研究以更多更加复杂的应用实例来优化和完善该方法。
[1] FRANCO J, ARIS A, CANBERK B, et al. A survey of honeypots and honeynets for internet of things, industrial internet of things, and cyber-physical systems[J]. IEEE Communications Surveys and Tutorials, 2021, 23(4): 2351-2383.
[2] YAN C, MA J. Mechanism of integration of informatization and industrialization based on a fuzzy stochastic model[J]. IAENG International Journal of Applied Mathematics, 2021, 51(2): No.18.
[3] CHEN L, TANG S, BALASUBRAMANIAN V, et al. Physical-layer security based mobile edge computing for emerging cyber physical systems[J]. Computer Communications, 2022, 194: 180-188.
[4] KRISHNA M, CHOWDARY S M B, NANCY P, et al. A survey on multimedia analytics in security systems of cyber physical systems and IoT[C]// Proceedings of the 2nd International Conference on Smart Electronics and Communication. Piscataway: IEEE, 2021: 1-7.
[5] MAHMOUD M S, HAMDAN M M, BAROUDI U A. Modeling and control of cyber-physical systems subject to cyber attacks: a survey of recent advances and challenges[J]. Neurocomputing, 2019, 338: 101-115.
[6] WIŚNIEWSKI R, BAZYDŁO G, SZCZEŚNIAK P, et al. Petri net-based specification of cyber-physical systems oriented to control direct matrix converters with space vector modulation[J]. IEEE Access, 2019, 7: 23407-23420.
[7] 宋相君,张广泉. 基于扩展混成Petri网的CPS无人车系统建模与分析[J]. 计算机科学, 2017, 44(7):21-24.(SONG X J, ZHANG G Q. Modeling and analysis of CPS unmanned vehicle system based on extended hybrid Petri net[J]. Computer Science, 2017, 44(7): 21-24.)
[8] HU H, YU J, LI Z, et al. Modeling and analysis of cyber-physical system based on object-oriented generalized stochastic Petri net[J]. IEEE Transactions on Reliability, 2021, 70(3): 1271-1285.
[9] CHEN X, ZHU Y, ZHAO Y, et al. Hybrid modeling and model transformation of AADL for verifying the properties of CPS space-time compositions[J]. IEEE Access, 2021, 9: 99539-99551.
[10] 陈小颖,祝义,赵宇,等. 面向CPS时空性质验证的混成AADL建模与模型转换方法[J]. 软件学报, 2021, 32(6):1779-1798.(CHEN X Y, ZHU Y, ZHAO Y, et al. Hybrid AADL modeling and model transformation for CPS time and space property verification[J]. Journal of Software, 2021, 32(6): 1779-1798.)
[11] 王婷,苏琪,陈铁明. 结合关注事件的时间自动机语言包含模型检测[J]. 小型微型计算机系统, 2019, 40(12):2578-2584.(WANG T, SU Q, CHEN T M. Language inclusion checking of timed automata with attention events[J]. Journal of Chinese Computer Systems, 2019, 40(12): 2578-2584.)
[12] HUANG E, McGINNIS L F, MITCHELL S W. Verifying SysML activity diagrams using formal transformation to Petri nets[J]. Systems Engineering, 2020, 23(1): 118-135.
[13] KAMBLE S S, GUNASEKARAN A, GAWANKAR S A. Sustainable Industry 4.0 framework: a systematic literature review identifying the current trends and future perspectives[J]. Process Safety and Environmental Protection, 2018, 117: 408-425.
[14] JYOTISH N K, SINGH L K, KUMAR C. A state-of-the-art review on performance measurement Petri net models for safety critical systems of NPP[J]. Annals of Nuclear Energy, 2022, 165: No.108635.
[15] GE N, DAL ZILIO S, LIU H, et al. RT-MOBS: a compositional observer semantics of time Petri net for real-time property specification language based on-calculus[J]. Science of Computer Programming, 2021, 206: No.102624.
[16] DUGGIMPUDI M B, ABBADY S, CHEN J, et al. Spatio-temporal outlier detection algorithms based on computing behavioral outlierness factor[J]. Data and Knowledge Engineering, 2019, 122: 1-24.
[17] FERNÁNDEZ I A, CORTABARRIA J C M, ECHEVERRIA L E. Petri net implementation in programmable logic controllers: methodology for development and validation[C]// Proceedings of the IEEE 19th World Symposium on Applied Machine Intelligence and Informatics. Piscataway: IEEE, 2021: 15-20.
[18] TSIGKANOS C, KEHRER T, GHEZZI C. Modeling and verification of evolving cyber-physical spaces[C]// Proceedings of the 11th Joint Meeting on Foundations of Software Engineering. New York: ACM, 2017: 38-48.
Modeling and simulation of CPS based on object spatiotemporal Petri net
DENG Liangliang, ZHANG Lichen, JIANG Wenchao*
(,,510006,)
Cyber-Physical System (CPS) is a distributed real-time feedback system that integrates computing, control, communication and physical elements, but the traditional modeling methods cannot meet the high requirements of CPS for spatiotemporal performance. To address this problem, a modeling method for Duration-Space Object Petri Net (DS-OPN) was proposed. Firstly, the object-oriented encapsulation technology and spatiotemporal elements were integrated into the Petri net, and the spatial and temporal description rules were designed to encapsulate scenario elements under the same object into the same object subnet system model. Secondly, the aggregation rules were defined to aggregate various subnet models to enable these models to describe the object change process in the CPS physical topology environment. Finally, taking the traffic CPS as an example, the dynamic behavior of the autonomous control overtaking system was modeled and simulated; at the same time, the coverability tree and the incidence matrix of the model were established to verify the model’s reachability and safety. Experimental results show that the model modeled by the proposed method has a clear representation of the logical structure of the system flow as well as accurate calculation of spatiotemporal factors, and meets the requirements of CPS in terms of real-time performance and security, which verifies the effectiveness and security of the modeling method.
Cyber-Physical System (CPS); modeling and simulation; spatiotemporal characteristic; object-oriented; Petri net
1001-9081(2023)11-3334-06
10.11772/j.issn.1001-9081.2022111759
2022⁃09⁃26;
2023⁃02⁃12;
国家自然科学基金资助项目(61873068)。
邓亮亮(1995—),男,江西赣州人,硕士研究生,CCF会员,主要研究方向:分布式与实时控制系统、信息物理融合系统; 张立臣(1962—),男,吉林长春人,教授,博士,主要研究方向:云计算、信息物理融合系统; 姜文超(1977—),男,山东潍坊人,副教授,博士,CCF会员,主要研究方向:云计算、大数据、复杂网络、图数据处理。
TP391.9
A
2023⁃02⁃15。
This work is partially supported by National Natural Science Foundation of China (61873068).
DENG Liangliang, born in 1995, M. S. candidate. His research interests include distributed and real-time control systems, cyber-physical system.
ZHANG Lichen, born in 1962, Ph. D., professor. His research interests include cloud computing, cyber-physical system.
JIANG Wenchao, born in 1977, Ph. D., associate professor. His research interests include cloud computing, big data, complex networks, graph data processing.
