基于改进VFC算法的无人机影像匹配方法
2023-11-22冯木养
冯木养
(广东联合金地不动产评估勘测设计有限公司 广东韶关 512000)
1 引言
随着无人机技术的不断发展,无人机技术已在地质灾害监测、电力线路巡检和交通物流方面得到了广泛应用[1-2]。相比人工拍摄,无人机拍摄的图像往往存在旋转角度大、覆盖范围小和图像畸变等问题,这也是造成无人机图像匹配困难的原因[3-4]。目前针对无人机图像匹配,专家学者们进行了大量研究,提出了一些匹配算法。文献[5]针对无人机影像匹配精度较低的问题,采用POS数据消除几何形变、Harris 算子提取特征点和多层次约束匹配等策略对SIFT 算法进行了改进,提出了一种基于改进SIFT 算法倾斜无人机影像匹配方法,通过仿真分析验证了该匹配方法的实用性。本文利用K 最近邻算法剔除误匹配的特征点,采用K 最近邻算法对VFC 算法进行改进,提出了一种基于改进VFC 算法的无人机影像匹配方法。采用无人机拍摄影像进行仿真验证,并与RANSAC 算法和VFC 算法对比,对本文所提无人机影像匹配方法的有效性和实用性进行验证。
2 算法介绍
2.1 随机采样一致性算法
随机抽样一致性算法(RANdom Sample Consensus,RANSAC)是Fischler 等人提出的一种特征点提取方法[6]。RANSAC 算法提取特征点的主要步骤如下:
(1)令待匹配点集合为M,容纳最优点的集合为N,随机在M中选择四个不共线的特征点,计算原始图像的单映射矩阵H,具体如下:
(2)将M中剩下的特征点进行遍历,计算矩阵H与特征点之间的投影误差,并将计算结果与预先设定的阈值γ进行对比,投影误差比小的特征点称为内点,内点集合为Q,反之称为外点,外点需要剔除。投影误差的计算公式为:
(3)对比集合Q和集合N中的元素个数,如果集合Q的元素个数比集合N的多,则表明集合Q是最优特征点集合。否则就不属于,然后重复步骤(1)和(2)重新计算。
(4)如果迭代次数超过最大迭代次数,则停止迭代。
(5)获得特征点集合,并提出不满足条件的特征点。
2.2 向量场一致性算法
向量场一致性算法(Vector Field Consensus,VFC)是一种特征点剔除方法[7]。VFC 算法的原理是根据建立影像运动场集合,通过插值拟合的方式剔除错误特征点。
(1)模型建立
式中:a为输出空间维度
根据向量场信息和贝叶斯准则,可以得到θ的最大后验估计解为:
对式(4)中的求解即可确定向量场f的值。
(2)期望最大化算法求解
期望最大化算法(Expectation-Maximization,EM)是由Dempster等提出的。它是通过计算期望(E步)和最大化(M步)并不断交叉迭代实现的。
利用EM算法可以计算完全数据对数后验函数。其表达式为:
在E 步中,可以使用θold的参数对隐变量后验分布进行求解,令对角矩阵为P= diag(p1,p2,…,pn),pn=P(Zn= 1|xn,yn,θold)表示后验概率,利用Bayes准则对进行求解。具体如下:
在M 步中,使用θold= arg maxθQ(θ,θold)更新参数
σ2和γ,进行微分计算可得:
进而可以得到正则化风险函数,其表达式为:
根据Hilbert空间的等价性,对核矩阵进行定义,假设在函数空间H中存在向量场f,则f的最优解为
式 中:Γ~为 分 块 矩 阵;
通过反复迭代,当EM算法收敛时就可以确定向量场f。
2.3 K最近邻算法
K 最近邻算法是一种典型的数据挖掘分类方法[8]。利用K最近邻算法进行图像匹配的步骤如下:
(1)在原始图像中提取特征点Q,计算待匹配图像中的特征点与Q之间的距离。
(2)寻找与特征点Q最近的特征点,和第二近的特征点,并分别记录它们的距离dQn和dQm。
(3)设定距离阈值T,如果满足,则认为特征点与原始图像可以匹配,否则不能匹配。
(4)重复步骤(1)~(3),找出所有能够匹配的特征点。
3 改进VFC特征匹配方法
利用VFC 算法进行图像特征匹配时,往往存在误匹配点无法完全剔除等问题。为此,本文采用K最近邻算法对VFC算法进行改进,以提高匹配精度。采用改进VFC 算法进行无人机影响匹配的步骤如下,匹配流程如图1所示。

图1 改进VFC算法匹配流程图
4 实验与分析
采用两组无人机拍摄的图像进行匹配试验,其参数如表1所示。
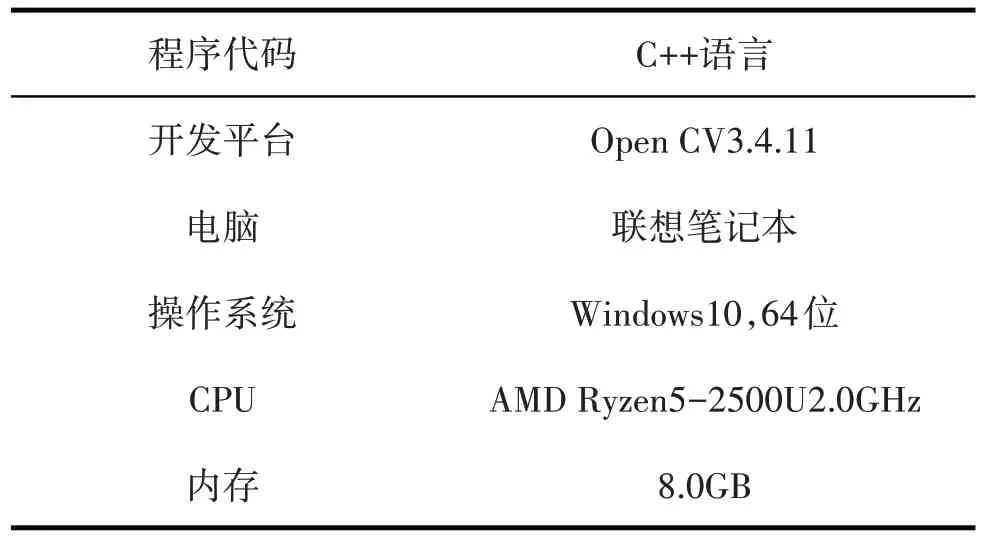
表1 实验平台参数
首先对两组无人机拍摄的图像进行粗匹配,匹配结果如图2所示。通过粗匹配,在图a的原始图像中共获得4910个特征点,待匹配图像中获得4968个特征点,粗匹配建立的特征点对的个数为4910;在图b 的原始图像中共获得2528 个特征点,待匹配图像中获得1797 个特征点,粗匹配建立的特征点对的个数为2528。

图2 粗匹配结果
采用本文所提改进VFC算法对无人机拍摄图像进行精准匹配,为了对比分析,同时采用RANSAC 算法和VFC 算法进行匹配,三种算法均有较好的匹配效果,但通过对比可以发现,改进VFC算法匹配正确点的个数多于RANSAC 算法和VFC 算法,匹配效果更好。同时,可以看到采用RANSAC 算法和VFC 算法匹配后的图像存在一些错误匹配点,而采用改进VFC 算法匹配的图像将错误的匹配点全部剔除,并在图中间位置和左下角位置保留了更多匹配点对,相比RANSAC算法和VFC算法,匹配效果更好[9]。
三种算法对无人机影像的匹配结果如图3 所示,由图3 可知,改进VFC 算法对图像a 和b 的匹配正确率均在85% 以上,匹配正确率显著高于RANSAC 算法和VFC 算法,验证了本文所提无人机影像匹配方法的正确性和实用性。
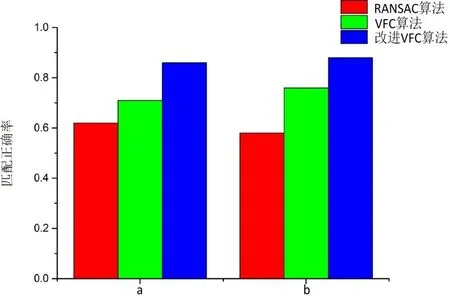
图3 三种算法匹配结果的正确率
5 结束语
本文提出了一种基于改进VFC算法的无人机影像匹配方法:采用K 最近邻算法对VFC 算法进行改进,以提高无人机影像匹配精度。采用实际图像进行仿真分析,并与其他无人机匹配方法进行对比,结果表明,改进VFC算法能够将所有误匹配点剔除,图像匹配正确率均在85%以上,明显高于RANSAC 算法和VFC 算法,验证了本文所提无人机影像匹配方法的正确性和实用性。